JP2013148199A - モータグレーダ - Google Patents
モータグレーダ Download PDFInfo
- Publication number
- JP2013148199A JP2013148199A JP2012011085A JP2012011085A JP2013148199A JP 2013148199 A JP2013148199 A JP 2013148199A JP 2012011085 A JP2012011085 A JP 2012011085A JP 2012011085 A JP2012011085 A JP 2012011085A JP 2013148199 A JP2013148199 A JP 2013148199A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- clutch
- vehicle speed
- hydraulic pressure
- hydraulic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2253—Controlling the travelling speed of vehicles, e.g. adjusting travelling speed according to implement loads, control of hydrostatic transmission
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/7636—Graders with the scraper blade mounted under the tractor chassis
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/80—Component parts
- E02F3/84—Drives or control devices therefor, e.g. hydraulic drive systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/202—Mechanical transmission, e.g. clutches, gears
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/04—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/0059—Braking of gear output shaft using simultaneous engagement of engaging means, e.g. clutches or brakes, applied for different gear ratios
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/411—Bulldozers, Graders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Automation & Control Theory (AREA)
- Control Of Transmission Device (AREA)
- Control Of Fluid Gearings (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Operation Control Of Excavators (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【解決手段】このモータグレーダは、エンジン8と、前後の走行輪5,6と、前後進切換用及び速度段切換用の複数の油圧クラッチを有しエンジン8からの動力を変速して前後の走行輪の少なくとも一方に伝達するためのトランスミッション10と、整地用のブレード32を含む作業機4と、微速走行制御手段と、車速調整つまみ21と、を備えている。微速走行制御手段は、前進1速での走行時にトランスミッションの油圧クラッチの1つを制動用クラッチとして作動させて微速走行を行わせる。車速調整つまみ21は微速走行時の車速を任意の速度に設定するための部材である。
【選択図】図4
Description
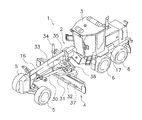
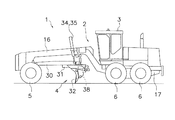
本発明の一実施形態によるモータグレーダ1の外観斜視図及び側面図を図1及び図2に示す。モータグレーダ1は、整地作業、除雪作業、軽切削、材料混合等の作業を行う車両である。このモータグレーダ1は、フレーム2、運転室3、作業機4、1対の前輪5、及び片側2輪ずつの後輪6を備えている。また、図3に示すように、モータグレーダ1は、エンジン8、トルクコンバータ9及びトランスミッション10を含む動力伝達機構11、走行機構12、油圧駆動機構13、制御部14等を備えている。
フレーム2は、図1及び図2に示すように前部フレーム16及び後部フレーム17によって構成されている。
作業機4は、ドローバ30、サークル31、ブレード32、油圧モータ33、各種の油圧シリンダ34〜38を有している。
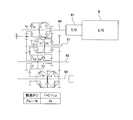
図3に示すように、エンジン8には、燃料噴射ポンプ40が付設されており、燃料噴射ポンプ40からエンジン8に燃料が供給される。その供給量は、後述する制御部14から電子ガバナ41に出力される指令信号によって制御される。なお、エンジン8の回転数は、エンジン回転数センサ42によって検知され、検知信号として制御部14へ送られる。制御部14は、電子ガバナ41へ指令信号を送ることにより、エンジン8への燃料の供給量を制御して、エンジン8の回転数を制御することができる。
動力伝達機構11は、エンジン8からの駆動力を後輪6に伝達するための機構であり、前述のように、トルクコンバータ9及びトランスミッション10を有している。
走行機構12は、図示しない最終減速機、タンデム装置55、後輪6を有しており、動力伝達機構11を介してエンジン8からの駆動力が入力される。ここでは、トランスミッション10から出力された駆動力は、最終減速機及びタンデム装置55を介して後輪6に伝達され、後輪6が回転駆動される。
油圧駆動機構13は、エンジン8からの駆動力によって油圧を発生させ、油圧によって各種のクラッチFL,FH,C1〜C4、油圧モータ33,各種のシリンダ34〜38を駆動するための機構である。油圧駆動機構13は、第1油圧ポンプP1、第2油圧ポンプP2、各種の油圧制御弁61〜66,70〜77を有する。
制御部14は、図3及び図4に示すように、エンジン制御部14a及びトランスミッション制御部14bを含み、操作部17からの操作信号や各種センサからの検知信号などに基づいて、各部を制御する。また、制御部14は、第1〜第5シリンダ制御弁61〜65や油圧モータ制御弁66を制御することによって、作業機4を制御することができる。
微速走行を行うためには、前進1速で走行している際に、前進1速のための油圧クラッチを係合することに加えて、逆回転あるいは前進1速での回転速度よりも遅い回転数で回転している部分の油圧クラッチを係合して、2重係合状態にする必要がある。そこで、2重係合の例として、以下に3つの態様を示す。
図5に示す例は、図3に示したトランスミッション10の構成をより具体的に示したものである。すなわち、この図5に示すトランスミッション10は、前後進切換用クラッチとして、前進低速用クラッチFL、前進高速用クラッチFH、及び後進用クラッチRを有し、変速段切換用クラッチとして第1〜第4クラッチC1〜C4を有している。そして、前進低速用クラッチFL及び後進用クラッチRは入力軸90に配置され、前進高速用クラッチFH及び第1クラッチC1は第1中間軸91に配置され、第2及び第3クラッチC2,C3は第2中間軸92に配置され、第4クラッチC4は出力軸93に配置されている。
図6に示す例も、図5に示した例1と同様に、前後進切換用クラッチとして、前進低速用クラッチFL、前進高速用クラッチFH、及び後進用クラッチRを有し、変速段切換用クラッチとして第1〜第4クラッチC1〜C4を有している。また、各クラッチの配置も図5に示す例1と同様である。
図7に示す例は、例1,2とクラッチの構成及び配置が異なっている。この例3では、図3に示したトランスミッション10とは異なり、前後進切換用クラッチとして、前進用クラッチF及び後進用クラッチRが設けられ、速度段切換用クラッチとして、第1〜第4クラッチC1〜C4に加えて、低速用クラッチLo及び高速用クラッチHiが設けられている。ここでは、前進8速、後進8速の変速段が得られる。そして、前進用クラッチF及び後進用クラッチRは入力軸90に配置され、第1及び第2クラッチC1,C2は第1中間軸91に配置され、第3及び第4クラッチC3,C4は第2中間軸92に配置され、低速用クラッチLo及び高速用クラッチHiは出力軸93に配置されている。
図8のフローチャートにしたがって、微速走行制御(1)について説明する。微速制御は、操作部17の車速調整つまみ21を押すことにより開始される。また、微速走行時の車速については、車速調整つまみ21を回すことによって任意に設定が可能である。
・後進用クラッチRの最大油圧Prmax
・後進用クラッチRの最小油圧Prmin
・後進用クラッチRの油圧増加量ΔPra
・後進用クラッチRの油圧減少量ΔPrb
また、ステップS4では初期設定として、後進用クラッチRのクラッチ油圧PrをPrmaxに設定する。また、アイドルエンジン回転数NをN0とする。
車速Vが目標最高車速Va1より高い場合は、車速を抑える必要があるので、制動力を大きくするために、ステップS11からステップS12に移行する。ステップS12では、後進用クラッチRの現状の油圧PrをΔPraだけ増加させる。これにより、後進用クラッチRの伝達力が増加し、制動力が大きくなって、車速が低下する。
車速Vが目標最高車速Va1より低い場合は、ステップS11からステップS15に移行する。ステップS15では、車速Vが目標最低車速Va2よりも高いか否かを判断する。車速Vが目標最低車速Va2よりも高い場合は、車速Vは適切な車速であるので、ステップS15からステップS16に移行し、後進用クラッチRのクラッチ油圧をそのままの油圧に維持してステップS7に戻る。
図9に、以上の処理を実行した場合の、前進1速用クラッチへの油圧指令値の変化(a)、制動用クラッチ(後進用クラッチR)への油圧指令値の変化(b)、車速の変化(c)、エンジン回転数の変化(d)を示している。この微速走行制御(1)では、エンジン回転数はローアイドル回転数に維持される。また、ここでは、微速走行の車速として、0.8km/hが設定された場合を例にとって示している。車速0.8km/h(V0)が設定された場合は、目標車速Va1〜Va2として0.6〜1.0km/hが設定される。
前述のような微速走行制御(1)によって作業を行っている際に、登坂しなければならない場合がある。このような場合には、車速調整つまみ21で設定された車速に到達しない場合が多く、また牽引力の低下が著しくなって作業性が低下する。
ステップQ12からステップQ15までの処理は、図8におけるステップS11からステップS14までの処理と同様である。
ステップQ16からステップQ20までの処理は、図8におけるステップS15からステップS19までの処理と同様である。
図11に、以上の処理を実行した場合の、前進1速用クラッチへの油圧指令値の変化(a)、制動用クラッチ(後進用クラッチR)への油圧指令値の変化(b)、車速の変化(c)、エンジン回転数の変化(d)を示している。ここでは、前述の例と同様に、微速走行の車速として、0.8km/hが設定され、その場合の目標車速Va1〜Va2として0.6〜1.0km/hが設定された場合を示している。
(1)車速調整つまみ21によって微速走行時の車速を任意に設定することができる。このため、作業状況に応じて常に適切な車速を得ることができる。
本発明は以上のような実施形態に限定されるものではなく、本発明の範囲を逸脱することなく種々の変形又は修正が可能である。
4 作業機
5 前輪
6 後輪
8 エンジン
10 トランスミッション
14 制御部
32 ブレード
本発明の一実施形態によるモータグレーダ1の外観斜視図及び側面図を図1及び図2に示す。モータグレーダ1は、整地作業、除雪作業、軽切削、材料混合等の作業を行う車両である。このモータグレーダ1は、フレーム2、運転室3、作業機4、1対の前輪5、及び片側2輪ずつの後輪6を備えている。また、図3に示すように、モータグレーダ1は、エンジン8、トルクコンバータ9及びトランスミッション10を含む動力伝達機構11、走行機構12、油圧駆動機構13、制御部14等を備えている。
フレーム2は、図1及び図2に示すように前部フレーム16及び後部フレーム17によって構成されている。
作業機4は、ドローバ30、サークル31、ブレード32、油圧モータ33、各種の油圧シリンダ34〜38を有している。
図3に示すように、エンジン8には、燃料噴射ポンプ40が付設されており、燃料噴射ポンプ40からエンジン8に燃料が供給される。その供給量は、後述する制御部14から電子ガバナ41に出力される指令信号によって制御される。なお、エンジン8の回転数は、エンジン回転数センサ42によって検知され、検知信号として制御部14へ送られる。制御部14は、電子ガバナ41へ指令信号を送ることにより、エンジン8への燃料の供給量を制御して、エンジン8の回転数を制御することができる。
動力伝達機構11は、エンジン8からの駆動力を後輪6に伝達するための機構であり、前述のように、トルクコンバータ9及びトランスミッション10を有している。
走行機構12は、図示しない最終減速機、タンデム装置55、後輪6を有しており、動力伝達機構11を介してエンジン8からの駆動力が入力される。ここでは、トランスミッション10から出力された駆動力は、最終減速機及びタンデム装置55を介して後輪6に伝達され、後輪6が回転駆動される。
油圧駆動機構13は、エンジン8からの駆動力によって油圧を発生させ、油圧によって各種のクラッチFL,FH,C1〜C4、油圧モータ33,各種のシリンダ34〜38を駆動するための機構である。油圧駆動機構13は、第1油圧ポンプP1、第2油圧ポンプP2、各種の油圧制御弁61〜66,70〜77を有する。
制御部14は、図3及び図4に示すように、エンジン制御部14a及びトランスミッション制御部14bを含み、操作部17からの操作信号や各種センサからの検知信号などに基づいて、各部を制御する。また、制御部14は、第1〜第5シリンダ制御弁61〜65や油圧モータ制御弁66を制御することによって、作業機4を制御することができる。
微速走行を行うためには、前進1速で走行している際に、前進1速のための油圧クラッチを係合することに加えて、逆回転あるいは前進1速での回転速度よりも遅い回転数で回転している部分の油圧クラッチを係合して、2重係合状態にする必要がある。そこで、2重係合の例として、以下に3つの態様を示す。
図5に示す例は、図3に示したトランスミッション10の構成をより具体的に示したものである。すなわち、この図5に示すトランスミッション10は、前後進切換用クラッチとして、前進低速用クラッチFL、前進高速用クラッチFH、及び後進用クラッチRを有し、変速段切換用クラッチとして第1〜第4クラッチC1〜C4を有している。そして、前進低速用クラッチFL及び後進用クラッチRは入力軸90に配置され、前進高速用クラッチFH及び第1クラッチC1は第1中間軸91に配置され、第2及び第3クラッチC2,C3は第2中間軸92に配置され、第4クラッチC4は出力軸93に配置されている。
図6に示す例も、図5に示した例1と同様に、前後進切換用クラッチとして、前進低速用クラッチFL、前進高速用クラッチFH、及び後進用クラッチRを有し、変速段切換用クラッチとして第1〜第4クラッチC1〜C4を有している。また、各クラッチの配置も図5に示す例1と同様である。
図7に示す例は、例1,2とクラッチの構成及び配置が異なっている。この例3では、図3に示したトランスミッション10とは異なり、前後進切換用クラッチとして、前進用クラッチF及び後進用クラッチRが設けられ、速度段切換用クラッチとして、第1〜第4クラッチC1〜C4に加えて、低速用クラッチLo及び高速用クラッチHiが設けられている。ここでは、前進8速、後進8速の変速段が得られる。そして、前進用クラッチF及び後進用クラッチRは入力軸90に配置され、第1及び第2クラッチC1,C2は第1中間軸91に配置され、第3及び第4クラッチC3,C4は第2中間軸92に配置され、低速用クラッチLo及び高速用クラッチHiは出力軸93に配置されている。
図8のフローチャートにしたがって、微速走行制御(1)について説明する。微速制御は、操作部17の車速調整つまみ21を押すことにより開始される。また、微速走行時の車速については、車速調整つまみ21を回すことによって任意に設定が可能である。
・目標車速Va1,Va2:設定車速V0に対する所定の車速範囲(最高車速=Va1、最低車速=Va2)
・後進用クラッチRの最大油圧Prmax
・後進用クラッチRの最小油圧Prmin
・後進用クラッチRの油圧増加量ΔPra
・後進用クラッチRの油圧減少量ΔPrb
また、ステップS4では初期設定として、後進用クラッチRのクラッチ油圧PrをPrmaxに設定する。また、アイドルエンジン回転数NをN0とする。
・アクセルペダルがオフ(踏み込み量=0)であること。
・前進1速が選択されていること。
・インチングペダルがオフ(踏み込み量=0)であること。
・トルクコンバータを介して動力が伝達されるモード(T/Cモード)が選択されていること。
車速Vが目標最高車速Va1より高い場合は、車速を抑える必要があるので、制動力を大きくするために、ステップS11からステップS12に移行する。ステップS12では、後進用クラッチRの現状の油圧PrをΔPraだけ増加させる。これにより、後進用クラッチRの伝達力が増加し、制動力が大きくなって、車速が低下する。
車速Vが目標最高車速Va1より低い場合は、ステップS11からステップS15に移行する。ステップS15では、車速Vが目標最低車速Va2よりも高いか否かを判断する。車速Vが目標最低車速Va2よりも高い場合は、車速Vは適切な車速であるので、ステップS15からステップS16に移行し、後進用クラッチRのクラッチ油圧をそのままの油圧に維持してステップS7に戻る。
図9に、以上の処理を実行した場合の、前進1速用クラッチへの油圧指令値の変化(a)、制動用クラッチ(後進用クラッチR)への油圧指令値の変化(b)、車速の変化(c)、エンジン回転数の変化(d)を示している。この微速走行制御(1)では、エンジン回転数はローアイドル回転数に維持される。また、ここでは、微速走行の車速として、0.8km/hが設定された場合を例にとって示している。車速0.8km/h(V0)が設定された場合は、目標車速Va1〜Va2として0.6〜1.0km/hが設定される。
時刻t4で微速走行制御の終了指示がなされると、後進用クラッチRへの油圧指令値は「0」になり、車速も1.3km/hに上昇する。
前述のような微速走行制御(1)によって作業を行っている際に、登坂しなければならない場合がある。このような場合には、車速調整つまみ21で設定された車速に到達しない場合が多く、また牽引力の低下が著しくなって作業性が低下する。
ステップQ12からステップQ15までの処理は、図8におけるステップS11からステップS14までの処理と同様である。
ステップQ16からステップQ20までの処理は、図8におけるステップS15からステップS19までの処理と同様である。
図11に、以上の処理を実行した場合の、前進1速用クラッチへの油圧指令値の変化(a)、制動用クラッチ(後進用クラッチR)への油圧指令値の変化(b)、車速の変化(c)、エンジン回転数の変化(d)を示している。ここでは、前述の例と同様に、微速走行の車速として、0.8km/hが設定され、その場合の目標車速Va1〜Va2として0.6〜1.0km/hが設定された場合を示している。
(1)車速調整つまみ21によって微速走行時の車速を任意に設定することができる。このため、作業状況に応じて常に適切な車速を得ることができる。
本発明は以上のような実施形態に限定されるものではなく、本発明の範囲を逸脱することなく種々の変形又は修正が可能である。
4 作業機
5 前輪
6 後輪
8 エンジン
10 トランスミッション
14 制御部
32 ブレード
Claims (6)
- エンジンと、
前後の走行輪と、
前後進切換用及び速度段切換用の複数の油圧クラッチを有し、前記エンジンからの動力を変速して前記前後の走行輪の少なくとも一方に伝達するためのトランスミッションと、
整地用のブレードを含む作業機と、
前進低速度段での走行時に前記トランスミッションの油圧クラッチの1つを制動用クラッチとして作動させて微速走行を行わせる微速走行制御手段と、
前記微速走行時の車速を任意の速度に設定するための微速調整部材と、
を備えたモータグレーダ。 - 前記微速走行制御手段は、後進用油圧クラッチを前記制動用クラッチとして作動させる、請求項1に記載のモータグレーダ。
- 前記トランスミッションは前進低速用油圧クラッチ及び前進高速用油圧クラッチを有しており、
前記微速走行制御手段は、前記前進低速用油圧クラッチ及び速度段切換用油圧クラッチを係合して前進1速での走行時に前記前進高速用油圧クラッチを前記制動用クラッチとして作動させる、
請求項1に記載のモータグレーダ。 - 車速を検出する車速検出センサをさらに備え、
前記微速走行制御手段は、前記車速検出センサの検出結果に基づいて、車速が前記微速調整部材で設定された設定車速を含む所定範囲内の目標車速になるように前記制動用クラッチへの供給油圧を制御する、
請求項1から3のいずれかに記載のモータグレーダ。 - 前記微速走行制御手段は、前記制動用クラッチへの供給油圧を所定油圧以下にしても車速が前記目標車速にならない場合に、エンジンの回転数を上昇させる、請求項4に記載のモータグレーダ。
- 前記微速走行制御手段は、前記制動用クラッチへの供給油圧を所定油圧以下にしても所定処理時間内に車速が前記目標車速にならない場合に、エンジンの回転数を上昇させる、請求項5に記載のモータグレーダ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011085A JP5367853B2 (ja) | 2012-01-23 | 2012-01-23 | モータグレーダ |
| CN201280058536.8A CN103958939B (zh) | 2012-01-23 | 2012-12-21 | 机动平地机 |
| US14/363,517 US9334628B2 (en) | 2012-01-23 | 2012-12-21 | Motor grader |
| DE112012005730.9T DE112012005730T5 (de) | 2012-01-23 | 2012-12-21 | Motorgrader |
| PCT/JP2012/083213 WO2013111486A1 (ja) | 2012-01-23 | 2012-12-21 | モータグレーダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011085A JP5367853B2 (ja) | 2012-01-23 | 2012-01-23 | モータグレーダ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013148199A true JP2013148199A (ja) | 2013-08-01 |
| JP5367853B2 JP5367853B2 (ja) | 2013-12-11 |
Family
ID=48873225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012011085A Expired - Fee Related JP5367853B2 (ja) | 2012-01-23 | 2012-01-23 | モータグレーダ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9334628B2 (ja) |
| JP (1) | JP5367853B2 (ja) |
| CN (1) | CN103958939B (ja) |
| DE (1) | DE112012005730T5 (ja) |
| WO (1) | WO2013111486A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110199142A (zh) * | 2017-06-27 | 2019-09-03 | 株式会社小松制作所 | 作业车辆、及作业车辆的控制方法 |
| JP2022043418A (ja) * | 2020-09-04 | 2022-03-16 | 鹿島道路株式会社 | 重機の自動制動装置 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3017848B1 (fr) * | 2014-02-25 | 2017-07-14 | Tld Europe | Procede de limitation de vitesse pour vehicule aeroportuaire |
| GB2527100B (en) * | 2014-06-12 | 2017-11-08 | Jaguar Land Rover Ltd | Hill ascent method |
| JP2017145922A (ja) * | 2016-02-18 | 2017-08-24 | いすゞ自動車株式会社 | デュアルクラッチ式変速機の制御装置 |
| US10065641B2 (en) * | 2016-04-15 | 2018-09-04 | Ford Global Technologies, Llc | Brake fade and brake capacity based powertrain operation |
| CN106114508B (zh) * | 2016-07-05 | 2018-06-29 | 徐州徐工筑路机械有限公司 | 一种具有定速巡航功能的平地机控制系统和控制方法 |
| JP7129814B2 (ja) | 2018-04-26 | 2022-09-02 | 株式会社小松製作所 | 作業機械およびその制御方法 |
| CN110158682B (zh) * | 2019-05-06 | 2021-07-02 | 广西柳工机械股份有限公司 | 平地机工作装置液压系统 |
| CN110053477B (zh) * | 2019-05-24 | 2023-11-17 | 徐工集团工程机械股份有限公司科技分公司 | 车桥装置及工程机械 |
| CN110375053B (zh) * | 2019-08-19 | 2024-06-07 | 三一汽车制造有限公司 | 平地机 |
| US11667326B2 (en) * | 2019-09-18 | 2023-06-06 | Deere & Company | Automatic guidance performance improvement and transport with articulated machine form |
| JP2024073225A (ja) * | 2022-11-17 | 2024-05-29 | 株式会社クボタ | 作業車 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001114084A (ja) * | 1999-10-18 | 2001-04-24 | Toyota Autom Loom Works Ltd | 産業車両のクリープ走行制御装置 |
| JP2002295528A (ja) * | 2001-03-28 | 2002-10-09 | Komatsu Ltd | 車両の速度制御装置 |
| JP2003322252A (ja) * | 2002-04-30 | 2003-11-14 | Komatsu Forklift Co Ltd | 産業車両の走行制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59126044A (ja) * | 1983-01-07 | 1984-07-20 | Diesel Kiki Co Ltd | 車速制御装置 |
| DE69212446T2 (de) * | 1991-12-19 | 1996-11-28 | Mitsubishi Heavy Ind Ltd | Elektronisch, gesteuertes, automatisches Getriebe eines Fahrzeugs |
| KR100527824B1 (ko) * | 2000-09-08 | 2005-11-09 | 히다치 겡키 가부시키 가이샤 | 휠식 유압 주행 차량의 속도 제어 장치 |
| JP4067310B2 (ja) * | 2002-01-17 | 2008-03-26 | ヤンマー農機株式会社 | 田植機 |
| US7854681B2 (en) * | 2007-04-30 | 2010-12-21 | Caterpillar Inc | System for controlling a machine with a continuously variable transmission |
| US8758181B2 (en) * | 2011-10-26 | 2014-06-24 | Caterpillar Inc. | Continuously variable transmission with nested clutch and planetary output |
-
2012
- 2012-01-23 JP JP2012011085A patent/JP5367853B2/ja not_active Expired - Fee Related
- 2012-12-21 US US14/363,517 patent/US9334628B2/en not_active Expired - Fee Related
- 2012-12-21 WO PCT/JP2012/083213 patent/WO2013111486A1/ja not_active Ceased
- 2012-12-21 DE DE112012005730.9T patent/DE112012005730T5/de not_active Withdrawn
- 2012-12-21 CN CN201280058536.8A patent/CN103958939B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001114084A (ja) * | 1999-10-18 | 2001-04-24 | Toyota Autom Loom Works Ltd | 産業車両のクリープ走行制御装置 |
| JP2002295528A (ja) * | 2001-03-28 | 2002-10-09 | Komatsu Ltd | 車両の速度制御装置 |
| JP2003322252A (ja) * | 2002-04-30 | 2003-11-14 | Komatsu Forklift Co Ltd | 産業車両の走行制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110199142A (zh) * | 2017-06-27 | 2019-09-03 | 株式会社小松制作所 | 作业车辆、及作业车辆的控制方法 |
| US11199260B2 (en) | 2017-06-27 | 2021-12-14 | Komatsu Ltd. | Work vehicle and control method for work vehicle |
| JP2022043418A (ja) * | 2020-09-04 | 2022-03-16 | 鹿島道路株式会社 | 重機の自動制動装置 |
| JP7424947B2 (ja) | 2020-09-04 | 2024-01-30 | 鹿島道路株式会社 | 重機の自動制動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013111486A1 (ja) | 2013-08-01 |
| US9334628B2 (en) | 2016-05-10 |
| US20140345890A1 (en) | 2014-11-27 |
| CN103958939A (zh) | 2014-07-30 |
| JP5367853B2 (ja) | 2013-12-11 |
| DE112012005730T5 (de) | 2014-10-16 |
| CN103958939B (zh) | 2016-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5367853B2 (ja) | モータグレーダ | |
| JP5032705B2 (ja) | エンジン回転数制御装置及びそれを有するモータグレーダ | |
| JP4528238B2 (ja) | 作業車の車速制御構造 | |
| WO2012086684A1 (ja) | ホイールローダ | |
| US8382641B2 (en) | Motor grader | |
| JP5660071B2 (ja) | 作業車両 | |
| JP2009150216A (ja) | 作業車両のエンジンの負荷制御装置 | |
| JP5390749B2 (ja) | モータグレーダ及びモータグレーダのクラッチ制御方法 | |
| JP2013007470A (ja) | 作業車両の変速制御装置 | |
| JP4585417B2 (ja) | トラクタの負荷制御構造 | |
| JP5124528B2 (ja) | 作業車の負荷制御装置 | |
| JP7219573B2 (ja) | 作業車両 | |
| JP2009174536A (ja) | 作業車両のエンジンの負荷制御装置 | |
| JP2009186003A (ja) | 作業車両 | |
| JP2008144628A (ja) | 作業車 | |
| CN113795630A (zh) | 作业车辆以及作业车辆的控制方法 | |
| CN113874266A (zh) | 作业车辆以及作业车辆的控制方法 | |
| JP5210762B2 (ja) | モータグレーダ | |
| JP2002295528A (ja) | 車両の速度制御装置 | |
| JP2005114120A (ja) | 車両の自動変速制御装置 | |
| JP4690840B2 (ja) | 作業車の作動油供給構造 | |
| JP4585495B2 (ja) | 作業車の負荷制御構造 | |
| JP5364196B2 (ja) | 作業車の負荷制御装置 | |
| JP2014029188A (ja) | 作業車両の変速制御装置 | |
| JP2013177927A (ja) | 作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5367853 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |