JP2013152111A - 加速度センサ - Google Patents
加速度センサ Download PDFInfo
- Publication number
- JP2013152111A JP2013152111A JP2012012206A JP2012012206A JP2013152111A JP 2013152111 A JP2013152111 A JP 2013152111A JP 2012012206 A JP2012012206 A JP 2012012206A JP 2012012206 A JP2012012206 A JP 2012012206A JP 2013152111 A JP2013152111 A JP 2013152111A
- Authority
- JP
- Japan
- Prior art keywords
- drive
- substrate
- acceleration
- detection
- electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images































Landscapes
- Micromachines (AREA)
- Pressure Sensors (AREA)
Abstract
【解決手段】 間隔d11(第1の間隔)を隔てて検出フレーム7と対向するように設けられ、電圧が印加されることによって検出フレーム7を駆動する一対の第1駆動電極11a,11bと、間隔d12(第2の間隔)を隔てて検出フレーム7と対向するように設けられ、電圧が印加されることによって検出フレーム7を駆動する一対の第2駆動電極12a,12bと、検出フレーム7の変位を検出する容量−電圧変換回路20(検出手段)と、容量−電圧変換回路20の出力に応じて、第1駆動電極11a,11bまたは第2駆動電極12a,12bに電圧を印加し、検出フレーム7を所定位置に駆動するように制御するサーボ制御回路30(制御手段)とを備え、検出フレーム7を所定位置に駆動するように印加した電圧に基づいて、印加された加速度を検出するものである。
【選択図】 図1
Description
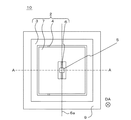
図1ないし4は、実施の形態1に係る加速度センサの構成を示すものであって、図1は構成を示すブロック図、図2は素子構造体を示す上面図、図3は図2から変位部材を除いた上面図、図4は図2のA−A断面図である。なお、以下の各図において、同一符号は同一または相当の構成を示す。
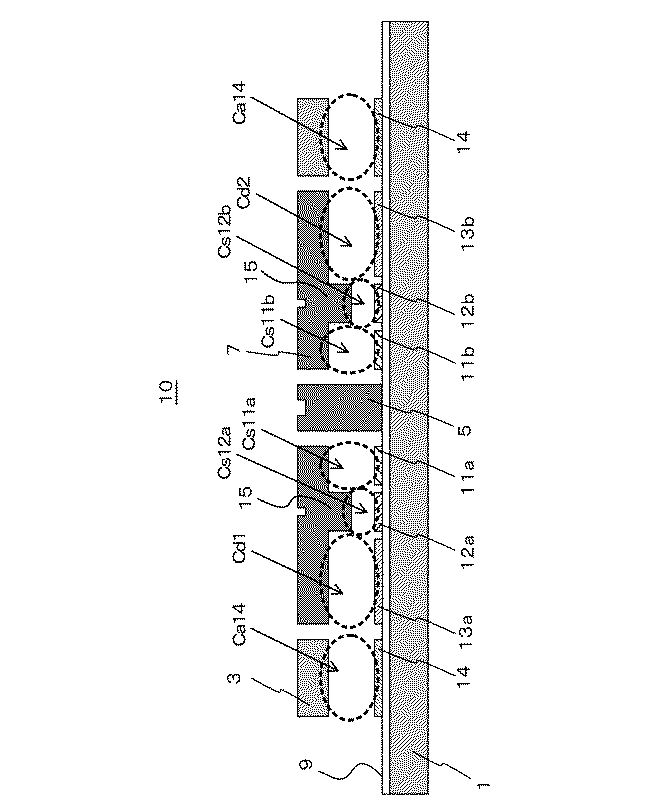
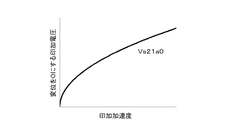
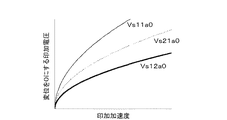
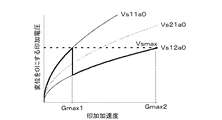
図22ないし24は、実施の形態1の加速度センサに正方向の加速度が印加された状態を示す断面図である。実施の形態1の加速度センサに正方向22の加速度が印加されると、図22に示すように、検出フレーム7は回転変位する。図23に示すように、第1駆動電極11aに印加電圧Vs11aを印加すると、静電力Fs11aを発生させることができる。このとき、変位を0にする印加電圧であるVs11a0を印加すると、図24に示すように、静電力Fs11a0により検出フレーム7は平衡位置に戻る。そして、実施の形態1の加速度センサは、Vs11a0に基づき、印加された加速度を検出する。
図34は、実施の形態2の加速度センサの構成を示すブロック図である。実施の形態1においては、印加電圧制御部31と、スイッチ32と、電源33とでサーボ制御回路30を構成するものを示した。これに対して実施の形態2では、印加電圧制御部31bと、第1駆動電極11a,11bにそれぞれ電圧を印加する電源35a,35b(第1の電源)と、第2駆動電極12a,12bにそれぞれ電圧を印加する電源36a,36b(第2の電源)とでサーボ制御回路30bを構成している。
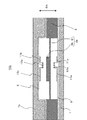
図35は、実施の形態3に係る加速度センサの素子構造体を示す断面図である。実施の形態3に係る加速度センサの素子構造体10bは、図35に示すように、基板1と、基板1と所定間隔を隔てて設けられた基板1bと、基板1,1bに絶縁体9を介して固定されたアンカー5と、アンカー5に支持される変位部材2bとを備えている。変位部材2bは、支持梁51と、慣性質量体3bとを備えている。なお、基板1がこの発明の「第1の基板」に対応し、基板1bがこの発明の「第2の基板」に対応する。
図37および38は実施の形態4に係る加速度センサの構成を示すものであって、図37は素子構造体を示す上面図、図38は図37のB−B断面図を示している。
2、2b、2c 変位部材
3、3b、3c 慣性質量体
4 リンク梁
5 アンカー
6 ねじれ梁
6a ねじれ軸
7 検出フレーム
8 可動電極部
9 絶縁体
10、10b、10c 素子構造体
11a、11b 第1駆動電極
12a、12b 第2駆動電極
13a、13b 検出電極
14 自己診断電極
15、15b 凸部
16a、16b 第3駆動電極
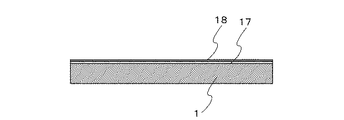
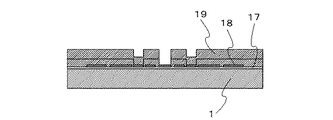
17 絶縁膜
18 導電性ポリシリコン膜
19 PSG膜
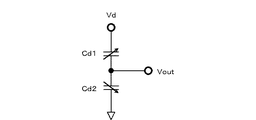
20 容量−電圧変換回路
21a、21b 駆動電極
22 正方向
23 負方向
30、30b サーボ制御回路
31、31b 印加電圧制御部
32 スイッチ
33、35a,35b、36a,36b 電源
40 自己診断回路
41 電源
51、52 支持梁
Claims (12)
- 基板と、
前記基板上に固定されたアンカーと、
前記アンカーに支持され、加速度が印加されることによって変位する慣性質量体と、
前記慣性質量体の変位に応じて変位可能な可動電極と、
第1の間隔を隔てて前記可動電極と対向するように設けられ、電圧が印加されることによって前記可動電極との間に発生する静電力により前記可動電極を駆動する一対の第1駆動電極と、
前記第1の間隔とは異なる第2の間隔を隔てて前記可動電極と対向するように設けられ、電圧が印加されることによって前記可動電極との間に発生する静電力により前記可動電極を駆動する一対の第2駆動電極と、
加速度が印加されることによって生じる前記可動電極の変位を検出する検出手段と、
前記検出手段が検出した前記可動電極の変位に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加し、前記可動電極を所定位置に駆動するように制御する制御手段とを備え、
前記可動電極を所定位置に駆動するように印加した電圧に基づいて、印加された加速度を検出する加速度センサ。 - 前記慣性質量体と前記可動電極とを同一部材で構成したことを特徴とする請求項1の加速度センサ。
- 前記可動電極と対向するように設けられ、前記可動電極との間に静電容量を形成する一対の検出電極を備え、
前記検出手段は、前記可動電極と前記検出電極との間に形成された静電容量の変化に基づいて、前記変位部材の変位を検出することを特徴とする請求項1または2に記載の加速度センサ。 - 基板と、
前記基板上に固定されたアンカーと、
前記アンカーに接続され、ねじれ軸を中心としてねじれるねじれ梁と、
前記ねじれ軸を中心として回転可能に、前記ねじれ梁に支持される検出フレームと、
前記検出フレームの両端において、前記ねじれ梁と所定間隔を隔てた位置に接続されるリンク梁と、
前記リンク梁を介して前記検出フレームに連結され、加速度が印加されることによって前記基板に対して垂直方向に変位する慣性質量体と、
第1の間隔を隔てて前記検出フレームと対向するように前記基板上に設けられ、電圧が印加されることによって前記検出フレームとの間に発生する静電力により前記検出フレームを駆動する一対の第1駆動電極と、
前記第1の間隔とは異なる第2の間隔を隔てて前記検出フレームと対向するように前記基板上に設けられ、電圧が印加されることによって前記検出フレームとの間に発生する静電力により前記検出フレームを駆動する一対の第2駆動電極と、
加速度が印加されることによって生じる前記検出フレームの変位を検出する検出手段と、
前記検出手段が検出した前記検出フレームの変位に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加し、前記検出フレームを所定位置に駆動するように制御する制御手段とを備え、
前記検出フレームを所定位置に駆動するように印加した電圧に基づいて、前記基板に対して垂直方向に印加された加速度を検出する加速度センサ。 - 前記検出フレームと対向するように前記基板上に設けられ、前記検出フレームとの間に静電容量を形成する一対の検出電極を備え、
前記検出手段は、前記検出フレームと前記検出電極との間に形成された静電容量の変化に基づいて、前記検出フレームの変位を検出することを特徴とする請求項4に記載の加速度センサ。 - 第1の基板と、
前記第1の基板と所定間隔を隔てて設けられた第2の基板と、
前記第1の基板および前記第2の基板に固定されたアンカーと、
前記第1の基板と前記第2の基板との間に位置するように、前記アンカーに接続された支持梁に支持され、加速度が印加されることによって前記第1の基板および前記第2の基板に対して垂直方向に変位する慣性質量体と、
第1の間隔を隔てて前記慣性質量体と対向するように前記第1の基板および前記第2の基板上にそれぞれ設けられ、電圧が印加されることによって前記慣性質量体との間に生じる静電力により前記慣性質量体を駆動する一対の第1駆動電極と、
前記第1の間隔とは異なる第2の間隔を隔てて前記慣性質量体と対向するように前記第1の基板および前記第2の基板上にそれぞれ設けられ、電圧が印加されることによって前記慣性質量体との間に生じる静電力により前記慣性質量体を駆動する一対の第2駆動電極と、
加速度が印加されることによって生じる前記慣性質量体の変位を検出する検出手段と、
前記検出手段が検出した前記慣性質量体の変位に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加し、前記慣性質量体を所定位置に駆動するように制御する制御手段とを備え、
前記慣性質量体を所定位置に駆動するように印加した電圧に基づいて、前記第1の基板および前記第2の基板に対して垂直方向に印加された加速度を検出する加速度センサ。 - 前記慣性質量体と対向するように前記第1の基板および前記第2の基板上にそれぞれ設けられ、前記慣性質量体との間に静電容量を形成する一対の検出電極を備え、
前記検出手段は、前記慣性質量体と前記検出電極との間に形成された静電容量の変化に基づいて、前記慣性質量体の変位を検出することを特徴とする請求項6に記載の加速度センサ。 - 基板と、
前記基板上に固定されたアンカーと、
複数の可動電極部を有するとともに、前記アンカーに接続された支持梁に支持され、加速度が印加されることによって前記基板に対して面内方向に変位する慣性質量体と、
第1の間隔を隔てて前記可動電極部と対向するように前記基板上に設けられ、電圧が印加されることによって前記可動電極部との間に生じる静電力により前記慣性質量体を駆動する一対の第1駆動電極と、
前記第1の間隔とは異なる第2の間隔を隔てて前記可動電極部と対向するように前記基板上に設けられ、電圧が印加されることによって前記可動電極部との間に生じる静電力により前記慣性質量体を駆動する一対の第2駆動電極と、
加速度が印加されることによって生じる前記慣性質量体の変位を検出する検出手段と、
前記検出手段が検出した前記慣性質量体の変位に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加し、前記慣性質量体を所定位置に駆動するように制御する制御手段とを備え、
前記慣性質量体を所定位置に駆動するように印加した電圧に基づいて、前記基板に対して面内方向に印加された加速度を検出する加速度センサ。 - 前記可動電極部と対向するように前記基板上に設けられ、前記可動電極部との間に静電容量を形成する一対の検出電極を備え、
前記検出手段は、前記可動電極部と前記検出電極との間に形成された静電容量の変化に基づいて、前記慣性質量体の変位を検出することを特徴とする請求項8に記載の加速度センサ。 - 前記制御手段は、
前記第1駆動電極または前記第2駆動電極に接続される電源と、
前記第1駆動電極および前記第2駆動電極のうち、前記電源に接続される電極を切り替える切替手段と、
前記検出手段の検出値に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加するように、前記電源および前記切替手段を制御する印加電圧制御部とを備えることを特徴とする請求項1ないし9のいずれか一項に記載の加速度センサ。 - 前記制御手段は、
前記第1駆動電極に接続される第1の電源と、
前記第2駆動電極に接続される第2の電源と、
前記検出手段の検出値に応じて、前記第1駆動電極または前記第2駆動電極に電圧を印加するように、前記第1の電源および前記第2の電源を制御する印加電圧制御部とを備えることを特徴とする請求項1ないし9のいずれか一項に記載の加速度センサ。 - 前記制御手段は、前記第1駆動電極および前記第2駆動電極に印加可能な電圧の上限値に基づいて、前記第1駆動電極および前記第2駆動電極のうち電圧を印加する電極を決定することを特徴とする請求項1ないし11のいずれか一項に記載の加速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012206A JP2013152111A (ja) | 2012-01-24 | 2012-01-24 | 加速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012206A JP2013152111A (ja) | 2012-01-24 | 2012-01-24 | 加速度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013152111A true JP2013152111A (ja) | 2013-08-08 |
Family
ID=49048575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012012206A Pending JP2013152111A (ja) | 2012-01-24 | 2012-01-24 | 加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013152111A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015114237A (ja) * | 2013-12-12 | 2015-06-22 | 三菱電機株式会社 | 加速度センサ |
| JP2019104098A (ja) * | 2017-12-14 | 2019-06-27 | 三菱電機株式会社 | 微小電子機械デバイス及びその検査方法、加速度センサ並びに可動ミラー装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0862245A (ja) * | 1994-08-23 | 1996-03-08 | Nippondenso Co Ltd | 静電サーボ式の加速度センサ |
| JP2002340929A (ja) * | 2001-05-18 | 2002-11-27 | Aisin Seiki Co Ltd | 加速度センサ |
| WO2003044539A1 (en) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Acceleration sensor |
| US20040160232A1 (en) * | 2003-02-18 | 2004-08-19 | Honeywell International, Inc. | MEMS enhanced capacitive pick-off and electrostatic rebalance electrode placement |
| JP2004286736A (ja) * | 2003-03-03 | 2004-10-14 | Yamaha Corp | 静電容量型加速度センサ、加速度測定装置、加速度測定方法及びプログラム |
| JP2007274362A (ja) * | 2006-03-31 | 2007-10-18 | Yamaha Corp | 静電型スピーカ |
| US20080098815A1 (en) * | 2006-10-27 | 2008-05-01 | Stmicroelectronics S.R.L. | Microelectromechanical sensor having multiple full-scale and sensitivity values |
| JP2008529001A (ja) * | 2005-01-28 | 2008-07-31 | フリースケール セミコンダクター インコーポレイテッド | 少なくとも2つの間隙寸法と、活性コンデンサ空間の外側に配置された行程ストッパを備えているz軸加速度計 |
| WO2010026843A1 (ja) * | 2008-09-08 | 2010-03-11 | 株式会社日立製作所 | 慣性センサ |
-
2012
- 2012-01-24 JP JP2012012206A patent/JP2013152111A/ja active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0862245A (ja) * | 1994-08-23 | 1996-03-08 | Nippondenso Co Ltd | 静電サーボ式の加速度センサ |
| JP2002340929A (ja) * | 2001-05-18 | 2002-11-27 | Aisin Seiki Co Ltd | 加速度センサ |
| WO2003044539A1 (en) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Acceleration sensor |
| US20040160232A1 (en) * | 2003-02-18 | 2004-08-19 | Honeywell International, Inc. | MEMS enhanced capacitive pick-off and electrostatic rebalance electrode placement |
| JP2004286736A (ja) * | 2003-03-03 | 2004-10-14 | Yamaha Corp | 静電容量型加速度センサ、加速度測定装置、加速度測定方法及びプログラム |
| JP2008529001A (ja) * | 2005-01-28 | 2008-07-31 | フリースケール セミコンダクター インコーポレイテッド | 少なくとも2つの間隙寸法と、活性コンデンサ空間の外側に配置された行程ストッパを備えているz軸加速度計 |
| JP2007274362A (ja) * | 2006-03-31 | 2007-10-18 | Yamaha Corp | 静電型スピーカ |
| US20080098815A1 (en) * | 2006-10-27 | 2008-05-01 | Stmicroelectronics S.R.L. | Microelectromechanical sensor having multiple full-scale and sensitivity values |
| WO2010026843A1 (ja) * | 2008-09-08 | 2010-03-11 | 株式会社日立製作所 | 慣性センサ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015114237A (ja) * | 2013-12-12 | 2015-06-22 | 三菱電機株式会社 | 加速度センサ |
| JP2019104098A (ja) * | 2017-12-14 | 2019-06-27 | 三菱電機株式会社 | 微小電子機械デバイス及びその検査方法、加速度センサ並びに可動ミラー装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20050132805A1 (en) | Capacitance accelerometer having compensation electrode | |
| JP4134853B2 (ja) | 容量式力学量センサ装置 | |
| JP2012163507A (ja) | 加速度センサ | |
| JP5352865B2 (ja) | 加速度センサ | |
| CN104422436B (zh) | 微机械结构元件和用于制造微机械结构元件的方法 | |
| JPWO2008146624A1 (ja) | 加速度センサおよびその製造方法 | |
| US11585830B2 (en) | Micromechanical z-inertial sensor | |
| JP6631652B2 (ja) | フレームを有する微小電気機械構造体 | |
| JP2013152111A (ja) | 加速度センサ | |
| JP4605087B2 (ja) | 静電容量式センサ | |
| JP6167842B2 (ja) | 静電容量型センサ | |
| JP2004502146A (ja) | 電子超小型部品ならびに該電子超小型部品を内蔵したセンサ及びアクチュエータ | |
| US20130169109A1 (en) | Comb electrode structure | |
| JP5800759B2 (ja) | 角加速度検出装置及び検出方法 | |
| JP6080752B2 (ja) | 加速度センサ | |
| US20150123219A1 (en) | Electrode system for a micromechanical component | |
| KR102822278B1 (ko) | 기울어진 플레이트를 포함하는 정전 용량 장치 | |
| EP4632389A1 (en) | Fully symmetrical electrode structures for microelectromechanical devices | |
| JP5199720B2 (ja) | 静電浮上型ジャイロ装置 | |
| JPH11248742A (ja) | 加速度センサ | |
| JP6213133B2 (ja) | Mems構造体、角速度センサ及びバネ定数調整方法 | |
| JP2005127890A (ja) | 自己診断可能な静電容量検出型加速度センサ | |
| JP5869694B2 (ja) | 静電アクチュエーター、可変容量デバイスおよび静電アクチュエーターの駆動方法 | |
| WO2015186727A1 (ja) | Mems構造体 | |
| JP2007263746A (ja) | 静電容量式センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131017 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140319 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140819 |