JP2013152129A - 力検出器、圧力検出装置、電子機器及びロボット - Google Patents
力検出器、圧力検出装置、電子機器及びロボット Download PDFInfo
- Publication number
- JP2013152129A JP2013152129A JP2012012755A JP2012012755A JP2013152129A JP 2013152129 A JP2013152129 A JP 2013152129A JP 2012012755 A JP2012012755 A JP 2012012755A JP 2012012755 A JP2012012755 A JP 2012012755A JP 2013152129 A JP2013152129 A JP 2013152129A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- substrate
- electrode wiring
- force
- external force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 169
- 239000000758 substrate Substances 0.000 claims description 101
- 239000000463 material Substances 0.000 claims description 48
- 230000005484 gravity Effects 0.000 claims description 27
- 238000004364 calculation method Methods 0.000 claims description 13
- 239000000126 substance Substances 0.000 claims description 2
- 238000005259 measurement Methods 0.000 abstract description 16
- 230000035945 sensitivity Effects 0.000 abstract description 14
- 230000001902 propagating effect Effects 0.000 abstract description 6
- 230000004048 modification Effects 0.000 description 19
- 238000012986 modification Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 18
- 238000005452 bending Methods 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 239000011159 matrix material Substances 0.000 description 6
- 239000004973 liquid crystal related substance Substances 0.000 description 5
- 239000003989 dielectric material Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 239000010453 quartz Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 229920002457 flexible plastic Polymers 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- 229920006267 polyester film Polymers 0.000 description 1
- 229920001721 polyimide Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
Images
















Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
- Manipulator (AREA)
Abstract
【課題】計測分解能が高く、計測感度が良い力検出器、これを備えた圧力検出装置、電子機器及びロボットを提供する事。
【解決手段】力検出器2は、第1電極配線211と、第2電極配線212と、形状支持体214と、複数個の検出部としての圧力センサー12とを備える。圧力センサー12は第1電極配線211と第2電極配線212との交点に設けられ、第2電極配線212は第1電極配線211よりも検出面側に配置される。第2電極配線212は圧力センサー12の外の領域で、形状支持体214に沿って屈曲する突出部212aを有している。一つの圧力センサー12に加えられた力が突出部212aによって分散され、第2電極配線212を経由して隣の圧力センサー12に伝播する事を抑制でき、検出面に加えられた力Pを正確に測定する事ができる。
【選択図】図1
【解決手段】力検出器2は、第1電極配線211と、第2電極配線212と、形状支持体214と、複数個の検出部としての圧力センサー12とを備える。圧力センサー12は第1電極配線211と第2電極配線212との交点に設けられ、第2電極配線212は第1電極配線211よりも検出面側に配置される。第2電極配線212は圧力センサー12の外の領域で、形状支持体214に沿って屈曲する突出部212aを有している。一つの圧力センサー12に加えられた力が突出部212aによって分散され、第2電極配線212を経由して隣の圧力センサー12に伝播する事を抑制でき、検出面に加えられた力Pを正確に測定する事ができる。
【選択図】図1
Description
本発明は、力検出器、力検出器を備えた圧力検出装置、電子機器及びロボットに関する。
上記検出装置として、変位可能な接触子と、この接触子を表面に設け、接触子の変位を検出ポイントで検出して出力する感圧素子を備える触覚センサーが知られている(特許文献1)。接触子は感圧素子の表面に三つ以上設けられ、感圧素子の検出ポイントは1つの接触子につき三つ以上設けられている。これにより、接触子に作用する物理量としての荷重を検出可能であると共に、感圧素子の表面において荷重がどの方向に加わっているかというモーメントを検出可能であるとしている。
図17(a)〜(c)は特許文献1に示された感圧素子の構成を示す模式図である。上記特許文献1には、図17(a)〜(c)に示すように、感圧導電シート414と、感圧導電シート414の一方の面側に設けた複数の第1電極411と、感圧導電シート414の他方の面側に第1電極411と交差するように設けられた第2電極412とを有し、第1電極411と第2電極412とが交差する領域が検出ポイント413として機能する感圧素子400の例が示されている。つまり、感圧素子400は、感圧導電シート414を介して第1電極411と第2電極412間の電気抵抗を検出するものである。したがって、触覚センサーは、感圧素子400によって検出された電気抵抗の変化に基づいて荷重を求めている。
図17(a)〜(c)は特許文献1に示された感圧素子の構成を示す模式図である。上記特許文献1には、図17(a)〜(c)に示すように、感圧導電シート414と、感圧導電シート414の一方の面側に設けた複数の第1電極411と、感圧導電シート414の他方の面側に第1電極411と交差するように設けられた第2電極412とを有し、第1電極411と第2電極412とが交差する領域が検出ポイント413として機能する感圧素子400の例が示されている。つまり、感圧素子400は、感圧導電シート414を介して第1電極411と第2電極412間の電気抵抗を検出するものである。したがって、触覚センサーは、感圧素子400によって検出された電気抵抗の変化に基づいて荷重を求めている。
上記特許文献1では、図17(b)に示すように、第2電極412の延在方向(C−C’方向)に交差する方向(R−R’方向)では、例えば隣り合う検出ポイント413の間に荷重Fが加えられたとしても、隣り合う検出ポイント413のさらに外側に延在する第2電極412には荷重Fが伝わり難いので、第2電極412の延在方向に交差する方向における荷重Fの計測分解能は確保できる。しかしながら、図17(c)に示すように、第2電極412の延在方向(C−C’方向)では、加えられた荷重Fが第2電極412の延在方向に伝播して分散する。それゆえに、第2電極412の延在方向に交差する方向に比べて延在方向おける計測分解能や計測感度が低下して、接触子に加えられた荷重や荷重のモーメントを正確に測定できないという課題があった。
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
[適用例1]本適用例に係る力検出器は、第1基板と、可撓性を有する第2基板と、第1基板と第2基板との間に配置された感圧材料とを備え、第1基板は、感圧材料に面する側において互いに間隔を置いて設けられた複数の第1電極配線を含み、第2基板は、感圧材料に面する側に設けられ複数の第1電極配線と交差する第2電極配線を含み、第1電極配線と第2電極配線とが交差する領域が検出部であり、第2電極配線は、隣り合う検出部間において感圧材料側に屈曲または湾曲する突出部を有することを特徴とする。
本適用例によれば、一つの検出部に加えられた力が突出部によって分散されるので、加えられた力が第2電極配線を経由して隣の検出部に伝搬することを抑制できる。従って第2電極配線に沿った方向での計測分解能と検出感度との低下を抑制できる。即ち、検出面に加えられた力を正確に測定する事ができる。換言すると、計測分解能が高く、計測感度も良い力検出器を提供する事ができる。
[適用例2]上記適用例に係わる力検出器において、第2基板は、隣り合う検出部間において第2電極配線を支持すると共に感圧材料側に屈曲または湾曲させる形状支持体を有することを特徴とする。
本適用例によれば、形状支持体に沿って第2電極配線を形成でき、第2電極配線の突出部を所望の形状に形成することが可能となる。
[適用例3]上記適用例に係わる力検出器において、第2電極配線は、互いに間隔を置いて複数設けられ、形状支持体は、隣り合う第2電極配線間において互いに離間して配置されていることを特徴とする。
本適用例によれば、形状支持体すなわち突出部が互いに離間して配置されているため、一つの検出部に加えられた力が複数の突出部により分散されるので、加えられた力が第2電極配線を経由して隣の検出部に伝搬することをより抑制できる。
[適用例4]上記適用例に係わる力検出器において、第2電極配線は、互いに間隔を置いて複数設けられ、形状支持体は、第2基板よりも弾性係数が大きく、隣り合う第1電極配線間において複数の第2電極配線に亘って配置されていることを特徴とする。
本適用例によれば、形状支持体の弾性係数が第2基板の弾性係数よりも大きいため、一つの検出部に加えられた力が形状支持体すなわち突出部を経由して隣の検出部に伝搬することを抑制できる。従って第2電極配線に沿った方向での計測分解能と検出感度との低下をより抑制できる。また形状支持体を、隣り合う第1電極配線間において複数の第2電極配線に亘って配置するため、形状支持体の形成を容易にする事ができる。
[適用例5]上記適用例に係わる力検出器において、形状支持体は、第2基板に一体成形されていることを特徴とする。
本適用例によれば、形状支持体が第2基板に一体形成されているために、形状支持体の強度および耐久性を向上させることができる。また、高い生産効率を得ることができる。
[適用例6]上記適用例に係わる力検出器において、第2電極配線と感圧材料との間に設けられ、少なくとも第2電極配線の突出部を覆う絶縁層を備えることを特徴とする。
本適用例によれば、第2電極配線の突出部が絶縁層で覆われているため、第2電極配線の突出部と第1電極配線間での力検出を防止することができる。すなわち、第1電極配線と第2電極配線とが交差する領域のみを検出部とすることができ、より正確な力検出が可能となる。
[適用例7]上記適用例に係わる力検出器において、感圧材料が感圧導電性弾性体であることを特徴とする。
本適用例によれば、一つの検出部に加えられた力が第2電極配線を経由して隣の検出部に伝搬することを抑制できる。従って、ある検出部に作用した外力が、当該検出部の隣の検出部に配置された、感圧導電性弾性体からなる抵抗方式の圧力センサーによって誤検出されることを抑制できる。
[適用例8]上記適用例に係わる力検出器において、感圧材料が弾性を有する誘電体物質であることを特徴とする。
本適用例によれば、一つの検出部に加えられた力が第2電極配線を経由して隣の検出部に伝搬することを抑制できる。従って、ある検出部に作用した外力が、当該検出部の隣の検出部に配置された、誘電体物質からなる誘電方式の圧力センサーによって誤検出されることを抑制できる。
[適用例9]上記適用例に係わる力検出器において、感圧材料が感圧スイッチであることを特徴とする。
本適用例によれば、一つの検出部に加えられた力が第2電極配線を経由して隣の検出部に伝搬することを抑制できる。従って、ある検出部に作用した外力が、当該検出部の隣の検出部に配置された、圧力スイッチからなる圧力センサーによって誤検出されることを抑制できる。
[適用例10]本適用例に係わる圧力検出装置は、外力の大きさと方向とを検出する圧力検出装置であって、上記適用例に記載の力検出器と、一方の面側に弾性体突起を有する第3基板とを備え、第3基板は弾性体突起の先端部が第2基板の感圧材料に面する側に対して反対側の表面に接するように力検出器に対向配置されていることを特徴とする。
本適用例によれば、弾性体突起の先端部が第2基板に当接した状態で滑り方向(圧力検出装置に平行な方向)に変形する事が可能であるので、特許文献1の触覚センサーに比べて、外力の大きさと方向との検出精度を高める事ができる。第3基板の表面に外力が付加されると、弾性体突起は先端部が第2基板に当接した状態で圧縮変形する。この時、面内の所定の方向の滑り力成分がある場合、弾性体突起の変形には偏りが生じる。即ち、弾性体突起の重心は所定方向(滑り方向)に移動する。すると、力検出器における複数の圧力センサーのうち弾性体突起の重心が移動した部分と重なる割合が相対的に大きくなる。つまり、各圧力センサーで異なる値の圧力値が検出される。具体的には、弾性体突起の重心と重なる位置の圧力センサーでは相対的に大きい圧力値が検出され、弾性体突起の重心と重ならない位置の圧力センサーでは相対的に小さい圧力値が検出される事となる。よって、演算装置により、各圧力センサーで検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と大きさを求める事ができる。又、力検出器の感度と分解能とが優れているので、外力の大きさと方向とを高い精度で検出する圧力検出装置を提供する事ができる。
[適用例11]上記適用例に係わる圧力検出装置において、第1電極配線と第2電極配線とが交差する領域が検出部であり、第1基板には基準点が定められると共に、検出部は基準点の周りに複数個設けられ、第3基板は、弾性体突起の重心が基準点と重なると共に、弾性体突起の先端部が基準点に接するように力検出器に対向配置されていることを特徴とする。
本適用例によれば、第3基板の表面に外力が付加されると、弾性体突起は先端部が第2基板に当接した状態で圧縮変形する。この時、面内の所定の方向の滑り力成分がある場合、弾性体突起の変形には偏りが生じる。即ち、弾性体突起の重心は基準点からずれて所定方向(滑り方向)に移動する。すると、基準点の周りに設けられた複数の検出部すなわち複数の圧力センサーのうち弾性体突起の重心が移動した部分と重なる割合が相対的に大きくなる。つまり、各圧力センサーで異なる値の圧力値が検出される。具体的には、弾性体突起の重心と重なる位置の圧力センサーでは相対的に大きい圧力値が検出され、弾性体突起の重心と重ならない位置の圧力センサーでは相対的に小さい圧力値が検出される事となる。よって、演算装置により、各圧力センサーで検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と大きさを求める事ができる。又、力検出器の感度と分解能とが優れているので、外力の大きさと方向とを高い精度で検出する圧力検出装置を提供する事ができる。
[適用例12]上記適用例に係わる圧力検出装置において、外力によって弾性体突起が弾性変形することにより複数の検出部で検出された圧力値のうち任意に組み合わされた検出部でそれぞれ検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と外力の大きさを演算する演算装置を備えてもよい。
[適用例13]本適用例に係わる電子機器は、上記適用例に係わる圧力検出装置を備えることを特徴とする。
この構成によれば、上述した圧力検出装置を備えているので、外力の方向と大きさを高い精度で検出する事が可能な電子機器を提供する事ができる。
[適用例14]本適用例に係わるロボットは、上記適用例に係わる圧力検出装置を備えることを特徴とする。
この構成によれば、上述した圧力検出装置を備えているので、外力の方向と大きさを高い精度で検出する事が可能なロボットを提供する事ができる。
以下、本発明を具体化した実施形態について図面に従って説明する。なお、使用する図面は、説明する部分が認識可能な状態となるように、適宜拡大または縮小して表示している。尚、以下の説明においては、図1中に示されたXYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材について説明する。XYZ直交座標系は、X軸及びY軸が第1基板10に対して平行な方向に設定され、XY平面(z=0)を検出面(図1(b)の第2基板20の表面側)と称す。又、Z軸が第1基板10に対して直交する方向(検出面の法線方向)に設定されている。
なお、以下の形態において、例えば「基板上に」と記載された場合、基板の上に接するように配置される場合、または基板の上に他の構成物を介して配置される場合、または基板の上に一部が接するように配置され、一部が他の構成物を介して配置される場合を表すものとする。
(実施形態1)
<力検出器>
本実施形態の力検出器について、図1を参照して説明する。
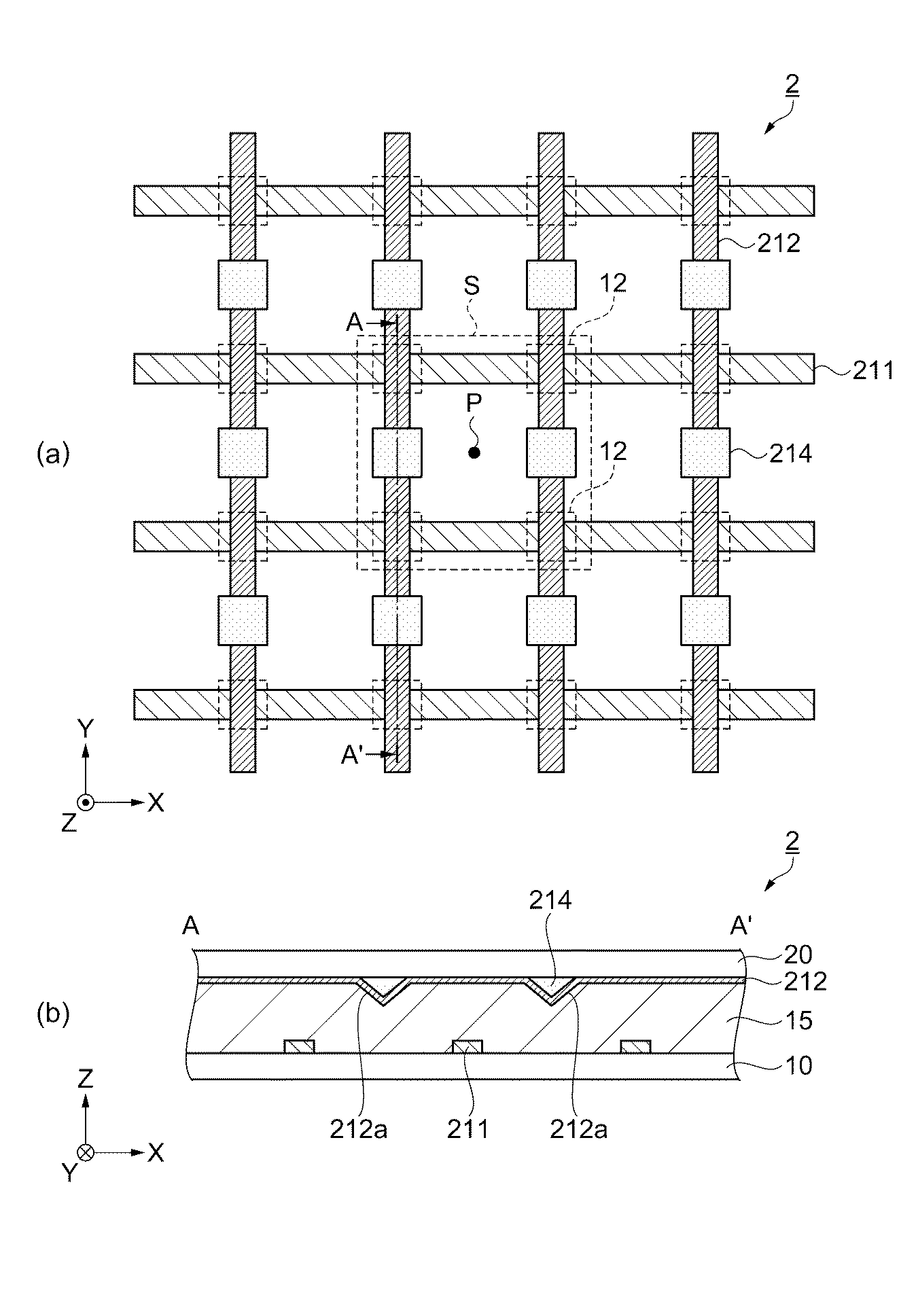
図1は、実施形態1に係る力検出器の概略構成を示す図であり、(a)は平面図で、(b)は(a)のA−A’における断面図である。
本実施形態の力検出器2は図1(b)に示される様に、第1基板10と第2基板20と感圧材料15とを備える。本実施形態で、感圧材料15は感圧導電性弾性体である。感圧材料15は第1基板10の表面と第2基板20の裏面とで挟持され、第2基板20の表面側が検出面である。力検出器2はこの検出面に加えられた力を検出する。尚、第1基板10も第2基板20も一方の面を表面と称し、その反対の他方の面を裏面と称している。本明細書では、Z軸の正の方向(図1(b)の上向き)に面する方を表面と称し、Z軸の負の方向(図1(b)の下向き)に面する方を裏面と称する。
<力検出器>
本実施形態の力検出器について、図1を参照して説明する。
図1は、実施形態1に係る力検出器の概略構成を示す図であり、(a)は平面図で、(b)は(a)のA−A’における断面図である。
本実施形態の力検出器2は図1(b)に示される様に、第1基板10と第2基板20と感圧材料15とを備える。本実施形態で、感圧材料15は感圧導電性弾性体である。感圧材料15は第1基板10の表面と第2基板20の裏面とで挟持され、第2基板20の表面側が検出面である。力検出器2はこの検出面に加えられた力を検出する。尚、第1基板10も第2基板20も一方の面を表面と称し、その反対の他方の面を裏面と称している。本明細書では、Z軸の正の方向(図1(b)の上向き)に面する方を表面と称し、Z軸の負の方向(図1(b)の下向き)に面する方を裏面と称する。
力検出器2は更に第1電極配線211と第2電極配線212とを備え、第1電極配線211は第1基板10の表面に形成され、第2電極配線212は第2基板20の裏面に形成されている。従って、第1電極配線211と第2電極配線212との間に感圧材料15としての感圧導電性弾性体が備えられている。力検出器2の検出面が第2基板20の表面側なので、断面視にて、第2電極配線212は第1電極配線211よりも検出面側に配置されている事になる。一方、平面視においては、図1(a)に示される様に、第1電極配線211と第2電極配線212とは、互いに交差される様に配置され、第1電極配線211と第2電極配線212とが交差する領域が検出部であって、検出部には圧力センサー12が設けられる。即ち、力検出器2は感圧抵抗方式の複数の圧力センサー12を具備して構成されている。
さらに、第2基板20の裏面には感圧材料15側に突出する形状支持体214を有しており、第2電極配線212は形状支持体214の形状に沿って形成される。即ち、第2電極配線212に沿って隣り合う圧力センサー12の間で、第2電極配線212は感圧材料15側に屈曲する突出部212aを有している。断面の形状が三角形の形状支持体214は、隣り合う第2電極配線212間において互いに離間して配置されている。
第1基板10は、例えばガラスや石英及びプラスチック等の材料で構成された矩形板であり、第1基板10の大きさ(平面視のサイズ)は、例えば縦20mm×横20mm程度になっている。又、第2基板20は可撓性を有する例えばポリイミドフィルムやポリエステルフィルムなどのプラスチックフィルムを用いて構成されている。尚、感圧材料15は、誘電体物質でも構わず、第1電極配線211と第2電極配線212との間に誘電体物質を備えた静電容量方式の圧力センサー12を以て力検出器2を構成してもよい。また、感圧材料15は、加えられた圧力によって、電気的なスイッチングが生ずる感圧スイッチでもよい。
形状支持体214は、第2基板20の弾性係数よりも大きい弾性係数を有する絶縁性の部材で構成することが好ましいが、上述した第2基板20を構成する部材と同じ部材を用いてもよい。これによれば、第2基板20と形状支持体214とを一体成形することもできる。
<圧力検出装置>
次に、上述の力検出器2を用いた圧力検出装置について図2を参照して説明する。図2は、実施形態1に係る圧力検出装置の概略構成を示す分解斜視図である。図2において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の圧力センサー12が検出する単位検出領域を示している。尚、図1(a)には、図2に対応させて、単位検出領域Sと基準点Pとを描いてある。
次に、上述の力検出器2を用いた圧力検出装置について図2を参照して説明する。図2は、実施形態1に係る圧力検出装置の概略構成を示す分解斜視図である。図2において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の圧力センサー12が検出する単位検出領域を示している。尚、図1(a)には、図2に対応させて、単位検出領域Sと基準点Pとを描いてある。
本実施形態の圧力検出装置1は、基準点Pに加えられた外力の方向と大きさを検出する圧力センサー方式のタッチパッドであり、例えばノートパソコン等の電子機器においてマウスの代わりのポインティングデバイスとして用いられるものである。あるいは、ロボットハンドの指に取り付けられ、触覚センサーとして用いられるものである。尚、「基準点」とは、滑り力が作用していない場合に弾性体突起32の中心が位置するポイントである。
図2に示す様に、圧力検出装置1は、基準点Pの周りに複数配置された圧力センサー12、を有する力検出器2と、基準点Pに重なる位置に重心が位置すると共に外力によって先端部が力検出器2に当接した状態で弾性変形する弾性体突起32が形成された第3基板30と、を備えている。
圧力検出装置1は、外力によって弾性体突起32が弾性変形する事により複数の圧力センサー12で検出された圧力値のうち任意に組み合わされた各圧力センサー12で検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と大きさを演算する演算装置(図示略)を備えている。
複数の圧力センサー12は、基準点Pに対して点対称に配置されている。例えば、複数の圧力センサー12は、互いに直交する二方向(X方向及びY方向)に行列状に配置されている。これにより、基準点Pと各圧力センサー12との間の距離が互いに等しくなるので、弾性体突起32の変形と各圧力センサー12で検出される圧力値との関係が互いに等しくなる。よって、各圧力センサー12の圧力値のうち任意に組み合わされた各圧力センサー12で検出された圧力値の差分を演算する事が容易となる。尚、圧力値の差分の演算方法については後述する。
複数の圧力センサー12は、単位検出領域S当たり縦2行横2列に計4つ配置されている。4つの圧力センサー12の中心(単位検出領域Sの中心)が基準点Pとなっている。例えば、単位検出領域Sの大きさ(平面視のサイズ)は、縦4mm×横4mm程度になっている。また、4つの圧力センサー12の各面積がほぼ等しくなっている。圧力センサー12は、接触面に外力が作用した時に加わる圧力を抵抗の変化として検出して電気信号に変換する。但し、圧力センサー12の方式については特に限定される事なく、この他に例えば、前述した静電容量方式などを用いる事ができる。
第3基板30は、矩形板状の第3基板本体31と、第3基板本体31に配置された複数の弾性体突起32と、を具備して構成されている。第3基板本体31は、外力を受ける部分である。第3基板本体31は、例えばガラス、石英及びプラスチックなどの材料で構成する事もできるし、発泡ウレタン樹脂、シリコーン樹脂等の樹脂材料で構成する事もできる。本実施形態では、第3基板本体31及び弾性体突起32の形成材料として樹脂材料を用い、第3基板本体31及び弾性体突起32を金型で一体形成している。
複数の弾性体突起32は、第3基板本体31上においてX方向及びY方向に行列状に配置されている。弾性体突起32の先端部は、球面の錘状となっており、力検出器2に当接している。弾性体突起32の重心は、初期的に基準点Pと重なる位置に配置されている。また、複数の弾性体突起32は、互いに離間して配置されている。この為、弾性体突起32が弾性変形した時の第3基板本体31の面内に平行な方向の変形量を許容する事ができる。
弾性体突起32のサイズは任意に設定する事ができる。ここでは、弾性体突起32の基部の径(弾性体突起32が第3基板本体31に接する部分の直径)は5mm程度になっている。弾性体突起32の高さ(弾性体突起32のZ方向の距離)は5mm程度になっている。隣り合う弾性体突起32の離間間隔は2.5mm程度になっている。弾性体突起32のデュロメーター硬さ(タイプA、ISO7619準拠のデュロメーターによる硬さ測定値)は30程度になっている。
次に、基準点Pに作用する外力の方向と大きさを検出する方法について、図3及び図4を参照して説明する。図3(a)〜(c)は、実施形態1に係る圧力検出装置の構造変化を示す断面図である。図4(a)〜(c)は、図3(a)〜(c)に対応した、実施形態1に係る圧力検出装置の圧力値の変化を示す平面図である。尚、図3(a)及び図4(a)は第3基板30の表面に外力が付加される前の状態(外力の作用がないとき)を示している。図3(b)及び図4(b)は第3基板30の表面に垂直方向(滑り力がない状態)の外力が付加された状態を示している。図3(c)及び図4(c)は第3基板30の表面に斜め方向(滑り力がある状態)の外力が付加された状態を示している。また、図4(a)〜(c)において、符号Gは弾性体突起32の重心(圧力中心)を示している。
図3(a)及び図4(a)に示す様に、圧力検出装置1の表面に外力が付加される前においては、弾性体突起32は変形しない。これにより、力検出器2と第3基板30との間の距離は一定に保たれる。この時、弾性体突起32の重心Gは基準点Pと重なる位置に配置されている。この時の各圧力センサー12の圧力値は例えばメモリー(図示省略)に記憶されている。メモリーに記憶された各圧力センサー12の圧力値を基準として外力の作用する方向や大きさが求められる。
図3(b)及び図4(b)に示す様に、圧力検出装置1の表面に垂直方向の外力が付加された時には、弾性体突起32は先端部が力検出器2に配置された複数の圧力センサー12に当接した状態でZ方向に圧縮変形する。これにより、第2基板20が−Z方向に撓み、力検出器2と第3基板30との間の距離が外力の作用がない時に比べて小さくなる。この時の圧力センサー12の圧力値は、外力の作用がない時に比べて大きくなる。また、その変化量は各圧力センサー12とも略同じ値となる。
図3(c)及び図4(c)に示す様に、圧力検出装置1の表面に斜め方向の外力が付加された時には、弾性体突起32は先端部が力検出器2に配置された複数の圧力センサー12に当接した状態で斜めに傾いて圧縮変形する。これにより、第2基板20が−Z方向に撓み、力検出器2と第3基板30との間の距離が外力の作用がない時に比べて小さくなる。この時、弾性体突起32の重心Gは基準点Pから+X方向及び+Y方向にずれる。この場合、弾性体突起32の先端部と4つの圧力センサー12とがそれぞれ重なる面積が変化する。具体的には、弾性体突起32の先端部と、4つの圧力センサー12のうち−X方向及び−Y方向に配置された圧力センサー12と重なる面積よりも+X方向及び+Y方向に配置された圧力センサー12と重なる面積のほうが大きくなる。
弾性体突起32は、斜め方向の外力により変形に偏りが生じる。即ち、弾性体突起32の重心Gは基準点Pからずれて滑り方向(X方向及びY方向)に移動する。すると、各圧力センサー12で異なる値の圧力値が検出される。具体的には、弾性体突起32の重心Gと重なる位置の圧力センサー12では相対的に大きい圧力値が検出され、弾性体突起32の重心Gと重ならない位置の圧力センサー12では相対的に小さい圧力値が検出される事となる。そして、後述する差分の演算方法に基づいて外力が加えられた方向と大きさが求められる。
図5は、実施形態1に係るセンシング領域の座標系を示す図である。図6は、実施形態1に係る圧力センサーによる垂直方向の圧力分布を示す図である。図7は、実施形態1に係る圧力センサーによる滑り方向の計算例を示す図である。
図5に示す様に、複数の圧力センサーS1(12)〜S4(12)は、単位検出領域S当たり縦2行横2列に計4つ配置されている。ここで、各圧力センサーS1(12)〜S4(12)が検出する圧力値(検出値)をそれぞれPS1、PS2、PS3、PS4とし、各圧力センサー12の面積をAとすると、外力のX方向成分Fx(外力の面内方向成分のうちX方向に作用する分力)は以下の式(1)で表される。
また、外力のY方向成分Fy(外力の面内方向成分のうちY方向に作用する分力)は以下の式(2)で表される。
尚、式(1)及び式(2)のfは圧力検出装置1に固有な比例定数で力の単位を有する。また、外力のZ方向成分Fz(外力の垂直方向成分)は以下の式(3)で表される。
本実施形態では、外力の成分を検出する際に法線成分Fzに関しては式(3)を用い、滑り力に関しては式(1)及び式(2)を用いる。滑り力に関しては、次の手順を踏む。
まず、検出面上で第1軸(例えばX軸)と第2軸(例えばY軸)とを定める。第1軸に沿った滑り力の成分を検出するには、基準点Pより第1軸の正の方向に位置する圧力センサー12(例えば圧力センサーS2(12)と圧力センサーS4(12))で検出された圧力値の和から、第1軸の負の方向に位置する圧力センサー12(例えば圧力センサーS1(12)と圧力センサーS3(12))で検出された圧力値の和を差し引き(1軸差分と称する)、この数値(1軸差分)を用いて所定の演算を行って求める。同様に、第2軸に沿った滑り力の成分を検出するには、基準点Pより第2軸の正の方向に位置する圧力センサー12(例えば圧力センサーS1(12)と圧力センサーS2(12))で検出された圧力値の和から、第2軸の負の方向に位置する圧力センサー12(例えば圧力センサーS3(12)と圧力センサーS4(12))で検出された圧力値の和を差し引き(2軸差分と称する)、この数値(2軸差分)を用いて所定の演算を行って求める。所定の演算の一例としては、先の数値(1軸差分や2軸差分)を、総ての圧力センサー12(例えば圧力センサーS1(12)〜S4(12))で検出された圧力値の総和にて除し、圧力検出装置1に固有な比例定数fを乗ずる。
まず、検出面上で第1軸(例えばX軸)と第2軸(例えばY軸)とを定める。第1軸に沿った滑り力の成分を検出するには、基準点Pより第1軸の正の方向に位置する圧力センサー12(例えば圧力センサーS2(12)と圧力センサーS4(12))で検出された圧力値の和から、第1軸の負の方向に位置する圧力センサー12(例えば圧力センサーS1(12)と圧力センサーS3(12))で検出された圧力値の和を差し引き(1軸差分と称する)、この数値(1軸差分)を用いて所定の演算を行って求める。同様に、第2軸に沿った滑り力の成分を検出するには、基準点Pより第2軸の正の方向に位置する圧力センサー12(例えば圧力センサーS1(12)と圧力センサーS2(12))で検出された圧力値の和から、第2軸の負の方向に位置する圧力センサー12(例えば圧力センサーS3(12)と圧力センサーS4(12))で検出された圧力値の和を差し引き(2軸差分と称する)、この数値(2軸差分)を用いて所定の演算を行って求める。所定の演算の一例としては、先の数値(1軸差分や2軸差分)を、総ての圧力センサー12(例えば圧力センサーS1(12)〜S4(12))で検出された圧力値の総和にて除し、圧力検出装置1に固有な比例定数fを乗ずる。
式(1)に示す様に、外力のX方向成分Fxにおいては、4つの圧力センサーS1(12)〜S4(12)で検出された圧力値のうち+X方向に配置された圧力センサーS2(12)及び圧力センサーS4(12)で検出された値が組み合わされると共に、−X方向に配置された圧力センサーS1(12)及び圧力センサーS3(12)で検出された値が組み合わされる。この様に、+X方向に配置された圧力センサーS2(12)及び圧力センサーS4(12)の組み合わせによる圧力値と−X方向に配置された圧力センサーS1(12)及び圧力センサーS3(12)の組み合わせによる圧力値との差分に基づいて外力のX方向成分が求められる。
式(2)に示す様に、外力のY方向成分Fyにおいては、4つの圧力センサーS1(12)〜S4(12)で検出された圧力値のうち+Y方向に配置された圧力センサーS1(12)及び圧力センサーS2(12)で検出された値が組み合わされると共に、−Y方向に配置された圧力センサーS3(12)及び圧力センサーS4(12)で検出された値が組み合わされる。この様に、+Y方向に配置された圧力センサーS1(12)及び圧力センサーS2(12)の組み合わせによる圧力値と−Y方向に配置された圧力センサーS3(12)及び圧力センサーS4(12)の組み合わせによる圧力値との差分に基づいて外力のY方向成分が求められる。
式(3)に示す様に、外力のZ方向成分Fzにおいては、4つの圧力センサーS1(12)〜S4(12)の圧力値を足し合わせた合力で求められる。但し、外力のZ方向成分Fzは、外力のX方向成分Fx及び外力のY方向成分Fy(分力)に比べて検出値が大きく検出される傾向がある。例えば、弾性体突起32の材質として硬いものを用いたり、先端部の形状を先鋭にしたりすると、外力のZ方向成分Fzの検出感度が高くなる。しかしながら、弾性体突起32の材質として硬いものを用いると弾性体突起32が変形しにくくなり外力の面内方向の検出値が小さくなってしまう。また、弾性体突起32の先端部の形状を先鋭にすると接触面を指で触った時のタッチ感に強い感度(違和感)を与える場合がある。この為、外力のZ方向成分Fzの検出値を、外力のX方向成分Fxの検出値及び外力のY方向成分Fyの検出値と揃えるには、弾性体突起32の材質や形状によって決定される補正係数で検出値を適宜補正する必要がある。
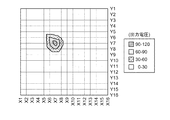
図6は、圧力検出装置1を15行15列の行列状(合計225個)に並べて、タッチバッドとした例で、各圧力検出装置1は、単位検出領域Sに圧力センサーS1(12)〜S4(12)を縦2行横2列の合計4個配置している。図6では、タッチパッドの検出面の中央部より左上寄りの位置を指で斜めに押している。この時、外力の垂直方向(Z方向)の圧力は、外力が作用した部分の中心部が最も大きくなっている(圧力センサー12の出力電圧が90mV〜120mV程度)。また、外力の垂直方向(Z方向)の圧力は、中心部に次いでその周辺部(圧力センサー12の出力電圧が60mV〜90mV程度)、最外周部(圧力センサー12の出力電圧が30mV〜60mV程度)の順に小さくなっている。また、指で押されていない領域は、圧力センサー12の出力電圧が0mV〜30mV程度となっている。
図6に示すタッチパッドの検出面の中央部より左上寄りの位置を指で斜めに押した場合に外力の面内方向成分(滑り方向)の算出方法を考える。図7は、外力を算出する一例を示している。図7の例では、指の押圧力(外力)は、縦15行×横15列に配置された圧力検出装置1の内の縦3行×横3列に配置された部分に作用している。外力の垂直方向の圧力は、図6と同様に、外力が作用した3行3列の中心部がもっとも大きくなっている(110mV)。各圧力検出装置1は、それぞれ4つの圧力センサーS1(12)〜S4(12)を有しており、4つの圧力センサーS1(12)〜S4(12)からの出力の和が外力の法線成分となる(上述の式(3))。例えば、先の中央部の圧力検出装置1では各圧力センサー12からの出力の和は54mV+28mV+18mV+10mV=110mVとなっている。
一方、各圧力センサーS1(12)〜S4(12)で検出された圧力値のうち任意に組み合わされた各圧力センサーで検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向(滑り力の方向)が演算される。つまり、各圧力検出装置1にて、上述した式(1)及び式(2)に基づいて外力のX方向成分Fx及び外力のY方向成分Fyが算出される。例えば、中心部の圧力検出装置1ではFx=(28+10−54−18)/110f=−0.31f、Fy=(54+28−18−10)/110f=0.49fとなっている。従ってtanθ=−0.49/0.31=−1.58となり、滑り力の方向はθ=122°である。この様に9個の圧力検出装置1にて検出された滑り力の方向の平均を取ると、+X方向を基準として反時計回りに約123°の方向に外力が作用している事が分かる。尚、外力の作用する方向の算出にあっては、ここで行われた様に複数の圧力検出装置1から算出された結果の平均値で求める方法の他に、例えば、複数の圧力検出装置1から算出された結果の最大値を採用する方法や、所定の閾値よりも大きい検出値を採用する方法等を用いる事ができる。
本実施形態の力検出器2によれば、隣り合う圧力センサー12間の第2電極配線212に突出部212aが設けられているので、一つの圧力センサー12に加えられた力が第2電極配線212を経由して隣の圧力センサー12に伝播する事を抑制できる。従って、第2電極配線212に沿った方向での計測分解能と検出感度との低下を抑制できる。即ち、検出面に加えられた力を正確に測定する事ができる。換言すると、計測分解能が高く、計測感度も良い力検出器2を提供する事ができる。又、第1電極配線211が真っ直ぐな帯状となるので、製造が容易で有る上に、複数個の圧力センサー12を行列状に配置できる。
本実施形態の圧力検出装置1によれば、弾性体突起32の先端部が力検出器2(複数の圧力センサー12)に当接した状態で滑り方向(圧力センサー12表面に平行な方向)に変形する事が可能であるので、特許文献1の触覚センサーに比べて、外力の方向と大きさの検出精度を高める事ができる。圧力検出装置1の表面に外力が付加されると、弾性体突起32は先端部が力検出器2に配置された複数の圧力センサー12に当接した状態で圧縮変形する。この時、面内の所定の方向の滑り力成分がある場合、弾性体突起32の変形には偏りが生じる。即ち、弾性体突起32の重心は基準点Pからずれて所定方向(滑り方向)に移動する。すると、複数の圧力センサー12のうち弾性体突起32の重心が移動した部分と重なる割合が相対的に大きくなる。つまり、各圧力センサーS1(12)〜S4(12)で異なる値の圧力値が検出される。具体的には、弾性体突起32の重心と重なる位置の圧力センサー12では相対的に大きい圧力値が検出され、弾性体突起32の重心と重ならない位置の圧力センサー12では相対的に小さい圧力値が検出される事となる。よって、演算装置により、各圧力センサーS1(12)〜S4(12)で検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と大きさを求める事ができる。従って、外力の方向と大きさを高い精度で検出する事が可能な圧力検出装置1を提供する事ができる。
本実施形態によれば、複数の圧力センサー12が基準点Pに対して点対称に配置されているので、基準点Pと各圧力センサー12との間の距離が互いに等しくなる。この為、弾性体突起32の変形量と各圧力センサーS1(12)〜S4(12)で検出される圧力値の関係が互いに等しくなる。例えば、複数の圧力センサー12が基準点Pから互いに異なる距離に配置される場合、弾性体突起32の変形量が同じであっても、各圧力センサー12で検出された圧力値は互いに異なる事となる。この為、検出値の差分を演算する際に各圧力センサーS1(12)〜S4(12)の配置位置に応じた補正係数が必要となる。しかしながら、本実施形態によれば、弾性体突起32の変形量と各圧力センサーS1(12)〜S4(12)が検出する圧力値との関係が互いに等しくなるので、前記補正係数は不要となる。従って、各圧力センサーS1(12)〜S4(12)の圧力値の差分から外力の方向と大きさを演算する事が容易となり、外力を効率よく検出する事ができる。
本実施形態によれば、複数の圧力センサー12が互いに直交する二方向に行列状に配置されているので、各圧力センサーS1(12)〜S4(12)で検出された圧力値のうち任意に組み合わされた各圧力センサー12で検出された圧力値の差分から外力の方向と大きさを演算する事が容易となる。例えば、面内方向成分のうちX方向成分を演算する場合、複数の圧力センサー12が複数の方向にランダムに配置されている場合に比べて、相対的に+X方向に配置された圧力センサーS2(12)及び圧力センサーS4(12)の組み合わせと相対的に−X方向に配置された圧力センサーS1(12)及び圧力センサーS3(12)の組み合わせとを区分けして選出しやすくなる。従って、外力を効率よく検出する事ができる。
本実施形態によれば、第3基板本体31には、複数の弾性体突起32が互いに離間して配置されているので、弾性体突起32が弾性変形した時の第3基板本体31の面内に平行な方向の変形量を許容する事ができる。例えば、一方の弾性体突起32が変形した時に他方の弾性体突起32に変形の影響を及ぼす事を抑制する事ができる。この為、複数の弾性体突起32が互いに接触して配置されている場合に比べて、外力を正確に各圧力センサーS1(12)〜S4(12)に伝達する事ができる。従って、外力の方向と大きさを高い精度で検出する事ができる。
尚、本実施形態においては、圧力センサー12が単位検出領域S当たり縦2行横2列に計4つ配置されている例を挙げて説明したが、これに限らない。圧力センサー12は、単位検出領域S当たり3つ以上配置されていればよい。
(実施形態2)
<他の圧力検出装置>
次に、実施形態2の圧力検出装置について図8〜図11を参照して説明する。
図8は、図2に対応した、本発明の実施形態2に係る圧力検出装置の概略構成を示す分解斜視図である。図8において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の圧力センサー112が検出する単位検出領域を示している。本実施形態の圧力検出装置4は、複数の圧力センサー112が互いに直交する二方向に少なくとも縦4行横4列に配置されている点で、上述の実施形態1で説明した圧力検出装置1と異なる。図8において、図2と同様の構成には同一の符号を付し、詳細な説明は省略する。尚、図8においては、便宜上、複数の圧力センサー112が単位検出領域S当たり縦4行横4列に配置されているが、実際には図10及び図11に示す様に複数の圧力センサー112が単位検出領域S当たり縦4行横4列以上に配置されていても良い。
<他の圧力検出装置>
次に、実施形態2の圧力検出装置について図8〜図11を参照して説明する。
図8は、図2に対応した、本発明の実施形態2に係る圧力検出装置の概略構成を示す分解斜視図である。図8において、符号Pは基準点、符号Sは1つの弾性体突起32に対応して配置された複数の圧力センサー112が検出する単位検出領域を示している。本実施形態の圧力検出装置4は、複数の圧力センサー112が互いに直交する二方向に少なくとも縦4行横4列に配置されている点で、上述の実施形態1で説明した圧力検出装置1と異なる。図8において、図2と同様の構成には同一の符号を付し、詳細な説明は省略する。尚、図8においては、便宜上、複数の圧力センサー112が単位検出領域S当たり縦4行横4列に配置されているが、実際には図10及び図11に示す様に複数の圧力センサー112が単位検出領域S当たり縦4行横4列以上に配置されていても良い。
図8に示す様に、圧力検出装置4は、基準点Pの周りに複数配置された圧力センサー112、を有する力検出器3と、基準点Pに重なる位置に重心が位置すると共に外力によって先端部が力検出器3に当接した状態で弾性変形する弾性体突起32、が形成された第3基板30と、を備えている。
複数の圧力センサー112は、互いに直交する二方向(X方向及びY方向)に少なくとも縦4行横4列に計16個配置されている。具体的には、複数の圧力センサー112は、単位検出領域S当たり少なくとも縦4行横4列に計16個配置されている。これら16個の圧力センサー112の中心(単位検出領域Sの中心)が基準点Pとなっている。
図9(a)〜(c)は、図3(a)〜(c)に対応した、実施形態2に係る圧力検出装置4の構造の変化を示す断面図である。図10(a)〜(c)は、図9(a)〜(c)に対応した、実施形態2に係る圧力検出装置4の圧力値の変化を示す平面図である。尚、図9(a)及び図10(a)は圧力検出装置4の表面に外力が付加される前の状態(外力の作用がないとき)を示している。図9(b)及び図10(b)は圧力検出装置4の表面に垂直方向の外力が付加された状態を示している。図9(c)及び図10(c)は圧力検出装置4の表面に斜め方向の外力が付加された状態を示している。また、図10(a)〜(c)において、符号Gは弾性体突起32の重心を示している。図9及び図10において、図3及び図4と同様の構成には同一の符号を付し、詳細な説明は省略する。
図9(a)及び図10(a)に示す様に、圧力検出装置4の表面に外力が付加される前においては、弾性体突起32は変形しない。これにより、力検出器3と第3基板30との間の距離は一定に保たれる。この時、弾性体突起32の重心Gは基準点Pと重なる位置に配置されている。この時の各圧力センサー112の圧力値は例えばメモリー(図示省略)に記憶されている。メモリーに記憶された各圧力センサー112の圧力値を基準として外力の作用する方向や大きさが求められる。
尚、力検出器3は、第1電極配線311を有する第1基板110と、第1電極配線311に対して交差する方向に配置された第2電極配線312を有する第2基板120と、両基板に挟持された感圧材料15とにより構成されている。第1基板110や第2基板120の材料構成は、実施形態1と同様である。
尚、力検出器3は、第1電極配線311を有する第1基板110と、第1電極配線311に対して交差する方向に配置された第2電極配線312を有する第2基板120と、両基板に挟持された感圧材料15とにより構成されている。第1基板110や第2基板120の材料構成は、実施形態1と同様である。
図9(b)及び図10(b)に示す様に、圧力検出装置4の表面に垂直方向の外力が付加された時には、弾性体突起32は先端部が力検出器3の表面に配置された複数の圧力センサー112に当接した状態でZ方向に圧縮変形する。これにより、第2基板120が−Z方向に撓み、力検出器3と第3基板30との間の距離が外力の作用がない時に比べて小さくなる。この時の圧力センサー112で検出された圧力値は、外力の作用がない時に比べて大きくなる。
図9(c)及び図10(c)に示す様に、圧力検出装置4の表面に斜め方向の外力が付加された時には、弾性体突起32は先端部が力検出器3の表面に配置された複数の圧力センサー112に当接した状態で斜めに傾いて圧縮変形する。これにより、第2基板120が−Z方向に撓み、力検出器3と第3基板30との間の距離が外力の作用がない時に比べて小さくなる。また、第2基板120の撓み量は−X方向成分よりも+X方向成分の方が大きくなる。この時、弾性体突起32の重心Gは基準点Pから+X方向及び+Y方向にずれる。この場合、弾性体突起32の先端部と複数の圧力センサー112との重なる面積の割合は、−X方向及び−Y方向に配置された部分と重なる面積よりも+X方向及び+Y方向に配置された部分と重なる面積のほうが重なる面積の割合が大きくなる。
図11は、図5に対応した、実施形態2に係るセンシング領域の座標系を示す図である。尚、図11において、複数の圧力センサーSi(112)(100個)が行列状に配置されており、このうちの25の圧力センサーSi(112)がそれぞれ−X方向及び+Y方向に区画された領域、+X方向及び+Y方向に区画された領域、−X方向及び−Y方向に区画された領域、+X方向及び−Y方向に区画された領域に配置されている。また、図11においては、便宜上、100個の圧力センサーSi(112)を図示しているが、圧力センサーSi(112)の配置数はこれに限らず任意に変更する事ができる。
図11に示す様に、複数の圧力センサーSi(112)は、単位検出領域S当たり縦10行横10列に計100個配置されている。ここで、各圧力センサーSi(112)が検出する圧力値(検出値)をそれぞれPi(i=1〜100)、基準点Pと各圧力センサーSi(112)との間の距離の面内方向成分をri(i=1〜100)とする。また、面内方向成分のうちX方向成分をrxi(i=1〜100)、面内方向成分のうちY方向成分をryi(i=1〜100)とすると、外力のX方向成分Fx(外力の面内方向成分のうちX方向に作用する分力)は以下の式(4)で表される。
また、外力のY方向成分Fy(外力の面内方向成分のうちY方向に作用する分力)は以下の式(5)で表される。
尚、式(4)及び式(5)のgは圧力検出装置4に固有な比例定数で力/長さの単位を有する。また、外力のZ方向成分Fz(外力の垂直方向成分)は以下の式(6)で表される。式(6)のAは、一つの圧力センサー112の面積である。
本実施形態では、外力の成分を検出する際に法線成分Fzに関しては式(6)を用い、滑り力に関しては式(4)及び式(5)を用いる。滑り力の検出に関しては、次の手順を踏む。まず、検出面上で第1軸(例えばX軸)と第2軸(例えばY軸)とを定める。第1軸に沿った滑り力の成分を検出するには、各圧力センサー112で検出された圧力値を距離の第1軸成分で重み付けし、これら重み付けされた圧力値(第1モーメントと称する)の総和を用いて所定の演算を行って求める。同様に、第2軸に沿った滑り力の成分を検出するには、各圧力センサー112で検出された圧力値を距離の第2軸成分で重み付けし、これら重み付けされた圧力値(第2モーメントと称する)の総和を用いて所定の演算を行って求める。所定の演算の一例としては、重み付けされた圧力値の総和を、総ての圧力センサー112で検出された圧力値の総和にて除し、圧力検出装置4に固有な比例定数gを乗ずる。
式(4)に示す様に、第1軸をX軸とし、外力のX方向成分Fxを求めるには、100個の圧力センサーSi(112)で検出された圧力値を用いて100個の第1モーメントを求め、これを総ての圧力センサー112で検出された圧力値の総和にて除し、圧力検出装置4に固有な比例定数gを乗ずる。
同様に、式(5)に示す様に、第2軸をY軸とし、外力のY方向成分Fyを求めるには、100個の圧力センサーSi(112)の圧力値を用いて100個の第2モーメントを求め、これを総ての圧力センサー112で検出された圧力値の総和にて除し、圧力検出装置4に固有な比例定数gを乗ずる。
式(6)に示す様に、外力のZ方向成分Fzを求めるには、100個の圧力センサーSi(112)で検出された圧力値を足し合わせ、これに一つの圧力センサー112の面積Aを乗ずる。但し、外力のZ方向成分Fzは、外力のX方向成分Fx及び外力のY方向成分Fyに比べて検出値が大きく検出される傾向がある。この為、外力のZ方向成分Fzの検出値を、外力のX方向成分Fxの検出値及び外力のY方向成分Fyの検出値と揃えるには、弾性体突起32の材質や形状によって決定される補正係数で検出値を適宜補正する必要がある。
本実施形態の圧力検出装置4によれば、複数の圧力センサー112が互いに直交する二方向に少なくとも縦4行横4列に配置されているので、実施形態1に比べて配置される圧力センサー112の数が多くなる。この為、多数の圧力センサー112で検出された圧力値に基づいて、外力の作用する方向と大きさとをより正確に求める事ができる。
尚、本発明は上述した実施形態に限定されず、上述した実施形態に種々の変更や改良などを加える事が可能である。変形例を以下に述べる。
(変形例1)
図12は変形例1における形状支持体の平面形状を説明した図である。以下、図12を用いて変形例1を説明する。実施形態1では形状支持体214は、隣り合う第2電極配線212間において互いに離間して配置されていたが、形状支持体214は、第2基板20よりも弾性係数が大きく、隣り合う第1電極配線211間において複数の第2電極配線212に亘って配置されていてもよい。
図12は変形例1における形状支持体の平面形状を説明した図である。以下、図12を用いて変形例1を説明する。実施形態1では形状支持体214は、隣り合う第2電極配線212間において互いに離間して配置されていたが、形状支持体214は、第2基板20よりも弾性係数が大きく、隣り合う第1電極配線211間において複数の第2電極配線212に亘って配置されていてもよい。
本変形例に示す様に、形状支持体214の弾性係数が第2基板20の弾性係数よりも大きいため、一つの圧力センサー12に加えられた力が形状支持体214を経由して隣の圧力センサー12に伝搬することを抑制できる。従って第2電極配線212に沿った方向での計測分解能と検出感度との低下を抑制できる。即ち、検出面に加えられた力を正確に測定する事ができる。換言すると、計測分解能が高く、計測感度も良い力検出器を提供する事ができる。また形状支持体214を、隣り合う第1電極配線211間において複数の第2電極配線212に亘って配置するため、形状支持体214の形成を容易にする事ができる。
(変形例2)
図13は変形例2における形状支持体の断面形状を説明した図である。以下、図13を用いて変形例2を説明する。実施形態1では、形状支持体214の断面形状は三角形であって第2電極配線212に沿って設けられた突出部212aは3か所の屈曲点を有していたが、屈曲点の個数はこれに限られず、1つ以上有ればよく、あるいは湾曲していても良い。図13(a)に示すように第2電極配線212は断面形状が長方形の形状支持体214に沿うように設けられた突出部212bを有している。図13(b)に示すように第2電極配線212は断面形状が台形の形状支持体214に沿うように設けられた突出部212cを有している。したがって図13(a)および(b)では4か所の屈曲点を有している。図13(c)に示すように第2電極配線212は断面形状が三角形の複数(2つ)の形状支持体214に沿うように設けられた複数(2つ)の突出部212aを有している。したがって、図13(c)では6か所の屈曲点を有している。図13(d)に示すように第2電極配線212は断面形状が半円形の形状支持体214に沿うように設けられた突出部212dを有している。図13(d)では突出部212dが湾曲している。即ち、第2電極配線212に設けられる突出部は複数の屈曲点あるいは湾曲点を有した断面形状を採用することができる。
図13は変形例2における形状支持体の断面形状を説明した図である。以下、図13を用いて変形例2を説明する。実施形態1では、形状支持体214の断面形状は三角形であって第2電極配線212に沿って設けられた突出部212aは3か所の屈曲点を有していたが、屈曲点の個数はこれに限られず、1つ以上有ればよく、あるいは湾曲していても良い。図13(a)に示すように第2電極配線212は断面形状が長方形の形状支持体214に沿うように設けられた突出部212bを有している。図13(b)に示すように第2電極配線212は断面形状が台形の形状支持体214に沿うように設けられた突出部212cを有している。したがって図13(a)および(b)では4か所の屈曲点を有している。図13(c)に示すように第2電極配線212は断面形状が三角形の複数(2つ)の形状支持体214に沿うように設けられた複数(2つ)の突出部212aを有している。したがって、図13(c)では6か所の屈曲点を有している。図13(d)に示すように第2電極配線212は断面形状が半円形の形状支持体214に沿うように設けられた突出部212dを有している。図13(d)では突出部212dが湾曲している。即ち、第2電極配線212に設けられる突出部は複数の屈曲点あるいは湾曲点を有した断面形状を採用することができる。
特に図13(c)に示す様に、第2電極配線212が圧力センサー12の外の領域に屈曲点を有する突出部212aを複数個有すると、屈曲する箇所が多くなるので、一つの圧力センサー12に加えられた力が第2電極配線212を経由して隣の圧力センサー12に伝播する事をより確実に抑制できる。即ち、第2電極配線212に沿った方向での計測分解能と検出感度との低下をより確実に抑制できる。
(変形例3)
図14は変形例3における力検出器の断面形状を説明した図である。以下、図14を用いて変形例3を説明する。実施形態1では形状支持体214に沿って感圧材料15側に屈曲又は湾曲した突出部212aが感圧材料15に直接接する構造であったのに対し、変形例3では形状支持体214に沿って感圧材料15側へ突出した第2電極配線212の突出部212aに絶縁層215を設け、該突出部212aにおいては第2電極配線212と感圧材料15とが絶縁される点が異なる。絶縁層215は第1電極配線211と第2電極配線212が交差する領域に被らないよう設けられていれば良い。
図14は変形例3における力検出器の断面形状を説明した図である。以下、図14を用いて変形例3を説明する。実施形態1では形状支持体214に沿って感圧材料15側に屈曲又は湾曲した突出部212aが感圧材料15に直接接する構造であったのに対し、変形例3では形状支持体214に沿って感圧材料15側へ突出した第2電極配線212の突出部212aに絶縁層215を設け、該突出部212aにおいては第2電極配線212と感圧材料15とが絶縁される点が異なる。絶縁層215は第1電極配線211と第2電極配線212が交差する領域に被らないよう設けられていれば良い。
本変形例に示す様に、突出部212aにおいて第2電極配線212と感圧材料15とが絶縁されると、感圧材料15側へ突出した第2電極配線212と第1電極配線211間での力検出を防止することができる。すなわち、第1電極配線211と第2電極配線212とが交差する領域のみを検出部とすることができ、より正確な力検出が可能となる。
<電子機器>
図15(a)は、上記実施形態に係る圧力検出装置1,4又は、上記変形例に係わる力検出器を用いた圧力検出装置1,4を適用した電子機器としての携帯電話機1000の概略構成を示す模式図である。携帯電話機1000は、複数の操作ボタン1003及びスクロールボタン1002、並びに表示部としての上記圧力検出装置を適用した液晶パネル1001を備えている。スクロールボタン1002を操作する事によって、液晶パネル1001に表示される画面がスクロールされる。液晶パネル1001にはメニューボタン(図示略)が表示される。例えば、メニューボタンを指で触れると電話帳が表示されたり、携帯電話機1000の電話番号が表示されたりする。
図15(a)は、上記実施形態に係る圧力検出装置1,4又は、上記変形例に係わる力検出器を用いた圧力検出装置1,4を適用した電子機器としての携帯電話機1000の概略構成を示す模式図である。携帯電話機1000は、複数の操作ボタン1003及びスクロールボタン1002、並びに表示部としての上記圧力検出装置を適用した液晶パネル1001を備えている。スクロールボタン1002を操作する事によって、液晶パネル1001に表示される画面がスクロールされる。液晶パネル1001にはメニューボタン(図示略)が表示される。例えば、メニューボタンを指で触れると電話帳が表示されたり、携帯電話機1000の電話番号が表示されたりする。
図15(b)は、上記実施形態に係る圧力検出装置1,4又は、上記変形例に係わる力検出器を用いた圧力検出装置1,4を適用した電子機器としての携帯情報端末(PDA:Personal Digital Assistants)2000の概略構成を示す模式図である。携帯情報端末2000は、複数の操作ボタン2002及び電源スイッチ2003、並びに表示部としての上記圧力検出装置を適用した液晶パネル2001を備えている。電源スイッチ2003を操作すると、液晶パネル2001にはメニューボタン(図示省略)が表示される。例えば、メニューボタン(図示省略)を指で触れると住所録が表示されたり、スケジュール帳が表示されたりする。
このような電子機器によれば、上述した圧力検出装置を備えているので、外力の方向と大きさを高い精度で検出する事が可能な電子機器を提供する事ができる。
尚、電子機器としては、この他にも、例えばパーソナルコンピューター、ビデオカメラのモニター、カーナビゲーション装置、ページャー、電子手帳、電卓、ワードプロセッサー、ワークステーション、テレビ電話、POS端末、デジタルスチルカメラ、タッチパネルを備えた機器等が挙げられる。これらの電子機器に対しても、本発明に係る圧力検出装置を適用させる事ができる。
<ロボット>
図16は、上記実施形態に係る圧力検出装置1,4又は、上記変形例に係わる力検出器を用いた圧力検出装置1,4を適用したロボットハンド3000の概略構成を示す模式図である。図16(a)に示す様に、ロボットハンド3000は、本体部3003及び一対のアーム部3002、並びに上記圧力検出装置を適用した把持部3001を備えている。例えば、リモコン等の制御装置によりアーム部3002に駆動信号を送信すると、一対のアーム部3002が開閉動作する。
図16は、上記実施形態に係る圧力検出装置1,4又は、上記変形例に係わる力検出器を用いた圧力検出装置1,4を適用したロボットハンド3000の概略構成を示す模式図である。図16(a)に示す様に、ロボットハンド3000は、本体部3003及び一対のアーム部3002、並びに上記圧力検出装置を適用した把持部3001を備えている。例えば、リモコン等の制御装置によりアーム部3002に駆動信号を送信すると、一対のアーム部3002が開閉動作する。
図16(b)に示す様に、ロボットハンド3000でコップ等の対象物3010を把持する場合を考える。この時、対象物3010に作用する力は把持部3001で圧力として検出される。ロボットハンド3000は、把持部3001として上述した圧力検出装置を備えているので、対象物3010の表面(接触面)に垂直な方向の力と併せて重力Mgですべる方向の力(滑り力の成分)を検出する事が可能である。例えば、柔らかい物体を変形させたり滑りやすい物体を落としたりしないよう、対象物3010の質感に応じて力を加減しながら持つ事ができる。
このロボットハンド3000によれば、上述した圧力検出装置を備えているので、外力の方向と大きさを高い精度で検出する事が可能なロボットハンド3000を提供する事ができる。
1…圧力検出装置、2…力検出器、3…力検出器、4…圧力検出装置、10…第1基板、12…圧力センサー、15…感圧材料、20…第2基板、30…第3基板、31…第3基板本体、32…弾性体突起、110…第1基板、112…圧力センサー、120…第2基板、211…第1電極配線、212…第2電極配線、212a,212b,212c,212d…突出部、214…形状支持体、311…第1電極配線、312…第2電極配線、1000…携帯電話機、2000…携帯情報端末、3000…ロボットハンド、3001…把持部、3010…対象物。
Claims (14)
- 第1基板と、
可撓性を有する第2基板と、
前記第1基板と前記第2基板との間に配置された感圧材料と、を備え、
前記第1基板は、前記感圧材料に面する側において互いに間隔を置いて設けられた複数の第1電極配線を含み、
前記第2基板は、前記感圧材料に面する側に設けられ、前記複数の第1電極配線と交差する第2電極配線を含み、
前記第1電極配線と前記第2電極配線とが交差する領域が検出部であり、
前記第2電極配線は、隣り合う前記検出部間において前記感圧材料側に屈曲または湾曲する突出部を有することを特徴とする力検出器。 - 前記第2基板は、隣り合う前記検出部間において前記第2電極配線を支持すると共に前記感圧材料側に屈曲または湾曲させる形状支持体を有することを特徴とする請求項1に記載の力検出器。
- 前記第2電極配線は、互いに間隔を置いて複数設けられ、
前記形状支持体は、隣り合う前記第2電極配線間において互いに離間して配置されていることを特徴とする請求項2に記載の力検出器。 - 前記第2電極配線は、互いに間隔を置いて複数設けられ、
前記形状支持体は、前記第2基板よりも弾性係数が大きく、隣り合う前記第1電極配線間において複数の前記第2電極配線に亘って配置されていることを特徴とする請求項2に記載の力検出器。 - 前記形状支持体は、前記第2基板に一体成形されていることを特徴とする請求項2乃至4のいずれか一項に記載の力検出器。
- 前記第2電極配線と前記感圧材料との間に設けられ、少なくとも前記第2電極配線の前記突出部を覆う絶縁層を備えたことを特徴とする請求項1乃至5のいずれか一項に記載の力検出器。
- 前記感圧材料が感圧導電性弾性体であることを特徴とする請求項1乃至6のいずれか一項に記載の力検出器。
- 前記感圧材料が弾性を有する誘電体物質であることを特徴とする請求項1乃至6のいずれか一項に記載の力検出器。
- 前記感圧材料が感圧スイッチであることを特徴とする請求項1乃至6のいずれか一項に記載の力検出器。
- 請求項1乃至9のいずれか一項に記載の力検出器と、
一方の面側に弾性体突起を有する第3基板と、を備え、
前記第3基板は、前記弾性体突起の先端部が前記第2基板の前記感圧材料に面する側に対して反対側の表面に接するように前記力検出器に対向配置されていることを特徴とする圧力検出装置。 - 前記力検出器において、前記第1電極配線と前記第2電極配線とが交差する領域が検出部であり、
前記第1基板には基準点が定められると共に、前記検出部は前記基準点の周りに複数個設けられ、
前記第3基板は、前記弾性体突起の重心が前記基準点と重なると共に、前記弾性体突起の先端部が前記基準点に接するように前記力検出器に対向配置されていることを特徴とする請求項10に記載の圧力検出装置。 - 外力によって前記弾性体突起が弾性変形することにより複数の前記検出部で検出された圧力値のうち任意に組み合わされた前記検出部でそれぞれ検出された圧力値の差分を演算し、その差分に基づいて外力が加えられた方向と外力の大きさを演算する演算装置を備えることを特徴とする請求項11に記載の圧力検出装置。
- 請求項10乃至12のいずれか一項に記載の圧力検出装置を備えたことを特徴とする電子機器。
- 請求項10乃至12のいずれか一項に記載の圧力検出装置を備えたことを特徴とするロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012755A JP2013152129A (ja) | 2012-01-25 | 2012-01-25 | 力検出器、圧力検出装置、電子機器及びロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012755A JP2013152129A (ja) | 2012-01-25 | 2012-01-25 | 力検出器、圧力検出装置、電子機器及びロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013152129A true JP2013152129A (ja) | 2013-08-08 |
Family
ID=49048592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012012755A Pending JP2013152129A (ja) | 2012-01-25 | 2012-01-25 | 力検出器、圧力検出装置、電子機器及びロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013152129A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015068662A (ja) * | 2013-09-27 | 2015-04-13 | セイコーエプソン株式会社 | 力検出装置及びロボット |
| WO2017099508A1 (ko) * | 2015-12-11 | 2017-06-15 | 엘지이노텍 주식회사 | 압력 감지 센서 장치 |
| WO2017175035A1 (ja) * | 2016-04-08 | 2017-10-12 | アイヂープ | 複数のチャネルを構成する圧力センサ、これを含むタッチ入力装置及びこれを用いた圧力検出方法 |
| KR20190114180A (ko) * | 2018-03-29 | 2019-10-10 | 고등기술연구원연구조합 | 압력 검출 매트 |
| CN110640775A (zh) * | 2019-11-04 | 2020-01-03 | 深圳蓝胖子机器人有限公司 | 一种力感知结构、灵巧手手指及多指灵巧手 |
| JP2020055064A (ja) * | 2018-10-01 | 2020-04-09 | 倉敷紡績株式会社 | シート状物品把持ロボット、シート状物品ハンドリングシステムおよびシート状物品ハンドリング方法 |
| EP3812108A1 (fr) * | 2019-10-25 | 2021-04-28 | Commissariat À L'Énergie Atomique Et Aux Énergies Alternatives | Procédé de réglage d'un système de préhension destiné à saisir au moins une plaque |
-
2012
- 2012-01-25 JP JP2012012755A patent/JP2013152129A/ja active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015068662A (ja) * | 2013-09-27 | 2015-04-13 | セイコーエプソン株式会社 | 力検出装置及びロボット |
| US10648873B2 (en) | 2015-12-11 | 2020-05-12 | Lg Innotek Co., Ltd. | Sensor device for detecting pressure |
| WO2017099508A1 (ko) * | 2015-12-11 | 2017-06-15 | 엘지이노텍 주식회사 | 압력 감지 센서 장치 |
| KR20170069673A (ko) * | 2015-12-11 | 2017-06-21 | 엘지이노텍 주식회사 | 압력 감지 센서 장치 |
| KR102382320B1 (ko) | 2015-12-11 | 2022-04-04 | 엘지이노텍 주식회사 | 압력 감지 센서 장치 |
| WO2017175035A1 (ja) * | 2016-04-08 | 2017-10-12 | アイヂープ | 複数のチャネルを構成する圧力センサ、これを含むタッチ入力装置及びこれを用いた圧力検出方法 |
| US10949040B2 (en) | 2016-04-08 | 2021-03-16 | Hideep Inc. | Pressure sensor constituting plurality of channels, touch input device including same, and pressure detection method in which same is used |
| JPWO2017175035A1 (ja) * | 2016-04-08 | 2019-02-21 | 株式会社 ハイディープHiDeep Inc. | 複数のチャネルを構成する圧力センサ、これを含むタッチ入力装置及びこれを用いた圧力検出方法 |
| KR102046010B1 (ko) * | 2018-03-29 | 2019-11-18 | 고등기술연구원연구조합 | 압력 검출 매트 |
| KR20190114180A (ko) * | 2018-03-29 | 2019-10-10 | 고등기술연구원연구조합 | 압력 검출 매트 |
| JP2020055064A (ja) * | 2018-10-01 | 2020-04-09 | 倉敷紡績株式会社 | シート状物品把持ロボット、シート状物品ハンドリングシステムおよびシート状物品ハンドリング方法 |
| JP7085449B2 (ja) | 2018-10-01 | 2022-06-16 | 倉敷紡績株式会社 | シート状物品把持ロボット、シート状物品ハンドリングシステムおよびシート状物品ハンドリング方法 |
| EP3812108A1 (fr) * | 2019-10-25 | 2021-04-28 | Commissariat À L'Énergie Atomique Et Aux Énergies Alternatives | Procédé de réglage d'un système de préhension destiné à saisir au moins une plaque |
| FR3102467A1 (fr) * | 2019-10-25 | 2021-04-30 | Commissariat à l'Energie Atomique et aux Energies Alternatives | Procédé de réglage d’un système de préhension destiné à saisir au moins une plaque |
| CN110640775A (zh) * | 2019-11-04 | 2020-01-03 | 深圳蓝胖子机器人有限公司 | 一种力感知结构、灵巧手手指及多指灵巧手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5821322B2 (ja) | 検出装置、電子機器及びロボット | |
| JP5821328B2 (ja) | 電子機器装置、ロボットハンド及びロボット | |
| CN102539022B (zh) | 检测装置、电子设备以及机械手 | |
| US8707802B2 (en) | Detection device, electronic apparatus, and robot | |
| JP2012163333A (ja) | 検出装置、電子機器及びロボット | |
| CN102564649B (zh) | 检测装置、电子设备以及机械手 | |
| JP2013152129A (ja) | 力検出器、圧力検出装置、電子機器及びロボット | |
| JP2012026906A (ja) | 検出装置、電子機器及びロボット | |
| JP2013096884A (ja) | 検出装置、電子機器、及びロボット | |
| JP2013117458A (ja) | 検出装置、電子機器及びロボット | |
| JP2013108754A (ja) | 力検出器、検出装置、電子機器及びロボット | |
| JP2012073051A (ja) | 検出装置、電子機器、及びロボット | |
| JP2013096846A (ja) | 検出装置、電子機器及びロボット | |
| JP2013064681A (ja) | 検出装置、電子機器、及びロボット | |
| JP2012132816A (ja) | 圧力検出装置、電子機器、及びロボット | |
| JP2012108021A (ja) | 検出装置、電子機器及びロボット | |
| JP2012098148A (ja) | 圧力検出装置、電子機器、及びロボット | |
| JP2012026905A (ja) | 検出装置、電子機器及びロボット | |
| JP2013088334A (ja) | 回転検出装置、検出装置、電子機器及びロボット | |
| JP2013113760A (ja) | 検出装置、電子機器及びロボット | |
| JP2012220316A (ja) | 検出装置、電子機器及びロボット | |
| JP2013108832A (ja) | 検出装置、電子機器及びロボット | |
| JP2012098147A (ja) | 圧力検出装置、電子機器、及びロボット | |
| JP2012220317A (ja) | 検出装置、電子機器及びロボット | |
| JP2012026907A (ja) | 検出装置、電子機器及びロボット |