JP2013190705A - 絞り羽根駆動装置 - Google Patents
絞り羽根駆動装置 Download PDFInfo
- Publication number
- JP2013190705A JP2013190705A JP2012058061A JP2012058061A JP2013190705A JP 2013190705 A JP2013190705 A JP 2013190705A JP 2012058061 A JP2012058061 A JP 2012058061A JP 2012058061 A JP2012058061 A JP 2012058061A JP 2013190705 A JP2013190705 A JP 2013190705A
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- driving wheel
- driving
- optical axis
- hall element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Diaphragms For Cameras (AREA)
Abstract
【課題】従来よりも薄型化が可能でかつ有効回動範囲を広くできるとともに、交換レンズに搭載可能なレンズ絞り駆動装置を提供する。
【解決手段】固定枠21と穴座22を有する円盤状のケーシング2と、ケーシング2内に設けられた複数の絞り羽根3と、各絞り羽根を光軸周りに回転させる動輪4と、動輪4を直接的に駆動するVCM5とを備え、VCM5は、所定間隔をおいて対向する一対の平板状ヨークと、厚さ方向に磁化され、平板状ヨークの少なくとも一方に固着された、希土類焼結磁石からなる平板状の駆動マグネット53a、53bと、光軸と直交する面内で駆動マグネット53a、53bに対して相対移動可能に支持される偏平な空芯コイル54とを有するとともに、動輪4は円周方向に沿って20°以上回動するように駆動される。
【選択図】図1
【解決手段】固定枠21と穴座22を有する円盤状のケーシング2と、ケーシング2内に設けられた複数の絞り羽根3と、各絞り羽根を光軸周りに回転させる動輪4と、動輪4を直接的に駆動するVCM5とを備え、VCM5は、所定間隔をおいて対向する一対の平板状ヨークと、厚さ方向に磁化され、平板状ヨークの少なくとも一方に固着された、希土類焼結磁石からなる平板状の駆動マグネット53a、53bと、光軸と直交する面内で駆動マグネット53a、53bに対して相対移動可能に支持される偏平な空芯コイル54とを有するとともに、動輪4は円周方向に沿って20°以上回動するように駆動される。
【選択図】図1
Description
本発明は、複数の絞り羽根を駆動して、光量を調整する絞り羽根駆動装置に関する。
デジタルスチルカメラあるいはビデオカメラ等の撮像用光学機器では、撮像レンズの光量を調整するために、複数枚の絞り羽根をモータにより駆動して開口径を変化させることが行われている。従来からこの種光量調節装置においては、絞り羽根の駆動源としてステッピングモータを使用し、モータの回転を、歯車減速機構を介して回転部材(矢車又は動輪と称される。)に伝達することが一般的である。例えば特許文献1(特開平6−95205号公報)には、ステッピングモータの出力軸にピニオンギアが取り付けられた駆動ユニットが例えばレンズ枠に固定され、ピニオンギアと噛み合う駆動ギアが側面に取付けられた動輪が回転される。動輪の表面には、複数の遮光部材(アパーチャ又は羽根)が装着され、動輪の裏面には、カム溝が形成された板が設けられており、動輪の回転により各アパーチャーがカム溝に沿って光軸側方向に動きしかも全てのアパーチャーが同じ軌跡で動くので、光軸上で略円形の開口が形成されて、遮光部分の面積を変化させることにより、光量の調整が行われることが開示されている。この絞り制御装置では、絞り羽根の位置を検出するために、フォトインタラプタを使用し、回転初期位置をフォトインタラプタのONをトリガーとすることにより、ステッピングモータのステップ数に応じた回転角度の調整が行われる(特許文献1の図4参照)。
上記のようにステッピングモータを使用することにより、広い範囲に亘ってかつ確実に開口面積を変化できるので、信頼性の高い光量調整を行えるという利点はあるが、次のような問題点が存在する。
(1)円盤状の絞りユニットに対して、ステッピングモータだけが突出した形状になるので、絞りユニット以外の部分でこの突出した部分を逃がす構造にする必要があり、設計の自由度が低下する。
(2)デジタルカメラの機能には、動画撮影(録画)モードも採用されているので、静音化が要求されるが、ステッピングモータの動作音と、ギアの噛み合い音が発生して、静音化の妨げになる。
(3)ステッピングモータの回転は、直接動輪に伝達されず、ギアを介して伝達されるので、ギアのバックラッシュが存在することから、繰り返し動作を行うと、再現性が低下することがある。
(4)絞りの開口面積の分解能は、ステッピングモータの基本ステップ角とギア比で定まるので、分解能の設定範囲が制約を受ける。
(1)円盤状の絞りユニットに対して、ステッピングモータだけが突出した形状になるので、絞りユニット以外の部分でこの突出した部分を逃がす構造にする必要があり、設計の自由度が低下する。
(2)デジタルカメラの機能には、動画撮影(録画)モードも採用されているので、静音化が要求されるが、ステッピングモータの動作音と、ギアの噛み合い音が発生して、静音化の妨げになる。
(3)ステッピングモータの回転は、直接動輪に伝達されず、ギアを介して伝達されるので、ギアのバックラッシュが存在することから、繰り返し動作を行うと、再現性が低下することがある。
(4)絞りの開口面積の分解能は、ステッピングモータの基本ステップ角とギア比で定まるので、分解能の設定範囲が制約を受ける。
また、絞り羽根の駆動手段として、ステッピングモータの代わりに、永久磁石式モータを使用することも提案されている。例えば特許文献2(特開昭54−99424号)には、光軸と直交する面内に光軸を中心に巻回された2個の固定コイルと、夫々光軸から等距離の位置に回動中心に持ち等間隔に配置された複数個の永久磁石回転子とからなり、永久磁石回転子の光軸と平行な磁束と、固定コイルに流される電流との電磁作用によって夫々の永久磁石回転子を回動させることにより、シャッター羽根または絞り羽根を、直接もしくは間接的に駆動するようにしたカメラ用電磁装置が開示されている。しかしこの電磁装置では、構造が複雑化し、さらに薄型化が困難である。
そこで絞り装置の薄型化を図るために、動輪の駆動手段としてボイスコイルモータ(VCM)とも称される電磁アクチュエータを使用し、しかも歯車伝達機構を省略して、動輪を電磁アクチュエータで直接駆動することが提案されている。例えば特許文献3(特開2006−217686号公報)には、ビデオカメラ用光学フィルタ駆動装置、露光用開口部を羽根で開閉するシャッター装置、あるいは露光用の開口部の開度を羽根で絞り調節する絞り装置等の駆動源として、可動磁石型の電磁アクチュエータを使用することが開示されている。この電磁アクチュエータは、ハウジングと、永久磁石及び出力レバーを有し揺動軸(出力レバー軸)を中心に揺動自在に支持された可動子と、励磁用のコイルを含む固定子とを有する。可動子は、揺動平面と平行で厚さ方向に着磁されかつ揺動軸の周方向に並ぶ4つの磁区に区画され、4つの磁区の着磁方向は交互に逆極性となるよう設定された平板状の永久磁石の板面の中心に揺動軸を配した構成を有する。コイルは永久磁石の板面と対面するよう平面状に巻回され、互いに略平行で逆向きに電流が流れる2つの直線部を有した空芯コイルであり、直線部を、主として永久磁石の板面と対面させつつ揺動軸を挟んで対向させ、且つ、隣接する2つの磁区を横切る方向に向けて配置されている。
この他にも、特許文献4(特開2007−183304号公報)には、光束を通過可能とする開口面積を変更して光束の光量を調整する遮光羽根と、電磁コイルおよび磁束を発生させ電磁コイルに通流される電流と磁束との相互作用による電磁力によって電磁コイルに対して移動し、遮光羽根に接続して遮光羽根を移動させる永久磁石を有する電磁アクチュエータと、永久磁石の磁場の強さに応じて所定の電圧を出力するホール素子、および所定の補正パラメータを取得し補正パラメータに基づいて磁気素子の出力特性を補正する出力特性補正部を有する位置センサと、を備える光学絞り装置が開示されている。
上述した特許文献3及び4に記載された絞り装置では、絞り羽根を直接電磁アクチュエータ(可動磁石形VCM)で駆動するので、絞り羽根の駆動手段としてステッピングモータを使用した場合の問題点{前述した(1)〜(4)}を解消することができる。しかしながら、位置センサ(ホール素子)から出力される直流電圧の直進性が良好な範囲は、回転角度に換算すると、5°程度までに過ぎず、直進性の良好な範囲に於いてホール出力電圧に比例するようにVCMで回転させて絞り径を可変する制御方式で絞り羽根を駆動する場合は、絞り開閉範囲が制約されるといった別の問題が発生する。
従って、本発明の目的は、従来よりも薄型化が可能でかつ有効回動範囲を広くできるとともに、交換レンズに搭載可能なレンズ絞り駆動装置を提供することである。
上記目的を達成するために、本発明のレンズ絞り駆動装置は、
光軸を中心とする円孔を有する円盤状のケーシングと、前記ケーシングの内部に、複数の絞り羽根と、前記各絞り羽根を光軸周りに回転させる動輪と、前記動輪を直接的に駆動する動輪駆動手段と、前記動輪駆動手段の位置を検出する位置検出手段とを備え、
前記動輪駆動手段は、所定間隔をおいて対向する一対の平板状ヨークと、厚さ方向に磁化され、前記平板状ヨークの少なくとも一方に固着された、希土類焼結磁石からなる駆動マグネットと、光軸と直交する面内で前記駆動マグネットに対して相対移動可能に支持される偏平な空芯コイルとを有するとともに、前記動輪は円周方向に沿って20°以上回動するように駆動され、
前記位置検出手段は、動輪に固定されたセンサマグネットとこのセンサマグネットに対向して前記ベース部材に固定された磁界検出素子を有することを特徴とする。
光軸を中心とする円孔を有する円盤状のケーシングと、前記ケーシングの内部に、複数の絞り羽根と、前記各絞り羽根を光軸周りに回転させる動輪と、前記動輪を直接的に駆動する動輪駆動手段と、前記動輪駆動手段の位置を検出する位置検出手段とを備え、
前記動輪駆動手段は、所定間隔をおいて対向する一対の平板状ヨークと、厚さ方向に磁化され、前記平板状ヨークの少なくとも一方に固着された、希土類焼結磁石からなる駆動マグネットと、光軸と直交する面内で前記駆動マグネットに対して相対移動可能に支持される偏平な空芯コイルとを有するとともに、前記動輪は円周方向に沿って20°以上回動するように駆動され、
前記位置検出手段は、動輪に固定されたセンサマグネットとこのセンサマグネットに対向して前記ベース部材に固定された磁界検出素子を有することを特徴とする。
本発明において、前記位置検出手段は、前記ケーシングに固定されるホール素子を有し、前記センサマグネットは、厚さ方向に磁化されかつ異極性の磁極が隣接するように配置された直方体形状を有する一対のセンサマグネットであり、かつ、両マグネットの一端から境界に向って前記磁界検出素子と対向するギャップが連続的に増加するように配置することが好ましい。
本発明において、前記各センサマグネットは、前記ホール素子の感磁面と平行な直線に対して検出用磁極面が10°〜30°の角度範囲だけ傾いて設置されることが好ましい。
本発明において、前記センサマグネットは、光軸方向から見て、長手方向の稜線が光軸を中心とする円に接するように配置されていることが好ましい。
本発明において、前記ヨークの一方は、駆動マグネットとの間に円周方向に沿って磁気吸引力を発生するように配置されていることが好ましい。
本発明によれば、絞りユニットの薄型化と静音化並びに部品点数の削減が可能であり、モータの分解能が制限されず、さらに絞り開閉範囲を広げることができるので、極めて高い実用性を有する。
以下本発明の詳細を添付図面により説明する。なお、以下の説明で同一機能部分は同一の参照符号で示す。
<全体構成>
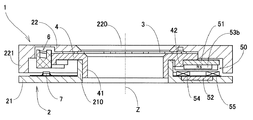
レンズ絞り駆動装置1は、図1及び図2〜5に示すように、固定枠21と穴座22を組み合せて形成され、光軸Z(図4、図5及び図6参照)を中心とする円孔220を有する円盤状のケーシング2の内部に、複数枚の絞り羽根3と、これらの絞り羽根を開閉するために、光軸を中心にして所定の角度範囲で往復回転する動輪4と、動輪駆動手段であるボイスコイルモータ(以下「VCM」という。)5と、動輪4の回転位置を検出する位置検出部材6が収容された構造を有する。このレンズ絞り駆動装置1の各部の構成は次の通りである。
レンズ絞り駆動装置1は、図1及び図2〜5に示すように、固定枠21と穴座22を組み合せて形成され、光軸Z(図4、図5及び図6参照)を中心とする円孔220を有する円盤状のケーシング2の内部に、複数枚の絞り羽根3と、これらの絞り羽根を開閉するために、光軸を中心にして所定の角度範囲で往復回転する動輪4と、動輪駆動手段であるボイスコイルモータ(以下「VCM」という。)5と、動輪4の回転位置を検出する位置検出部材6が収容された構造を有する。このレンズ絞り駆動装置1の各部の構成は次の通りである。
[ケーシング]
固定枠21は、内径側にリング状の支持部210を有し、外周側に円周方向に沿って、例えば等角度間隔で設けられた複数(例えば3個)の段部212を有するとともに、所定位置に扇形のヨーク保持孔211を有する略円板状部材である。穴座枠22は、円孔220を有し、外周側に外環部221を有し、絞り羽根側の面には絞り羽根の支持軸31が嵌合される穴(図示せず)が絞り羽根枚数と同じ数だけかつ光軸Zを中心とする同心円上に設けられており、穴座端面に円周方向に沿って、例えば等角度間隔で設けられた複数(例えば3個)の突起部222を有する略円板状部材である。固定枠21に後述の各部品を組み付けた後、この穴座枠22の突起部222の先端を固定枠21の段部に嵌め込み、固定枠21と結合することによりケーシング2が形成されて、レンズ絞り駆動装置1が組立てられる。
固定枠21は、内径側にリング状の支持部210を有し、外周側に円周方向に沿って、例えば等角度間隔で設けられた複数(例えば3個)の段部212を有するとともに、所定位置に扇形のヨーク保持孔211を有する略円板状部材である。穴座枠22は、円孔220を有し、外周側に外環部221を有し、絞り羽根側の面には絞り羽根の支持軸31が嵌合される穴(図示せず)が絞り羽根枚数と同じ数だけかつ光軸Zを中心とする同心円上に設けられており、穴座端面に円周方向に沿って、例えば等角度間隔で設けられた複数(例えば3個)の突起部222を有する略円板状部材である。固定枠21に後述の各部品を組み付けた後、この穴座枠22の突起部222の先端を固定枠21の段部に嵌め込み、固定枠21と結合することによりケーシング2が形成されて、レンズ絞り駆動装置1が組立てられる。
[絞り羽根]
絞り羽根3は、3枚以上(本実施の形態では、例えば7枚)の羽根が同時に同方向に回転することにより、常に、光軸を中心にした円形に近い絞り口径が得られるようにした形状を有するものが使用される。各絞り羽根3は、支持軸31と案内ピン32を有し、各支持軸31は、穴座枠2に軸支されて動輪4の回転方向と同方向に回転可能とされるとともに、円形に近い絞り口径が得られるようにするために、動輪4には円弧形状を有するカム溝40が刻設されて、そこに案内ピン32が差し込まれる。動輪4は絞り口径の最大口径を規制するために、光軸を中心にした円形の開口部40を有している。
絞り羽根3は、3枚以上(本実施の形態では、例えば7枚)の羽根が同時に同方向に回転することにより、常に、光軸を中心にした円形に近い絞り口径が得られるようにした形状を有するものが使用される。各絞り羽根3は、支持軸31と案内ピン32を有し、各支持軸31は、穴座枠2に軸支されて動輪4の回転方向と同方向に回転可能とされるとともに、円形に近い絞り口径が得られるようにするために、動輪4には円弧形状を有するカム溝40が刻設されて、そこに案内ピン32が差し込まれる。動輪4は絞り口径の最大口径を規制するために、光軸を中心にした円形の開口部40を有している。
[動輪]
動輪4は、円環状の摺動部41が、固定枠21の支持部210に装着され、支持部210の外周面に沿って回転可能に支持される。動輪4には直接VCM5の磁気回路部材50(バックヨーク51及び駆動マグネット53a、53b)が取り付けられているので、図3において、VCM5の磁気回路部材51を所定方向(例えば反時計方向)へ回転させると、動輪4も同方向(反時計方向)に回転し、各絞り羽根3は支持軸31を支点にして反時計方向に回転する。
動輪4は、円環状の摺動部41が、固定枠21の支持部210に装着され、支持部210の外周面に沿って回転可能に支持される。動輪4には直接VCM5の磁気回路部材50(バックヨーク51及び駆動マグネット53a、53b)が取り付けられているので、図3において、VCM5の磁気回路部材51を所定方向(例えば反時計方向)へ回転させると、動輪4も同方向(反時計方向)に回転し、各絞り羽根3は支持軸31を支点にして反時計方向に回転する。
[VCM]
(構成)
VCM5は、図6も参照すると、動輪4を駆動する磁気回路部材50と、磁気回路部材50内に配置される空心コイル54と、磁気回路部材50の位置を検出する位置検出部材6を備えている。磁気回路部材50は、固定枠21に固着されたアークセグメント形状の固定ヨーク52と、動輪4に固着されたアークセグメント形状のバックヨーク51からなる一対のヨーク部材と、厚さ方向に磁化され、バックヨーク51に固着された一対の平板状のマグネット53a、53bを有する。動輪4の固定枠21に対向する側の面には、規制部材42a、42bが固定されており、これらの規制部材間にバックヨーク51が固定される。駆動マグネット53a、53bは、光軸と直交する平面で異極性の磁極が隣接するように配置されており、一対のヨーク間に一方のヨークから他方のヨークに向う磁束が発生する。固定枠21の表面には、中空円板状のフレキシブル配線基板55が装着され、その表面には、光軸と直交する平面において巻線が巻回された偏平な(略台形状の)空芯コイル54が固着される。
(構成)
VCM5は、図6も参照すると、動輪4を駆動する磁気回路部材50と、磁気回路部材50内に配置される空心コイル54と、磁気回路部材50の位置を検出する位置検出部材6を備えている。磁気回路部材50は、固定枠21に固着されたアークセグメント形状の固定ヨーク52と、動輪4に固着されたアークセグメント形状のバックヨーク51からなる一対のヨーク部材と、厚さ方向に磁化され、バックヨーク51に固着された一対の平板状のマグネット53a、53bを有する。動輪4の固定枠21に対向する側の面には、規制部材42a、42bが固定されており、これらの規制部材間にバックヨーク51が固定される。駆動マグネット53a、53bは、光軸と直交する平面で異極性の磁極が隣接するように配置されており、一対のヨーク間に一方のヨークから他方のヨークに向う磁束が発生する。固定枠21の表面には、中空円板状のフレキシブル配線基板55が装着され、その表面には、光軸と直交する平面において巻線が巻回された偏平な(略台形状の)空芯コイル54が固着される。
(固定ヨークの位置)
光軸と直交する面で、固定ヨーク52は無通電状態に於いて全閉状態から更に全閉方向に吸引力によって回転する方向にずれた位置に配置することができるし、あるいは全開状態から更に全開方向に吸引力によって回転する方向にずれた位置に配置されることができる。このように特定の位置に固定ヨークを設けることによって、無通電状態においても、絞り口径を確実に全閉又は全開状態を維持することができる。
光軸と直交する面で、固定ヨーク52は無通電状態に於いて全閉状態から更に全閉方向に吸引力によって回転する方向にずれた位置に配置することができるし、あるいは全開状態から更に全開方向に吸引力によって回転する方向にずれた位置に配置されることができる。このように特定の位置に固定ヨークを設けることによって、無通電状態においても、絞り口径を確実に全閉又は全開状態を維持することができる。
(駆動マグネットの材質)
VCMの推力は、空芯コイルに供給する電流と空隙磁束密度に比例するので、応答性を高めるために、駆動マグネットは、希土類焼結磁石で形成することが必要である。希土類焼結磁石としては、例えばR−T−B系焼結磁石(但し、RはYを含む希土類元素の一種以上で、Ndを必ず含み、TはFe又はFeとCoである。)を使用することができる。特に、R−T−B系焼結磁石として、45MGOe以上の最大エネルギー積を有しかつ残留磁束密度が高いものを使用することが望ましい。
VCMの推力は、空芯コイルに供給する電流と空隙磁束密度に比例するので、応答性を高めるために、駆動マグネットは、希土類焼結磁石で形成することが必要である。希土類焼結磁石としては、例えばR−T−B系焼結磁石(但し、RはYを含む希土類元素の一種以上で、Ndを必ず含み、TはFe又はFeとCoである。)を使用することができる。特に、R−T−B系焼結磁石として、45MGOe以上の最大エネルギー積を有しかつ残留磁束密度が高いものを使用することが望ましい。
(動作)
この空芯コイル54は、駆動マグネット53a、53bの表面に形成された磁気空隙内に介装されているので、コイルに駆動電流が供給されることにより、フレミングの左手の法則に基づいて、光軸を中心としてマグネット53a、53bが回転し、動輪4が駆動される。動輪4が光軸を中心として回転することにより、絞り羽根を開閉することができる。駆動電流の大きさを調整することにより、マグネットの回転角度を調整できるとともに、電流の向きを反転させることにより、マグネットの回転方向を反転することができる。例えば駆動マグネット53aの空芯コイル54に対向する側の磁極がN、駆動マグネット53bの空芯コイル54に対向する側の磁極がSである場合、空芯コイル54に電流(図8の矢印i方向に流れる)を供給すると、駆動マグネットはF方向(図8参照)に回転して、図9に示す絞り羽根が全開した状態が現出する。またVCM5には、吸引機能を有するような位置にヨーク(固定ヨーク)が設けられるので、駆動マグネット53a、53bと固定ヨーク52との間には、常に円周方向に沿って磁気吸引力が作用する。したがって、空芯コイルへの通電が遮断された場合でも、自動的に絞りを全開又は全閉状態に維持することができる。
この空芯コイル54は、駆動マグネット53a、53bの表面に形成された磁気空隙内に介装されているので、コイルに駆動電流が供給されることにより、フレミングの左手の法則に基づいて、光軸を中心としてマグネット53a、53bが回転し、動輪4が駆動される。動輪4が光軸を中心として回転することにより、絞り羽根を開閉することができる。駆動電流の大きさを調整することにより、マグネットの回転角度を調整できるとともに、電流の向きを反転させることにより、マグネットの回転方向を反転することができる。例えば駆動マグネット53aの空芯コイル54に対向する側の磁極がN、駆動マグネット53bの空芯コイル54に対向する側の磁極がSである場合、空芯コイル54に電流(図8の矢印i方向に流れる)を供給すると、駆動マグネットはF方向(図8参照)に回転して、図9に示す絞り羽根が全開した状態が現出する。またVCM5には、吸引機能を有するような位置にヨーク(固定ヨーク)が設けられるので、駆動マグネット53a、53bと固定ヨーク52との間には、常に円周方向に沿って磁気吸引力が作用する。したがって、空芯コイルへの通電が遮断された場合でも、自動的に絞りを全開又は全閉状態に維持することができる。
[位置検出部材]
位置検出部材6は、図2、図3及び図7も参照すると、配線基板55の表面に実装される磁界検出素子(例えばホール素子)7と、動輪4の外周円44(但し一部は拡径されている)から半径方向に延出する円弧状の保持部材43に固着される直方体形状を有するセンサヨーク61a、61b及びセンサマグネット62a、62bを備えている。
位置検出部材6は、図2、図3及び図7も参照すると、配線基板55の表面に実装される磁界検出素子(例えばホール素子)7と、動輪4の外周円44(但し一部は拡径されている)から半径方向に延出する円弧状の保持部材43に固着される直方体形状を有するセンサヨーク61a、61b及びセンサマグネット62a、62bを備えている。
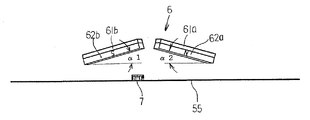
上記のセンサマグネット62a、62bは、側面から見ると(図7参照)、一端部から他端部(他方のセンサマグネットに近い側)に向って上り勾配の強磁性体(例えば鉄鋼材料)からなるセンサヨーク61aと、一端から他端に向って下り勾配の強磁性体(例えば鉄鋼材料)からなるセンサヨーク61bの表面(配線基板側)に各々、固着されている。また平面(光軸方向)から見ると(図3参照)、センサヨーク61a、61bとセンサマグネット62a、62bの幅及び長さは同一であり、各マグネットの長手方向の稜線は、光軸を中心とする円(動輪4の外径よりも大径)に接するように配置される。これらのセンサマグネット62a、62bは、異極性の磁極が隣接するように厚さ方向に着磁されているので(図7では、ホール素子側の磁極のみ示す。)、一方のセンサマグネットから他方のセンサマグネット(本実施の形態では、マグネット62aから62b)に向って、ホール素子7を通過する閉じた磁気回路が形成される。
また各センサマグネット62a、62bの背面側(ホール素子7の感磁面に対向しない側の磁極面)には、各マグネットと同一の投影面積(光軸方向から見た場合の面積)を有する、強磁性体からなる一対の平板状ヨーク(センサヨーク61a、61b)が固着されている。これらの平板状ヨークはセンサマグネットから発生する磁束が外部に漏洩するのを防止する(磁気シールド)機能を有し、R−Fe-B系焼結磁石のように永久磁石の磁気特性が高い場合は有効である。但しマグネットの磁気特性が低く、漏洩磁束が少ない場合は、センサヨークを省略することができる。
図7に示すように、各センサマグネット62a、62bは、紙面に垂直な方向から見て逆V字状を呈するように配置される。すなわちマグネット62a、62bは、光軸と直交する平面に対して角度α1、α2だけ傾斜するように保持部材43の保持孔430a、430bに保持される。したがってマグネット62aの一端部とマグネット62bの一端部が近接又は接触する位置から各磁石の他端部に向かって、ホール素子7の感磁面とマグネット62aの磁極面とのギャップが単調に減少し、ホール素子7の感磁面とマグネット62bの磁極面とのギャップも単調に減少するように配置されている。ここでギャップ(最小値)は、狭すぎると磁束波形が歪やすくなり、また広すぎても曲線状に変化する部分が増大して、直線領域が短くなるので、GaAs系ホール素子を使用する場合で、1mm以上、3mm未満に設定することが好ましい。また角度α1と角度α2は同一でもあるいは異なっていてもよいが、10°〜30°の範囲で設定することが好ましい。
一対のセンサマグネットをこのように配置することにより、ホール素子7の感磁面における磁束密度はマグネットのほぼ全長にわたって直線的に変化するようになり、ホール素子7の出力電圧も直線的に変化する。磁束密度がゼロになる初期位置では、ホール素子の出力電圧もゼロになる。この初期位置からマグネットが回転することにより、ホール素子で検出される磁束密度が直線的に変化する。これにより、ホール素子から出力される電圧が単調に増加又は減少するので、現在位置を正確に把握することができる。
上記のセンサマグネットは、材質を問わず、公知の永久磁石で形成することができるが、耐ノイズ特性の観点から、入力回路側ゲインを低く設定し、かつセンサ部の小型化を図るために、希土類磁石、例えばR−Fe-B系焼結磁石(但し、RはYを含む希土類元素の一種以上で、Ndを必ず含む。)で形成することが好ましい。
(ホール素子)
ホール素子の出力電圧は、材料の電子移動度やホール係数に依存し、通常はGaAs、InSb、InAs等のIII−V族化合物からなるN型半導体の薄膜(厚さ数μm)で形成されたホール素子が使用される。本発明では、高精度の位置制御を可能とするために、ホール係数の温度係数が小さい(約−0.06%/℃)、GaAsで形成されたホール素子を使用することが好ましい。また化合物系以外でも、Siからなるホール素子を使用し、ホール素子とオペアンプ等の信号処理回路を一体化したホールICを使用することができるが、ホール素子の感度が低いので、ホール素子及びオペアンプのオフセット電圧を低減し、かつ温度補償機能をもつ回路構成とすることが好ましい。
ホール素子の出力電圧は、材料の電子移動度やホール係数に依存し、通常はGaAs、InSb、InAs等のIII−V族化合物からなるN型半導体の薄膜(厚さ数μm)で形成されたホール素子が使用される。本発明では、高精度の位置制御を可能とするために、ホール係数の温度係数が小さい(約−0.06%/℃)、GaAsで形成されたホール素子を使用することが好ましい。また化合物系以外でも、Siからなるホール素子を使用し、ホール素子とオペアンプ等の信号処理回路を一体化したホールICを使用することができるが、ホール素子の感度が低いので、ホール素子及びオペアンプのオフセット電圧を低減し、かつ温度補償機能をもつ回路構成とすることが好ましい。
(信号処理回路)
ホール素子7は、可動部材の位置を電圧信号として出力するために、図10に示すように例えばオペアンプを含む位置信号処理回路8に接続されている。本発明においては、4端子のホール素子7を駆動して、磁束密度に比例した出力電圧を得るために、ホール素子の入力側端子に駆動回路(不図示)を接続し、ホール素子の出力側端子に差動増幅回路82を接続した回路構成とすることができる。ホール素子は定電流又は定電圧で駆動されるが、GaAsホール素子は、定電圧で駆動すると温度特性が悪くなる(約−0.3%/℃)ので、通常は定電流で駆動される。本発明においては、図10に示すようにホール素子7の入力側に、非反転入力端子に電源(Vc=基準電圧)が接続されたオペアンプOP1と電流制限抵抗R1からなる定電流駆動回路81を接続して、制御電流Ic=Vc/R1となる定電流動作で駆動することができる。
ホール素子7は、可動部材の位置を電圧信号として出力するために、図10に示すように例えばオペアンプを含む位置信号処理回路8に接続されている。本発明においては、4端子のホール素子7を駆動して、磁束密度に比例した出力電圧を得るために、ホール素子の入力側端子に駆動回路(不図示)を接続し、ホール素子の出力側端子に差動増幅回路82を接続した回路構成とすることができる。ホール素子は定電流又は定電圧で駆動されるが、GaAsホール素子は、定電圧で駆動すると温度特性が悪くなる(約−0.3%/℃)ので、通常は定電流で駆動される。本発明においては、図10に示すようにホール素子7の入力側に、非反転入力端子に電源(Vc=基準電圧)が接続されたオペアンプOP1と電流制限抵抗R1からなる定電流駆動回路81を接続して、制御電流Ic=Vc/R1となる定電流動作で駆動することができる。
ホール素子の出力を受ける差動増幅回路82においては、抵抗R3が負帰還接続されたオペアンプOP2と、オペアンプOP2の反転入力端子に接続された抵抗R2及びオペアンプOP2の非反転入力端子に接続された抵抗R2、R3により、ホール素子の出力電圧は差動増幅される。この差動増幅回路のゲインGはR3/(R2+Rout)となるので、R2及びR3を調整することにより、被駆動部材の位置情報を適切な電圧信号として出力することができる。
[位置検出部材の動作]
ホール素子7によって検出された位置信号(可動部材の移動量)は信号処理回路8によって所定の倍率に増幅され、次いで制御回路(不図示)で目標位置指令(駆動マグネット位置指令信号)と比較されて駆動信号が生成されて、VCMの駆動回路に駆動電流が供給される。ここでホール素子7の感度中心が初期位置(極性が反転する磁極境界位置)に存在すると、ホール素子の出力電圧はゼロであるが、ホール素子7がセンサマグネットに対して円周方向に相対移動するため、ホール素子の出力電圧は磁束密度に比例して変化する(直線的に増加又は減少する)ので、可動部材の位置を正確に検出することができる。したがって、図3において、動輪4が時計(反時計)方向に所定角度だけ移動して、その位置で停止するので、所定の絞り径を得ることができる。
ホール素子7によって検出された位置信号(可動部材の移動量)は信号処理回路8によって所定の倍率に増幅され、次いで制御回路(不図示)で目標位置指令(駆動マグネット位置指令信号)と比較されて駆動信号が生成されて、VCMの駆動回路に駆動電流が供給される。ここでホール素子7の感度中心が初期位置(極性が反転する磁極境界位置)に存在すると、ホール素子の出力電圧はゼロであるが、ホール素子7がセンサマグネットに対して円周方向に相対移動するため、ホール素子の出力電圧は磁束密度に比例して変化する(直線的に増加又は減少する)ので、可動部材の位置を正確に検出することができる。したがって、図3において、動輪4が時計(反時計)方向に所定角度だけ移動して、その位置で停止するので、所定の絞り径を得ることができる。
[絞り羽根の開閉動作]
上記の構成を有する絞り駆動装置において、絞り羽根の開閉動作を図8及び図9により説明する。図8及び図9では、絞り羽根の一部(3枚)は省略されている。VCM5の空芯コイル54に電流が供給されない場合は、絞り羽根3は図8に示す状態に維持され、絞り開口は全閉状態に維持される。空芯コイル54に通電されて、動輪4が光軸を中心として時計方向に回転してマグネット53a、53bも同方向に回転すると、絞り羽根3が支持軸31を支点としてカム溝40に沿って回動するので、図9に示すように絞り口径が開放される。ここでセンサマグネット62aの端部がホール素子7に対面すると、ホール素子7の出力電圧はゼロになり、その位置で駆動電流の供給が中断されるように制御される。また、図9に示す全開状態から図8に示す最小口径状態に変化させる場合は、空芯コイル54に供給される電流の向きを反転させればよく、図9の状態になる前にVCM5を所望の位置で停止させれば、各停止位置に対応した絞り口径を得ることができる。この開閉動作の終端では、駆動マグネット53a及び駆動マグネット53bは、固定ヨーク52に向かって磁気的に吸引されるので、空芯コイル54への電流の供給が中止されても、両マグネットはその位置で保持されて、絞り口径を維持することができる。
上記の構成を有する絞り駆動装置において、絞り羽根の開閉動作を図8及び図9により説明する。図8及び図9では、絞り羽根の一部(3枚)は省略されている。VCM5の空芯コイル54に電流が供給されない場合は、絞り羽根3は図8に示す状態に維持され、絞り開口は全閉状態に維持される。空芯コイル54に通電されて、動輪4が光軸を中心として時計方向に回転してマグネット53a、53bも同方向に回転すると、絞り羽根3が支持軸31を支点としてカム溝40に沿って回動するので、図9に示すように絞り口径が開放される。ここでセンサマグネット62aの端部がホール素子7に対面すると、ホール素子7の出力電圧はゼロになり、その位置で駆動電流の供給が中断されるように制御される。また、図9に示す全開状態から図8に示す最小口径状態に変化させる場合は、空芯コイル54に供給される電流の向きを反転させればよく、図9の状態になる前にVCM5を所望の位置で停止させれば、各停止位置に対応した絞り口径を得ることができる。この開閉動作の終端では、駆動マグネット53a及び駆動マグネット53bは、固定ヨーク52に向かって磁気的に吸引されるので、空芯コイル54への電流の供給が中止されても、両マグネットはその位置で保持されて、絞り口径を維持することができる。
[実験例1]
図1において、α1=α2=15°に設定し、かつホール素子7とセンサマグネット62a、62bのギャップ(最少値)を2.5mmに設定した場合のZ方向の磁束密度分布を求めた。ここでセンサマグネットは、Nd−Fe−B系焼結磁石(日立金属社製NMX−S45SH、長さ=8mm、幅=2mm、厚さ=1mm)を使用し、GaAs系ホール素子を使用して、ホール素子7がセンサマグネット62aの端部からセンサマグネット62bの端部まで移動した場合の磁束波形をシミュレーションで求めた。センサマグネット62aとセンサマグネット62bの中間(初期位置)では磁束密度が略ゼロとなるので、この位置ではホール素子の出力電圧がゼロになるように出力電圧のオフセットが調整される。
図1において、α1=α2=15°に設定し、かつホール素子7とセンサマグネット62a、62bのギャップ(最少値)を2.5mmに設定した場合のZ方向の磁束密度分布を求めた。ここでセンサマグネットは、Nd−Fe−B系焼結磁石(日立金属社製NMX−S45SH、長さ=8mm、幅=2mm、厚さ=1mm)を使用し、GaAs系ホール素子を使用して、ホール素子7がセンサマグネット62aの端部からセンサマグネット62bの端部まで移動した場合の磁束波形をシミュレーションで求めた。センサマグネット62aとセンサマグネット62bの中間(初期位置)では磁束密度が略ゼロとなるので、この位置ではホール素子の出力電圧がゼロになるように出力電圧のオフセットが調整される。
図11に示すように、本発明の場合は、磁束密度の変化が直線的になるのは、極めて広い角度範囲(θ2−θ1=約27°)になることがわかる。これに対して、ホール素子とセンサマグネットの端部とのギャップが円周方向に沿って一定の場合は、磁束密度の変化が直線的になるのは、磁極境界の近傍にすぎず、極めて狭い範囲(約5°)になることが確認された。
本実施の形態の効果を列挙すると次の通りである。
(i)絞りユニットのフラット化が可能で、しかもレンズ全体の設計自由度の増加、構造の簡素化及びダウンサイジングが可能になる。またカメラボディ側に駆動装置を内蔵した場合でも、ダウンサイジングが可能となる。
(i)絞りユニットのフラット化が可能で、しかもレンズ全体の設計自由度の増加、構造の簡素化及びダウンサイジングが可能になる。またカメラボディ側に駆動装置を内蔵した場合でも、ダウンサイジングが可能となる。
(ii)可動部が非接触で回転するVCMを使用するので、モータの走行音及び減速機構からのギア音が皆無となる。しかもVCMの出力が直接動輪に伝達されるダイレクト駆動なので、部品点数を削減できる。
(iii)駆動装置の推力は、コイルに流す駆動電流に比例するので、制御方式によらず、絞りの開口面積の分解能を小さくすることができる。
(iii)駆動装置の推力は、コイルに流す駆動電流に比例するので、制御方式によらず、絞りの開口面積の分解能を小さくすることができる。
特に、イニシャライズ位置は、移動範囲の中間になるので、従来のフォトインタラプタと比べて原点設定に要する移動距離すなわち原点設定時間が半分になり、もってセンシングの高速化を図ることができる。
ホール素子からは移動距離に比例したアナログ電圧が出力されるので、その読み取り精度を高めることにより、分解能を高くすることができる。しかも光軸方向の長さ寸法を移動長さと同等に設定すればよいので、検出磁石を光軸方向と直交する面内において、可動部材の回転角度を例えば20°以上と大きくすることができる。
(変形例)
上記の実施の形態では、VCMは、駆動マグネットを動輪に固定し、空芯コイルを固定枠に設けた構造(可動マグネット型VCM)を示すが、応答性を向上することを目的として、可動部の軽量化を図るために、駆動マグネットを固定枠に設け、空芯コイルを動輪に設けた構造(可動コイル型VCM)であってもよい。
上記の実施の形態では、VCMは、駆動マグネットを動輪に固定し、空芯コイルを固定枠に設けた構造(可動マグネット型VCM)を示すが、応答性を向上することを目的として、可動部の軽量化を図るために、駆動マグネットを固定枠に設け、空芯コイルを動輪に設けた構造(可動コイル型VCM)であってもよい。
また駆動マグネットの形状は平板状であれば、その形状は円弧状に限らず直方体状であってもよい。さらに磁気吸引を利用して無通電時の自己保持機能を持たせる代わりに、動輪を所定方向にバネで付勢しておくこともできる。
上記以外にも、動輪と固定枠の摺動は円環状の内外径の摺動に限るものではなく、光軸と直交する面に摺動部を設けても良く、またその他の別部材例えばベアリングのようなものを用いて摺動させても良い。
1:レンズ絞り駆動装置、
2:ケーシング、
21:固定枠、210:支持部、211:ヨーク保持孔、212:段部、
22:穴座枠、220:円孔、221:外環部、222:突起部、
3:絞り羽根、31:支持軸、32:案内ピン、
4:動輪、40:カム溝、41:摺動部、42a、42b:規制部材、43:保持部材、430a、430b:磁石部材保持孔、44:外周円
5:ボイスコイルモータ(VCM)
50:磁気回路部材、51:バックヨーク、52:固定ヨーク、53a、53b:駆動マグネット、54:空芯コイル、55:フレキシブル基板、
6:位置検出部材、61a、61b:センサヨーク、62a、62b:センサマグネット、7:ホール素子、
8:信号処理回路、81:定電流回路、82:増幅回路、
2:ケーシング、
21:固定枠、210:支持部、211:ヨーク保持孔、212:段部、
22:穴座枠、220:円孔、221:外環部、222:突起部、
3:絞り羽根、31:支持軸、32:案内ピン、
4:動輪、40:カム溝、41:摺動部、42a、42b:規制部材、43:保持部材、430a、430b:磁石部材保持孔、44:外周円
5:ボイスコイルモータ(VCM)
50:磁気回路部材、51:バックヨーク、52:固定ヨーク、53a、53b:駆動マグネット、54:空芯コイル、55:フレキシブル基板、
6:位置検出部材、61a、61b:センサヨーク、62a、62b:センサマグネット、7:ホール素子、
8:信号処理回路、81:定電流回路、82:増幅回路、
Claims (5)
- 光軸を中心とする円孔を有する円盤状のケーシングと、前記ケーシングの内部に、複数の絞り羽根と、前記各絞り羽根を光軸周りに回転させる動輪と、前記動輪を直接的に駆動する動輪駆動手段と、前記動輪駆動手段の位置を検出する位置検出手段とを備え、
前記動輪駆動手段は、所定間隔をおいて対向する一対の平板状ヨークと、厚さ方向に磁化され、前記平板状ヨークの少なくとも一方に固着された、希土類焼結磁石からなる駆動マグネットと、光軸と直交する面内で前記駆動マグネットに対して相対移動可能に支持される偏平な空芯コイルとを有するとともに、前記動輪は円周方向に沿って20°以上回動するように駆動され、
前記位置検出手段は、動輪に固定されたセンサマグネットとこのセンサマグネットに対向して前記ケーシングに固定された磁界検出素子を有することを特徴とするレンズ絞り駆動装置。 - 前記位置検出手段は、前記ケーシングに固定されるホール素子を有し、前記センサマグネットは、厚さ方向に磁化された直方体形状を有する一対のマグネットであり、かつ、両マグネットの一端から境界に向って前記ホール素子と対向するギャップが増加するように配置されていることを特徴とする請求項1に記載のレンズ絞り駆動装置。
- 前記各センサマグネットは、前記ホール素子の感磁面と平行な平面に対して検出用磁極面が10°〜30°の角度範囲だけ傾いて設置されることを特徴とする請求項1又は2に記載のレンズ絞り駆動装置。
- 前記センサマグネットは、光軸方向から見て、長手方向の稜線が光軸を中心とする円に接するように配置されていることを特徴とする請求項1〜3のいずれかに記載のレンズ絞り駆動装置。
- 前記駆動手段は、前記ヨークの一方は、駆動マグネットとの間に円周方向に磁気吸引力を発生するように配置されていることを特徴とする請求項1〜3のいずれかに記載のレンズ絞り駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012058061A JP2013190705A (ja) | 2012-03-15 | 2012-03-15 | 絞り羽根駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012058061A JP2013190705A (ja) | 2012-03-15 | 2012-03-15 | 絞り羽根駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013190705A true JP2013190705A (ja) | 2013-09-26 |
Family
ID=49390982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012058061A Pending JP2013190705A (ja) | 2012-03-15 | 2012-03-15 | 絞り羽根駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013190705A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150104387A (ko) * | 2014-03-05 | 2015-09-15 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| CN106320882A (zh) * | 2016-10-24 | 2017-01-11 | 北京灵铱科技有限公司 | 一种带机械限位的叶片式自动开合装置 |
| CN106437389A (zh) * | 2016-10-24 | 2017-02-22 | 北京灵铱科技有限公司 | 一种霍尔传感器限位的叶片式自动开合装置 |
| JP2017063845A (ja) * | 2015-09-28 | 2017-04-06 | オリンパス株式会社 | 光学装置、内視鏡 |
| CN111684350A (zh) * | 2019-06-26 | 2020-09-18 | 深圳市大疆创新科技有限公司 | 电机、快门装置及摄像装置 |
| KR20200118777A (ko) * | 2013-12-23 | 2020-10-16 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR20210007006A (ko) * | 2014-03-05 | 2021-01-19 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| CN112596321A (zh) * | 2020-12-23 | 2021-04-02 | 南昌欧菲光电技术有限公司 | 光圈组件、摄像模组和电子装置 |
| CN112711159A (zh) * | 2019-10-09 | 2021-04-27 | 台湾东电化股份有限公司 | 光学元件驱动机构 |
| USRE48667E1 (en) | 2014-03-05 | 2021-08-03 | Lg Innotek Co., Ltd. | Lens driving device and camera module comprising same |
| KR20210114362A (ko) * | 2020-09-28 | 2021-09-23 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR20210148989A (ko) * | 2021-01-05 | 2021-12-08 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| CN114915703A (zh) * | 2021-02-08 | 2022-08-16 | 南昌欧菲光电技术有限公司 | 一种防尘盖及移动终端 |
| CN115877633A (zh) * | 2021-09-27 | 2023-03-31 | 宁波舜宇光电信息有限公司 | 一种可变光圈组件、摄像模组及电子设备 |
| WO2023104084A1 (zh) * | 2021-12-08 | 2023-06-15 | 宁波舜宇光电信息有限公司 | 可变光圈装置以及摄像模组 |
| CN116482914A (zh) * | 2022-01-17 | 2023-07-25 | 宁波舜宇光电信息有限公司 | 可变光圈装置和摄像模组 |
| EP4266123A1 (en) * | 2022-04-22 | 2023-10-25 | Largan Precision Co. Ltd. | Imaging lens, camera module and electronic device |
| WO2026014205A1 (ja) * | 2024-07-08 | 2026-01-15 | ソニーグループ株式会社 | 撮像装置及び交換レンズ |
-
2012
- 2012-03-15 JP JP2012058061A patent/JP2013190705A/ja active Pending
Cited By (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200118777A (ko) * | 2013-12-23 | 2020-10-16 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR102301739B1 (ko) | 2013-12-23 | 2021-09-14 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| USRE48667E1 (en) | 2014-03-05 | 2021-08-03 | Lg Innotek Co., Ltd. | Lens driving device and camera module comprising same |
| KR102941368B1 (ko) | 2014-03-05 | 2026-03-20 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR20220153529A (ko) * | 2014-03-05 | 2022-11-18 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR102201258B1 (ko) * | 2014-03-05 | 2021-01-11 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR20210007006A (ko) * | 2014-03-05 | 2021-01-19 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR20150104387A (ko) * | 2014-03-05 | 2015-09-15 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR102647355B1 (ko) | 2014-03-05 | 2024-03-14 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| US11698509B2 (en) | 2014-03-05 | 2023-07-11 | Lg Innotek Co., Ltd. | Lens driving device and camera module comprising same |
| US11353679B2 (en) | 2014-03-05 | 2022-06-07 | Lg Innotek Co., Ltd. | Lens driving device and camera module comprising same |
| KR102333224B1 (ko) | 2014-03-05 | 2021-12-01 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| JP2017063845A (ja) * | 2015-09-28 | 2017-04-06 | オリンパス株式会社 | 光学装置、内視鏡 |
| CN106437389A (zh) * | 2016-10-24 | 2017-02-22 | 北京灵铱科技有限公司 | 一种霍尔传感器限位的叶片式自动开合装置 |
| CN106320882A (zh) * | 2016-10-24 | 2017-01-11 | 北京灵铱科技有限公司 | 一种带机械限位的叶片式自动开合装置 |
| EP3862810A4 (en) * | 2019-06-26 | 2021-10-13 | SZ DJI Technology Co., Ltd. | MOTOR, SHUTTER DEVICE AND PHOTOGRAPHY DEVICE |
| CN111684350B (zh) * | 2019-06-26 | 2022-05-17 | 深圳市大疆创新科技有限公司 | 电机、快门装置及摄像装置 |
| CN111684350A (zh) * | 2019-06-26 | 2020-09-18 | 深圳市大疆创新科技有限公司 | 电机、快门装置及摄像装置 |
| CN112711159A (zh) * | 2019-10-09 | 2021-04-27 | 台湾东电化股份有限公司 | 光学元件驱动机构 |
| KR20210114362A (ko) * | 2020-09-28 | 2021-09-23 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR102712760B1 (ko) | 2020-09-28 | 2024-10-04 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR102489147B1 (ko) | 2020-09-28 | 2023-01-18 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| KR20230014095A (ko) * | 2020-09-28 | 2023-01-27 | 엘지이노텍 주식회사 | 렌즈구동모터 |
| CN112596321A (zh) * | 2020-12-23 | 2021-04-02 | 南昌欧菲光电技术有限公司 | 光圈组件、摄像模组和电子装置 |
| KR102462343B1 (ko) | 2021-01-05 | 2022-11-03 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| KR20210148989A (ko) * | 2021-01-05 | 2021-12-08 | 엘지이노텍 주식회사 | 렌즈 구동장치 및 이를 구비한 카메라 모듈 |
| CN114915703A (zh) * | 2021-02-08 | 2022-08-16 | 南昌欧菲光电技术有限公司 | 一种防尘盖及移动终端 |
| CN115877633A (zh) * | 2021-09-27 | 2023-03-31 | 宁波舜宇光电信息有限公司 | 一种可变光圈组件、摄像模组及电子设备 |
| WO2023104084A1 (zh) * | 2021-12-08 | 2023-06-15 | 宁波舜宇光电信息有限公司 | 可变光圈装置以及摄像模组 |
| CN116482914A (zh) * | 2022-01-17 | 2023-07-25 | 宁波舜宇光电信息有限公司 | 可变光圈装置和摄像模组 |
| EP4266123A1 (en) * | 2022-04-22 | 2023-10-25 | Largan Precision Co. Ltd. | Imaging lens, camera module and electronic device |
| CN116991017A (zh) * | 2022-04-22 | 2023-11-03 | 大立光电股份有限公司 | 成像镜头、相机模块及电子装置 |
| US12216396B2 (en) | 2022-04-22 | 2025-02-04 | Largan Precision Co., Ltd. | Imaging lens, camera module and electronic device |
| WO2026014205A1 (ja) * | 2024-07-08 | 2026-01-15 | ソニーグループ株式会社 | 撮像装置及び交換レンズ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013190705A (ja) | 絞り羽根駆動装置 | |
| US8475064B2 (en) | Camera blade drive device | |
| JP4849516B2 (ja) | 駆動装置及び光量調節装置 | |
| JP2012068339A (ja) | 位置検出センサ及びレンズ駆動装置 | |
| JP4636658B2 (ja) | 光量調整装置 | |
| JP2006333606A (ja) | 電磁駆動装置及びこれを用いた光量調整装置 | |
| JP4378326B2 (ja) | 駆動装置及び光量調節装置 | |
| JP3963900B2 (ja) | 電磁駆動装置及びこれを用いた光量調節装置 | |
| US4558937A (en) | Electromagnetic blade mechanism | |
| JP2016144257A (ja) | 磁石装置 | |
| US4731778A (en) | Electro-magnetic drive unit comprising a pivotable armature | |
| JP3740381B2 (ja) | 電磁アクチュエータ | |
| JP2004258062A (ja) | 絞り兼用シャッタ駆動装置 | |
| JPH0819239A (ja) | カメラの自動絞り装置、及び、駆動モータ | |
| JP2015038527A (ja) | 位置検出装置 | |
| JP2004320932A (ja) | 電磁式アクチュータ及びこれを用いた露光量調節部材 | |
| JPS5852536Y2 (ja) | 可動鉄片形計器 | |
| JP4057026B2 (ja) | 駆動装置及びその組立装置 | |
| JP2004007882A (ja) | レーダ駆動用電磁アクチュエータ | |
| JPH09106314A (ja) | 駆動装置およびそれを用いた光学機器 | |
| JP3469981B2 (ja) | 光量調節装置および光学機器 | |
| JPH0279209A (ja) | 磁気ヘッド移動装置 | |
| JPS61172125A (ja) | カメラ用絞り装置 | |
| JP2016212203A (ja) | 手振れ補正装置 | |
| JPH09100739A (ja) | アクチュエータ |