JP2013192590A - 運動解析装置及び運動解析方法 - Google Patents
運動解析装置及び運動解析方法 Download PDFInfo
- Publication number
- JP2013192590A JP2013192590A JP2012059817A JP2012059817A JP2013192590A JP 2013192590 A JP2013192590 A JP 2013192590A JP 2012059817 A JP2012059817 A JP 2012059817A JP 2012059817 A JP2012059817 A JP 2012059817A JP 2013192590 A JP2013192590 A JP 2013192590A
- Authority
- JP
- Japan
- Prior art keywords
- bias
- angular velocity
- period
- value
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004458 analytical method Methods 0.000 title claims abstract description 61
- 238000005259 measurement Methods 0.000 claims abstract description 33
- 238000012937 correction Methods 0.000 claims abstract description 24
- 230000001133 acceleration Effects 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 12
- 230000008569 process Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 11
- 238000005070 sampling Methods 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 7
- 230000000052 comparative effect Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000012886 linear function Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images









Landscapes
- Gyroscopes (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】 運動解析装置1は、測定対象物体10の角速度を検出する角速度センサー102x〜102zと、測定対象物体が静止状態である第1期間T1に角速度センサーから取得された出力信号に基づいて、角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部202と、第1期間に続く第2期間T2に角速度センサーから取得された出力信号から、その出力信号と時間軸上で対応するバイアス推定値が除去された補正データに基づいて、測定対象物体の運動を解析する運動解析部204と、を有する。
【選択図】 図5
Description
測定対象物体の角速度を検出する角速度センサーと、
前記測定対象物体が静止状態である第1期間に前記角速度センサーから取得された出力信号に基づいて、前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部と、
前記第1期間に続く第2期間に前記角速度センサーから取得された出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する運動解析部と、
を有する運動解析装置に関する。
前記測定対象物体の加速度を検出する加速度センサーをさらに有し、
前記運動解析部は、前記加速度センサーの出力信号及び記加速度センサーの出力信号のm(mは自然数)階積分値に基づいて前記測定対象物体の運動を解析することができる。
測定対象物体が静止状態である第1期間に、前記測定対象物体に取り付けられた角速度センサーからの出力信号を取得する工程と、
前記第1期間に取得された前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求める工程と、
前記第1期間に続く第2期間に前記角速度センサーの出力信号を取得する工程と、
前記第2期間に取得された前記角速度センサーの出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する工程と、
を有する運動解析方法に関する。
運動解析情報収集装置100は、図1に示すように、測定対象物体である例えばゴルフクラブ10に取り付けられた角速度センサーを含むセンサーユニット20と、バイアス推定部及び運動解析部とを含むホスト端末200とを有する。
ここで、運動解析装置1の運動解析情報の対象は、図1に示す被験者により操作されるゴルフクラブ10である。図1は、被験者により操作されるゴルフクラブ10のクラブヘッド11のスイング軌跡Aを示している。スイング軌跡Aは、スイング起動位置P1、トップ位置P2、インパクト位置P3及びフォロースルートップ位置P4を含んでいる。
図5はホスト端末200を示している。ホスト端末200は、処理部(CPU)201、通信部210、操作部220、ROM230、RAM240、不揮発性メモリー250、表示部260及び告知部270を含んで構成されている。
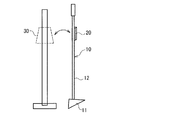
以下、運動解析方法を図6〜図10も参照して説明する。図6のスタート時には、ゴルフクラブ10は図4に示す充電器30に装着され静止状態である。このとき、センサーユニット20は、図7に示す既知の始点P0(充電器30の位置)にあり、加速度及び角速度は共に零である。これらは、始点P0での既知のデータとなる。
図8のステップS1では、図8のスタート時t0から、ゴルフクラブ10が充電器30に装着されている静止状態でのセンサーユニット20から出力信号を取得する。つまり、図8のスタート時t0から、静止状態にてセンサー出力データを所定のサンプリング周波数でサンプリングして取得する。特に、三軸ジャイロセンサー104x〜104zから、例えばサンプリング時刻情報と共に角速度データが取得される。この静止状態では角速度は零であるが、取得された角速度データは零ではなく、時間とともに変化するバイアス値が含まれている。
Vias(t)=a×t+b…(1)
と表すことができる。バイアス推定値Vias(t)は、X,Y,Z軸についてそれぞれ求められる。
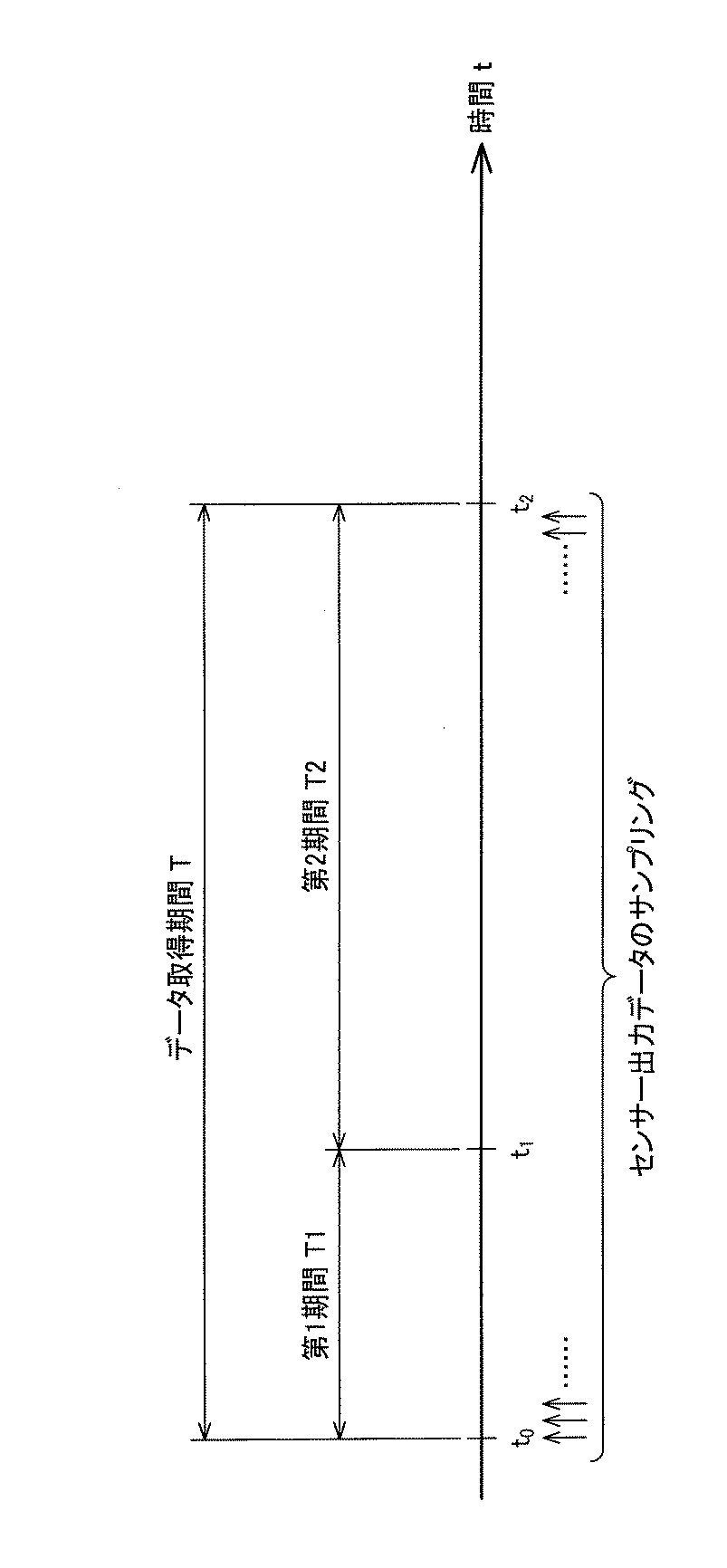
図10(A) −0.0008 −0.0013 −0.0008
図10(B) −0.0448 −0.0008 +0.0147
図10(C) −0.0120 −0.0073 +0.0010
図10(D) +0.0001 +0.0029 −0.0032
図10(A)〜図10(D)にて求められたバイアス推定値の式(1)の傾きaを評価すると、図10(C)(D)が有効である場合にはa≦0.010とすることができる。この場合、図(B)に示すように1秒の静止期間で得られたバイアス推定値は不採用となり、図10(C)に示すように静止期間を2秒として得られたバイアス推定値が確定値となる。しきい値をこのように設定すると、図10(A)に示すように運動期間の前後に静止期間を設けて得られた比較例のバイアス推定値に近いバイアス推定値を得ることができる。
図8のステップS4では、図5に示す告知部270が、バイアス推定部202にてバイアス推定値が確定された時以降に、運動開始を告知することができる。この告知は、表示または音声にて行なうことができる。
Claims (10)
- 測定対象物体の角速度を検出する角速度センサーと、
前記測定対象物体が静止状態である第1期間に前記角速度センサーから取得された出力信号に基づいて、前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部と、
前記第1期間に続く第2期間に前記角速度センサーから取得された出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する運動解析部と、
を有することを特徴とする運動解析装置。 - 請求項1において、
前記バイアス推定部は、前記角速度センサーからの出力信号として時間軸上でサンプリングされたデータを、前記時間軸を含む二次元面で直線近似して、前記バイアス推定値を求めることを特徴とする運動解析装置。 - 請求項2において、
一秒あたりの角速度(dps)であるバイアス推定値Vias(t)の直線近似式を、Vias(t)=a×t+bとしたとき、前記バイアス推定部は、傾きaがしきい値よりも小さくなった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 - 請求項3において、
前記バイアス推定部は、前記傾きaがa≦0.010となった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 - 請求項3において、
前記バイアス推定部は、前記傾きaがa≦0.005となった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 - 請求項3乃至5のいずれか一項において、
前記バイアス推定部にて前記バイアス推定値が確定された時以降に、運動開始を告知する告知部をさらに有することを特徴とする運動解析装置。 - 請求項1乃至6のいずれか一項において、
前記運動解析部は、前記補正データ及び前記補正データの積分値に基づいて前記測定対象物体の運動を解析することを特徴とする運動解析装置。 - 請求項7において、
前記運動解析部は、前記角速度センサーの出力信号が入力される順にリアルタイムで前記測定対象物体の運動を解析することを特徴とする運動解析装置。 - 請求項1乃至8のいずれか一項において、
前記測定対象物体の加速度を検出する加速度センサーをさらに有し、
前記運動解析部は、前記加速度センサーの出力信号及び記加速度センサーの出力信号のm(mは自然数)階積分値に基づいて前記測定対象物体の運動を解析することを特徴とする運動解析装置。 - 測定対象物体が静止状態である第1期間に、前記測定対象物体に取り付けられた角速度センサーからの出力信号を取得する工程と、
前記第1期間に取得された前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求める工程と、
前記第1期間に続く第2期間に前記角速度センサーの出力信号を取得する工程と、
前記第2期間に取得された前記角速度センサーの出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する工程と、
を有することを特徴とする運動解析方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012059817A JP6074897B2 (ja) | 2012-03-16 | 2012-03-16 | 運動解析装置及び運動解析方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012059817A JP6074897B2 (ja) | 2012-03-16 | 2012-03-16 | 運動解析装置及び運動解析方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013192590A true JP2013192590A (ja) | 2013-09-30 |
| JP2013192590A5 JP2013192590A5 (ja) | 2015-04-30 |
| JP6074897B2 JP6074897B2 (ja) | 2017-02-08 |
Family
ID=49392272
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012059817A Expired - Fee Related JP6074897B2 (ja) | 2012-03-16 | 2012-03-16 | 運動解析装置及び運動解析方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6074897B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016144733A (ja) * | 2016-05-18 | 2016-08-12 | 株式会社Access | モーションセンサを用いたスイング解析システム、スイング解析方法、およびスイング解析プログラム |
| JP2017119102A (ja) * | 2015-12-28 | 2017-07-06 | 住友ゴム工業株式会社 | 運動解析装置、方法及びプログラム |
| CN107408151A (zh) * | 2015-03-27 | 2017-11-28 | 英特尔公司 | 使用电子设备的运动跟踪 |
| JP2019054845A (ja) * | 2017-09-19 | 2019-04-11 | 住友ゴム工業株式会社 | 弾性体の挙動の解析装置 |
| JP2021105618A (ja) * | 2018-03-08 | 2021-07-26 | セイコーエプソン株式会社 | 慣性計測装置、移動体測位装置、システム、及び移動体 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295072A (ja) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | 方位計 |
| JP2001242192A (ja) * | 2000-02-25 | 2001-09-07 | Japan Aviation Electronics Industry Ltd | 動体運動測定装置 |
| JP2007155583A (ja) * | 2005-12-07 | 2007-06-21 | Tamagawa Seiki Co Ltd | 孔路計測方法及び装置 |
| JP2009121957A (ja) * | 2007-11-15 | 2009-06-04 | Hitachi Ltd | ナビゲーション装置および角速度検出信号補正値算出方法 |
| JP2009192462A (ja) * | 2008-02-18 | 2009-08-27 | Seiko Epson Corp | 測位方法、プログラム及び測位装置 |
| JP2011059020A (ja) * | 2009-09-11 | 2011-03-24 | Chiba Inst Of Technology | 三次元姿勢推定装置、三次元姿勢推定方法及び三次元姿勢推定プログラム |
| JP2011142927A (ja) * | 2009-09-29 | 2011-07-28 | Univ Of Tsukuba | バット選択システム及びそのセンサーバット |
| WO2011123149A1 (en) * | 2010-03-30 | 2011-10-06 | Apple Inc. | Calibrating sensor measurements on mobile devices |
-
2012
- 2012-03-16 JP JP2012059817A patent/JP6074897B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295072A (ja) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | 方位計 |
| JP2001242192A (ja) * | 2000-02-25 | 2001-09-07 | Japan Aviation Electronics Industry Ltd | 動体運動測定装置 |
| JP2007155583A (ja) * | 2005-12-07 | 2007-06-21 | Tamagawa Seiki Co Ltd | 孔路計測方法及び装置 |
| JP2009121957A (ja) * | 2007-11-15 | 2009-06-04 | Hitachi Ltd | ナビゲーション装置および角速度検出信号補正値算出方法 |
| JP2009192462A (ja) * | 2008-02-18 | 2009-08-27 | Seiko Epson Corp | 測位方法、プログラム及び測位装置 |
| JP2011059020A (ja) * | 2009-09-11 | 2011-03-24 | Chiba Inst Of Technology | 三次元姿勢推定装置、三次元姿勢推定方法及び三次元姿勢推定プログラム |
| JP2011142927A (ja) * | 2009-09-29 | 2011-07-28 | Univ Of Tsukuba | バット選択システム及びそのセンサーバット |
| WO2011123149A1 (en) * | 2010-03-30 | 2011-10-06 | Apple Inc. | Calibrating sensor measurements on mobile devices |
| JP2013527915A (ja) * | 2010-03-30 | 2013-07-04 | アップル インコーポレイテッド | モバイル機器でのセンサ測定値の較正 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107408151A (zh) * | 2015-03-27 | 2017-11-28 | 英特尔公司 | 使用电子设备的运动跟踪 |
| EP3274791A4 (en) * | 2015-03-27 | 2018-10-31 | Intel Corporation | Motion tracking using electronic devices |
| US10799118B2 (en) | 2015-03-27 | 2020-10-13 | Intel Corporation | Motion tracking using electronic devices |
| JP2017119102A (ja) * | 2015-12-28 | 2017-07-06 | 住友ゴム工業株式会社 | 運動解析装置、方法及びプログラム |
| JP2016144733A (ja) * | 2016-05-18 | 2016-08-12 | 株式会社Access | モーションセンサを用いたスイング解析システム、スイング解析方法、およびスイング解析プログラム |
| JP2019054845A (ja) * | 2017-09-19 | 2019-04-11 | 住友ゴム工業株式会社 | 弾性体の挙動の解析装置 |
| JP2021105618A (ja) * | 2018-03-08 | 2021-07-26 | セイコーエプソン株式会社 | 慣性計測装置、移動体測位装置、システム、及び移動体 |
| JP7092229B2 (ja) | 2018-03-08 | 2022-06-28 | セイコーエプソン株式会社 | 慣性計測装置、移動体測位装置、システム、及び移動体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6074897B2 (ja) | 2017-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5915148B2 (ja) | 運動解析方法及び運動解析装置 | |
| JP5948011B2 (ja) | 運動解析装置 | |
| JP5790914B2 (ja) | 変形量算出装置及び変形量算出方法 | |
| JP5773144B2 (ja) | 運動解析装置、運動解析システム、運動解析プログラム、および、記録媒体 | |
| US9604101B2 (en) | Golf swing analysis device and golf swing analysis method | |
| JP5761506B2 (ja) | スイング分析装置、スイング分析システム、スイング分析方法、スイング分析プログラム、および記録媒体 | |
| JP2013202066A (ja) | 運動解析装置 | |
| JP5912415B2 (ja) | ゴルフスイング解析装置およびゴルフスイング解析方法 | |
| JP6168276B2 (ja) | 解析制御装置、運動解析システム、プログラム、記録媒体および運動解析方法 | |
| KR20140044754A (ko) | 골프스윙 해석장치 및 골프스윙 해석방법 | |
| JP6074897B2 (ja) | 運動解析装置及び運動解析方法 | |
| JP2015156882A (ja) | 運動解析装置及び運動解析システム | |
| EP3120901A1 (en) | Movement analysis method, movement analysis device, movement analysis system and program | |
| JP5773122B2 (ja) | スイング分析装置及びスイング分析プログラム | |
| JP2016067410A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| JP2017029516A (ja) | ゴルフスイング解析装置 | |
| JP2013192591A (ja) | 運動解析情報収集装置、運動解析装置及び運動解析方法 | |
| WO2014125790A1 (en) | Motion analysis system and azimuth tuning method | |
| CN108211302B (zh) | 运动解析装置、运动解析方法以及存储介质 | |
| JP2015100567A (ja) | 方位角キャリブレーション方法、運動解析装置、および方位角キャリブレーションプログラム | |
| US20170004729A1 (en) | Motion analysis method, motion analysis apparatus, motion analysis system, and program | |
| US20170011652A1 (en) | Motion analysis method, motion analysis apparatus, motion analysis system, and program | |
| JP6300196B2 (ja) | 運動具挙動解析装置、運動具挙動解析方法および運動具挙動解析プログラム | |
| JP6268897B2 (ja) | 運動解析方法、運動解析プログラム、および運動解析装置 | |
| JP7005987B2 (ja) | ゴルフスイング表示システム、情報処理装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160809 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6074897 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |