JP2013196675A - 位置検出装置 - Google Patents
位置検出装置 Download PDFInfo
- Publication number
- JP2013196675A JP2013196675A JP2012066748A JP2012066748A JP2013196675A JP 2013196675 A JP2013196675 A JP 2013196675A JP 2012066748 A JP2012066748 A JP 2012066748A JP 2012066748 A JP2012066748 A JP 2012066748A JP 2013196675 A JP2013196675 A JP 2013196675A
- Authority
- JP
- Japan
- Prior art keywords
- electrodes
- electrode
- selection
- circuit
- indicator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/04166—Details of scanning methods, e.g. sampling time, grouping of sub areas or time sharing with display driving
- G06F3/041661—Details of scanning methods, e.g. sampling time, grouping of sub areas or time sharing with display driving using detection at multiple resolutions, e.g. coarse and fine scanning; using detection within a limited area, e.g. object tracking window
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/038—Control and interface arrangements therefor, e.g. drivers or device-embedded control circuitry
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/0418—Control or interface arrangements specially adapted for digitisers for error correction or compensation, e.g. based on parallax, calibration or alignment
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/0418—Control or interface arrangements specially adapted for digitisers for error correction or compensation, e.g. based on parallax, calibration or alignment
- G06F3/04182—Filtering of noise external to the device and not generated by digitiser components
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0443—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a single layer of sensing electrodes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0446—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a grid-like structure of electrodes in at least two directions, e.g. using row and column electrodes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04104—Multi-touch detection in digitiser, i.e. details about the simultaneous detection of a plurality of touching locations, e.g. multiple fingers or pen and finger
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04106—Multi-sensing digitiser, i.e. digitiser using at least two different sensing technologies simultaneously or alternatively, e.g. for detecting pen and finger, for saving power or for improving position detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/048—Indexing scheme relating to G06F3/048
- G06F2203/04808—Several contacts: gestures triggering a specific function, e.g. scrolling, zooming, right-click, when the user establishes several contacts with the surface simultaneously; e.g. using several fingers or a combination of fingers and pen
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Input By Displaying (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
【解決手段】第1の方向に配置された複数の第1の電極と、第1の方向に対して交差する第2の方向に配置された複数の第2の電極とからなる電極パターンを有するセンサを備える。複数の第1の電極の中から所定本数分の間隔を空けた2セットの第1の電極を選択し、互いに位相の反転した2つの駆動信号を供給する。複数の第2の電極の中から所定本数分の間隔を空けた2セットの第2の電極を選択し、選択された2セットの第2の電極を、差動増幅回路の2つの差動入力に接続する。2セットの第1の電極と2セットの第2の電極とが形成する4つの交点のうち、1点のみが指示体の指示位置となるように、2セットの第1の電極と2セットの第2の電極とを選択制御する。
【選択図】図13
Description
第1の方向に配列された複数の第1の電極と、前記第1の方向に対して交差する第2の方向に配列された複数の第2の電極とからなる電極パターンを有するセンサを備え、前記第1の電極に駆動信号を供給すると共に、前記第2の電極から得られる受信信号から、指示体の前記電極パターン上の位置を検出する位置検出装置において、
前記複数の第1の電極から、第1の所定本数分の間隔を空けた2セットの前記第1の電極を選択するための第1の選択回路と、
前記複数の第2の電極から、第2の所定本数分の間隔を空けた2セットの前記第2の電極を選択するための第2の選択回路と、
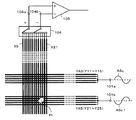
前記第1の選択回路で選択された前記2セットの前記第1の電極に駆動信号をそれぞれ供給するための、互いに位相が反転した2つの信号を出力する駆動信号供給回路と、
前記第2の選択回路で選択された前記2セットの前記第2の電極の一方のセットが非反転入力端子に接続され、前記2セットの前記第2の電極の他方のセットが反転入力端子に接続される差動増幅回路と、
前記差動増幅回路の出力信号から、前記電極パターンにおける前記指示体の位置を検出するための検出回路と、
を備える位置検出装置を提供する。
前記検出回路で、複数個の指示体の位置が検出されたときに、前記第1および第2の選択回路によって選択される各2セットの電極が形成する4つの交点のうち1点のみが前記指示体の近傍となるように、前記第1および第2の選択回路による選択を制御し、かつ、前記第1および第2の所定本数をそれぞれ決定する、制御回路を備える位置検出装置を提供する。
第1の方向に配置された複数の第1の電極と、前記第1の方向に対して交差する第2の方向に配置された複数の第2の電極とからなる格子状の電極パターンを有するセンサを備え、前記第1の電極に駆動信号を供給すると共に、前記複数の第2の電極から得られる受信信号から、指示体の前記電極パターン上の位置を検出する位置検出装置において、
所定の駆動信号を前記複数の第1の電極に供給するための駆動信号供給回路と、
前記複数の第2の電極から、所定本数分の間隔を空けた2セットの前記第2の電極を選択するための第1の選択回路と、
前記第1の選択回路で選択された前記2セットの前記第2の電極の一方のセットが非反転入力端子に接続され、前記2セットの前記第2の電極の他方のセットが反転入力端子に接続される差動増幅回路と、
前記差動増幅回路の出力信号から、前記電極パターンにおける前記指示体の位置を検出するための検出回路と、
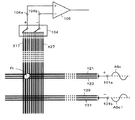
前記検出回路で、複数個の指示体の位置が検出されたときに、検出された前記指示体の複数の位置情報に基づいて、前記差動増幅回路の前記非反転入力端子および反転入力端子の一方に前記指示体の検出位置の前記第2の電極からの信号が供給されているときに、前記非反転入力端子および反転入力端子の他方には、前記指示体の検出位置以外の第2の電極からの信号が供給されるように前記2セットの前記第2の電極を選択する第1選択制御を、前記第1の選択回路に対して行う制御回路と、
を備える位置検出装置を提供する。
次に、以上のように構成した、この発明の位置検出装置の実施形態としてのタブレット装置1の動作を説明する。なお、指示体は、指だけでなく、ペン形状の位置指示器を用いることも可能であるが、以下の説明においては、指示体は主として指の場合として説明する。
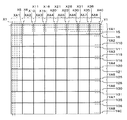
この実施形態では、この例のタブレット装置1の制御回路109は、全面スキャン動作を高速に行うために、Y軸方向に配列された第1の透明電極群13を、複数個、この例では8個の領域に分けて、一つの領域内の複数本(この例では5本となる)のY軸電極を同時に選択するようにする。また、X軸方向に配列された第2の透明電極群14についても、複数個、この例では8個の領域に分けて、一つの領域内の複数本(この例では5本となる)のX軸電極を同時に選択するようにする。図4は、この全面スキャン動作における領域分割の様子を示した図である。
前述したような全面スキャン動作によって、制御回路109は、指が置かれたおおよその位置を求めることができる。次に、制御回路109は、指の詳細な位置を求めるために、部分スキャン動作を行う。この部分スキャン動作は、X軸方向の指の位置(指による指示位置)を求めるX軸部分スキャン動作と、Y軸方向の指の位置を求めるY軸部分スキャン動作とからなり、両動作を順次に行う。なお、この部分スキャン動作においても、前述した全面スキャン動作の場合と同様にして、選択回路101および104は、選択した電極番号の少ない方を+側選択端子101aおよび104a、電極番号の多い方を−側選択端子101bおよび104bのそれぞれに接続する場合として説明を行う。
X軸部分スキャン動作においては、全面スキャン動作により検出された、指が置かれた位置を含む領域におけるX軸方向の精細な位置座標を求める。このX軸部分スキャン動作を、図6において、B領域に、指示体としての指が置かれた場合について、図7および図8を参照しながら説明する。
CX=Px+(DX/2)*(VR−VL)/(2*VP−VR−VL)
・・・(式1)
となる。上式において、Pxはピークレベルが検出された電極(ここではX軸電極X19)の座標、DXはX軸電極の配列間隔を表している。
前述したX軸部分スキャン動作によって、指示体の指示位置のX座標が求まったら、次は、指示体の指示位置のY座標を求めるためのY軸部分スキャン動作に移行する。このY軸部分スキャン動作を、図6において、B領域に、指示体としての指が置かれた場合について、図10および図11を参照しながら説明する。
CY=Py+(DY/2)*(VR−VL)/(2*VP−VR−VL)
・・・(式2)
となる。上式において、Pyはピークレベルが検出された電極(ここではY軸電極Y22)の座標、DYはY軸電極の配列間隔を表している。
以上説明したX軸部分スキャン動作およびY軸部分スキャン動作により正確な指示座標が求まると、制御回路109は、指示体による指示位置の移動を追跡するための追跡スキャン動作を継続して行う。
このY軸追跡スキャン動作における追跡領域の大きさは、X軸追跡スキャン動作の場合と同様に選定されて、検出された指示体のY座標CYを中心にした複数本、この例では5本とする。
<X軸追跡スキャン動作の流れの例>
以上説明した追跡スキャン動作のうち、まず、X軸追跡スキャン動作の流れの例を、図18〜図21のフローチャートを参照しながら以下に説明する。このX軸追跡スキャン動作は、指の指示位置が複数個存在するときには、それぞれ毎に、繰り返し実行される。なお、以下の説明においては、説明の簡略化のために、この明細書では、選択回路101の+側選択端子および−側選択端子に供給される駆動回路13の正相および逆相の駆動信号を、差動出力と呼び、また、選択回路104の+側選択端子および−側選択端子からの2出力を接続する、差動増幅回路105の+側入力端子および−側入力端子を、差動入力と呼ぶことにする。
次に、Y軸追跡スキャン動作の流れの例を、図22〜図23のフローチャートを参照しながら以下に説明する。このY軸追跡スキャン動作も、指の指示位置が複数個存在するときには、それぞれ毎に、繰り返し実行される。なお、このY軸追跡スキャン動作の説明において、前述の図18〜図21を用いて説明したX軸追跡スキャン動作と同様の動作部分は、図18〜図21におけるステップの参照番号を用いた説明とすることで簡略化する。
次に、この例のタブレット装置1の全体の処理の流れを、図24のフローチャートを参照しながら説明する。以下に説明する例においては、タブレット装置1は10個の指示体を同時に検出することができる場合としている。
以上説明したように、上述の実施形態の追跡スキャン動作においては、位置検出センサ10の検出面に、複数の指が置かれても、選択回路101の+側選択端子と−側選択端子に接続される2セットのY軸電極と、選択回路104の+側選択端子と−側選択端子に接続される2セットのX軸電極により形成する4点のうち、1点のみに指の指示位置の電極が選択されるように、選択回路101および104を選択制御することにより、複数の指が互いに影響することなく、各点の位置を追跡して正確に求めることができる。
上述の実施形態では、Y軸電極に駆動信号を供給し、X軸電極を受信電極とするようにしたが、X軸電極に駆動信号を供給し、Y軸電極を受信電極とするようにしてもよい。
Claims (13)
- 第1の方向に配列された複数の第1の電極と、前記第1の方向に対して交差する第2の方向に配列された複数の第2の電極とからなる電極パターンを有するセンサを備え、前記第1の電極に駆動信号を供給すると共に、前記第2の電極から得られる受信信号から、指示体の前記電極パターン上の位置を検出する位置検出装置において、
前記複数の第1の電極から、第1の所定本数分の間隔を空けた2セットの前記第1の電極を選択するための第1の選択回路と、
前記複数の第2の電極から、第2の所定本数分の間隔を空けた2セットの前記第2の電極を選択するための第2の選択回路と、
前記第1の選択回路で選択された前記2セットの前記第1の電極に駆動信号をそれぞれ供給するための、互いに位相が反転した2つの信号を出力する駆動信号供給回路と、
前記第2の選択回路で選択された前記2セットの前記第2の電極の一方のセットが非反転入力端子に接続され、前記2セットの前記第2の電極の他方のセットが反転入力端子に接続される差動増幅回路と、
前記差動増幅回路の出力信号から、前記電極パターンにおける前記指示体の位置を検出するための検出回路と、
を備える位置検出装置。 - 前記検出回路で、複数の指示体の位置が検出されたときに、前記第1および第2の選択回路によって選択される各2セットの電極が形成する4つの交点のうち1点のみが前記指示体の位置の近傍となるように、前記第1および第2の選択回路による選択を行い、かつ、前記第1および第2の所定本数をそれぞれ決定する制御回路とを備えた、
ことを特徴とする請求項1に記載の位置検出装置。 - 前記第1の選択回路及び前記第2の選択回路によって選択される2セットの電極は各々のセットに複数本の電極が含まれ、前記第1の選択回路及び前記第2の選択回路によって各セットに含まれる複数本の電極が同時に前記駆動回路及び前記差動増幅回路に接続されることにより、指示体の概略位置を検出する
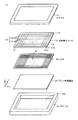
ことを特徴とする請求項1に記載の位置検出装置。 - 前記第1の電極および前記第2の電極は、透明電極からなり、前記センサは透明基材に前記電極パターンを形成した
ことを特徴とする請求項1に記載の位置検出装置。 - 前記センサは、表示装置の表示面の上に設けられている
ことを特徴とする請求項4に記載の位置検出装置。 - 第1の方向に配置された複数の第1の電極と、前記第1の方向に対して交差する第2の方向に配置された複数の第2の電極とからなる格子状の電極パターンを有するセンサを備え、前記第1の電極に送信信号を供給すると共に、前記複数の第2の電極から得られる受信信号から、指示体の前記電極パターン上の位置を検出する位置検出装置において、
所定の駆動信号を前記第1の電極に供給するための駆動信号供給回路と、
前記複数の第2の電極から、所定本数分の間隔を空けた2セットの前記第2の電極を選択するための第1の選択回路と、
前記駆動信号を供給する前記第1の電極を選択するための第2の選択回路と、
前記2セットの前記第2の電極の一方のセットが非反転入力端子に接続され、他方のセットが反転入力端子に接続される差動増幅回路と、
前記差動増幅回路の出力信号から、前記電極パターンにおける前記指示体の位置を検出するための検出回路と、
前記検出回路で、複数個の指示体の位置が検出されたときに、検出された前記指示体の複数の位置情報に基づいて、前記差動増幅回路の前記非反転入力端子および反転入力端子の一方の端子に前記指示体の検出位置の前記第2の電極からの信号が供給されているときに、他方の端子には、前記指示体の検出位置以外の第2の電極からの信号が供給されるように前記2セットの前記第2の電極を選択する第1選択制御を、前記第1の選択回路に対して行う制御回路と、
を備える位置検出装置。 - 前記制御回路は、前記第1の選択回路の前記第1選択制御において、2セットの前記第2の電極を選択する際における前記所定本数分の間隔を変えることにより、前記差動増幅回路の前記非反転入力端子および反転入力端子の一方の端子に、前記指示体の検出位置の前記第2の電極からの信号が供給されているときに、他方の端子には、前記指示体の検出位置以外の第2の電極からの信号が供給されるように制御する
ことを特徴とする請求項6に記載の位置検出装置。 - 前記駆動信号は、互いに逆相の2つの信号とされ、
前記第2の選択回路は、前記制御回路により、前記複数の第1の電極から、所定本数分の間隔を空けた2セットの前記第1の電極を選択するように制御がなされ、
前記駆動信号の互いに逆相の2つの信号の一方の信号が、前記第2の選択回路で選択された前記2セットの前記第1の電極の一方のセットに、他方の信号が、前記2セットの第1の電極の他方のセットに、それぞれ供給され、
前記制御回路は、前記指示体の複数の位置情報に基づいて、前記駆動信号の互いに逆相の2つの信号の内の一方の信号が、前記指示体の検出位置の前記第1の電極に供給されているときに、他方の信号が、前記指示体の検出位置以外の前記第1の電極に供給されるように、前記2セットの前記第1の電極を選択する第2選択制御を、前記第2の選択回路に対して行う
ことを特徴とする請求項6に記載の位置検出装置。 - 前記制御回路は、前記第2の選択回路の前記第2選択制御において、前記2セットの前記第1の電極を選択する際における前記所定本数分の間隔を変えることにより、前記駆動信号の互いに逆相の2つの信号の内の一方の信号が、前記指示体の検出位置の前記第1の電極に供給されているときに、他方の信号が、前記指示体の検出位置以外の前記第1の電極に供給されるように制御する
ことを特徴とする請求項8に記載の位置検出装置。 - 前記制御回路は、
前記第1の選択回路における前記2セットの前記第2の電極の選択を制御し、前記第2の選択回路における前記2セットの前記第1の電極の選択を制御することにより、前記格子状の電極パターンの領域について指示体の位置の検出をする第1の検出処理を行うと共に、
前記第1の検出処理で指示体が検出されたときに、前記指示体が検出された位置を中心とした部分領域に含まれる複数本の第2の電極の1本ずつを前記第2の電極の一方のセットとし、他方のセットを、前記一方のセットの第2の電極から所定本数分の間隔を空けた1本の第2の電極とするように、前記第1の選択回路における前記2セットの前記第2の電極の選択を制御することにより、前記部分領域についての指示体の位置の検出をする第2の検出処理を行うように制御し、
前記第2の検出処理においてのみ、前記第1選択制御を前記第1の選択回路に対して行うと共に、前記第1の検出処理と前記第2の検出処理とを交互に繰り返す
ことを特徴とする請求項6に記載の位置検出装置。 - 前記制御回路は、
前記第1の検出処理を行い、更に、前記第2の検出処理行った後、
前記指示体が検出された位置を中心とした部分領域に含まれる複数本の第1の電極の1本ずつを前記第1の電極の一方のセットとし、他方のセットを、前記一方のセットの第1の電極から所定本数分の間隔を空けた1本の第1の電極とするように、前記第2の選択回路における前記2セットの前記第1の電極の選択を制御することにより、前記部分領域についての指示体の第2の方向の位置の検出をする第3の検出処理を行うように制御し、
前記第3の検出処理においてのみ、前記第2選択制御を前記第2の選択回路に対して行う
ことを特徴とする請求項10に記載の位置検出装置。 - 前記制御回路は、前記第1の検出処理においては、
前記第1の選択回路を、前記複数個の第2の電極のうちの、隣接する複数個の第2の電極からなる第1の組を前記2セットの一方のセットとし、前記第1の組の第2の電極とは、所定本数分の間隔を空けた位置の隣接する複数個の第2の電極の第2の組を前記2セットの他方のセットとして選択する第2選択制御を行って、前記隣接する複数個の第2の電極の組単位の前記指示体の位置を検出する粗処理をすると共に、
前記粗処理で前記指示体を検出したときに、前記第1の選択回路を、検出された指示体の位置を含む前記隣接する複数個の第2の電極の組からの一本ずつの第2の電極を前記2セットの一方のセットとし、前記一方のセットの第2の電極とは、所定本数分の間隔を空けた1本ずつの第2の電極を前記2セットの他方として選択する第3選択制御を行って、第2の電極の1本単位の前記指示体の位置を検出する精細処理を行う
ことを特徴とする請求項10に記載の位置検出装置。 - 前記電極パターンと前記指示体との間の静電容量の変化を検出することにより指示体の前記電極パターン上の位置を検出する
ことを特徴とする請求項6に記載の位置検出装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012066748A JP5912727B2 (ja) | 2012-03-23 | 2012-03-23 | 位置検出装置 |
| US13/782,809 US9046978B2 (en) | 2012-03-23 | 2013-03-01 | Position detecting device |
| EP13157751.2A EP2642374B1 (en) | 2012-03-23 | 2013-03-05 | Position detecting device |
| TW102107651A TWI596530B (zh) | 2012-03-23 | 2013-03-05 | 位置檢測裝置 |
| CN201310095107.4A CN103324368B (zh) | 2012-03-23 | 2013-03-22 | 位置检测装置 |
| KR1020130030771A KR102044495B1 (ko) | 2012-03-23 | 2013-03-22 | 위치 검출 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012066748A JP5912727B2 (ja) | 2012-03-23 | 2012-03-23 | 位置検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013196675A true JP2013196675A (ja) | 2013-09-30 |
| JP2013196675A5 JP2013196675A5 (ja) | 2015-04-09 |
| JP5912727B2 JP5912727B2 (ja) | 2016-04-27 |
Family
ID=47845744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012066748A Expired - Fee Related JP5912727B2 (ja) | 2012-03-23 | 2012-03-23 | 位置検出装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9046978B2 (ja) |
| EP (1) | EP2642374B1 (ja) |
| JP (1) | JP5912727B2 (ja) |
| KR (1) | KR102044495B1 (ja) |
| CN (1) | CN103324368B (ja) |
| TW (1) | TWI596530B (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015118654A (ja) * | 2013-12-20 | 2015-06-25 | エルジー ディスプレイ カンパニー リミテッド | タッチセンサ内蔵型表示装置およびその駆動方法 |
| JP2016091467A (ja) * | 2014-11-10 | 2016-05-23 | キヤノン株式会社 | 電子機器、その制御方法、プログラムおよび記録媒体 |
| JP2016099897A (ja) * | 2014-11-25 | 2016-05-30 | 株式会社ジャパンディスプレイ | 表示装置およびタッチ検出方法 |
| JP2019091442A (ja) * | 2017-11-14 | 2019-06-13 | 株式会社ワコム | センサコントローラ |
| JPWO2020230223A1 (ja) * | 2019-05-10 | 2020-11-19 | ||
| US10942595B2 (en) | 2018-03-30 | 2021-03-09 | Renesas Electronics Corporation | Semiconductor device, control method thereof, and coupling relation setting process program |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5697227B1 (ja) * | 2013-09-27 | 2015-04-08 | 株式会社ワコム | 位置検出装置 |
| JP6214065B2 (ja) * | 2013-11-27 | 2017-10-18 | 株式会社ワコム | 電子機器 |
| JP6218590B2 (ja) * | 2013-12-18 | 2017-10-25 | キヤノン株式会社 | 座標入力装置及びその制御方法 |
| TWI522876B (zh) | 2014-01-22 | 2016-02-21 | Sitronix Technology Corp | Drive circuit and its touch device and touch module and manufacturing method |
| JP6406697B2 (ja) * | 2014-09-17 | 2018-10-17 | 株式会社ワコム | 位置検出装置及び位置検出方法 |
| EP3244289B1 (en) * | 2015-01-06 | 2019-02-06 | Wacom Co., Ltd. | Position detection device |
| US9870089B2 (en) * | 2015-06-01 | 2018-01-16 | Himax Technologies Limited | In-cell touch screen having a driver for concurrently scanning a plurality of electrode lines and a method of driving the same |
| CN107783700B (zh) | 2016-08-26 | 2022-04-19 | 株式会社日本显示器 | 显示装置、输入检测装置以及电子装置 |
| US10579193B2 (en) * | 2017-12-14 | 2020-03-03 | Cypress Semiconductor Corporation | Spatial-frequency-based capacitive motion sensor and method of using the same |
| CN108920026B (zh) * | 2018-05-03 | 2021-06-22 | 业成科技(成都)有限公司 | 触摸屏扫描方法、计算机设备和存储介质 |
| KR102553409B1 (ko) | 2018-06-14 | 2023-07-10 | 엘지디스플레이 주식회사 | 터치표시장치, 터치센싱회로 및 구동방법 |
| KR102600924B1 (ko) * | 2018-12-27 | 2023-11-10 | 엘지디스플레이 주식회사 | 터치표시장치 및 터치구동회로 |
| US11016617B2 (en) * | 2019-04-12 | 2021-05-25 | Egalax_Empia Technology Inc. | Touch sensitive processing method and apparatus and touch sensitive system |
| US11003288B2 (en) * | 2019-06-21 | 2021-05-11 | Synaptics Incorporated | Active input sensing using regional scanning |
| KR102883036B1 (ko) * | 2019-12-04 | 2025-11-10 | 삼성디스플레이 주식회사 | 표시장치 및 이를 포함하는 휴대용 단말기 |
| CN113760113B (zh) * | 2020-06-03 | 2024-01-23 | 京东方科技集团股份有限公司 | 一种触控面板的驱动方法及装置、触控显示装置 |
| KR102923073B1 (ko) * | 2020-12-18 | 2026-02-06 | 주식회사 엘엑스세미콘 | 터치센싱회로 및 터치센싱방법 |
| JP7651803B2 (ja) * | 2021-08-26 | 2025-03-27 | アルプスアルパイン株式会社 | 非接触入力装置 |
| CN116431024B (zh) * | 2023-06-12 | 2023-09-26 | 深圳贝特莱电子科技股份有限公司 | 一种触摸屏的抗干扰方法、装置及智能穿戴设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11505641A (ja) * | 1994-12-07 | 1999-05-21 | サーク コーポレイション | 干渉阻止装置および方法付き容量ベース近接センサ |
| JP2011003035A (ja) * | 2009-06-18 | 2011-01-06 | Wacom Co Ltd | 指示体検出装置及び指示体検出方法 |
| JP2011242908A (ja) * | 2010-05-17 | 2011-12-01 | Panasonic Corp | タッチパネル装置及びこれを備えたタッチパネルシステム |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6420992A (en) | 1987-07-13 | 1989-01-24 | Fuji Transport Conveying | Vacuum utilizing article treater |
| US4859814A (en) * | 1988-08-29 | 1989-08-22 | Kurta Corporation | Noise cancellation in digitizing system and method |
| JPH056153A (ja) | 1991-06-27 | 1993-01-14 | Alps Electric Co Ltd | タツチパネル付き液晶表示装置 |
| JPH08179871A (ja) | 1994-12-20 | 1996-07-12 | Pentel Kk | タッチパネル兼用透明デジタイザ |
| JP3434415B2 (ja) | 1996-07-05 | 2003-08-11 | アルプス電気株式会社 | 座標入力装置 |
| GB0226404D0 (en) * | 2002-11-12 | 2002-12-18 | Koninkl Philips Electronics Nv | Object sensing |
| DE602004027705D1 (de) * | 2003-02-10 | 2010-07-29 | N trig ltd | Berührungsdetektion für einen digitalisierer |
| JP4633536B2 (ja) * | 2005-05-19 | 2011-02-16 | 三菱電機株式会社 | 表示装置 |
| US8144125B2 (en) * | 2006-03-30 | 2012-03-27 | Cypress Semiconductor Corporation | Apparatus and method for reducing average scan rate to detect a conductive object on a sensing device |
| WO2007135663A1 (en) * | 2006-05-19 | 2007-11-29 | N-Trig Ltd. | Variable capacitor array |
| JP5324440B2 (ja) * | 2006-07-12 | 2013-10-23 | エヌ−トリグ リミテッド | デジタイザのためのホバリングおよびタッチ検出 |
| US8049732B2 (en) * | 2007-01-03 | 2011-11-01 | Apple Inc. | Front-end signal compensation |
| JP5280375B2 (ja) * | 2007-01-16 | 2013-09-04 | エヌ−トリグ リミテッド | 容量性タッチデジタイザシステムの較正のためのシステムおよび方法 |
| JP4932526B2 (ja) * | 2007-02-20 | 2012-05-16 | 株式会社 日立ディスプレイズ | 画面入力機能付き画像表示装置 |
| US8325147B2 (en) * | 2008-12-19 | 2012-12-04 | Motorola Mobility Llc | Touch screen device and methods thereof configured for a plurality of resolutions |
| US8481872B2 (en) * | 2008-12-22 | 2013-07-09 | N-Trig Ltd. | Digitizer, stylus and method of synchronization therewith |
| JP5396167B2 (ja) * | 2009-06-18 | 2014-01-22 | 株式会社ワコム | 指示体検出装置及び指示体検出方法 |
| JP5345007B2 (ja) * | 2009-06-29 | 2013-11-20 | 株式会社ワコム | 位置検出装置、位置検出回路及び位置検出方法 |
| TWI443554B (zh) * | 2009-08-05 | 2014-07-01 | Silicon Integrated Sys Corp | 觸碰感測裝置及其方法 |
| TWI438413B (zh) * | 2009-10-09 | 2014-05-21 | Egalax Empia Technology Inc | 訊號量測的方法與裝置 |
| TWI437478B (zh) * | 2010-01-22 | 2014-05-11 | Orise Technology Co Ltd | 差動偵測電容式觸控的方法及系統 |
-
2012
- 2012-03-23 JP JP2012066748A patent/JP5912727B2/ja not_active Expired - Fee Related
-
2013
- 2013-03-01 US US13/782,809 patent/US9046978B2/en active Active
- 2013-03-05 TW TW102107651A patent/TWI596530B/zh not_active IP Right Cessation
- 2013-03-05 EP EP13157751.2A patent/EP2642374B1/en active Active
- 2013-03-22 CN CN201310095107.4A patent/CN103324368B/zh not_active Expired - Fee Related
- 2013-03-22 KR KR1020130030771A patent/KR102044495B1/ko not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11505641A (ja) * | 1994-12-07 | 1999-05-21 | サーク コーポレイション | 干渉阻止装置および方法付き容量ベース近接センサ |
| JP2011003035A (ja) * | 2009-06-18 | 2011-01-06 | Wacom Co Ltd | 指示体検出装置及び指示体検出方法 |
| JP2011242908A (ja) * | 2010-05-17 | 2011-12-01 | Panasonic Corp | タッチパネル装置及びこれを備えたタッチパネルシステム |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015118654A (ja) * | 2013-12-20 | 2015-06-25 | エルジー ディスプレイ カンパニー リミテッド | タッチセンサ内蔵型表示装置およびその駆動方法 |
| JP2016091467A (ja) * | 2014-11-10 | 2016-05-23 | キヤノン株式会社 | 電子機器、その制御方法、プログラムおよび記録媒体 |
| JP2016099897A (ja) * | 2014-11-25 | 2016-05-30 | 株式会社ジャパンディスプレイ | 表示装置およびタッチ検出方法 |
| JP2019091442A (ja) * | 2017-11-14 | 2019-06-13 | 株式会社ワコム | センサコントローラ |
| CN110892368A (zh) * | 2017-11-14 | 2020-03-17 | 株式会社和冠 | 传感器控制器 |
| JP7215881B2 (ja) | 2017-11-14 | 2023-01-31 | 株式会社ワコム | センサコントローラ |
| US10942595B2 (en) | 2018-03-30 | 2021-03-09 | Renesas Electronics Corporation | Semiconductor device, control method thereof, and coupling relation setting process program |
| JPWO2020230223A1 (ja) * | 2019-05-10 | 2020-11-19 | ||
| JP7113139B2 (ja) | 2019-05-10 | 2022-08-04 | 株式会社ワコム | センサコントローラからペンに対して送信データを送信する方法、及び、ペン |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103324368A (zh) | 2013-09-25 |
| EP2642374B1 (en) | 2020-02-12 |
| US9046978B2 (en) | 2015-06-02 |
| KR102044495B1 (ko) | 2019-11-13 |
| JP5912727B2 (ja) | 2016-04-27 |
| TWI596530B (zh) | 2017-08-21 |
| CN103324368B (zh) | 2017-07-11 |
| TW201351250A (zh) | 2013-12-16 |
| EP2642374A3 (en) | 2017-08-23 |
| KR20130108177A (ko) | 2013-10-02 |
| EP2642374A2 (en) | 2013-09-25 |
| US20130249854A1 (en) | 2013-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5912727B2 (ja) | 位置検出装置 | |
| US9632641B2 (en) | Touch panel for determining real coordinates of the multiple touch points and method thereof | |
| KR101663763B1 (ko) | 터치스크린을 구비한 표시장치 | |
| WO2010079551A1 (ja) | タッチパネル装置及びその製造方法、並びに表示装置 | |
| TWI417778B (zh) | 補償電容偏差之電子裝置 | |
| US10180761B2 (en) | Touch-panel-equipped display device including side surface electrodes | |
| KR20130099420A (ko) | 정전용량 방식의 터치 스크린을 구비하는 단말기와 그의 터치 위치 검출 방법 | |
| US10061445B2 (en) | Touch input device | |
| US20170242523A1 (en) | Transcapacitive touch and force sensing in an input device | |
| US8698779B2 (en) | Touch panel with unbalanced conductive patterns, and touch-controlled apparatus and method for determining multi-touch thereof | |
| US20130155003A1 (en) | Touch sensing apparatus and method thereof | |
| US9552116B2 (en) | Touch apparatus | |
| US9977548B2 (en) | Touch panel and touch electrode structure thereof | |
| US20160132180A1 (en) | Capacitive Touch Circuit and Touch Sensor and Capacitive Touch System Using The Same | |
| US20100117983A1 (en) | Resistive touch panel and method for detecting touch points thereof | |
| JP2012128676A (ja) | タッチパネル | |
| US20160188104A1 (en) | Position detecting device | |
| US20100117976A1 (en) | Resistive touch panel | |
| CN102645994A (zh) | 一种触控面板及其触摸定位方法、装置 | |
| US20100117984A1 (en) | Resistive touch panel | |
| US20100116561A1 (en) | Resistive touch panel | |
| KR20150115994A (ko) | 터치 감지 장치 및 시스템 | |
| KR20150051719A (ko) | 터치패널센서 | |
| KR20140111906A (ko) | 터치 패널 | |
| KR20130118675A (ko) | 단일 계층 정전용량 터치스크린 패널을 가지는 입력장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150223 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160301 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5912727 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |