JP2013200656A - 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 - Google Patents
車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 Download PDFInfo
- Publication number
- JP2013200656A JP2013200656A JP2012067889A JP2012067889A JP2013200656A JP 2013200656 A JP2013200656 A JP 2013200656A JP 2012067889 A JP2012067889 A JP 2012067889A JP 2012067889 A JP2012067889 A JP 2012067889A JP 2013200656 A JP2013200656 A JP 2013200656A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- data
- imaging
- measurement
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012545 processing Methods 0.000 title claims abstract description 150
- 238000003672 processing method Methods 0.000 title claims description 6
- 238000005259 measurement Methods 0.000 claims abstract description 410
- 238000003384 imaging method Methods 0.000 claims abstract description 360
- 238000000034 method Methods 0.000 claims abstract description 24
- 230000008569 process Effects 0.000 claims abstract description 12
- 238000011156 evaluation Methods 0.000 claims description 60
- 230000006870 function Effects 0.000 claims description 22
- 230000008685 targeting Effects 0.000 claims description 9
- 238000013500 data storage Methods 0.000 description 36
- 230000006854 communication Effects 0.000 description 17
- 238000004891 communication Methods 0.000 description 14
- 238000012546 transfer Methods 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000010365 information processing Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000000284 extract Substances 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07B—TICKET-ISSUING APPARATUS; FARE-REGISTERING APPARATUS; FRANKING APPARATUS
- G07B15/00—Arrangements or apparatus for collecting fares, tolls or entrance fees at one or more control points
- G07B15/06—Arrangements for road pricing or congestion charging of vehicles or vehicle users, e.g. automatic toll systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/015—Detecting movement of traffic to be counted or controlled with provision for distinguishing between two or more types of vehicles, e.g. between motor-cars and cycles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
- G08G1/0175—Detecting movement of traffic to be counted or controlled identifying vehicles by photographing vehicles, e.g. when violating traffic rules
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
- G08G1/054—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed photographing overspeeding vehicles
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Finance (AREA)
- Traffic Control Systems (AREA)
- Devices For Checking Fares Or Tickets At Control Points (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
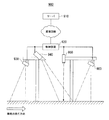
【解決手段】道路Rの上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置130と、撮像装置130の撮像範囲Aa〜cにおける道路Rの幅員方向を走査するように設けられて、走査範囲Lを通過する車両の寸法を計測する計測装置170と、道路Rを走行する車両に関するデータを処理する車両データ処理装置110とを備え、車両データ処理装置110は、計測装置170によって計測された車両の情報を含む複数の計測データのうち、撮像装置130によって撮像された車両の情報と同じ情報を含む一の計測データを、撮像装置130によって撮像された当該車両の情報を含む一の撮像データに紐付けるデータ紐付部を有する。
【選択図】図1
Description
110 車両データ処理装置
111 撮像データ受信部
112 計測データ受信部
113 計測中時刻データ受信部
114 同位置検索部
115 同時間帯検索部
116 同車種区分検索部
117 車速評価部
118 時間帯評価部
119 位置評価部
120 時刻判定部
121 データ紐付部
122 撮像データ格納部
123 計測データ格納部
130 カメラ
150 撮像データ生成装置
170 レーザスキャナ
190 計測データ生成装置
800 コンピュータ
801 ホストコントローラ
802 CPU
803 RAM
804 グラフィックコントローラ
805 ディスプレイ
806 入出力コントローラ
807 通信インターフェース
808 ハードディスクドライブ
809 CD−ROMドライブ
810 ROM
811 フレキシブルディスクドライブ
812 入出力チップ
891 ネットワーク通信装置
892 CD−ROM
893 フレキシブルディスク
Aa カメラ130aの撮像範囲
Ab カメラ130bの撮像範囲
Ac カメラ130cの撮像範囲
Ga ゲート
Gb ゲート
R 道路
Ra 車線
Rb 車線
Rc 車線
Claims (13)
- 道路を走行する車両に関するデータを処理する車両データ処理システムであって、
前記道路の上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置と、
前記撮像装置の撮像範囲における前記道路の幅員方向を走査するように設けられて、走査範囲を通過する車両の寸法を計測する計測装置と、
前記道路を走行する車両に関するデータを処理する車両データ処理装置と
を備え、
前記車両データ処理装置は、
前記計測装置によって計測された車両の情報を含む複数の計測データのうち、前記撮像装置によって撮像された車両の情報と同じ情報を含む一の計測データを、前記撮像装置によって撮像された当該車両の情報を含む一の撮像データに紐付けるデータ紐付部
を有する車両データ処理システム。 - 前記車両データ処理装置は、
前記計測装置によって計測された車両の情報を含む計測データの中から、前記撮像装置によって撮像された車両の情報を含む一の撮像データの対象の車両の車種区分と同じ車種区分の車両の情報を含む計測データを検索する同車種区分検索部
を更に有し、
前記データ紐付部は、一の計測データを前記同車種区分検索部が検索した場合に、当該一の計測データを、前記一の撮像データに紐付ける
請求項1に記載の車両データ処理システム。 - 前記車両データ処理装置は、
前記計測装置によって計測された車両の情報を含む計測データの中から、前記撮像装置によって撮像された車両の情報を含む一の撮像データの対象の車両が撮像された時間帯と同じ時間帯に測定された車両の情報を含む計測データを検索する同時間帯検索部
を更に有し、
前記同車種区分検索部は、前記同時間帯検索部が検索した計測データの中から、前記一の撮像データの対象の車両の車種区分と同じ車種区分の車両の情報を含む計測データを検索する
請求項2に記載の車両データ処理システム。 - 前記車両データ処理装置は、
前記計測装置によって計測された車両の情報を含む計測データの中から、前記撮像装置によって撮像された車両の情報を含む一の撮像データの対象の車両の撮像位置と同じ位置において計測された車両の情報を含む計測データを検索する同位置検索部
を更に有し、
前記同時間帯検索部は、前記同位置検索部が検索した計測データの中から、前記一の撮像データの対象の車両が撮像された時間帯と同じ時間帯に計測された車両の情報を含む計測データを検索する
請求項3に記載の車両データ処理システム。 - 前記車両データ処理装置は、
複数の計測データを前記同車種区分検索部が検索した場合に、当該複数の計測データがそれぞれ対象にしている車両の車速と、前記一の撮像データの対象の車両の車速とが一致する度合いを評価する車速評価部
を更に有し、
前記データ紐付部は、前記同車種区分検索部が検索した複数の計測データのうち、前記車速評価部が評価した一致する度合いの高い車速の車両を対象にしている一の計測データを、前記一の撮像データに紐付ける
請求項2から4のいずれか一項に記載の車両データ処理システム。 - 前記車両データ処理装置は、
複数の計測データを前記同車種区分検索部が検索した場合に、当該複数の計測データがそれぞれ対象にしている車両が計測された時間帯と、前記一の撮像データの対象の車両が撮像された時間帯とが一致する度合いを評価する時間帯評価部
を更に有し、
前記データ紐付部は、前記同車種区分検索部が検索した複数の計測データのうち、前記時間帯評価部が評価した一致する度合いの高い時間帯に計測された車両を対象にしている一の計測データを、前記一の撮像データに紐付ける
請求項2から5のいずれか一項に記載の車両データ処理システム。 - 前記車両データ処理装置は、
複数の計測データを前記同車種区分検索部が検索した場合に、当該複数の計測データがそれぞれ対象にしている車両が計測された位置と、前記一の撮像データの対象の車両が撮像された位置とが一致する度合いを評価する位置評価部
を更に有し、
前記データ紐付部は、前記同車種区分検索部が検索した複数の計測データのうち、前記位置評価部が評価した一致する度合いの高い位置において計測された車両を対象にしている一の計測データを、前記一の撮像データに紐付ける
請求項2から6のいずれか一項に記載の車両データ処理システム。 - 前記車両データ処理装置は、
前記同車種区分検索部、又は前記同時間帯検索部が計測データを検索した結果、前記一の撮像データの対象の車両の情報と同じ情報を含む計測データが検索されなかった場合に、前記計測装置が計測中の車両の計測開始時刻が、前記一の撮像データの対象の車両が最後に撮像された時刻よりも前の時刻であるか否かを判定する時刻判定部
を更に有し、
前記データ紐付部は、前記計測開始時刻が、前記一の撮像データの対象の車両が最後に撮像された時刻よりも前の時刻であると前記時刻判定部が判定した場合、当該一の撮像データに対する前記計測データの紐付けを保留する
請求項3又は4に記載の車両データ処理システム。 - 前記データ紐付部は、前記計測開始時刻が、前記一の撮像データの対象の車両が最後に撮像された時刻よりも前の時刻ではないと前記時刻判定部が判定した場合、当該一の撮像データに対して前記計測データを紐付けることなく、当該一の撮像データについて、前記計測データを紐付けたものとする
請求項8に記載の車両データ処理システム。 - 道路を走行する車両に関するデータを処理する車両データ処理方法であって、
前記道路の上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置の撮像範囲における前記道路の幅員方向を走査するように設けられて、走査範囲を通過する車両の寸法を計測する計測装置によって計測された車両の情報を含む複数の計測データのうち、前記撮像装置によって撮像された車両と同じ情報を含む一の計測データを、前記撮像装置によって撮像された車両の情報を含む一の撮像データに紐付けるデータ紐付段階
を備える車両データ処理方法。 - 道路を走行する車両に関するデータを処理する車両データ処理装置であって、
前記道路の上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置の撮像範囲における前記道路の幅員方向を走査するように設けられて、走査範囲を通過する車両の寸法を計測する計測装置によって計測された車両の情報を含む複数の計測データのうち、前記撮像装置によって撮像された車両と同じ情報を含む一の計測データを、前記撮像装置によって撮像された車両の情報を含む一の撮像データに紐付けるデータ紐付部
を備える車両データ処理装置。 - 道路を走行する車両に関するデータを処理する車両データ処理装置として、コンピュータを機能させるプログラムであって、
前記コンピュータを、
前記道路の上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置の撮像範囲における前記道路の幅員方向を走査するように設けられて、走査範囲を通過する車両の寸法を計測する計測装置によって計測された車両の情報を含む複数の計測データのうち、前記撮像装置によって撮像された車両と同じ情報を含む一の計測データを、前記撮像装置によって撮像された車両の情報を含む一の撮像データに紐付けるデータ紐付部
として機能させるプログラム。 - 道路を走行する車両に関するデータを処理する車両データ処理装置として、コンピュータを機能させるプログラムを記録した記録媒体であって、
前記コンピュータを、
前記道路の上方の幅員方向に並べて設けられて、斜め下方を経時的に撮像する複数の撮像装置の撮像範囲における前記道路の幅員方向を走査するように設けられて、走査範囲を通過する車両の寸法を計測する計測装置によって計測された車両の情報を含む複数の計測データのうち、前記撮像装置によって撮像された車両と同じ情報を含む一の計測データを、前記撮像装置によって撮像された車両の情報を含む一の撮像データに紐付けるデータ紐付部
として機能させるプログラムを記録した記録媒体。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012067889A JP5931530B2 (ja) | 2012-03-23 | 2012-03-23 | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 |
| IN1834MUN2014 IN2014MN01834A (ja) | 2012-03-23 | 2013-03-07 | |
| PCT/JP2013/056299 WO2013141034A1 (ja) | 2012-03-23 | 2013-03-07 | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 |
| MYPI2014702663A MY167972A (en) | 2012-03-23 | 2013-03-07 | Vehicle data processing system, vehicle data processing method, vehicle data processing device, program, and recording medium |
| SG11201405858TA SG11201405858TA (en) | 2012-03-23 | 2013-03-07 | Vehicle data processing system, vehicle data processing method, vehicle data processing device, program and recording medium |
| TW102108950A TWI488148B (zh) | 2012-03-23 | 2013-03-13 | 車輛資料處理系統、車輛資料處理方法、車輛資料處理裝置、程式、及記錄媒體 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012067889A JP5931530B2 (ja) | 2012-03-23 | 2012-03-23 | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013200656A true JP2013200656A (ja) | 2013-10-03 |
| JP5931530B2 JP5931530B2 (ja) | 2016-06-08 |
Family
ID=49222494
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012067889A Active JP5931530B2 (ja) | 2012-03-23 | 2012-03-23 | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 |
Country Status (6)
| Country | Link |
|---|---|
| JP (1) | JP5931530B2 (ja) |
| IN (1) | IN2014MN01834A (ja) |
| MY (1) | MY167972A (ja) |
| SG (1) | SG11201405858TA (ja) |
| TW (1) | TWI488148B (ja) |
| WO (1) | WO2013141034A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104794901A (zh) * | 2015-04-30 | 2015-07-22 | 深圳市车易泊技术股份有限公司 | 停车场车辆防盗系统及停车场车辆管理方法、控制方法 |
| WO2016136660A1 (ja) * | 2015-02-27 | 2016-09-01 | 三菱重工メカトロシステムズ株式会社 | 車種判別装置、料金収受設備、車種判別方法及びプログラム |
| JP2018146286A (ja) * | 2017-03-02 | 2018-09-20 | 株式会社レッツ・コーポレーション | ナンバープレート情報関連付けシステムおよび重量計測システム |
| US10157541B2 (en) | 2014-09-19 | 2018-12-18 | Mitsubishi Heavy Industries Machinery Systems, Ltd. | Vehicle surveillance system, vehicle surveillance method, and program |
| JP2020144722A (ja) * | 2019-03-08 | 2020-09-10 | オムロン株式会社 | 車種判定装置、車種判定方法、および車種判定プログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110012448B (zh) * | 2018-12-18 | 2021-10-26 | 中国银联股份有限公司 | 基于灯光的车辆端通信方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007207220A (ja) * | 2006-01-05 | 2007-08-16 | Mitsubishi Heavy Ind Ltd | 移動体課金システム、移動体課金システムによる移動体課金方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0616302B1 (en) * | 1993-02-19 | 1999-06-23 | Mitsubishi Jukogyo Kabushiki Kaisha | Electronic traffic tariff reception system |
| SE511067C2 (sv) * | 1996-10-03 | 1999-07-26 | Combitech Traffic Syst Ab | Förfarande och anordning för registrering i en vägtull av ett fordons yttre kännetecken |
| US7983835B2 (en) * | 2004-11-03 | 2011-07-19 | Lagassey Paul J | Modular intelligent transportation system |
-
2012
- 2012-03-23 JP JP2012067889A patent/JP5931530B2/ja active Active
-
2013
- 2013-03-07 SG SG11201405858TA patent/SG11201405858TA/en unknown
- 2013-03-07 MY MYPI2014702663A patent/MY167972A/en unknown
- 2013-03-07 IN IN1834MUN2014 patent/IN2014MN01834A/en unknown
- 2013-03-07 WO PCT/JP2013/056299 patent/WO2013141034A1/ja not_active Ceased
- 2013-03-13 TW TW102108950A patent/TWI488148B/zh not_active IP Right Cessation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007207220A (ja) * | 2006-01-05 | 2007-08-16 | Mitsubishi Heavy Ind Ltd | 移動体課金システム、移動体課金システムによる移動体課金方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10157541B2 (en) | 2014-09-19 | 2018-12-18 | Mitsubishi Heavy Industries Machinery Systems, Ltd. | Vehicle surveillance system, vehicle surveillance method, and program |
| WO2016136660A1 (ja) * | 2015-02-27 | 2016-09-01 | 三菱重工メカトロシステムズ株式会社 | 車種判別装置、料金収受設備、車種判別方法及びプログラム |
| CN104794901A (zh) * | 2015-04-30 | 2015-07-22 | 深圳市车易泊技术股份有限公司 | 停车场车辆防盗系统及停车场车辆管理方法、控制方法 |
| JP2018146286A (ja) * | 2017-03-02 | 2018-09-20 | 株式会社レッツ・コーポレーション | ナンバープレート情報関連付けシステムおよび重量計測システム |
| JP2020144722A (ja) * | 2019-03-08 | 2020-09-10 | オムロン株式会社 | 車種判定装置、車種判定方法、および車種判定プログラム |
| JP2024009088A (ja) * | 2019-03-08 | 2024-01-19 | オムロン株式会社 | 車種判定装置、車種判定方法、および車種判定プログラム |
| JP7525247B2 (ja) | 2019-03-08 | 2024-07-30 | オムロン株式会社 | 車種判定装置、車種判定方法、および車種判定プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| IN2014MN01834A (ja) | 2015-07-03 |
| WO2013141034A1 (ja) | 2013-09-26 |
| JP5931530B2 (ja) | 2016-06-08 |
| TWI488148B (zh) | 2015-06-11 |
| MY167972A (en) | 2018-10-09 |
| SG11201405858TA (en) | 2014-11-27 |
| TW201346845A (zh) | 2013-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5931530B2 (ja) | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 | |
| JP6791200B2 (ja) | 捜索支援システム、捜索支援装置、及び、捜索支援方法 | |
| KR101757085B1 (ko) | 차량 데이터 수집 시스템, 차량 데이터 수집 방법, 차량 탑재 장치 및 기록 매체 | |
| CN106062844A (zh) | 路面状态的测定方法、路面的恶化位置确定方法、信息处理装置以及程序 | |
| US10157541B2 (en) | Vehicle surveillance system, vehicle surveillance method, and program | |
| JP5979940B2 (ja) | 車両データ処理システム、車両データ処理方法、車両データ処理装置、プログラム、及び記録媒体 | |
| CN105160716A (zh) | 一种防止车辆偷逃费的系统及方法 | |
| JP2010230813A (ja) | 情報提供装置、情報提供方法およびプログラム | |
| KR102205057B1 (ko) | 동일 차량 검출 장치, 요금 수수 설비, 동일 차량 검출 방법 및 프로그램 | |
| JP6086651B2 (ja) | 車両番号データ処理システム、車両番号データ処理方法、車両番号データ処理装置、プログラム、及び記録媒体 | |
| WO2014076979A1 (ja) | 画像認識装置、画像認識方法、プログラム、及び記録媒体 | |
| JP5667907B2 (ja) | 情報提供システム | |
| CN204833376U (zh) | 一种防止车辆偷逃费的系统 | |
| CN103093615A (zh) | 路况信息的采集与分析系统 | |
| JP7119863B2 (ja) | 路側装置、センタサーバ、及び情報処理方法 | |
| JP6110632B2 (ja) | 課金処理システム、課金処理方法、課金処理装置、プログラム、及び記録媒体 | |
| CN105205814A (zh) | 一种违规加长车辆实时检测方法 | |
| WO2022249516A1 (ja) | 路面状態判定装置、路面状態判定システム、車両、路面状態判定方法、及びプログラム | |
| CN112650876B (zh) | 图像处理方法、装置、电子设备、存储介质和程序产品 | |
| JP2009157818A (ja) | ポイント付きプリペイド媒体へのポイント還元方法およびシステム | |
| JP2013190836A (ja) | 車両検知システム、車両検知方法、車両検知装置、プログラム、及び記録媒体 | |
| JP2018173709A (ja) | 通行情報処理装置及び通行情報処理プログラム | |
| JP2025138127A (ja) | 料金判別装置、料金判別システム、料金判別方法、および料金判別プログラム | |
| CN116935501A (zh) | 高速公路收费系统 | |
| JP5703179B2 (ja) | 中央処理装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151208 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160204 |
|
| TRDD | Decision of grant or rejection written | ||
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20160323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160324 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5931530 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |