JP2013205355A - ターゲットサイズ測定装置 - Google Patents
ターゲットサイズ測定装置 Download PDFInfo
- Publication number
- JP2013205355A JP2013205355A JP2012077302A JP2012077302A JP2013205355A JP 2013205355 A JP2013205355 A JP 2013205355A JP 2012077302 A JP2012077302 A JP 2012077302A JP 2012077302 A JP2012077302 A JP 2012077302A JP 2013205355 A JP2013205355 A JP 2013205355A
- Authority
- JP
- Japan
- Prior art keywords
- target
- received light
- light amount
- size
- laser beam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
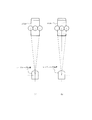
【解決手段】ターゲットサイズ測定装置は、背面物4からの反射光を利用する背面反射利用測定を実行する。背面反射利用サイズ測定では、受光量データを用いてターゲット2が存在しないときの背面物4からの反射光の受光量を基準受光量として取得する。与えられた距離データが示す距離に位置するターゲットに照射されたときのレーザビームの直径をビームサイズとして取得する。距離データが与えられた時点の前後において連続して与えられた受光量データのそれぞれが表す受光量のうち背面物4からの反射光に対応する受光量を比較受光量として取得する。基準受光量に対する比較受光量の変化割合に基づいて、その比較受光量に対応する反射光の元になったレーザビームがターゲット2に照射された照射割合を求める。ビームサイズおよび照射割合に基づいて、ターゲット2の検出方向についての長さを求める。
【選択図】図2
Description
(第1の実施形態)
以下、本発明の第1の実施形態について図1〜図12を参照しながら説明する。
図1に示すレーザレーダ装置1は、レーザビームを放射するレーザダイオードを含む発光部、対象物からの反射光を受光するフォトダイオードを含む受光部、それらを制御する制御部(いずれも図示せず)などを備えている。レーザレーダ装置1は、例えば180度の範囲で水平方向(検出方向)に高速回転しながらレーザビームLを断続的に放射し、その反射波を受光する。レーザレーダ装置1は、レーザビームLを放射した時点から反射光を受光した時点までの時間に基づいてターゲット2(対象物に相当)までの距離を測定する。
(1)レーザビームの形状は真円である。
(2)回転角度分解能(レーザビームが放射される間隔)は0.25°である。
(3)ターゲットに到達した際(照射された際)におけるレーザビームのサイズ(直径)と、レーザビームの中心同士の間隔(走査分解能)とは一致している。
なお、走査分解能は、下記(1)式により表される。
走査分解能=ターゲットまでの距離×tan(回転角度分解能) …(1)
なお、この場合、図2に示すように、ターゲット2の背面側(レーザビームが照射される側とは反対側)に背面物4が存在するものとする。背面物4は、例えば壁面などであり、その位置は固定されている。測距データDaは、受光量データおよび距離データを含んでいる。受光量データは、レーザビームの放射時点を基準とした経過時間および受光した反射光の受光量(受光信号の積分値=面積)を対応付けたものである(図3参照)。距離データは、測定されたターゲットまでの距離の値を示すものである。
E=Emin+((Emax−Emin)/Amax)×A …(2)
なお、上記(2)式に基づく演算により算出する方法に代えて、上記直径および距離を関係付けたマップなどを予め準備しておき、そのマップを参照することにより、ターゲットに照射されたときのレーザビームの直径Eを求めるようにしてもよい。
X=(Xr−Xc)/Xr
=1−(Xc/Xr) …(3)
従来の連続測距点数を用いる測定方法によれば、ターゲットサイズFは、距離値A、回転角度分解能B、連続測距点数C、走査分解能DおよびビームサイズE(図4参照)を用いて、次のようにして求められる。まず、レーザレーダ装置1により測定されたターゲット2までの距離の値である距離値A、回転角度分解能Bおよび連続測距点数Cが取得される。回転角度分解能Bは、レーザレーダ装置1の仕様に応じて定まる固定の値(例えば、0.25°)である。そして、下記(4)式に基づいて、ターゲット2に到達した際におけるレーザビームの中心同士の間隔である走査分解能Dが算出される。
D=A×sin(B) …(4)
(C−1)×D−E < F < (C+1)×D+E (5)
図5の(a)に示すターゲット21は、ターゲットサイズFがビームサイズEの5倍よりも若干短い。そのため、ターゲット21の位置によっては、ターゲット21には5つの連続するレーザビームが照射されるものの、そのうちの両端のレーザビームの一部分がターゲット21に照射されない(僅かに欠ける)場合がある(図5の(a)参照)。このようなケースにおいて、ターゲット21の表面の反射率が低い場合には、ターゲット21に照射された5つのレーザビームうち、中間に位置する3つによる反射光だけが良好に得られるため、連続測距点数Cが3点となる。
図6の(a)に示すターゲット23は、ターゲットサイズがビームサイズEの4倍よりも若干短い。そのため、ターゲット23の位置によっては、ターゲット23には4つの連続するレーザビームが照射されるものの、そのうちの両端のレーザビームの一部分がターゲット23に照射されない場合がある(図6の(a)参照)。このようなケースにおいて、ターゲット23の表面の反射率が低い場合には、ターゲット23に照射された4つのレーザビームうち、中間に位置する2つによる反射光だけが良好に得られるため、連続測距点数Cが2点となる。
図7の(a)に示すターゲット25は、ターゲットサイズがビームサイズEの3倍よりも若干短い。そのため、ターゲット25の位置によっては、ターゲット25には3つの連続するレーザビームが照射されるものの、そのうちの両端のレーザビームの一部分がターゲット25に照射されない場合がある(図7の(a)参照)。このようなケースにおいて、ターゲット25の表面の反射率が低い場合には、ターゲット25に照射された3つのレーザビームうち、中間に位置する1つによる反射光だけが良好に得られるため、連続測距点数Cが1点となる。
以下、本発明の第2の実施形態について図13および図14を参照しながら説明する。
本実施形態のターゲットサイズ測定装置3は、背面物からの反射光が得られるか否か(背面物が存在するか否か)に関わらず、ターゲット2からの反射光の受光量を利用してターゲットサイズを測定するターゲット反射利用サイズ測定を実行する。
Y=Yc/Yr …(6)
なお、本発明は上記し且つ図面に記載した各実施形態に限定されるものではなく、次のような変形または拡張が可能である。
レーザレーダ装置1の検出方向(回転方向)は水平方向に限らずともよい。
レーザビームの形状が真円ではなく楕円である場合、ビームサイズEは、レーザビームの検出方向についての長さとすればよい。
F=F’+(C’−1)×(D−E) …(7)
Claims (2)
- 検出方向に回転しながらレーザビームを断続的に放射するとともに、その放射されたレーザビームの反射光を受光し、前記レーザビームの放射時点から前記反射光の受光時点までの時間に基づいて、そのレーザビームを反射した対象物までの距離を測定するレーザレーダ装置から与えられる測距データを用いて前記対象物の前記検出方向についての長さを測定するターゲットサイズ測定装置であって、
前記測距データは、前記レーザビームの放射時点を基準とした経過時間および受光した前記反射光の受光量を対応付けた受光量データと、測定された前記対象物までの距離の値を示す距離データとを含み、
前記対象物の前記レーザビームが照射される側とは反対側に位置する固定された物体である背面物からの反射光の受光量を利用して前記対象物の前記検出方向についての長さを測定する背面反射利用測定を実行し、
前記背面反射利用サイズ測定では、
前記受光量データを用いて、前記対象物からの反射光が存在しないときにおける前記背面物からの反射光の受光量を基準受光量として取得し、
前記距離データが与えられると、
前記距離データが示す距離に位置する前記対象物に照射されたときの前記レーザビームの直径をビームサイズとして取得し、
前記距離データが与えられた時点の前後において連続して与えられた前記受光量データのそれぞれが表す受光量のうち、前記背面物からの反射光に対応する受光量を比較受光量として取得し、
前記基準受光量に対する前記比較受光量の変化割合に基づいて、その比較受光量に対応する反射光の元になった前記レーザビームが前記対象物に照射された割合である照射割合を求め、
前記ビームサイズおよび前記照射割合に基づいて、前記対象物の前記検出方向についての長さを求めることを特徴とするターゲットサイズ測定装置。 - 前記背面物からの反射光が得られない場合、前記対象物からの反射光の受光量を利用して前記対象物の前記検出方向についての長さを測定するターゲット反射利用サイズ測定を実行し、
前記ターゲット反射利用測定では、
前記距離データが与えられた時点の前後において3回以上連続して前記受光量データが与えられている場合、
前記距離データが示す距離に位置する前記対象物に照射されたときの前記レーザビームの直径をビームサイズとして取得し、
連続する前記受光量データのうち、最初および最後に与えられたものを除いた前記受光量データのうち、いずれかが表す受光量を基準受光量として取得し、
連続する前記受光量データのそれぞれが表す受光量を比較受光量として取得し、
前記基準受光量に対する前記比較受光量の変化割合に基づいて、その比較受光量に対応する反射光の元になった前記レーザビームが前記対象物に照射された割合である照射割合を求め、
前記ビームサイズおよび前記照射割合に基づいて、前記対象物の前記検出方向についての長さを求めることを特徴とする請求項1に記載のターゲットサイズ測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012077302A JP5767149B2 (ja) | 2012-03-29 | 2012-03-29 | ターゲットサイズ測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012077302A JP5767149B2 (ja) | 2012-03-29 | 2012-03-29 | ターゲットサイズ測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013205355A true JP2013205355A (ja) | 2013-10-07 |
| JP5767149B2 JP5767149B2 (ja) | 2015-08-19 |
Family
ID=49524560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012077302A Active JP5767149B2 (ja) | 2012-03-29 | 2012-03-29 | ターゲットサイズ測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5767149B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016009945A1 (ja) * | 2014-07-16 | 2016-01-21 | 株式会社デンソー | 車載レーダ装置、報知システムおよび車載レーダ装置の走行車両検出方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62194402A (ja) * | 1986-02-21 | 1987-08-26 | Citizen Watch Co Ltd | 微小寸法測定方法 |
| JPH0455705A (ja) * | 1990-06-26 | 1992-02-24 | Nireco Corp | 端部検出装置 |
| JP2000039475A (ja) * | 1998-07-23 | 2000-02-08 | Omron Corp | 物体識別装置 |
| JP2007121158A (ja) * | 2005-10-28 | 2007-05-17 | Secom Co Ltd | 侵入検知装置 |
| US8213022B1 (en) * | 2009-03-04 | 2012-07-03 | University Of Central Florida Research Foundation, Inc. | Spatially smart optical sensing and scanning |
-
2012
- 2012-03-29 JP JP2012077302A patent/JP5767149B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62194402A (ja) * | 1986-02-21 | 1987-08-26 | Citizen Watch Co Ltd | 微小寸法測定方法 |
| JPH0455705A (ja) * | 1990-06-26 | 1992-02-24 | Nireco Corp | 端部検出装置 |
| JP2000039475A (ja) * | 1998-07-23 | 2000-02-08 | Omron Corp | 物体識別装置 |
| JP2007121158A (ja) * | 2005-10-28 | 2007-05-17 | Secom Co Ltd | 侵入検知装置 |
| US8213022B1 (en) * | 2009-03-04 | 2012-07-03 | University Of Central Florida Research Foundation, Inc. | Spatially smart optical sensing and scanning |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016009945A1 (ja) * | 2014-07-16 | 2016-01-21 | 株式会社デンソー | 車載レーダ装置、報知システムおよび車載レーダ装置の走行車両検出方法 |
| JP2016023949A (ja) * | 2014-07-16 | 2016-02-08 | 株式会社デンソー | 車載レーダ装置および報知システム |
| CN106574969A (zh) * | 2014-07-16 | 2017-04-19 | 株式会社电装 | 车载雷达装置、报告系统以及车载雷达装置的行驶车辆检测方法 |
| CN106574969B (zh) * | 2014-07-16 | 2020-06-05 | 株式会社电装 | 车载雷达装置、报告系统以及车载雷达装置的行驶车辆检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5767149B2 (ja) | 2015-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3563179B1 (en) | Lidar sensor assembly calibration based on reference surface | |
| US20210003681A1 (en) | Interference mitigation for light detection and ranging | |
| US10509111B2 (en) | LIDAR sensor device | |
| JP4984713B2 (ja) | レーダ装置 | |
| WO2017184336A3 (en) | Multi-wavelength lidar system | |
| CN109631782A (zh) | 用于测量桥梁间隙的系统和方法 | |
| WO2017092405A1 (zh) | 移动目标状态监测方法、装置及其车辆快速检查系统 | |
| US11163044B2 (en) | Lidar system | |
| US20200150248A1 (en) | Lidar signal processing apparatus and lidar apparatus | |
| JP5767150B2 (ja) | ターゲットサイズ測定装置 | |
| JP6186863B2 (ja) | 測距装置及びプログラム | |
| US11513192B2 (en) | Lidar signal processing apparatus and method | |
| JP6260418B2 (ja) | 距離測定装置、距離測定方法および距離測定プログラム | |
| JP5767149B2 (ja) | ターゲットサイズ測定装置 | |
| CN111712734A (zh) | 一种激光测距装置及移动平台 | |
| JP6676974B2 (ja) | 対象物検出装置 | |
| JP7804190B2 (ja) | 距離計測装置 | |
| KR101604867B1 (ko) | 분광기술을 적용한 검지장치 | |
| JP7221029B2 (ja) | 誤差補正装置、距離測定装置 | |
| JP6736682B2 (ja) | センサ装置、センシング方法、プログラム及び記憶媒体 | |
| US11536838B2 (en) | Detection device for a motor vehicle, driver assistance system, motor vehicle, and method | |
| US20090091737A1 (en) | Laser measuring device | |
| CN112596066B (zh) | 激光雷达的测距方法、测距装置及存储介质 | |
| JP2014191595A (ja) | 物標検出装置 | |
| WO2017122637A1 (ja) | 測距装置および測距方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140806 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5767149 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |