JP2013234890A - エンコーダ、及び駆動装置 - Google Patents
エンコーダ、及び駆動装置 Download PDFInfo
- Publication number
- JP2013234890A JP2013234890A JP2012106720A JP2012106720A JP2013234890A JP 2013234890 A JP2013234890 A JP 2013234890A JP 2012106720 A JP2012106720 A JP 2012106720A JP 2012106720 A JP2012106720 A JP 2012106720A JP 2013234890 A JP2013234890 A JP 2013234890A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- period
- information
- unit
- encoder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
- Optical Transform (AREA)
Abstract
【課題】高精度に位置情報を検出する。
【解決手段】エンコーダは、位置情報に応じて第1の周期信号が得られるパターンを有し、パターンによって第1の周期信号のm1周期が得られる被駆動体の所定の変位範囲において、m2周期の第2の周期信号が得られるように構成された符号板と、符号板から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力するn個の検出素子であって、被駆動体の所定の変位範囲において、配置されているn個の検出素子と、n個の出力信号に基づいて互いに周期の異なるa1周期及びa2周期が混合された第2の混合信号を生成する信号生成部と、信号生成部が生成した第2の混合信号に含まれるa1周期の信号情報とa2周期の信号情報とを分離する信号分離部と、信号分離部によって分離されたa1周期の信号情報及びa2周期の信号情報に基づいて、被駆動体の位置情報を検出する検出部とを備える。
【選択図】図2
【解決手段】エンコーダは、位置情報に応じて第1の周期信号が得られるパターンを有し、パターンによって第1の周期信号のm1周期が得られる被駆動体の所定の変位範囲において、m2周期の第2の周期信号が得られるように構成された符号板と、符号板から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力するn個の検出素子であって、被駆動体の所定の変位範囲において、配置されているn個の検出素子と、n個の出力信号に基づいて互いに周期の異なるa1周期及びa2周期が混合された第2の混合信号を生成する信号生成部と、信号生成部が生成した第2の混合信号に含まれるa1周期の信号情報とa2周期の信号情報とを分離する信号分離部と、信号分離部によって分離されたa1周期の信号情報及びa2周期の信号情報に基づいて、被駆動体の位置情報を検出する検出部とを備える。
【選択図】図2
Description
本発明は、エンコーダ、及び駆動装置に関する。
位置情報を検出するエンコーダにおいて、絶対位置情報を検出する1つの方式として、バーニア方式が知られている(例えば、特許文献1を参照)。このようなバーニア方式のエンコーダは、周期の異なる2つパターンと2系統のセンサ部とを備え、2つパターンを2系統のセンサ部によって検出した2つの周期信号の位相情報の比較により絶対位置情報を検出している。
しかしながら、上述のようなエンコーダは、例えば、高次(高調波)の歪み成分(誤差成分)の影響を受け易く、2つの周期信号に高次成分の歪み(誤差成分)が生じている場合に、生じた歪みが位置情報の誤差として検出される場合がある。
本発明は、上記問題を解決すべくなされたもので、その目的は、高精度に位置情報を検出することができるエンコーダ、及び駆動装置を提供することにある。
上記問題を解決するために、本発明の一実施形態は、被駆動体の位置情報に応じて第1の周期信号が得られるパターンを有し、前記パターンによって前記第1の周期信号のm1周期(ただしm1は2以上の整数)が得られる前記被駆動体の所定の変位範囲において、前記m1周期とは異なるm2周期(ただしm2は1以上の整数)の第2の周期信号が得られるように構成された符号板と、前記符号板から得られる前記第1の周期信号と前記第2の周期信号とを含む第1の混合信号を出力するn個の検出素子であって、前記被駆動体の所定の変位範囲において、配置されているn個の検出素子と、前記n個の出力信号に基づいて、互いに周期の異なるa1周期及びa2周期が混合された第2の混合信号を生成する信号生成部と、前記信号生成部が生成した前記第2の混合信号に含まれる前記a1周期の信号情報と前記a2周期の信号情報とを分離する信号分離部と、前記信号分離部によって分離された前記a1周期の信号情報及び前記a2周期の信号情報に基づいて、前記被駆動体の位置情報を検出する検出部とを備えることを特徴とするエンコーダである。
また、本発明の一実施形態は、上記に記載のエンコーダと、前記被駆動体を駆動する駆動部と、を備えることを特徴とする駆動装置である。
本発明によれば、高精度に位置情報を検出することができる。
以下、本発明の一実施形態によるエンコーダについて、図面を参照して説明する。
[第1の実施形態]
本実施形態では、一例として、光学式ロータリエンコーダの場合について説明する。
[第1の実施形態]
本実施形態では、一例として、光学式ロータリエンコーダの場合について説明する。
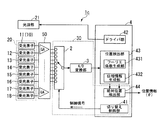
図1は、第1の実施形態によるエンコーダ1の構成の一例を示す概略構成図である。
ここで、図1(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1の正面図を示し、図1(b)は、A−A’線におけるエンコーダ1の断面図を示している。
ここで、図1(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1の正面図を示し、図1(b)は、A−A’線におけるエンコーダ1の断面図を示している。
図1において、エンコーダ1は、円盤60を有する回転子6、光センサ部20、光源部21、及び光センサ部20やその他の制御部品を搭載した基板7を備えている。
ここでは、エンコーダ1は、透過型の光学式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1は、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
ここでは、エンコーダ1は、透過型の光学式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1は、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
円盤60(符号板)は、回転子6の位置情報に応じて周期信号(第1の周期信号)が得られる明暗格子パターン61を有している。円盤60は、明暗格子パターン61によって第1の周期信号のm1周期(ただしm1は2以上の整数、例、m1=10)が得られる回転子6の所定の変位範囲(ここでは、1回転=360°の範囲)において、m1周期(例、10周期)とは異なるm2周期(ただしm2は1以上の整数、例、m2=1)の周期信号(第2の周期信号)が得られるように構成されている。円盤60は、1周期(m2=1)の第2の周期信号が得られるように、例えば、回転子6の回転中心P0と円盤60の回転中心P1とを、Y軸方向に距離L1の偏心量だけ予め偏心させて回転子6に接続されている。このように、円盤60は、後述する受光素子10が検出する信号を、例えば、強度変調させることによって第2の周期信号が得られるように構成されている。すなわち、円盤60は、回転子6の回転中心P0に対して偏心させて配置されている明暗格子パターン61に基づいて、第2の周期信号が得られるように受光素子10(光センサ部20)が検出する信号を変調させる。
明暗格子パターン61(パターン)は、回転子6(被駆動体)の1回転に10個(10極)の明暗格子(刻線)を備えている。すなわち、明暗格子パターン61は、回転子6の360°の範囲(所定の変位範囲)に対して、10個の明暗格子を備えている。明暗格子パターン61は、例えば、回転子6の360°の範囲でm1周期(ここでは、m1=10周期)の周期信号(第1の周期信号)が得られるように、円盤60の同心円上(同一円周上)に形成されている。すなわち、明暗格子パターン61は周期的なパターンである。
なお、明暗格子パターン61は、円盤60がY軸方向に距離L1だけ偏心しているため、Y軸方向の回転子6の回転中心P0からの距離L2及びL3が異なるように配置されている。例えば、図1における回転位置では、距離L3は、距離L2と2倍の距離L1とを加算した距離に等しい。例えば、明暗格子パターン61は、第2の周期信号が得られるように、回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)に偏心させて配置されている。ここで、この偏心されて配置されている明暗格子パターン61は、第2の周期信号が得られるように、後述する受光素子10が検出する信号を、例えば、強度変調させる変調部に対応する。
なお、明暗格子パターン61は、円盤60がY軸方向に距離L1だけ偏心しているため、Y軸方向の回転子6の回転中心P0からの距離L2及びL3が異なるように配置されている。例えば、図1における回転位置では、距離L3は、距離L2と2倍の距離L1とを加算した距離に等しい。例えば、明暗格子パターン61は、第2の周期信号が得られるように、回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)に偏心させて配置されている。ここで、この偏心されて配置されている明暗格子パターン61は、第2の周期信号が得られるように、後述する受光素子10が検出する信号を、例えば、強度変調させる変調部に対応する。
なお、上述の周期の数(サイクル数)m1は、2以上の整数であり、回転子6の360°の範囲における明暗格子パターン61の極数(刻線数)に対応する。なお、サイクル数とは、周期信号における1周期の数を示す。
光源部21は、例えば、レーザ光を射出するレーザダイオードなどの発光素子であり、後述するドライバ部42から供給された駆動信号に基づいて、照射光(レーザ光)を明暗格子パターン61に照射する。
光センサ部20(センサ部)は、n個(例、n=8個)の受光素子11〜18を備える受光素子群である。光センサ部20は、光源部21から照射された照射光を、明暗格子パターン61を介して受光する。
受光素子11〜18は、例えば、フォトダイオードなどである。ここで、受光素子11〜18のうちの任意の受光素子、又は単にエンコーダ1が備える受光素子を示す場合には、受光素子10(検出素子)と称して以下説明する。
受光素子11〜18は、例えば、フォトダイオードなどである。ここで、受光素子11〜18のうちの任意の受光素子、又は単にエンコーダ1が備える受光素子を示す場合には、受光素子10(検出素子)と称して以下説明する。
受光素子11〜18は、上述した明暗格子パターン61を検出することにより、円盤60から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。すなわち、8個の受光素子11〜18は、明暗格子パターン61、及び、上述した円盤60の偏心に基づいて、第1の混合信号を出力する。
例えば、上述した回転子6の360°の範囲(所定の変位範囲)を回転子6が変位した場合に、受光素子11〜18は、それぞれ10周期(m1=10)の周期信号と1周期(m2=1)の周期信号とが混合された混合信号(第1の混合信号)を出力する。ここで、m1周期は、(m1>n/2)の条件を満たす。
例えば、上述した回転子6の360°の範囲(所定の変位範囲)を回転子6が変位した場合に、受光素子11〜18は、それぞれ10周期(m1=10)の周期信号と1周期(m2=1)の周期信号とが混合された混合信号(第1の混合信号)を出力する。ここで、m1周期は、(m1>n/2)の条件を満たす。
また、受光素子11〜18は、例えば、上述した回転子6の360°の範囲(所定の変位範囲)において、均等に配置されている。すなわち、受光素子11〜18は、例えば、回転子6の360°の範囲において等間隔(45°間隔)に配置されている。ここで、受光素子11〜18は、例えば、回転子6の1周(1回転)の電気角0°、45°、90°、135°、180°、225°、270°、及び315°の信号を取得できるように配置されている。なお、上述した「均等」には、「略均等」が含まれる。ここで、受光素子10の円周方向のサイズは、例えば、明暗格子パターン61の1ピッチ分(明暗格子1ピッチ分)よりも小さく定められている。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、8個)の受光素子10は、回転子6の全変位範囲において均等に配置されている。
また、8個の受光素子11〜18は、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、8個)の受光素子10は、回転子6の全変位範囲において均等に配置されている。
また、8個の受光素子11〜18は、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
この図1において、回転子6(被駆動体)がZ軸方向の回転軸を中心として回転すると、回転子6の回転に伴い円盤60(明暗格子パターン61)が回転し、受光素子11〜18で検出される光の強度が変化する。エンコーダ1は、この光の強度変化を、受光素子11〜18の8個の受光素子10によりそれぞれ検出し、この検出した光の強度変化量から回転子6の位置情報(例えば、絶対位置情報)を検出する。
図2は、本実施形態におけるエンコーダ1の構成を示すブロック図である。
図2において、エンコーダ1は、光センサ部20、光源部21、スイッチ部2、A/D(アナログ/デジタル)変換部3、及び信号処理部4を備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。
図2において、エンコーダ1は、光センサ部20、光源部21、スイッチ部2、A/D(アナログ/デジタル)変換部3、及び信号処理部4を備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。
スイッチ部2(切り替え部)は、例えば、少なくとも8つの第1の端子と、1つの第2の端子とを備えているアナログスイッチである。スイッチ部2の第1の端子には、8個の受光素子10のそれぞれの出力信号線が接続されている。スイッチ部2は、後述する信号処理部4の切り替え制御部41から出力される制御信号に基づいて、8つの第1の端子のうちのいずれか1つの端子が選択され、この選択された第1の端子と、第2の端子とが接続される。すなわち、スイッチ部2は、切り替え制御部41から出力される制御信号に基づいて、受光素子11〜18のうちのいずれか1つの出力信号を、A/D変換部3に出力する。スイッチ部2は、例えば、8個の出力信号を所定の順番により切り替えて逐次出力する。
A/D変換部3は、例えば、所定のサンプリング周期により、アナログ信号をデジタル信号に変換するアナログ/デジタル変換回路(A/Dコンバータ)である。A/D変換部3は、スイッチ部2から出力された受光素子10の出力信号であるアナログ信号を、デジタル信号に変換した出力信号を信号処理部4に出力する。
信号処理部4は、エンコーダ1の信号処理を実行する。信号処理部4は、切り替え制御部41、ドライバ部42、信号分離部43、及び絶対位置検出部44を備えている。
ドライバ部42は、光源部21の発光を駆動する駆動信号(例えば、駆動電流)を生成し、生成した駆動信号を光源部21に供給する。
切り替え制御部41は、スイッチ部2の切り替え信号(選択信号)である制御信号を生成する。すなわち、切り替え制御部41は、制御信号を出力し、受光素子11〜18の出力信号を例えば、時計回りの順に切り替えることにより、スイッチ部2に受光素子11〜18の各出力信号を順次出力(逐次出力)させる。
なお、逐次出力とは、例えば、受光素子11〜18の各出力信号を順次(逐次)出力させることである。本実施形態では、切り替え制御部41は、一例として、受光素子11の出力信号から受光素子18の出力信号の順に(順番に)、出力信号を切り替えて出力する。ここで、「順に」又は「順次(逐次)」又は「順番に」とは、「時系列的に」、または、「複数の中から1つずつ選択的に」という意味である。
なお、逐次出力とは、例えば、受光素子11〜18の各出力信号を順次(逐次)出力させることである。本実施形態では、切り替え制御部41は、一例として、受光素子11の出力信号から受光素子18の出力信号の順に(順番に)、出力信号を切り替えて出力する。ここで、「順に」又は「順次(逐次)」又は「順番に」とは、「時系列的に」、または、「複数の中から1つずつ選択的に」という意味である。
また、本実施形態において、切り替え制御部41と、スイッチ部2と、A/D変換部3とは、信号生成部30に対応する。
信号生成部30は、n個(例、n=8)の受光素子11〜18が出力するn個(例、n=8)の出力信号に基づいて、互いに周期の異なるa1周期(例、2周期)及びa2周期(例、3周期)が混合された第2の混合信号を生成する。すなわち、信号生成部30は、上述した第1の混合信号に基づいて、8個の受光素子10をスイッチ部2により順次出力させて、a1周期(例、2周期)及びa2周期(例、3周期)を含む第2の混合信号を生成する。ここで、信号生成部30は、離散フーリエ変換におけるエイリアシングを利用することにより、10周期(m1=10)の周期信号と1周期(m2=1)の周期信号とを含む第1の混合信号である8個(n=8)の出力信号により、第2の混合信号を生成する。また、a1周期及びa2周期は、上述したm1周期及びm2周期よりも低次の周期の数である。なお、離散フーリエ変換におけるエイリアシングについては後述する。信号生成部30は、第2の混合信号を信号処理部4に出力する。
信号生成部30は、n個(例、n=8)の受光素子11〜18が出力するn個(例、n=8)の出力信号に基づいて、互いに周期の異なるa1周期(例、2周期)及びa2周期(例、3周期)が混合された第2の混合信号を生成する。すなわち、信号生成部30は、上述した第1の混合信号に基づいて、8個の受光素子10をスイッチ部2により順次出力させて、a1周期(例、2周期)及びa2周期(例、3周期)を含む第2の混合信号を生成する。ここで、信号生成部30は、離散フーリエ変換におけるエイリアシングを利用することにより、10周期(m1=10)の周期信号と1周期(m2=1)の周期信号とを含む第1の混合信号である8個(n=8)の出力信号により、第2の混合信号を生成する。また、a1周期及びa2周期は、上述したm1周期及びm2周期よりも低次の周期の数である。なお、離散フーリエ変換におけるエイリアシングについては後述する。信号生成部30は、第2の混合信号を信号処理部4に出力する。
ここで、a1周期及びa2周期は、|a1|=(m1−k×n)及び|a2|=(m1−k×n±m2)の条件を満たす(ただし、kは1以上の整数)。また、a2の値は、例えば、(a1±1)になるように定められている。なお、a1周期及びa2周期は整数であり、a1の値又はa2の値がマイナスの場合は、後述する離散フーリエ変換におけるエイリアシングで出現する処理信号の位相が180°回転していることを示す。
本実施形態では、例えば、a1周期は2周期(=(10−1×8))であり、a2周期は3周期(=(10−1×8+1))である(k=1)。この場合、周期の数a2の値は、(a1±1)を満たすように、“3”に定められている。
また、例えば、上述のa1周期は、(n/2>|a1|>m2)の条件を満たす、又は、a2周期は、(n/2>|a2|)の条件を満たす。
本実施形態では、例えば、a1周期は2周期(=(10−1×8))であり、a2周期は3周期(=(10−1×8+1))である(k=1)。この場合、周期の数a2の値は、(a1±1)を満たすように、“3”に定められている。
また、例えば、上述のa1周期は、(n/2>|a1|>m2)の条件を満たす、又は、a2周期は、(n/2>|a2|)の条件を満たす。
信号分離部43は、信号生成部30が生成した第2の混合信号に含まれるa1周期(a1=2)の信号情報とa2周期(a2=3)の信号情報とを分離する。信号分離部43は、例えば、上述の第2の混合信号に基づいて、a1周期の処理信号(ここでは、2次高調波信号)における第1の位相情報をa1周期の信号情報として生成するとともに、a2周期の処理信号(ここでは、3次高調波信号)における第2の位相情報をa2周期の信号情報として生成する。また、信号分離部43は、例えば、上述の第2の混合信号に基づいて、a1周期に対応する第1の次数(例、2次)のフーリエ係数及びa2周期に対応する第2の次数(例、3次)のフーリエ係数を生成する。信号分離部43は、生成した第1の次数のフーリエ係数に基づいて第1の位相情報を生成するとともに、生成した第2の次数のフーリエ係数に基づいて第2の位相情報を生成する。
なお、本実施形態の第1の位相情報における位相情報θは、電気角のことであり、機械角36°(=360/10)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第1の位相情報は10θ変位する。また、第2の位相情報における位相情報θは、電気角のことであり、機械角32.73°(=360/11)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第2の位相情報は11θ変位する。ここで、フーリエ係数に基づいて位相情報(位置情報)を検出する方式を「逆フーリエ変換方式」と称する。
また、信号分離部43は、フーリエ係数生成部431及び位相情報生成部432を備えている。
また、信号分離部43は、フーリエ係数生成部431及び位相情報生成部432を備えている。
フーリエ係数生成部431は、例えば、第2の混合信号における8個の出力信号に基づいて、a1周期に対応する次数(例えば、2次)のフーリエ係数(a2、b2)を生成する。また、フーリエ係数生成部431は、例えば、第2の混合信号における8個の出力信号に基づいて、a2周期に対応する次数(例えば、2次)のフーリエ係数(a3、b3)を生成する。フーリエ係数生成部431は、生成したフーリエ係数を位相情報生成部432に出力する。
位相情報生成部432は、フーリエ係数生成部431が生成したa1周期に対応する次数(例、2次)のフーリエ係数(a2、b2)に基づいて回転子6の第1の位相情報(10θ)を生成(検出)する。また、位相情報生成部432は、a2周期に対応する次数(例、3次)のフーリエ係数(a3、b3)に基づいて回転子6の第2の位相情報(11θ)を生成(検出)する。位相情報生成部432は、生成した第1の位相情報、及び第2の位相情報を絶対位置検出部44に出力する。
なお、信号分離部43(フーリエ係数生成部431及び位相情報生成部432)による第1の位相情報、及び第2の位相情報の生成方法の一例については、後述する。
なお、信号分離部43(フーリエ係数生成部431及び位相情報生成部432)による第1の位相情報、及び第2の位相情報の生成方法の一例については、後述する。
絶対位置検出部44(検出部)は、信号分離部43によって分離された上述のa1周期の信号情報及びa2周期の信号情報に基づいて、回転子6の位置情報(例えば、絶対位置情報)を検出する。絶対位置検出部44は、例えば、信号分離部43が生成した第1の位相情報及び第2の位相情報に基づいて、回転子6の絶対位置を示す位置情報(絶対位置情報)を検出する。なお、本実施形態では、絶対位置検出部44は、第1の位相情報(10θ)、及び第2の位相情報(11θ)に基づいて機械角360°の絶対位置情報(θ)を検出する。絶対位置検出部44は、生成した位置情報(θ)をエンコーダ1の外部に出力する。
次に、光センサ部20が出力する第1の混合信号、及び離散フーリエ変換におけるエイリアシングについて説明する。
図3は、本実施形態における光センサ部20の出力信号を説明する図である。
図3は、本実施形態における光センサ部20の出力信号を説明する図である。
図3(a)は、本実施形態における光センサ部20の出力信号を示している。この図3(a)における光センサ部20の出力信号は、10周期の周期信号(第1の周期信号)と、上述した偏心により信号強度を変調させた1周期の周期信号(第2の周期信号)を混合した混合信号(第1の混合信号)となる。ここで、波形W1は、例えば、回転子6を360°回転させた場合における1個の受光素子10(例、受光素子11)の出力波形を示している。
また、出力PD1〜PD8は、回転子6が静止している場合における受光素子11〜18に対応する出力信号を示している。この8個の出力PD1〜PD8は、離散フーリエ変換におけるエイリアシングによって、波形W2に示すようなa1周期(a1=2)とa2周期(a2=3)とを含む混合信号(第2の混合信号)として検出される。すなわち、この波形W2は、10周期の周期信号と1周期の周期信号との混合信号を8個の受光素子10により検出したものであるが、結果として離散フーリエ変換におけるエイリアシングが発生するため、あたかもa1周期(a1=2)とa2周期(a2=3)とを含む混合信号(第2の混合信号)を観測したようにみえる。
ここで「エイリアシング(折り返し歪)」とは、例えば、信号波形が所定のサンプリング周波数(fs)でサンプリングされている場合、信号の周波数が(fs/2)よりも大きくなると、信号とは異なる周波数の信号が現れる現象である。本実施形態では、信号波形がm1周期の周期信号に対応し、周期の数(サイクル数)m1が周期信号の空間周波数(空間情報)に対応する。また、サンプリング周波数(fs)は、受光素子10の個数であるn個に対応する。このことから、m1周期は、受光素子10の数nの二分の一より大きい値である。例えば、受光素子10の数が8個の場合に、m1周期は、4以上にする必要がある。また、この「エイリアシング」を利用して、m1周期の周期信号から信号処理の容易なm1周期より低次のa1周期の処理信号を検出するために、a1周期、m1周期、及びn個の値は、上述したように、|a1|=(m1−k×n)を満たすように設定されている。また、a2周期、m1周期、m2周期、及びn個の値は、上述したように、|a2|=(m1−k×n±m2)を満たすように設定されている。
なお、上述した偏心のない場合における受光素子10の出力信号(出力PD)は、下記の式(1)として示される。ここでは、式(1)は、10周期(例、m1=10)の周期信号を表している。

また、上述した偏心による信号強度の変調波形は、変調情報として、下記の式(2)によって示される。ここでは、式(2)は、1周期(例、m2=1)の周期信号を表している。
本実施形態における受光素子10の出力信号(出力PD)は、上述の式(1)と式(2)とを積算した下記の式(3)によって示される。この式(3)は、波形W1に示すような、上述した第1の混合信号を表している。
式(3)において、第2項及び第3項が基本波(1次)成分に対応し、第4項が2次成分(2次高調波成分)に対応し、第5項が3次成分(3次高調波成分)に対応する。
ここで、第2項の(cos(θ))は基本波情報であるが、第3項の(1/2・sin(9θ))は、8個の受光素子10による検出によりエイリアシングが発生するため、同様に基本波情報となる。なお、基本波情報には、第2項及び第3項の2つの情報が混在するので、リニアリティ(直線性)が確保できないため、本実施形態におけるエンコーダ1は、処理信号として選択しない。また、第4項の(sin(10θ))及び第5項の(1/2・sin(11θ))は、第3項と同様にエイリアシングが発生するため、2次成分情報及び3次成分情報が得られることになる。この場合、格子情報である明暗格子パターン61は、10極の明暗格子であるが、明暗格子パターン61を偏心させることにより、式(3)に示すように、あたかも11極の明暗格子であるような出力信号を得ることができる。
ここで、第2項の(cos(θ))は基本波情報であるが、第3項の(1/2・sin(9θ))は、8個の受光素子10による検出によりエイリアシングが発生するため、同様に基本波情報となる。なお、基本波情報には、第2項及び第3項の2つの情報が混在するので、リニアリティ(直線性)が確保できないため、本実施形態におけるエンコーダ1は、処理信号として選択しない。また、第4項の(sin(10θ))及び第5項の(1/2・sin(11θ))は、第3項と同様にエイリアシングが発生するため、2次成分情報及び3次成分情報が得られることになる。この場合、格子情報である明暗格子パターン61は、10極の明暗格子であるが、明暗格子パターン61を偏心させることにより、式(3)に示すように、あたかも11極の明暗格子であるような出力信号を得ることができる。
なお、図3(b)は、上述の波形W2を周波数解析した場合における基本波成分(波形W3)、2次高調波成分(波形W4)、及び3次高調波成分(波形W5)を示している。波形W3〜W5及び式(3)に示されるように、第2の混合信号は、基本波成分、2次高調波成分及び3次高調波成分により構成されている。
このように、本実施形態では、この「エイリアシング」を利用することにより、10周期(m1=10)の周期信号と1周期(m2=1)の周期信号との混合信号(第1の混合信号)から、2周期(a1=2)の処理信号、及び3周期(a2=3)の処理信号を含む混合信号(第2の混合信号)を検出することが可能である。
この場合、8個の出力PD1〜PD8は、離散フーリエ変換におけるエイリアシングによって、波形W2に示すようなa1周期(a1=2)の処理信号(2次の高調波信号)とa2周期(a2=3)の処理信号(3次の高調波信号)とを混合した混合信号(第2の混合信号)して検出される。すなわち、この波形W2は、10周期と1周期とを含む混合信号を8個の受光素子10により検出したものであるが、結果として離散フーリエ変換におけるエイリアシングが発生するため、あたかも1周期と2周期と3周期とを含む混合信号を観測したようにみえる。
この場合、8個の出力PD1〜PD8は、離散フーリエ変換におけるエイリアシングによって、波形W2に示すようなa1周期(a1=2)の処理信号(2次の高調波信号)とa2周期(a2=3)の処理信号(3次の高調波信号)とを混合した混合信号(第2の混合信号)して検出される。すなわち、この波形W2は、10周期と1周期とを含む混合信号を8個の受光素子10により検出したものであるが、結果として離散フーリエ変換におけるエイリアシングが発生するため、あたかも1周期と2周期と3周期とを含む混合信号を観測したようにみえる。
ここで、上述した出力PD1〜PD8は、下記の式(4)として表される。
次に、本実施形態におけるエンコーダ1の動作の一例について説明する。
図4は、本実施形態におけるエンコーダ1の絶対位置情報の検出動作を説明する図である。
図4において、まず、光センサ部20は、波形W6に示すように、10極格子(10極の明暗格子)の空間情報(g2(θ2))と強度変調の空間情報(g1(θ1))とを含む第1の混合信号である混合空間情報(g1(θa)+g1(θb)+g2(θ2)+g3(θ3))を出力する。ここで、関数g1は1次成分を示し、関数g2は2次成分を示し、関数g3は3次成分を示す。また、変数θa及び変数θbは、基本波成分による位置情報(位相情報)を示す。また、変数θ2は、2次高調波成分による位相情報を示し、変数θ3は、3次高調波成分による位相情報を示す。
図4は、本実施形態におけるエンコーダ1の絶対位置情報の検出動作を説明する図である。
図4において、まず、光センサ部20は、波形W6に示すように、10極格子(10極の明暗格子)の空間情報(g2(θ2))と強度変調の空間情報(g1(θ1))とを含む第1の混合信号である混合空間情報(g1(θa)+g1(θb)+g2(θ2)+g3(θ3))を出力する。ここで、関数g1は1次成分を示し、関数g2は2次成分を示し、関数g3は3次成分を示す。また、変数θa及び変数θbは、基本波成分による位置情報(位相情報)を示す。また、変数θ2は、2次高調波成分による位相情報を示し、変数θ3は、3次高調波成分による位相情報を示す。
次に、信号生成部30は、スイッチ部2が8個の出力信号を所定の順番により切り替えて逐次出力し、スイッチ部2から出力する逐次出力信号に基づいて、波形W7に示すような第2の混合信号である低次混合空間情報(f1(t,θa)+f2(t,θb)+f2(t,θ2)+f3(t,θ3))を生成する。すなわち、切り替え制御部41は、制御信号を出力し、受光素子11〜18の出力信号を例えば、時計回りの順に切り替えることにより、スイッチ部2に受光素子11〜18の各出力信号を順次出力(逐次出力)させる。このように、信号生成部30は、スイッチ部2を8個の出力信号を所定の順番により切り替えて逐次出力し、スイッチ部2から出力する逐次出力信号に基づいて、第2の混合信号を生成する。ここで、変数tは、時間を示している。
なお、本実施形態では、信号生成部30は、第2の混合信号を、A/D変換部3を介して出力PD1〜PD8のデジタル値として信号分離部43に出力する。
なお、本実施形態では、信号生成部30は、第2の混合信号を、A/D変換部3を介して出力PD1〜PD8のデジタル値として信号分離部43に出力する。
次に、信号分離部43は、信号生成部30が生成した第2の混合信号に含まれるa1周期(a1=2)の信号情報とa2周期(a2=3)の信号情報とを分離する。すなわち、信号分離部43は、第2の混合信号から2次高調波の位相情報(f2(t,θ2))を分離するとともに、第2の混合信号から3次高調波の位相情報(f3(t,θ3))を分離する。例えば、信号分離部43は、第2の混合信号に基づいて、波形W8に示すような2次高調波信号と、波形W9に示すような3次高調波信号とに分離し、分離したそれぞれの信号の位相情報を検出する。
なお、本実施形態では、信号分離部43は、逆フーリエ変換方式により位相情報を生成する。例えば、フーリエ係数生成部431は、第2の混合信号に基づいて、2次のフーリエ係数(a2、b2)を生成する。また、フーリエ係数生成部431は、例えば、第2の混合信号に基づいて、3次のフーリエ係数(a3、b3)を生成する。フーリエ係数生成部431は、生成したフーリエ係数を位相情報生成部432に出力する。
位相情報生成部432は、フーリエ係数生成部431が生成した2次のフーリエ係数(a2、b2)に基づいて回転子6の第1の位相情報(θ2=10θ)を生成する。また、位相情報生成部432は、3次のフーリエ係数(a3、b3)に基づいて回転子6の第2の位相情報(θ3=11θ)を生成する。位相情報生成部432は、生成した第1の位相情報、及び第2の位相情報を絶対位置検出部44に出力する。
位相情報生成部432は、フーリエ係数生成部431が生成した2次のフーリエ係数(a2、b2)に基づいて回転子6の第1の位相情報(θ2=10θ)を生成する。また、位相情報生成部432は、3次のフーリエ係数(a3、b3)に基づいて回転子6の第2の位相情報(θ3=11θ)を生成する。位相情報生成部432は、生成した第1の位相情報、及び第2の位相情報を絶対位置検出部44に出力する。
次に、絶対位置検出部44は、信号分離部43(位相情報生成部432)が分離(生成)した第1の位相情報(θ2)及び第2の位相情報(θ3)を比較することにより、絶対位置情報(ここでは、360°の範囲の絶対位置情報(ABS出力))を検出する。
次に、本実施形態における絶対位置情報の検出処理の一例を説明する。
まず、信号分離部43のフーリエ係数生成部431は、上述した式(4)に示す8個の出力信号(出力PD1〜PD8)に基づいて、基本波のフーリエ係数(a2、b2)を生成する。この場合、フーリエ係数生成部431は、下記の式(5)に基づいて、基本波のフーリエ係数a1を生成する。
まず、信号分離部43のフーリエ係数生成部431は、上述した式(4)に示す8個の出力信号(出力PD1〜PD8)に基づいて、基本波のフーリエ係数(a2、b2)を生成する。この場合、フーリエ係数生成部431は、下記の式(5)に基づいて、基本波のフーリエ係数a1を生成する。
ここで、式(5)におけるf1(θ)〜f8(θ)は、式(4)の出力PD1〜PD8に対応する。また、式(5)におけるcos(0)、cos(2π/4)、cos(4π/4)、cos(6π/4)、cos(8π/4)、cos(10π/4)、cos(12π/4)、及びcos(14π/4)は、フーリエ係数a2を算出する際に用いる定数である。
また、フーリエ係数生成部431は、下記の式(6)に基づいて、基本波のフーリエ係数b2を生成する。
ここで、式(6)におけるf1(θ)〜f8(θ)は、式(4)の出力PD1〜PD8に対応する。また、式(3)におけるsin(0)、sin(2π/4)、sin(4π/4)、sin(6π/4)、sin(8π/4)、sin(10π/4)、sin(12π/4)、及びsin(14π/4)は、フーリエ係数b2を算出する際に用いる定数である。
なお、式(5)及び式(6)における「4」は、一例として、受光素子10の数「8」を「2」で除算した値を用いているが、必ずしも「4」を用いなくてもよい。
なお、式(5)及び式(6)における「4」は、一例として、受光素子10の数「8」を「2」で除算した値を用いているが、必ずしも「4」を用いなくてもよい。
次に、位相情報生成部432は、フーリエ係数生成部431が生成したフーリエ係数(a2、b2)と、下記の式(7)とに基づいて第1の位相情報(10θ)を2次高調波の位相情報として検出する。
また、フーリエ係数生成部431は、上述した式(4)に示す8個の出力信号(出力PD1〜PD8)に基づいて、3次のフーリエ係数(a3、b3)を生成する。この場合、フーリエ係数生成部431は、下記の式(8)に基づいて、3次のフーリエ係数a3を生成する。
ここで、式(8)におけるf1(θ)〜f8(θ)は、式(4)の出力PD1〜PD8に対応する。また、式(8)におけるcos(0)、cos(3π/4)、cos(6π/4)、cos(9π/4)、cos(12π/4)、cos(15π/4)、cos(18π/4)、及びcos(21π/4)は、フーリエ係数a3を算出する際に用いる定数である。
また、フーリエ係数生成部431は、下記の式(9)に基づいて、2次のフーリエ係数b2を生成する。
ここで、式(9)におけるf1(θ)〜f8(θ)は、式(4)の出力PD1〜PD8に対応する。また、式(9)におけるsin(0)、sin(3π/4)、sin(6π/4)、sin(9π/4)、sin(12π/4)、sin(15π/4)、sin(18π/4)、及びsin(21π/4)は、フーリエ係数b3を算出する際に用いる定数である。
なお、式(8)及び式(9)における「4」は、一例として、受光素子10の数「8」を「2」で除算した値を用いているが、必ずしも「4」を用いなくてもよい。
なお、式(8)及び式(9)における「4」は、一例として、受光素子10の数「8」を「2」で除算した値を用いているが、必ずしも「4」を用いなくてもよい。
次に、位相情報生成部432は、フーリエ係数生成部431が生成したフーリエ係数(a3、b3)と、下記の式(10)とに基づいて第2の位相情報(11θ)を3次高調波の位相情報として検出する。
次に、絶対位置検出部44は、下記の式(11)に示すように、信号分離部43が分離(生成)した第1の位相情報(10θ)と第2の位相情報(11θ)との差分により、回転子6の360°の範囲における絶対位置情報(θ)を検出する。
以上、説明したように、本実施形態におけるエンコーダ1は、円盤60が、回転子6の位置情報に応じて第1の周期信号が得られる明暗格子パターン61を有する。円盤60は、明暗格子パターン61によって第1の周期信号のm1周期(例、10周期)が得られる回転子6の所定の変位範囲(例、1回転=360°の範囲)において、m1周期とは異なるm2周期(例、1周期)の第2の周期信号が得られるように構成されている。ただし、周期の数m1は2以上の整数であり、周期の数m2は1以上の整数である。また、n個(例、8個)の受光素子10は、回転子6の所定の変位範囲において、均等に配置されており、円盤60から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。信号生成部30は、n個の出力信号に基づいて、互いに周期の異なるa1周期(例、2周期)及びa2周期(例、3周期)が混合された第2の混合信号を生成する。信号分離部43は、信号生成部30が生成した第2の混合信号に含まれるa1周期の信号情報(例、2次高調波の位相情報(10θ))とa2周期の信号情報(例、3次高調波の位相情報(11θ))とを分離する。そして、絶対位置検出部44は、信号分離部43によって分離されたa1周期の信号情報及びa2周期の信号情報に基づいて、回転子6の位置情報を検出する。
これにより、本実施形態におけるエンコーダ1は、例えば、m1周期より低次のa1周期の信号情報とa2周期の信号情報とを分離するので、高次(高調波)の歪み成分(誤差成分)を処理から分離することができる。そのため、本実施形態におけるエンコーダ1は、高次の歪成分を低減することができる。なお、高次(高調波)の歪み成分(誤差成分)には、1回転中の円盤60に起因した歪み成分も含まれ、本実施形態におけるエンコーダ1は、同様に、円盤60に起因した歪み成分を低減することができる。よって、本実施形態におけるエンコーダ1は、高精度に位置情報を検出することができる。
また、本実施形態におけるエンコーダ1は、n個(例、8個)の受光素子10が、第1の周期信号と第2の周期信号とを含む第1の混合信号を出力するので、第1の周期信号と第2の周期信号との2系統のn個の受光素子10(光センサ部20)を備える必要がない。また、円盤60は、1つの明暗格子パターン61により第1の混合信号を生成することができるように構成されているので、周期の異なる2種類のパターン(例、明暗格子パターン)を備える必要がない。そのため、本実施形態におけるエンコーダ1は、n個の受光素子10(光センサ部20)を1系統に共有化することができるとともに、明暗格子パターン61を1つ(1トラック)にすることができる。よって、本実施形態におけるエンコーダ1は、構成を簡略化するとともに、高精度に位置情報を検出することができる。
なお、本実施形態におけるエンコーダ1は、一般的には忌避される偏心や強度変調を利用してインクリメンタルの分解能を維持しつつエンコーダ性能を絶対値化するものであり、バーニア方式などにおいて通常2系統必要なセンサ部や処理回路を1系統で構成した画期的な方式である。
なお、本実施形態におけるエンコーダ1は、一般的には忌避される偏心や強度変調を利用してインクリメンタルの分解能を維持しつつエンコーダ性能を絶対値化するものであり、バーニア方式などにおいて通常2系統必要なセンサ部や処理回路を1系統で構成した画期的な方式である。
また、本実施形態では、円盤60は、受光素子10が検出する信号を変調させることによって上述した第2の周期信号が得られるように構成されている。例えば、円盤60は、第2の周期信号が得られるように、受光素子10が検出する信号を強度変調させる変調部(偏心されて配置されている明暗格子パターン61)を備えている。
これにより、円盤60は、明暗格子の極数とは異なる手段により受光素子10が検出する信号を変調させることによって第2の周期信号を得ることができる。そのため、本実施形態におけるエンコーダ1は、1つの明暗格子パターン61により第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1は、明暗格子パターン61を1つ(1トラック)にすることができる。
これにより、円盤60は、明暗格子の極数とは異なる手段により受光素子10が検出する信号を変調させることによって第2の周期信号を得ることができる。そのため、本実施形態におけるエンコーダ1は、1つの明暗格子パターン61により第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1は、明暗格子パターン61を1つ(1トラック)にすることができる。
また、本実施形態では、明暗格子パターン61は、第2の周期信号が得られるように、回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)に偏心させて配置されている。円盤60は、偏心させて配置されている明暗格子パターン61に基づいて、第2の周期信号が得られるように受光素子10が検出する信号を変調させる。
これにより、明暗格子パターン61を有する円盤60を偏心させることにより、第2の周期信号を得ることができるので、本実施形態におけるエンコーダ1は、簡易な構成により、第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1は、簡易な構成により、高精度に位置情報を検出することができる。
これにより、明暗格子パターン61を有する円盤60を偏心させることにより、第2の周期信号を得ることができるので、本実施形態におけるエンコーダ1は、簡易な構成により、第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1は、簡易な構成により、高精度に位置情報を検出することができる。
また、本実施形態では、m1周期は、(m1>n/2)の条件を満たし、a1周期及びa2周期は、|a1|=(m1−k×n)及び|a2|=(m1−k×n±m2)の条件を満たす。ただし、kは1以上の整数である。
これにより、本実施形態におけるエンコーダ1は、上述した離散フーリエ変換のエイリアシングを利用して、a1周期(例、1周期)及びa2周期(例、2周期)を含む第2の混合信号を容易に生成することができる。
これにより、本実施形態におけるエンコーダ1は、上述した離散フーリエ変換のエイリアシングを利用して、a1周期(例、1周期)及びa2周期(例、2周期)を含む第2の混合信号を容易に生成することができる。
また、本実施形態では、a1周期は、(n/2>|a1|>m2)の条件を満たす、又は、a2周期は、(n/2>|a2|)の条件を満たす。この条件を満たすように、a1周期又はa2周期を選択することにより、本実施形態におけるエンコーダ1は、高精度に位置情報を処理するために有効な処理信号の次数を適切に設定することができる。よって、本実施形態におけるエンコーダ1は、高精度に位置情報を検出することができる。
また、本実施形態では、a2の値は、(a1±1)になるように定められている。
これにより、a1周期の処理信号とa2の処理信号とは、次数を“1”ずらして設定されるので、本実施形態におけるエンコーダ1は、バーニア方式を利用して正確な絶対位置情報を検出することができる。
これにより、a1周期の処理信号とa2の処理信号とは、次数を“1”ずらして設定されるので、本実施形態におけるエンコーダ1は、バーニア方式を利用して正確な絶対位置情報を検出することができる。
また、本実施形態では、回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)であり、n個(例、8個)の検出素子は、回転子6の全変位範囲(360°の範囲)において均等に配置されている。
これにより、本実施形態におけるエンコーダ1は、回転子6の全変位範囲(例、1回転(360°))における絶対位置情報を高精度に検出することができる。
これにより、本実施形態におけるエンコーダ1は、回転子6の全変位範囲(例、1回転(360°))における絶対位置情報を高精度に検出することができる。
また、本実施形態では、信号分離部43は、第2の混合信号に基づいて、a1周期(例、2周期)の処理信号における第1の位相情報(例、10θ)をa1周期の信号情報として生成するとともに、a2周期(例、3周期)の処理信号における第2の位相情報(例、11θ)をa2周期の信号情報として生成する。絶対位置検出部44は、信号分離部43が生成した第1の位相情報(例、10θ)及び第2の位相情報(例、11θ)に基づいて、回転子6の絶対位置情報(例、θ)を検出する。
これにより、本実施形態におけるエンコーダ1は、バーニア方式を利用して、簡易な手段により、高精度に位置情報を検出することができる。
これにより、本実施形態におけるエンコーダ1は、バーニア方式を利用して、簡易な手段により、高精度に位置情報を検出することができる。
また、本実施形態では、信号分離部43は、第2の混合信号に基づいて、a1周期に対応する第1の次数(例、2次)のフーリエ係数(a2、b2)及びa2周期に対応する第2の次数(例、3次)のフーリエ係数(a3、b3)を生成する。信号分離部43は、生成した第1の次数のフーリエ係数(a2、b2)に基づいて第1の位相情報(例、10θ)を生成するとともに、生成した第2の次数のフーリエ係数(a3、b3)に基づいて第2の位相情報(例、11θ)を生成する。
これにより、本実施形態におけるエンコーダ1は、簡易な構成により、第1の位相情報及び第2の位相情報を正確に検出することができる。したがって、本実施形態におけるエンコーダ1は、簡易な構成により、高精度に位置情報を検出することができる。
これにより、本実施形態におけるエンコーダ1は、簡易な構成により、第1の位相情報及び第2の位相情報を正確に検出することができる。したがって、本実施形態におけるエンコーダ1は、簡易な構成により、高精度に位置情報を検出することができる。
次に、第2の実施形態について、図面を参照して説明する。
[第2の実施形態]
第1の実施形態におけるエンコーダ1は、逆フーリエ変換方式を用いて位置情報を検出する場合を説明したが、本実施形態におけるエンコーダ1aは、後述する位相変調方式(逐次排出方式)を用いて位置情報を検出する場合について説明する。
[第2の実施形態]
第1の実施形態におけるエンコーダ1は、逆フーリエ変換方式を用いて位置情報を検出する場合を説明したが、本実施形態におけるエンコーダ1aは、後述する位相変調方式(逐次排出方式)を用いて位置情報を検出する場合について説明する。
本実施形態における受光素子10の配置及び明暗格子パターン61の極数(刻線数)、及び円盤60の偏心などの構成は、図1に示される第1の実施形態におけるエンコーダ1と同様である。
図5は、本実施形態におけるエンコーダ1aの構成を示すブロック図である。
図5において、エンコーダ1aは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、及び信号処理部4aを備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、信号処理部4aの構成が、第1の実施形態におけるエンコーダ1と異なる点を除いて、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
図5において、エンコーダ1aは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、及び信号処理部4aを備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、信号処理部4aの構成が、第1の実施形態におけるエンコーダ1と異なる点を除いて、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
信号処理部4aは、切り替え制御部41、ドライバ部42、信号分離部43a、及び絶対位置検出部44を備えている。
信号分離部43aは、信号生成部30が生成した第2の混合信号に含まれるa1周期(a1=2)の信号情報とa2周期(a2=3)の信号情報とを分離する。信号分離部43aは、例えば、上述の第2の混合信号に基づいて、a1周期の処理信号(ここでは、2次高調波信号)における第1の位相情報(10θ)をa1周期の信号情報として生成する。また、信号分離部43aは、例えば、上述の第2の混合信号に基づいて、a2周期の処理信号(ここでは、3次高調波信号)における第2の位相情報(11θ)をa2周期の信号情報として生成する。また、信号分離部43aは、例えば、第2の混合信号とa1周期(a1=2)の基準信号とに基づいて第1の位相情報(10θ)を生成するとともに、第2の混合信号とa2周期(a2=3)の基準信号とに基づいて第2の位相情報(11θ)を生成する。
なお、本実施形態の第1の位相情報における位相情報θは、電気角のことであり、機械角10°(=360/36)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第1の位相情報は36θ変位する。第2の位相情報θは、電気角のことであり、機械角9°(=360/40)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第2の位相情報は40θ変位する。
なお、本実施形態の第1の位相情報における位相情報θは、電気角のことであり、機械角36°(=360/10)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第1の位相情報は10θ変位する。また、第2の位相情報における位相情報θは、電気角のことであり、機械角32.73°(=360/11)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第2の位相情報は11θ変位する。
また、信号分離部43aは、フィルタ部433と、位相検出部434とを備えている。
なお、本実施形態の第1の位相情報における位相情報θは、電気角のことであり、機械角36°(=360/10)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第1の位相情報は10θ変位する。また、第2の位相情報における位相情報θは、電気角のことであり、機械角32.73°(=360/11)を360°として内挿した情報である。すなわち、回転子6の1回転(360°変位)に対して、第2の位相情報は11θ変位する。
また、信号分離部43aは、フィルタ部433と、位相検出部434とを備えている。
フィルタ部433は、信号生成部30によって生成された第2の混合信号からa1周期(a1=2)の処理信号とa2周期(a2=3)の処理信号とを分離する。すなわち、フィルタ部433は、例えば、バンドパスフィルタ回路などを用いて、第2の混合信号から2次の正弦波を含む所定の周波数帯域を通過させて、2次の正弦波信号(2次高調波信号)を分離する。また、フィルタ部433は、例えば、バンドパスフィルタ回路などを用いて、第2の混合信号から3次の正弦波を含む所定の周波数帯域を通過させて、3次の正弦波信号(3次高調波信号)を分離する。すなわち、フィルタ部433は、受光素子11〜18を逐次出力させた検出信号(第2の混合信号)のうちの4次以上の高次成分を除去(低減)して、2次高調波信号の成分と3次高調波信号の成分とに分離して、位相検出部434に出力する。
位相検出部434は、フィルタ部433によって分離されたa1周期の処理信号(例、2次高調波信号)とa1周期の基準信号(2次高調波の基準信号)とに基づいて第1の位相情報を生成する(位相変調方式)。また、位相検出部434は、フィルタ部433によって分離されたa2周期の処理信号(例、3次高調波信号)とa2周期の基準信号(3次高調波の基準信号)とに基づいて第2の位相情報を生成する。ここで、位相検出部434は、フィルタ部433によって分離された2次高調波信号に基づいて、例えば、同期検波、位相同期、又は0クロス点位置計測の手法を用いて、基準信号(同期信号)に対する位相値を第1の位相情報(10θ)として検出する。また、位相検出部434は、フィルタ部433によって分離された3次高調波信号に基づいて、例えば、同期検波、位相同期、又は0クロス点位置計測の手法を用いて、基準信号(同期信号)に対する位相値を第2の位相情報(11θ)として検出する。
次に、本実施形態におけるエンコーダ1aの動作について説明する。
本実施形態における信号生成部30の動作は、上述した第1の実施形態と同様である。信号生成部30は、上述した第1の混合信号を出力する8個の受光素子11〜18を逐次出力させて上述した第2の混合信号を生成する。
本実施形態における信号生成部30の動作は、上述した第1の実施形態と同様である。信号生成部30は、上述した第1の混合信号を出力する8個の受光素子11〜18を逐次出力させて上述した第2の混合信号を生成する。
また、信号分離部43aは、上述したように、信号生成部30によって生成された第2の混合信号と処理信号の基準信号(同期信号)とに基づいて、例えば、同期検波、位相同期、又は0クロス点位置計測の手法(位相変調方式)を用いて、第1の位相情報(10θ)及び第2の位相情報(11θ)を検出する。
絶対位置検出部44は、第1の実施形態と同様に上述した式(11)を用いて、信号分離部43aが分離(生成)した第1の位相情報(10θ)と第2の位相情報(11θ)との差分により、回転子6の360°の範囲における絶対位置情報(θ)を検出する。
なお、本実施形態におけるエンコーダ1aの歪成分の低減については、2次高調波信号及び2次高調波信号をフィルタ部433により分離して処理するので、第1の実施形態と同様に、高調波の歪の影響を低減することができる。
なお、本実施形態におけるエンコーダ1aの歪成分の低減については、2次高調波信号及び2次高調波信号をフィルタ部433により分離して処理するので、第1の実施形態と同様に、高調波の歪の影響を低減することができる。
以上、説明したように、本実施形態におけるエンコーダ1aは、信号分離部43aが、第2の混合信号とa1周期(例、2周期)の基準信号とに基づいて第1の位相情報(例、10θ)を生成するとともに、第2の混合信号とa2周期(例、3周期)の基準信号とに基づいて第2の位相情報(例、11θ)を生成する。また、信号分離部43aは、第2の混合信号からa1周期(例、2周期)の処理信号とa2周期(例、3周期)の処理信号とを分離するフィルタ部433を備えている。そして、信号分離部43a(位相検出部434)は、フィルタ部433によって分離されたa1周期の処理信号とa1周期の基準信号とに基づいて第1の位相情報を生成するとともに、フィルタ部433によって分離されたa2周期の処理信号とa2周期の基準信号とに基づいて第2の位相情報を生成する。
これにより、本実施形態におけるエンコーダ1aは、第1の実施形態における逆フーリエ変換方式の場合と同様に、簡易な構成により、正確に位置情報を検出することができる。よって、本実施形態におけるエンコーダ1aは、高精度に位置情報を検出することができる。
これにより、本実施形態におけるエンコーダ1aは、第1の実施形態における逆フーリエ変換方式の場合と同様に、簡易な構成により、正確に位置情報を検出することができる。よって、本実施形態におけるエンコーダ1aは、高精度に位置情報を検出することができる。
次に、第3の実施形態について、図面を参照して説明する。
[第3の実施形態]
第3の実施形態では、エンコーダ1bが、受光素子10の位置ずれが生じている場合に補正処理を行う補正部45を備える場合の一例について説明する。
[第3の実施形態]
第3の実施形態では、エンコーダ1bが、受光素子10の位置ずれが生じている場合に補正処理を行う補正部45を備える場合の一例について説明する。
本実施形態における受光素子10の配置及び明暗格子パターン61の極数(刻線数)、及び円盤60の偏心などの構成は、図1に示される第1の実施形態におけるエンコーダ1と同様である。
図6は、本実施形態におけるエンコーダ1bの構成を示すブロック図である。
図6において、エンコーダ1bは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、及び信号処理部4bを備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、信号処理部4bの構成が、第1の実施形態におけるエンコーダ1と異なる点を除いて、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
図6において、エンコーダ1bは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、及び信号処理部4bを備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、信号処理部4bの構成が、第1の実施形態におけるエンコーダ1と異なる点を除いて、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
信号処理部4bは、切り替え制御部41、ドライバ部42、信号分離部43b、絶対位置検出部44、及び補正情報記憶部451を備えている。また、信号分離部43bは、フーリエ係数生成部431a、及び位相情報生成部432aを備えている。なお、本実施形態においてフーリエ係数生成部431a及び補正情報記憶部451が補正部45に対応する。
補正情報記憶部451(記憶部)は、後述する本実施形態における補正処理に用いる補正情報を記憶する。補正情報記憶部451が記憶する補正情報には、例えば、上述したa1周期(例、2周期)又はa2周期(例、3周期)を等分割したN個の位相信号(ただしN=n)の位相値情報(例、0°、π/4、・・・、7π/4)と、N個の位相信号を基準信号として、N個の位相信号(例、出力PD1〜PD8)とn個(例、8個)の受光素子11〜18の出力信号とのそれぞれの位相差とが含まれる。ここで、位相信号と受光素子10の出力信号との位相差は、製造の際に発生する受光素子10の位置ずれなどによって生じる。
ところで、本実施形態では、8個の受光素子11〜18を回転子6の1回転の範囲に均等に配置しているが、現実には、製造ばらつきなどにより、例えば、8個の受光素子11〜18の配置にばらつき(位置ずれ)が生じる場合がある。この配置のばらつき(位置ずれ)は、上述の位相差として、受光素子10の出力信号に検出することができる。ここで、位相信号と受光素子10の出力信号との位相差は、例えば、製造検査(出荷検査)の際に、予め取得している情報である。
補正部45は、1周期(例、2周期)又はa2周期(例、3周期)を等分割したN個(例、8個)の位相信号(ただしN=n)を基準信号として、8個の位相信号と8個の出力信号(出力PD1〜PD8)とのそれぞれの位相差と、8個の出力信号と、に基づいて、8個の出力信号が8個の位相信号になるように8個の出力信号をそれぞれ補正するとともに、補正された出力情報を生成する。補正部45は、所定の基準信号である8個の位相信号に対する8個の出力信号の位相差を、例えば、補正情報記憶部451から取得する。また、補正部45は、フーリエ係数生成部431aを備えている。
フーリエ係数生成部431aは、例えば、8個の出力信号と、補正情報記憶部451から読み出した8個の出力信号のそれぞれに対応する位相信号の位相値及び位相差とに基づいて、a1周期に対応する第1の次数(例えば、2次)のフーリエ係数(a2、b2)を補正された出力情報として生成する。また、フーリエ係数生成部431aは、例えば、8個の出力信号と、補正情報記憶部451から読み出した8個の出力信号のそれぞれに対応する位相信号の位相値及び位相差とに基づいて、a2周期に対応する第2の次数(例えば、3次)のフーリエ係数(a3、b3)を補正された出力情報として生成する。
ここで生成されるフーリエ係数は、8個の出力信号が8個の位相信号になるように、補正されたフーリエ係数であり、フーリエ係数生成部431aは、この補正されたフーリエ係数を補正された出力情報として生成する。フーリエ係数生成部431aは、生成したフーリエ係数を位相情報生成部432aに出力する。
ここで生成されるフーリエ係数は、8個の出力信号が8個の位相信号になるように、補正されたフーリエ係数であり、フーリエ係数生成部431aは、この補正されたフーリエ係数を補正された出力情報として生成する。フーリエ係数生成部431aは、生成したフーリエ係数を位相情報生成部432aに出力する。
位相情報生成部432aは、フーリエ係数生成部431aが生成したフーリエ係数(a2、b2)に基づいて第1の位相情報を生成する。なお、ここで、フーリエ係数(a2、b2)は、上述した補正された出力情報である。位相情報生成部432aは、補正されたフーリエ係数(a2、b2)に基づいて、第1の位相情報を生成する。
また、位相情報生成部432aは、フーリエ係数生成部431aが生成したフーリエ係数(a3、b3)に基づいて第2の位相情報を生成する。なお、ここで、フーリエ係数(a3、b3)は、上述した補正された出力情報である。位相情報生成部432aは、補正されたフーリエ係数(a3、b3)に基づいて、第2の位相情報を生成する。
このように、信号分離部43bは、補正部45によって生成された補正された出力情報(例えば、フーリエ係数(a2、b2)及び(a3、b3))に基づいて、第1の位相情報及び第2の位相情報を生成する。
また、位相情報生成部432aは、フーリエ係数生成部431aが生成したフーリエ係数(a3、b3)に基づいて第2の位相情報を生成する。なお、ここで、フーリエ係数(a3、b3)は、上述した補正された出力情報である。位相情報生成部432aは、補正されたフーリエ係数(a3、b3)に基づいて、第2の位相情報を生成する。
このように、信号分離部43bは、補正部45によって生成された補正された出力情報(例えば、フーリエ係数(a2、b2)及び(a3、b3))に基づいて、第1の位相情報及び第2の位相情報を生成する。
次に、本実施形態におけるエンコーダ1bの動作について説明する。
本実施形態における信号生成部30の動作は、上述した第1の実施形態と同様である。信号生成部30は、8個の受光素子11〜18を逐次出力させて上述した第2の混合信号を生成する。
本実施形態における信号生成部30の動作は、上述した第1の実施形態と同様である。信号生成部30は、8個の受光素子11〜18を逐次出力させて上述した第2の混合信号を生成する。
次に、本実施形態におけるエンコーダ1bにおける受光素子10の位置ずれが生じている場合の補正処理について説明する。なお、ここでは、一例として、受光素子12の位置が、δずれている場合について説明する。
この場合に、8個の受光素子11〜18の出力PD1〜PD8は、下記の式(12)により示される。ここで、受光素子12の出力PD2は、δずれた位相信号として出力される。
補正部45(信号分離部43b)のフーリエ係数生成部431aは、所定の基準信号である8個の位相信号に対する8個の出力信号の位相差を、例えば、補正情報記憶部451から取得する。ここで、補正情報記憶部451には、上述した受光素子12の位相値(2π/4)及び位相差(δ)が予め記憶されている。フーリエ係数生成部431aは、A/D変換部3から取得した8個の出力信号(PD1〜PD8)と、補正情報記憶部451から読み出した位相信号の位相値及び位相差とに基づいて、2次のフーリエ係数(a2、b2)を、下記の式(13)及び式(14)に基づいて生成する。
まず、フーリエ係数生成部431aは、フーリエ係数a2を下記の式(13)に基づいて生成する。ここで、位相信号の位相値α、位相差δとした場合に、フーリエ係数生成部431aは、フーリエ係数a2を算出する際の定数をcos(α)からcos(α−δ)に変更して、フーリエ係数a2を算出する。この場合、例えば、位相値αが「2π/4」であるので、フーリエ係数生成部431aは、式(13)に示すように、受光素子12の出力信号PD2に対応する定数をcos(2π/4)の代わりに、cos(2π/4−δ)を用いて、フーリエ係数a2を生成する。
また、フーリエ係数生成部431aは、フーリエ係数b2を下記の式(14)に基づいて生成する。ここで、フーリエ係数生成部431aは、フーリエ係数b2を算出する際の定数をsin(α)からsin(α−δ)に変更して、フーリエ係数b2を算出する。この場合、例えば、位相値αが「2π/4」であるので、フーリエ係数生成部431aは、式(14)に示すように、受光素子12の出力信号PD2に対応する定数をsin(2π/4)の代わりに、sin(2π/4−δ)を用いて、フーリエ係数b2を生成する。
このように、フーリエ係数生成部431aは、フーリエ係数(a2、b2)を算出する際に定数を補正することにより、8個の出力信号が8個の位相信号になるように補正し、フーリエ係数(a2、b2)を補正された出力情報として位相情報生成部432aに出力する。すなわち、補正部45は、位相信号の位相値αと位相差δとの差分値に基づいて、フーリエ係数(a2、b2)を生成する。
また、フーリエ係数生成部431aは、同様に、3次のフーリエ係数(a3、b3)を算出する際に定数を補正することにより、8個の出力信号が8個の位相信号になるように補正し、フーリエ係数(a3、b3)を補正された出力情報として位相情報生成部432aに出力する。
位相情報生成部432aは、補正されたフーリエ係数(a2、b2)に基づいて、下記の式(15)によって、第1の位相情報(10θ)を生成する。
また、位相情報生成部432aは、補正されたフーリエ係数(a3、b3)に基づいて、同様に、第2の位相情報(11θ)を生成する。
位相情報生成部432aは、生成した第1の位相情報(10θ)及び第2の位相情報(11θ)を絶対位置検出部44に出力する。なお、絶対位置検出部44における動作は、第1の実施形態と同様であるので、ここでは説明を省略する。
位相情報生成部432aは、生成した第1の位相情報(10θ)及び第2の位相情報(11θ)を絶対位置検出部44に出力する。なお、絶対位置検出部44における動作は、第1の実施形態と同様であるので、ここでは説明を省略する。
図7は、本実施形態におけるエンコーダ1bによる補正結果の一例を示す図である。
図7において、横軸は、回転子6の絶対位置情報(θ)を示し、縦軸は、誤差量を示している。
また、波形W10は、例えば、受光素子12の位置に1°(位相差δ=1°)のずれが生じている場合において、上述した補正部45を備えない場合の誤差特性を示している。また、波形W11は、同様に、受光素子12の位置の1°のずれが生じている場合において、補正部45を備える本実施形態におけるエンコーダ1bの誤差特性を示している。
図7の波形W10に示すように、補正部45を備えないこの一例の場合には、誤差量は約±0.25°である。これに対して、本実施形態におけるエンコーダ1bにおける誤差量は、約±0.0028°(波形W11参照)であり、本実施形態における補正部45を備えない場合に比べて誤差が約1/100に低減される。このように、本実施形態におけるエンコーダ1bは、例えば、受光素子10の位置ずれなどが生じた場合に、位置情報の誤差を低減することができる。
図7において、横軸は、回転子6の絶対位置情報(θ)を示し、縦軸は、誤差量を示している。
また、波形W10は、例えば、受光素子12の位置に1°(位相差δ=1°)のずれが生じている場合において、上述した補正部45を備えない場合の誤差特性を示している。また、波形W11は、同様に、受光素子12の位置の1°のずれが生じている場合において、補正部45を備える本実施形態におけるエンコーダ1bの誤差特性を示している。
図7の波形W10に示すように、補正部45を備えないこの一例の場合には、誤差量は約±0.25°である。これに対して、本実施形態におけるエンコーダ1bにおける誤差量は、約±0.0028°(波形W11参照)であり、本実施形態における補正部45を備えない場合に比べて誤差が約1/100に低減される。このように、本実施形態におけるエンコーダ1bは、例えば、受光素子10の位置ずれなどが生じた場合に、位置情報の誤差を低減することができる。
以上、説明したように、本実施形態におけるエンコーダ1bは、補正部45を備えている。補正部45は、a1周期(例、2周期)又はa2周期(例、3周期)を等分割したN個の位相信号(ただしN=n、例、n=8)を基準信号として、N個の位相信号とn個の出力信号とのそれぞれの位相差(α)と、n個の出力信号と、に基づいて、n個の出力信号がN個の位相信号になるようにn個の出力信号をそれぞれ補正する。また、補正部45は、n個の出力信号をそれぞれ補正するとともに、補正された出力情報(例、フーリエ係数(a2、b2)及び(a3、b3))を生成する。信号分離部43bは、補正部45によって生成された補正された出力情報に基づいて、第1の位相情報及び第2の位相情報を生成する。
これにより、例えば、受光素子10の位置ずれなどが生じた場合であっても、補正部45がn個の出力信号がN個の位相信号になるようにn個の出力信号をそれぞれ補正するので、本実施形態におけるエンコーダ1bは、高精度に位置情報を検出することができる。
これにより、例えば、受光素子10の位置ずれなどが生じた場合であっても、補正部45がn個の出力信号がN個の位相信号になるようにn個の出力信号をそれぞれ補正するので、本実施形態におけるエンコーダ1bは、高精度に位置情報を検出することができる。
また、本実施形態では、補正部45(フーリエ係数生成部431a)は、位相信号の位相値αと位相差δとの差分値(α−δ)に基づいて、フーリエ係数を生成する。すなわち、補正部45は、例えば、式(13)及び式(14)により、定数をcos(α−δ)及びsin(α−δ)に変換して、フーリエ係数を生成する。
これにより、本実施形態におけるエンコーダ1bは、受光素子10の位置すれなどによる位相信号のずれに基づく誤差を、簡易な手段により、補正することができる。よって、本実施形態におけるエンコーダ1bは、簡易な手段により、高精度に位置情報を検出することができる。
これにより、本実施形態におけるエンコーダ1bは、受光素子10の位置すれなどによる位相信号のずれに基づく誤差を、簡易な手段により、補正することができる。よって、本実施形態におけるエンコーダ1bは、簡易な手段により、高精度に位置情報を検出することができる。
次に、第4の実施形態について、図面を参照して説明する。
[第4の実施形態]
本実施形態における受光素子10の配置及び明暗格子パターン61の極数(刻線数)、及び円盤60の偏心などの構成は、図1に示される第1の実施形態におけるエンコーダ1と同様である。
[第4の実施形態]
本実施形態における受光素子10の配置及び明暗格子パターン61の極数(刻線数)、及び円盤60の偏心などの構成は、図1に示される第1の実施形態におけるエンコーダ1と同様である。
図8は、本実施形態におけるエンコーダ1cの構成を示すブロック図である。
図8において、エンコーダ1cは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、信号処理部4、及びゲイン調整部50を備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、ゲイン調整部50を備える点が、第1の実施形態におけるエンコーダ1と異なり、その他の構成は、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
図8において、エンコーダ1cは、光センサ部20、光源部21、スイッチ部2、A/D変換部3、信号処理部4、及びゲイン調整部50を備えている。ここで、光センサ部20は、8個の受光素子11〜18を有している。本実施形態では、ゲイン調整部50を備える点が、第1の実施形態におけるエンコーダ1と異なり、その他の構成は、第1の実施形態と同様である。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
ゲイン調整部50(調整部)は、例えば、ゲイン(利得)調整型の増幅回路(アンプ)であり、8個の受光素子11〜18から出力される8個の出力信号の信号レベルを調整する。ゲイン調整部50は、例えば、8個の出力信号の出力特性を一致させるように、8個の出力信号を調整する。ここで、出力信号の出力特性とは、例えば、出力信号の振幅、最大信号レベル、最小信号レベル、直流オフセット値などのことである。ゲイン調整部50は、調整した8個の出力信号をスイッチ部2に出力する。
なお、本実施形態において、スイッチ部2以降の動作は、上述した第1の実施形態と同様であり、ここでは説明を省略する。
なお、本実施形態において、スイッチ部2以降の動作は、上述した第1の実施形態と同様であり、ここでは説明を省略する。
以上、説明したように、本実施形態におけるエンコーダ1cは、n個(例、n=8)の受光素子10から出力されるn個の出力信号の信号レベルを調整するゲイン調整部50を備えている。
これにより、受光素子10の出力レベルのばらつきを低減することができる。そのため、本実施形態におけるエンコーダ1cは、第1の実施形態よりも誤差を低減することができる。よって、本実施形態におけるエンコーダ1cは、高精度に位置情報を検出することができる。
これにより、受光素子10の出力レベルのばらつきを低減することができる。そのため、本実施形態におけるエンコーダ1cは、第1の実施形態よりも誤差を低減することができる。よって、本実施形態におけるエンコーダ1cは、高精度に位置情報を検出することができる。
次に、第5の実施形態について、図面を参照して説明する。
[第5の実施形態]
本実施形態では、円盤60の偏心とは異なる別の手段により、第2の周期信号が得られるように、受光素子10の検出信号を変調させる場合の一例について説明する。ここでは、一例として、円盤60は、明暗格子パターン61aの透過領域の面積を回転位置に応じて変更して形成することにより、第2の周期信号が得られるように、受光素子10の検出信号を変調させる場合について説明する。
[第5の実施形態]
本実施形態では、円盤60の偏心とは異なる別の手段により、第2の周期信号が得られるように、受光素子10の検出信号を変調させる場合の一例について説明する。ここでは、一例として、円盤60は、明暗格子パターン61aの透過領域の面積を回転位置に応じて変更して形成することにより、第2の周期信号が得られるように、受光素子10の検出信号を変調させる場合について説明する。
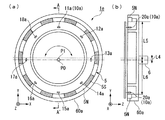
図9は、第5の実施形態によるエンコーダ1dの構成の一例を示す概略構成図である。
ここで、図9(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1dの正面図を示し、図9(b)は、A−A’線におけるエンコーダ1dの断面図を示している。
ここで、図9(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1dの正面図を示し、図9(b)は、A−A’線におけるエンコーダ1dの断面図を示している。
図9において、エンコーダ1dは、円盤60を有する回転子6、光センサ部20、光源部21、及び光センサ部20やその他の制御部品を搭載した基板7を備えている。この図において、図1と同一の構成については同一の符号を付し、その説明を省略する。
ここでは、エンコーダ1dは、透過型の光学式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1dは、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
ここでは、エンコーダ1dは、透過型の光学式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1dは、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
本実施形態における円盤60(符号板)は、回転子6の位置情報に応じて周期信号(第1の周期信号)が得られる明暗格子パターン61aを有している。円盤60は、明暗格子パターン61aによって第1の周期信号のm1周期(例、m1=20)が得られる回転子6の所定の変位範囲(ここでは、1回転=360°の範囲)において、m1周期(例、20周期)とは異なるm2周期(ただしm2は1以上の整数、例、m2=1)の周期信号(第2の周期信号)が得られるように構成されている。円盤60は、1周期(m2=1)の第2の周期信号が得られるように、例えば、明暗格子(刻線)の長さ(法線方向の幅)を回転位置に応じて変更して形成している明暗格子パターン61aを備えている。本実施形態における円盤60は、円盤60の1回転(=360°)で20極の明暗格子が配置されており、例えば、ネコ目構成と呼ばれるような1次の強度変調を刻線長に持たせたものである。このように、円盤60は、受光素子10が検出する信号を、例えば、強度変調させることによって第2の周期信号が得られるように構成されている。すなわち、円盤60は、刻線長(法線方向のパターン幅)を変更して形成されている明暗格子パターン61aに基づいて、第2の周期信号が得られるように受光素子10(光センサ部20)が検出する信号を変調させる。
明暗格子パターン61a(パターン)は、回転子6の1回転に20個(20極)の明暗格子(刻線)を備えている。すなわち、明暗格子パターン61aは、回転子6の360°の範囲(所定の変位範囲)に対して、20個の明暗格子を備えている。明暗格子パターン61aは、例えば、回転子6の360°の範囲でm1周期(ここでは、m1=20周期)の周期信号(第1の周期信号)が得られるように、円盤60の同心円上に形成されている。すなわち、明暗格子パターン61aは周期的なパターンである。
また、明暗格子パターン61aは、第2の周期信号が得られるように、例えば、回転子6の変位方向(円周方向)とは異なる方向(法線方向)のパターン幅を変更して形成されている。ここで、このパターン幅を変更して形成されている明暗格子パターン61aは、第2の周期信号が得られるように受光素子10が検出する信号を、例えば、強度変調させる変調部に対応する。
また、明暗格子パターン61aは、第2の周期信号が得られるように、例えば、回転子6の変位方向(円周方向)とは異なる方向(法線方向)のパターン幅を変更して形成されている。ここで、このパターン幅を変更して形成されている明暗格子パターン61aは、第2の周期信号が得られるように受光素子10が検出する信号を、例えば、強度変調させる変調部に対応する。
なお、本実施形態における光センサ部20(センサ部)は、n個(例、n=9個)の受光素子11〜19を備える受光素子群である。
受光素子11〜19は、上述した明暗格子パターン61aを検出することにより、円盤60から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。すなわち、9個の受光素子11〜19は、明暗格子パターン61a、及び、上述したこのパターン幅の変更に基づいて、第1の混合信号を出力する。
例えば、上述した回転子6の360°の範囲(所定の変位範囲)を回転子6が変位した場合に、受光素子11〜19は、それぞれ20周期(m1=20)の周期信号と1周期(m2=1)の周期信号とが混合された混合信号(第1の混合信号)を出力する。ここで、m1周期は、(m1>n/2)の条件を満たす。
受光素子11〜19は、上述した明暗格子パターン61aを検出することにより、円盤60から得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。すなわち、9個の受光素子11〜19は、明暗格子パターン61a、及び、上述したこのパターン幅の変更に基づいて、第1の混合信号を出力する。
例えば、上述した回転子6の360°の範囲(所定の変位範囲)を回転子6が変位した場合に、受光素子11〜19は、それぞれ20周期(m1=20)の周期信号と1周期(m2=1)の周期信号とが混合された混合信号(第1の混合信号)を出力する。ここで、m1周期は、(m1>n/2)の条件を満たす。
また、受光素子11〜19は、例えば、上述した回転子6の360°の範囲(所定の変位範囲)において、均等に配置されている。すなわち、受光素子11〜19は、例えば、回転子6の360°の範囲において等間隔(40°間隔)に配置されている。ここで、受光素子11〜19は、例えば、回転子6の1周(1回転)の電気角0°、40°、80°、120°、160°、200°、240°、280°、及び320°の信号を取得できるように配置されている。また、受光素子10の円周方向のサイズは、例えば、明暗格子パターン61の1ピッチ分(明暗格子1ピッチ分)よりも小さく定められている。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、9個)の受光素子10は、回転子6の全変位範囲において均等に配置されている。
また、9個の受光素子11〜19は、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、9個)の受光素子10は、回転子6の全変位範囲において均等に配置されている。
また、9個の受光素子11〜19は、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
ここで、a1周期及びa2周期は、|a1|=(m1−k×n)及び|a2|=(m1−k×n±m2)の条件を満たす(ただし、kは1以上の整数)。
本実施形態では、例えば、a1周期は2周期(=(20−2×9))であり、a2周期は3周期(=(10−2×9+1))である(ここでは、k=2)。この場合、周期の数a2の値は、(a1±1)を満たすように、“3”に定められている。
これにより、信号生成部30は、離散フーリエ変換におけるエイリアシングを利用することにより、20周期(m1=20)の周期信号と1周期(m2=1)の周期信号とを含む第1の混合信号である9個(n=9)の出力信号により、第2の混合信号を生成する。
本実施形態では、例えば、a1周期は2周期(=(20−2×9))であり、a2周期は3周期(=(10−2×9+1))である(ここでは、k=2)。この場合、周期の数a2の値は、(a1±1)を満たすように、“3”に定められている。
これにより、信号生成部30は、離散フーリエ変換におけるエイリアシングを利用することにより、20周期(m1=20)の周期信号と1周期(m2=1)の周期信号とを含む第1の混合信号である9個(n=9)の出力信号により、第2の混合信号を生成する。
図10は、本実施形態における光センサ部20の出力信号を説明する図である。
この図10における光センサ部20の出力信号は、20周期の周期信号(第1の周期信号)と、上述したパターン幅(刻線長)の変更により信号強度を変調させた1周期の周期信号(第2の周期信号)を混合した混合信号(第1の混合信号)となる。ここで、波形W12は、例えば、回転子6を360°回転させた場合における1個の受光素子10(例、受光素子11)の出力波形を示している。
この図10における光センサ部20の出力信号は、20周期の周期信号(第1の周期信号)と、上述したパターン幅(刻線長)の変更により信号強度を変調させた1周期の周期信号(第2の周期信号)を混合した混合信号(第1の混合信号)となる。ここで、波形W12は、例えば、回転子6を360°回転させた場合における1個の受光素子10(例、受光素子11)の出力波形を示している。
また、出力PD1〜PD9は、回転子6が静止している場合における受光素子11〜19に対応する出力信号を示している。この9個の出力PD1〜PD9は、離散フーリエ変換におけるエイリアシングによって、波形W13に示すようなa1周期(a1=2)とa2周期(a2=3)とを含む混合信号(第2の混合信号)として検出される。すなわち、この波形W13は、20周期の周期信号と1周期の周期信号との混合信号を9個の受光素子10により検出したものであるが、結果として離散フーリエ変換におけるエイリアシングが発生するため、あたかもa1周期(a1=2)とa2周期(a2=3)とを含む混合信号(第2の混合信号)を観測したようにみえる。
ここで、本実施形態における受光素子10の出力信号(出力PD)は、下記の式(16)によって示される。
式(16)において、第2項及び第3項が基本波(1次)成分に対応し、第4項が2次成分(2次高調波成分)に対応し、第5項が3次成分(3次高調波成分)に対応する。
ここで、第2項の(cos(θ))は基本波情報であるが、第3項の(1/2・sin(19θ))は、9個の受光素子10による検出によりエイリアシングが発生するため、同様に基本波情報となる。また、第4項の(sin(20θ))及び第5項の(1/2・sin(21θ))は、第3項と同様にエイリアシングが発生するため、2次成分情報及び3次成分情報が得られることになる。この場合、格子情報である明暗格子パターン61aは、20極の明暗格子であるが、明暗格子パターン61aのパターン幅を変更することにより、式(16)に示すように、あたかも21極の明暗格子であるような出力信号を得ることができる。
ここで、第2項の(cos(θ))は基本波情報であるが、第3項の(1/2・sin(19θ))は、9個の受光素子10による検出によりエイリアシングが発生するため、同様に基本波情報となる。また、第4項の(sin(20θ))及び第5項の(1/2・sin(21θ))は、第3項と同様にエイリアシングが発生するため、2次成分情報及び3次成分情報が得られることになる。この場合、格子情報である明暗格子パターン61aは、20極の明暗格子であるが、明暗格子パターン61aのパターン幅を変更することにより、式(16)に示すように、あたかも21極の明暗格子であるような出力信号を得ることができる。
また、エンコーダ1dにおける第2の混合信号の生成以降の動作は、第1の実施形態と同様であり、ここでは説明を省略する。ただし、本実施形態では、信号分離部43は、第1の位相情報(20θ)と第2の位相情報(21θ)を生成する。
以上、説明したように、本実施形態におけるエンコーダ1dは、明暗格子パターン61aが、第2の周期信号が得られるように回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)のパターン幅を変更して形成されている。そして、円盤60は、このパターン幅を変更して形成されている明暗格子パターン61aに基づいて、第2の周期信号が得られるように変調させる。すなわち、円盤60は、例えば、第2の周期信号が得られるように、受光素子10が検出する信号を強度変調させる変調部(パターン幅を変更して形成されている明暗格子パターン61a)を備えている。
これにより、円盤60は、明暗格子の極数とは異なる手段により受光素子10が検出する信号を変調させることによって第2の周期信号を得ることができる。そのため、本実施形態におけるエンコーダ1dは、1つの明暗格子パターン61aにより第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1dは、明暗格子パターン61aを1つ(1トラック)にすることができる。
また、本実施形態におけるエンコーダ1dは、簡易な構成により、第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1dは、簡易な構成により、高精度に位置情報を検出することができる。
また、本実施形態におけるエンコーダ1dは、簡易な構成により、第1の混合信号を生成することができる。よって、本実施形態におけるエンコーダ1dは、簡易な構成により、高精度に位置情報を検出することができる。
次に、第6の実施形態について、図面を参照して説明する。
[第6の実施形態]
本実施形態では、一例として、磁気式ロータリエンコーダの場合について説明する。
[第6の実施形態]
本実施形態では、一例として、磁気式ロータリエンコーダの場合について説明する。
図11は、第6の実施形態によるエンコーダ1eの構成の一例を示す概略構成図である。
ここで、図11(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1eの正面図を示し、図11(b)は、A−A’線におけるエンコーダ1eの断面図を示している。
ここで、図11(a)は、回転子6の回転軸方向(Z軸方向)から見たエンコーダ1eの正面図を示し、図11(b)は、A−A’線におけるエンコーダ1eの断面図を示している。
図11において、エンコーダ1eは、円盤60aを有する回転子6、磁気センサ部20a、及び磁気センサ部20aやその他の制御部品を搭載した基板7を備えている。
ここでは、エンコーダ1eは、磁気式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1eは、第1の実施形態と同様に、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
ここでは、エンコーダ1eは、磁気式ロータリエンコーダである場合の一例を示している。また、本実施形態では、エンコーダ1eは、第1の実施形態と同様に、機械角360°の絶対位置情報を検出するバーニア方式のロータリエンコーダである。
円盤60a(符号板)は、回転子6の位置情報に応じて周期信号(第1の周期信号)が得られる磁石5を有している。円盤60aは、磁石5によって第1の周期信号のm1周期(ただしm1は2以上の整数、例、m1=10)が得られる回転子6の所定の変位範囲(ここでは、1回転=360°の範囲)において、m1周期(例、10周期)とは異なるm2周期(ただしm2は1以上の整数、例、m2=1)の周期信号(第2の周期信号)が得られるように構成されている。円盤60aは、第1の実施形態と同様に、1周期(m2=1)の第2の周期信号が得られるように、例えば、回転子6の回転中心P0と円盤60aの回転中心P1とを、Y軸方向に距離L4の偏心量だけ予め偏心させて回転子6に接続されている。このように、円盤60aは、後述するホール素子10aが検出する信号を、例えば、強度変調させることによって第2の周期信号が得られるように構成されている。すなわち、円盤60aは、回転子6の回転中心P0に対して偏心させて配置されている磁石5(磁極パターン)に基づいて、第2の周期信号が得られるようにホール素子10a(磁気センサ部20a)が検出する信号を変調させる。
磁石5(パターン)は、例えば、永久磁石であって、多極磁石である。本実施形態では、一例として、磁石5は、磁極数が“10”の永久磁石である。ここで、「磁極数」とは、S(エス)極5SとN(エヌ)極5Nとの対の数を示す。すなわち、磁石5は、10対のS極5S及びN極5N(回転子6の1周に10極)を有する永久磁石である。また、磁石5は、円盤60aの同心円上(同一円周上)に配置(形成)されている。
また、磁石5は、円盤60aのドーナツ状の溝に接して配置されている。なお、磁石5は、例えば、ドーナツ状の溝に接して配置されている。
なお、磁石5は、円盤60aがY軸方向に距離L4だけ偏心しているため、Y軸方向の回転子6の回転中心P0からの距離L5及びL6が異なるように配置されている。例えば、磁石5は、第2の周期信号が得られるように、回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)に偏心させて配置されている。
また、磁石5は、円盤60aのドーナツ状の溝に接して配置されている。なお、磁石5は、例えば、ドーナツ状の溝に接して配置されている。
なお、磁石5は、円盤60aがY軸方向に距離L4だけ偏心しているため、Y軸方向の回転子6の回転中心P0からの距離L5及びL6が異なるように配置されている。例えば、磁石5は、第2の周期信号が得られるように、回転子6の変位方向(例、円周方向)とは異なる方向(例、法線方向)に偏心させて配置されている。
磁気センサ部20a(センサ部)は、n個(例、n=8個)のホール素子11a〜18aを備える検出素子群である。
ホール素子11a〜18aは、例えば、磁気検出素子である。ここで、ホール素子11a〜18aのうちの任意のホール素子、又は単にエンコーダ1eが備えるホール素子を示す場合には、ホール素子10a(検出素子)と称して以下説明する。
ホール素子11a〜18aは、例えば、磁気検出素子である。ここで、ホール素子11a〜18aのうちの任意のホール素子、又は単にエンコーダ1eが備えるホール素子を示す場合には、ホール素子10a(検出素子)と称して以下説明する。
ホール素子11a〜18aは、上述した磁石5を検出することにより、円盤60aから得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。すなわち、8個のホール素子11a〜18aは、磁石5、及び、上述した円盤60aの偏心に基づいて、第1の混合信号を出力する。
また、ホール素子11a〜18aは、例えば、上述した回転子6の360°の範囲(所定の変位範囲)において、均等に配置されている。すなわち、ホール素子11a〜18aは、例えば、回転子6の360°の範囲において等間隔(45°間隔)に配置されている。ここで、ホール素子11a〜18aは、例えば、回転子6の1周(1回転)の電気角0°、45°、90°、135°、180°、225°、270°、及び315°の信号を取得できるように配置されている。また、ホール素子11a〜18aの円周方向のサイズは、例えば、磁石5の磁極パターンの1ピッチ分よりも小さく設定されている。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、8個)のホール素子10aは、回転子6の全変位範囲において均等に配置されている。
また、8個のホール素子11a〜18aは、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
なお、本実施形態では、上述の回転子6の所定の変位範囲は、回転子6の全変位範囲(例、1回転=360°の範囲)である。したがって、n個(例、8個)のホール素子10aは、回転子6の全変位範囲において均等に配置されている。
また、8個のホール素子11a〜18aは、例えば、それぞれが同様の検出感度を有しており、それぞれが同様の出力レベルを有している。
図12は、本実施形態におけるエンコーダ1eの構成を示すブロック図である。
図12において、エンコーダ1eは、磁気センサ部20a、スイッチ部2、A/D変換部3、及び信号処理部4cを備えている。ここで、磁気センサ部20aは、8個のホール素子11a〜18aを有している。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
図12において、エンコーダ1eは、磁気センサ部20a、スイッチ部2、A/D変換部3、及び信号処理部4cを備えている。ここで、磁気センサ部20aは、8個のホール素子11a〜18aを有している。この図において、図2と同一の構成については同一の符号を付し、その説明を省略する。
本実施形態おけるエンコーダ1eは、8個の受光素子10の代わりに8個のホール素子10aを備え、光源部21及びドライバ部42を備えない点を除いて、第1の実施形態と同様の構成である。なお、信号処理部4cは、切り替え制御部41、信号分離部43、及び絶対位置検出部44を備えている。
また、本実施形態における動作は、第1の実施形態と同様であり、ここでは説明を省略する。
以上、説明したように、本実施形態におけるエンコーダ1eは、円盤60aが、回転子6の位置情報に応じて第1の周期信号が得られる磁石5を有する。円盤60aは、磁石5によって第1の周期信号のm1周期(例、10周期)が得られる回転子6の所定の変位範囲(例、1回転=360°の範囲)において、m1周期とは異なるm2周期(例、1周期)の第2の周期信号が得られるように構成されている。また、n個(例、8個)のホール素子10aは、回転子6の所定の変位範囲において、均等に配置されており、円盤60aから得られる第1の周期信号と第2の周期信号とを含む第1の混合信号を出力する。
信号生成部30は、n個の出力信号に基づいて、互いに周期の異なるa1周期(例、2周期)及びa2周期(例、3周期)が混合された第2の混合信号を生成する。信号分離部43は、信号生成部30が生成した第2の混合信号に含まれるa1周期の信号情報(例、2次高調波の位相情報(10θ))とa2周期の信号情報(例、3次高調波の位相情報(11θ))とを分離する。そして、絶対位置検出部44は、信号分離部43によって分離されたa1周期の信号情報及びa2周期の信号情報に基づいて、回転子6の位置情報を検出する。
これにより、本実施形態におけるエンコーダ1eは、第1の実施形態と同様の効果を奏し、高精度に位置情報を検出することができる。
信号生成部30は、n個の出力信号に基づいて、互いに周期の異なるa1周期(例、2周期)及びa2周期(例、3周期)が混合された第2の混合信号を生成する。信号分離部43は、信号生成部30が生成した第2の混合信号に含まれるa1周期の信号情報(例、2次高調波の位相情報(10θ))とa2周期の信号情報(例、3次高調波の位相情報(11θ))とを分離する。そして、絶対位置検出部44は、信号分離部43によって分離されたa1周期の信号情報及びa2周期の信号情報に基づいて、回転子6の位置情報を検出する。
これにより、本実施形態におけるエンコーダ1eは、第1の実施形態と同様の効果を奏し、高精度に位置情報を検出することができる。
[第7の実施形態]
次に、上述の実施形態におけるエンコーダ1(1a〜1e)を備える駆動装置(モータ装置、アクチュエータ)について説明する。
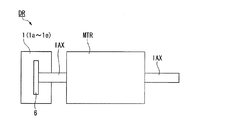
図13は、本実施形態における駆動装置DRの概略図である。本実施形態における駆動装置DRは、入力軸IAXを回転させるモータMTRと、入力軸IAX(回転子6)に設けられたエンコーダ1(1a〜1e)と、を備える。すなわち、駆動装置DRは、エンコーダ1(1a〜1e)と、入力軸IAX(被駆動体)を駆動するモータMTR(駆動部)と、を備えている。
次に、上述の実施形態におけるエンコーダ1(1a〜1e)を備える駆動装置(モータ装置、アクチュエータ)について説明する。
図13は、本実施形態における駆動装置DRの概略図である。本実施形態における駆動装置DRは、入力軸IAXを回転させるモータMTRと、入力軸IAX(回転子6)に設けられたエンコーダ1(1a〜1e)と、を備える。すなわち、駆動装置DRは、エンコーダ1(1a〜1e)と、入力軸IAX(被駆動体)を駆動するモータMTR(駆動部)と、を備えている。
エンコーダ1(1a〜1e)は、入力軸IAX(被駆動体)の回転位置(角度位置)を検出し、駆動装置DRを制御する上位のコントローラに対して回転位置を含む位置情報をエンコーダ信号として出力する。上位のコントローラは、エンコーダ1(1a〜1e)から受信したエンコーダ信号をもとに、駆動装置DRを制御する。本実施形態におけるエンコーダ1(1a〜1e)は回転位置を高精度に検出することができるため、本実施形態における駆動装置DRはモータMTRの入力軸IAXを高精度に位置制御することができる。また、本実施形態におけるエンコーダ1(1a〜1e)は、センサ部(光センサ部20又は磁気センサ部20a)を1系統に共有化することができるとともに、回転子6の位置情報に応じて周期信号が得られるパターン(明暗格子パターン61(61a)又は磁石5)を1つ(1トラック)にすることができる。よって、本実施形態における駆動装置DRは、小型化、軽量化を図ることができる。
なお、本実施形態における駆動装置DRは、図14に示すように、モータMTRの入力軸IAXに減速機RG(例、遊星歯車式機構)を設ける構成としてもよい。この場合、本実施形態におけるエンコーダ1(1a〜1e)は、その減速機RGの出力軸OAXに配置するようにしてもよいし、モータMTRの入力軸IAXと減速機RGの出力軸OAXとの両方に配置するようにしてもよい。
なお、本発明は、上記の各実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で変更可能である。
例えば、上記の第1〜第5の実施形態において、エンコーダ1(1a〜1d)は、透過型の光学式ロータリエンコーダである形態を説明したが、これに限定されるものではない。例えば、エンコーダ1(1a〜1d)は、反射型の光学式ロータリエンコーダであってもよいし、レンズなどを備える形態であってもよい。
例えば、上記の第1〜第5の実施形態において、エンコーダ1(1a〜1d)は、透過型の光学式ロータリエンコーダである形態を説明したが、これに限定されるものではない。例えば、エンコーダ1(1a〜1d)は、反射型の光学式ロータリエンコーダであってもよいし、レンズなどを備える形態であってもよい。
図15は、光学式ロータリエンコーダであるエンコーダ1(1a〜1d)の変形例を示す図である。
エンコーダ1(1a〜1d)は、例えば、図15(a)に示すように、透過型、且つ照明光を平行光にするレンズ22(例えば、コリメーターレンズなど)を備える形態であってもよい。
また、エンコーダ1(1a〜1d)は、例えば、図15(b)に示すように、反射型の光学式エンコーダであってもよいし、例えば、図15(c)に示すように、レンズ22を備えた反射型の光学式エンコーダであってもよい。また、エンコーダ1(1a〜1d)は、受光素子10に照射される照明光の光量を制限するスリットを備える形態であってもよい。
エンコーダ1(1a〜1d)は、例えば、図15(a)に示すように、透過型、且つ照明光を平行光にするレンズ22(例えば、コリメーターレンズなど)を備える形態であってもよい。
また、エンコーダ1(1a〜1d)は、例えば、図15(b)に示すように、反射型の光学式エンコーダであってもよいし、例えば、図15(c)に示すように、レンズ22を備えた反射型の光学式エンコーダであってもよい。また、エンコーダ1(1a〜1d)は、受光素子10に照射される照明光の光量を制限するスリットを備える形態であってもよい。
また、上述したm1周期、m2周期、受光素子10(ホール素子10a)の数n、a1周期、及びa2周期は、上記の各実施形態に限定されるものではない。例えば、(m1=k×n±2)とした場合に、受光素子10(ホール素子10a)の出力信号(出力PD)は、下記の式(17)によって示される。
式(17)において、第2項及び第3項が基本波(1次)成分に対応し、第4項が2次成分(2次高調波成分)に対応し、第5項が3次成分(3次高調波成分)に対応する。この場合、信号分離部43(43a、43b)は、2次成分情報及び3次成分情報により第1の位相情報及び第2の位相情報を生成することが可能である。
また、例えば、(m1=k×n±3)とした場合に、受光素子10(ホール素子10a)の出力信号(出力PD)は、下記の式(18)によって示される。
また、例えば、(m1=k×n±3)とした場合に、受光素子10(ホール素子10a)の出力信号(出力PD)は、下記の式(18)によって示される。
式(18)において、第2項が基本波(1次)成分に対応し、第3項が2次成分(2次高調波成分)に対応し、第4項が3次成分(3次高調波成分)に対応し、第5項が4次成分(4次高調波成分)に対応する。この場合、信号分離部43(43a、43b)は、1次成分情報及び2次成分情報、2次成分情報及び3次成分情報、3次成分情報及び4次成分情報のうちのいずれかの組み合わせにより第1の位相情報及び第2の位相情報を生成することが可能である。
この式(17)及び式(18)を一般化し、(m1=k×n±η)とした場合に、受光素子10(ホール素子10a)の出力信号(出力PD)は、下記の式(19)によって示される。ここで、m2周期が“1”である場合には、例えば、変数ηは、2以上の整数である。なお、変数ηが1以下である場合には、2つ以上の情報が混在するため、処理可能な次数信号を得ることができない。
この式(17)及び式(18)を一般化し、(m1=k×n±η)とした場合に、受光素子10(ホール素子10a)の出力信号(出力PD)は、下記の式(19)によって示される。ここで、m2周期が“1”である場合には、例えば、変数ηは、2以上の整数である。なお、変数ηが1以下である場合には、2つ以上の情報が混在するため、処理可能な次数信号を得ることができない。
この場合、信号分離部43(43a、43b)は、式(19)のうちの2つの次数の組み合わせにより第1の位相情報及び第2の位相情報を生成することが可能である。ただし、離散フーリエ変換のエイリアシングを利用するためには、a1周期及びa2周期に使用する最大の周期の数は、(n/2)より小さい必要がある。
また、上記の各実施形態、及び上述の式(17)〜式(19)の一例は、m2周期が“1”である場合を説明したが、m2を“2”以上にする形態であってもよい。この場合、上述の式(19)において、(cos(θ))を(cos(m2・θ))に、(η−1)を(η−m2)に、(η+1)を(η+m2)に、それぞれ置き換えることにより適用可能である。
また、上記の各実施形態、及び上述の式(17)〜式(19)の一例は、m2周期が“1”である場合を説明したが、m2を“2”以上にする形態であってもよい。この場合、上述の式(19)において、(cos(θ))を(cos(m2・θ))に、(η−1)を(η−m2)に、(η+1)を(η+m2)に、それぞれ置き換えることにより適用可能である。
また、上記の各実施形態は、単独で用いる形態を説明したが、上記の各実施形態を組み合わせて適用する形態であってもよい。例えば、上記の第4〜第6の実施形態において、第1の実施形態(逆フーリエ変換方式)に対して適用する形態を説明したが、第2の実施形態(位相変調方式)に対して適用する形態であってもよい。また、例えば、第3及び第5の実施形態を組み合わせて適用する形態でもよいし、第2〜第4の実施形態に第5又は第6の実施形態を適用する形態でもよい。
また、上記の第3の実施形態において、補正部45は、逆フーリエ変換方式において補正する形態を説明したが、第2の実施形態のような位相変調方式において補正を行うことも可能である。例えば、各受光素子10の出力(fn(θ))に対して、下記の式(20)、式(21)、式(22)のうちのいずれかにより補正された出力SHnを生成することにより、受光素子10の位置ずれが生じている場合に補正処理を行うことができる。
ここで、位相値(θ^)は、位相検出部434によって1つ前(最新)の位相情報として検出された位相値である。
なお、補正部45は、位相差δや要求される精度に応じて、上述の式(20)〜式(22)のうちの1つを選択して補正処理を実行してもよいし、上述の式(20)〜式(22)のうちの予め定められた1つの方式のみを補正処理を実行してもよい。
なお、補正部45は、位相差δや要求される精度に応じて、上述の式(20)〜式(22)のうちの1つを選択して補正処理を実行してもよいし、上述の式(20)〜式(22)のうちの予め定められた1つの方式のみを補正処理を実行してもよい。
また、上記の第2の実施形態において、信号分離部43aは、フィルタ部433を備える形態を説明したが、フィルタ部433を備えずに、直接、処理次数の信号(基準信号)で同期検波を実行して位相を求める形態であってもよいし、他の方式を用いて位相情報を検出する形態であってもよい。
また、上記の各実施形態では、検出素子として、受光素子10、又はホール素子10aを用いる形態を説明したが、例えば、他の磁気式、接触式、静電容量方式、電磁誘導方式などの検出素子を用いる形態でもよい。
また、上記の各実施形態では、360°(全周)を検出範囲として絶対位置情報を検出する形態を説明したが、エンコーダ1(1a〜1e)は、他の検出範囲(例えば、90°や180°など)における絶対位置情報を検出する形態であってもよい。
また、上記の各実施形態では、360°(全周)を検出範囲として絶対位置情報を検出する形態を説明したが、エンコーダ1(1a〜1e)は、他の検出範囲(例えば、90°や180°など)における絶対位置情報を検出する形態であってもよい。
また、上記の各実施形態において、円盤60(60a)の偏心又はパターン幅の変更により、第2の周期信号が得られるように検出信号を強度変調する形態を説明したが、これに限定されずに他の方式により強度変調する形態であってもよい。例えば、第6の実施形態において、磁石5の磁極パターンのZ軸方向の厚さを回転位置に応じて変更して形成する形態でもよい。
また、上記の第4の実施形態において、ゲイン調整部50を各受光素子10とスイッチ部2との間に備える形態を説明したが、これに限定されるものではない。例えば、ゲイン調整部50をスイッチ部2とA/D変換部3との間に備える形態でもよいし、A/D変換部3によりデジタル化した後で信号レベルを調整する形態でもよい。スイッチ部2以降の出力信号において、各受光素子10の信号レベルを調整した場合、シリアル(直列的)に処理することができるので、ゲイン調整部50の構成を縮小することができる。
また、信号レベルを調整する調整部の一例として、ゲイン調整型アンプを用いる形態を説明したが、光源部21の駆動電流(磁気式の場合にはホール素子10aの駆動電圧)を調整する形態でもよい。
また、信号レベルを調整する調整部の一例として、ゲイン調整型アンプを用いる形態を説明したが、光源部21の駆動電流(磁気式の場合にはホール素子10aの駆動電圧)を調整する形態でもよい。
また、上記の各実施形態において、切り替え制御部41は、一例として、受光素子10(ホール素子10a)の出力信号を例えば、時計回りの順に切り替える形態を説明したが、これに限定されるものではない。例えば、切り替え制御部41は、回転の影響を受け難い所定の順番によって、受光素子10(ホール素子10a)の出力信号を切り替える形態でもよい。
また、上記の各実施形態において、A/D変換部3をスイッチ部2の後段に備える形態を説明したが、スイッチ部2の前段において、各受光素子10(ホール素子10a)の個別のA/D変換部3を備える形態でもよい。
また、上記の各実施形態において、A/D変換部3をスイッチ部2の後段に備える形態を説明したが、スイッチ部2の前段において、各受光素子10(ホール素子10a)の個別のA/D変換部3を備える形態でもよい。
また、上記の各実施形態において、エンコーダ1(1a〜1e)は、ロータリエンコーダである場合について説明したが、リニアエンコーダに適用してもよい。
また、第7の実施形態において、駆動装置DRの一例として、ロータリ式のエンコーダ1(1a〜1e)を備え、回転子6を回転させるモータ装置の場合を説明したが、これに限定されるものではない。例えば、駆動装置DRは、上述したリニア式エンコーダを備え、スケールが接続されたステージを駆動するステージ装置であってもよいし、例えば、工作機械、精密機械、半導体のチップマウンタ、ステッパ装置などであってもよい。
また、第7の実施形態において、駆動装置DRの一例として、ロータリ式のエンコーダ1(1a〜1e)を備え、回転子6を回転させるモータ装置の場合を説明したが、これに限定されるものではない。例えば、駆動装置DRは、上述したリニア式エンコーダを備え、スケールが接続されたステージを駆動するステージ装置であってもよいし、例えば、工作機械、精密機械、半導体のチップマウンタ、ステッパ装置などであってもよい。
また、上記の各実施形態において、信号処理部4(4a〜4c)の各部は専用のハードウェアにより実現されるものであってもよく、また、メモリ及びCPUを備えて、プログラムによって実現されてもよい。
上述のエンコーダ1(1a〜1e)は内部に、コンピュータシステムを有している。そして、上述したエンコーダ1(1a〜1e)の処理過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしてもよい。
1,1a,1b,1c,1d,1e…エンコーダ、5…磁石、6…回転子、10,11,12,13,14,15,16,17,18,19…受光素子、10a,11a,12a,13a,14a,15a,16a,17a,18a…ホール素子、30…信号生成部、43,43a,43b…信号分離部、44…絶対位置検出部、45…補正部、50…ゲイン調整部、60,60a…円盤、61,61a…明暗格子パターン、DR…駆動装置、MTR…モータ
Claims (14)
- 被駆動体の位置情報に応じて第1の周期信号が得られるパターンを有し、前記パターンによって前記第1の周期信号のm1周期(ただしm1は2以上の整数)が得られる前記被駆動体の所定の変位範囲において、前記m1周期とは異なるm2周期(ただしm2は1以上の整数)の第2の周期信号が得られるように構成された符号板と、
前記符号板から得られる前記第1の周期信号と前記第2の周期信号とを含む第1の混合信号を出力するn個の検出素子であって、前記被駆動体の所定の変位範囲において、配置されているn個の検出素子と、
前記n個の出力信号に基づいて、互いに周期の異なるa1周期及びa2周期が混合された第2の混合信号を生成する信号生成部と、
前記信号生成部が生成した前記第2の混合信号に含まれる前記a1周期の信号情報と前記a2周期の信号情報とを分離する信号分離部と、
前記信号分離部によって分離された前記a1周期の信号情報及び前記a2周期の信号情報に基づいて、前記被駆動体の位置情報を検出する検出部と
を備えることを特徴とするエンコーダ。 - 前記符号板は、前記検出素子が検出する信号を変調させることによって前記第2の周期信号が得られるように構成されている
ことを特徴とする請求項1に記載のエンコーダ。 - 前記m1周期は、(m1>n/2)の条件を満たし、
前記a1周期及び前記a2周期は、|a1|=(m1−k×n)及び|a2|=(m1−k×n±m2)の条件を満たす(ただし、kは1以上の整数)
ことを特徴とする請求項1又は請求項2に記載のエンコーダ。 - 前記a1周期は、(n/2>|a1|>m2)の条件を満たす、又は、
前記a2周期は、(n/2>|a2|)の条件を満たす
ことを特徴とする請求項1から請求項3のいずれか一項に記載のエンコーダ。 - 前記パターンは、前記第2の周期信号が得られるように、前記被駆動体の変位方向とは異なる方向に偏心させて配置されており、
前記符号板は、
偏心させて配置されている前記パターンに基づいて、前記第2の周期信号が得られるように前記検出素子が検出する信号を変調させる
ことを特徴とする請求項1から請求項4のいずれか一項に記載のエンコーダ。 - 前記パターンは、前記第2の周期信号が得られるように、前記被駆動体の変位方向とは異なる方向のパターン幅を変更して形成されており、
前記符号板は、
前記パターン幅を変更して形成されている前記パターンに基づいて、前記第2の周期信号が得られるように前記検出素子が検出する信号を変調させる
ことを特徴とする請求項1から請求項4のいずれか一項に記載のエンコーダ。 - 前記被駆動体の所定の変位範囲は、前記被駆動体の全変位範囲であり、
前記n個の検出素子は、前記被駆動体の全変位範囲において均等に配置されている
ことを特徴とする請求項1から請求項6のいずれか一項に記載のエンコーダ。 - 前記a2の値は、(a1±1)になるように定められている
ことを特徴とする請求項1から請求項7のいずれか一項に記載のエンコーダ。 - 前記信号分離部は、
前記第2の混合信号に基づいて、前記a1周期の処理信号における第1の位相情報を前記a1周期の信号情報として生成するとともに、前記a2周期の処理信号における第2の位相情報を前記a2周期の信号情報として生成し、
前記検出部は、
前記信号分離部が生成した前記第1の位相情報及び第2の位相情報に基づいて、前記被駆動体の絶対位置を示す前記位置情報を検出する
ことを特徴とする請求項1から請求項8のいずれか一項に記載のエンコーダ。 - 前記信号分離部は、
前記第2の混合信号に基づいて、前記a1周期に対応する第1の次数のフーリエ係数及び前記a2周期に対応する第2の次数のフーリエ係数を生成し、生成した前記第1の次数のフーリエ係数に基づいて前記第1の位相情報を生成するとともに、生成した前記第2の次数のフーリエ係数に基づいて前記第2の位相情報を生成する
ことを特徴とする請求項9に記載のエンコーダ。 - 前記信号分離部は、
前記第2の混合信号と前記a1周期の基準信号とに基づいて前記第1の位相情報を生成するとともに、前記第2の混合信号と前記a2周期の基準信号とに基づいて前記第2の位相情報を生成する
ことを特徴とする請求項9に記載のエンコーダ。 - 前記a1周期又は前記a2周期を等分割したN個の位相信号(ただしN=n)を基準信号として、前記N個の位相信号と前記n個の出力信号とのそれぞれの位相差と、前記n個の出力信号と、に基づいて、前記n個の出力信号が前記N個の位相信号になるように前記n個の出力信号をそれぞれ補正する補正部を備える
ことを特徴とする請求項1から請求項11のいずれか一項に記載のエンコーダ。 - 前記n個の検出素子から出力される前記n個の出力信号の信号レベルを調整する調整部を備える
ことを特徴とする請求項1から請求項12のいずれか一項に記載のエンコーダ。 - 請求項1から請求項13のいずれか一項に記載のエンコーダと、
前記被駆動体を駆動する駆動部と、
を備えることを特徴とする駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012106720A JP2013234890A (ja) | 2012-05-08 | 2012-05-08 | エンコーダ、及び駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012106720A JP2013234890A (ja) | 2012-05-08 | 2012-05-08 | エンコーダ、及び駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013234890A true JP2013234890A (ja) | 2013-11-21 |
Family
ID=49761132
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012106720A Pending JP2013234890A (ja) | 2012-05-08 | 2012-05-08 | エンコーダ、及び駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013234890A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017068952A1 (ja) * | 2015-10-22 | 2017-04-27 | 三菱電機株式会社 | 角度検出装置 |
-
2012
- 2012-05-08 JP JP2012106720A patent/JP2013234890A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017068952A1 (ja) * | 2015-10-22 | 2017-04-27 | 三菱電機株式会社 | 角度検出装置 |
| JPWO2017068952A1 (ja) * | 2015-10-22 | 2018-01-11 | 三菱電機株式会社 | 角度検出装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5318212B2 (ja) | 光学エンコーダをインデックスする方法 | |
| EP2511666B1 (en) | Encoder | |
| JP2013228313A (ja) | エンコーダ、及び駆動装置 | |
| CN103674081B (zh) | 标尺、编码器、透镜装置以及图像拾取系统 | |
| US10540559B2 (en) | Position detection apparatus, lens apparatus, image pickup system, machine tool apparatus, position detection method, and non-transitory computer-readable storage medium which are capable of detecting abnormality | |
| US20110220780A1 (en) | Optical encoder | |
| US10215596B2 (en) | Position detection apparatus, lens apparatus, image pickup system, machine tool apparatus, exposure apparatus, position detection method, and non-transitory computer-readable storage medium which are capable of detecting reference position with high accuracy | |
| JP2013234890A (ja) | エンコーダ、及び駆動装置 | |
| US6326908B1 (en) | Precision position encoder using coarse position indicator | |
| JP2014010000A (ja) | 一体型センサ、及びパワーステアリング装置 | |
| JP2013205163A (ja) | エンコーダ、及び駆動装置 | |
| US9383230B2 (en) | Position detection apparatus, lens apparatus, image pickup system, machine tool apparatus, position detection method, and non-transitory computer-readable storage medium | |
| JP6440609B2 (ja) | 位置検出装置、レンズ装置、撮像システム、工作装置、露光装置、位置検出方法、プログラム、記憶媒体 | |
| JP2013228312A (ja) | エンコーダ、及び駆動装置 | |
| JP5480507B2 (ja) | レーザ干渉計 | |
| JPWO2007077855A1 (ja) | エンコーダ | |
| JP5449417B2 (ja) | 信号処理装置及び回転角度検出装置 | |
| US20110157578A1 (en) | Signal processing apparatus used for optical signal output device and optical displacement detection system | |
| JP2013101023A (ja) | 位置検出装置、及び駆動装置 | |
| JP2013040834A (ja) | エンコーダ装置、及び装置 | |
| JP5593731B2 (ja) | 磁気式エンコーダ | |
| JP2023019809A (ja) | アブソリュートロータリエンコーダ及びそれを備える装置 | |
| JP2008261786A (ja) | 絶対角検出装置 | |
| JP6373457B1 (ja) | エンコーダおよびこれを用いた撮像装置 | |
| JP2002286506A (ja) | 光学スケールを用いた寸法測定装置 |