JP2013500902A - パーキングスペースへの駐車支援方法及び駐車支援装置 - Google Patents
パーキングスペースへの駐車支援方法及び駐車支援装置 Download PDFInfo
- Publication number
- JP2013500902A JP2013500902A JP2012523325A JP2012523325A JP2013500902A JP 2013500902 A JP2013500902 A JP 2013500902A JP 2012523325 A JP2012523325 A JP 2012523325A JP 2012523325 A JP2012523325 A JP 2012523325A JP 2013500902 A JP2013500902 A JP 2013500902A
- Authority
- JP
- Japan
- Prior art keywords
- parking space
- parking
- vehicle
- section
- oblique
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/028—Guided parking by providing commands to the driver, e.g. acoustically or optically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
Description
縦列型駐車スペースとしてのパーキングスペースまたは斜め向き駐車スペースとしてのパーキングスペースを識別するステップと、
前記パーキング軌跡の第1区分に続く第2区分に沿って車両を誘導するステップとを含み、
前記中間点は、縦列型駐車スペース若しくは斜め向き駐車スペースとして構成されているパーキングスペースへの当該車両の後半の駐車が可能となるように決定されており、
前記パーキング軌跡の第2区分は、車両が縦列型駐車スペースの存在若しくは斜め向き駐車スペースの存在に依存して誘導されるように選択されている。
Claims (10)
- 駐車支援装置を用いたパーキングスペース(2)への車両(1)の駐車支援のための方法であって、
前記駐車支援装置は車両(1)を少なくとも1つのパーキング軌跡に沿って誘導しており、
前記方法は少なくとも、
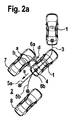
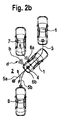
車両(1)をパーキング軌跡の第1区分(3)に沿って中間点(4)まで誘導するステップと、
縦列型駐車スペースとしてのパーキングスペース(2)または斜め向き駐車スペースとしてのパーキングスペース(2)を識別するステップと、
前記パーキング軌跡の第1区分(3)に続く第2区分(5a,5b)に沿って車両(1)を誘導するステップとを有しており、
前記中間点(4)は、縦列型駐車スペースとして又は斜め向き駐車スペースとして構成されているパーキングスペース(2)への当該車両(1)の後続の駐車が可能となるように決定されており、
前記パーキング軌跡の第2区分(5a,5b)は、当該車両(1)が縦列型駐車スペースの存在又は斜め向き駐車スペースの存在に依存して誘導されるように選択されるようにしたことを特徴とする方法。 - 前記車両(1)は少なくとも1つの検出手段(6a,6b)を有しており、該検出手段を用いて縦列型駐車スペースとしてのパーキングスペースの識別又は斜め向き駐車スペースとしてのパーキングスペースの識別が実施される、請求項1記載の方法。
- 前記パーキングスペース(2)は対象(7,8)によって区切られており、縦列型駐車スペースとしてのパーキングスペース(2)の識別または斜め向き駐車スペースとしてのパーキングスペース(2)の識別が、前記検出手段(6a,6b)を用いた前記対象(7,8)の少なくとも1つの検出によって実施される、請求項2記載の方法。
- 前記対象(7,8)の少なくとも1つは、別の車両(7,8)であり、該別の車両は、前記パーキングスペース(2)が縦列型駐車スペースである場合には走行路に対して平行に配向され、前記パーキングスペース(2)が斜め向き駐車スペースである場合には、走行路に対して斜めに配向されている、請求項1から3いずれか1項記載の方法。
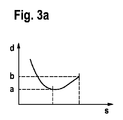
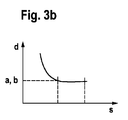
- 前記対象(7,8)の少なくとも1つと車両(1)との間の間隔(d)が検出手段(6a,6b)を用いて検出される、請求項2から4いずれか1項記載の方法。
- 当該車両(1)がパーキングスペース(2)に近づく際に走行する走行路に対して前記他の車両(7,8)が斜めに配向されている場合には、当該車両(1)が他の車両(7,8)に対して平行に配置された配向を有するように中間点(4)までのパーキング軌跡の第1区分(3)が決定される、請求項1から5いずれか1項記載の方法。
- 前記パーキングスペース(2)が斜め向き駐車スペースとして構成されている場合に、検出手段(6a,6b)によってパーキング軌跡の第2区分(5a)に亘って実質的に等しい間隔(d)が検出されると、前記第2区分(5a)は実質的に真っ直ぐな後進走行路として実施される、請求項2から6いずれか1項記載の方法。
- 前記パーキングスペース(2)が縦列型駐車スペースとして構成斜め向き駐車スペースとして構成されている場合に、検出手段(6a,6b)によってパーキング軌跡の第2区分(5a)に亘って徐々に拡大する間隔(d)が検出されると、前記第2区分(5a)は実質的に曲線進路として実施される、請求項2から6いずれか1項記載の方法。
- 少なくとも1つのパーキング軌跡に沿ったパーキングスペース(2)への車両(1)の駐車支援のための駐車支援装置において、
前記パーキング軌跡が第1の区分(3)と第2の区分(5a,5b)に分割されており、
前記第1の区分(3)と第2の区分(5a,5b)の間に中間点(4)が設けられており、
前記中間点(4)における車両(1)の配向は、縦列型駐車スペースとして又は斜め向き駐車スペースとして構成されているパーキングスペース(2)への後続の駐車が可能となるように決定されており、
前記パーキングスペース(2)の識別は、縦列型駐車スペースとしてのパーキングスペース(2)の識別又は斜め向き駐車スペースとしてのパーキングスペース(2)の識別が実行され得るように構成されていることを特徴とする駐車支援装置。 - 検出手段(6a,6b)が設けられており、該検出手段を用いて縦列型駐車スペースとしてのパーキングスペースの識別又は斜め向き駐車スペースとしてのパーキングスペースの識別が可能である、請求項9記載の駐車支援装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009028251A DE102009028251A1 (de) | 2009-08-05 | 2009-08-05 | Verfahren zum unterstützen Einparken in eine Parklücke und Vorrichtung hierzu |
| DE102009028251.3 | 2009-08-05 | ||
| PCT/EP2010/061316 WO2011015592A1 (de) | 2009-08-05 | 2010-08-03 | Verfahren zum unterstützten einparken in eine parklücke und vorrichtung hierzu |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013500902A true JP2013500902A (ja) | 2013-01-10 |
| JP5542935B2 JP5542935B2 (ja) | 2014-07-09 |
Family
ID=43027755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012523325A Expired - Fee Related JP5542935B2 (ja) | 2009-08-05 | 2010-08-03 | パーキングスペースへの駐車支援方法及び駐車支援装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8521366B2 (ja) |
| EP (1) | EP2462017B1 (ja) |
| JP (1) | JP5542935B2 (ja) |
| CN (1) | CN102574544B (ja) |
| DE (1) | DE102009028251A1 (ja) |
| WO (1) | WO2011015592A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018186406A1 (ja) * | 2017-04-07 | 2018-10-11 | クラリオン株式会社 | 駐車支援装置 |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011007017A1 (de) * | 2011-04-08 | 2012-10-11 | Robert Bosch Gmbh | Verfahren und Kontrollsystem zum Verstellen mindestens eines Außenspiegels eines Kraftfahrzeuges |
| DE102011113916A1 (de) * | 2011-09-21 | 2013-03-21 | Volkswagen Aktiengesellschaft | Verfahren zur Klassifikation von Parkszenarien für ein Einparksystem eines Kraftfahrzeugs |
| JP5845131B2 (ja) * | 2012-04-17 | 2016-01-20 | 株式会社日本自動車部品総合研究所 | 駐車空間検知装置 |
| CN104797478B (zh) * | 2012-11-27 | 2018-04-03 | 日产自动车株式会社 | 车辆用加速抑制装置以及车辆用加速抑制方法 |
| DE112013005948T5 (de) * | 2012-12-12 | 2015-10-01 | Honda Motor Co., Ltd. | Parkplatzdetektor |
| US9224297B2 (en) * | 2013-04-23 | 2015-12-29 | Ford Global Technologies, Llc | Park assist object distance measurement clock control |
| KR20150022436A (ko) * | 2013-08-23 | 2015-03-04 | 주식회사 만도 | 주차 제어 장치, 방법 및 시스템 |
| JP6231345B2 (ja) * | 2013-10-18 | 2017-11-15 | クラリオン株式会社 | 車両用発進支援装置 |
| US9333908B2 (en) | 2013-11-06 | 2016-05-10 | Frazier Cunningham, III | Parking signaling system |
| WO2015150864A1 (en) | 2014-04-01 | 2015-10-08 | Audi Ag | Automatic parking method and device |
| US9384662B2 (en) | 2014-04-17 | 2016-07-05 | Ford Global Technologies, Llc | Parking assistance for a vehicle |
| US9666074B2 (en) | 2014-08-21 | 2017-05-30 | Ford Global Technologies, Llc | Method and system for vehicle parking |
| GB2533612B (en) * | 2014-12-23 | 2019-04-17 | Bae Systems Plc | Monitoring a structure for damage |
| CN104627068B (zh) * | 2015-01-27 | 2017-01-18 | 江苏大学 | 一种自动泊车过程中车身航向角的计算方法 |
| DE102015203619A1 (de) * | 2015-02-28 | 2016-09-01 | Bayerische Motoren Werke Aktiengesellschaft | Parkassistenzsystem mit Erkennung einer Universalparklücke |
| US9610943B2 (en) | 2015-03-05 | 2017-04-04 | Ford Global Technologies, Llc | System and method for parallel parking a vehicle |
| JP6547495B2 (ja) * | 2015-07-31 | 2019-07-24 | アイシン精機株式会社 | 駐車支援装置 |
| US10392009B2 (en) | 2015-08-12 | 2019-08-27 | Hyundai Motor Company | Automatic parking system and automatic parking method |
| KR101704244B1 (ko) * | 2015-08-12 | 2017-02-22 | 현대자동차주식회사 | 원격 주차 장치 및 주차 방법 |
| US11691619B2 (en) | 2015-08-12 | 2023-07-04 | Hyundai Motor Company | Automatic parking system and automatic parking method |
| US10185319B2 (en) * | 2015-11-16 | 2019-01-22 | Ford Global Technologies, Llc | Method and device for assisting a parking maneuver |
| US10481609B2 (en) | 2016-12-09 | 2019-11-19 | Ford Global Technologies, Llc | Parking-lot-navigation system and method |
| EP3401699A1 (en) * | 2017-05-09 | 2018-11-14 | Veoneer Sweden AB | Vehicle environmental detection system for parking detection |
| DE102017208385A1 (de) * | 2017-05-18 | 2018-11-22 | Ford Global Technologies, Llc | Verfahren zum Unterstützen eines Einparkvorgangs eines Kraftfahrzeugs, elektronisches Einparkhilfesystem sowie Kraftfahrzeug |
| KR102001916B1 (ko) * | 2017-05-30 | 2019-07-19 | 엘지전자 주식회사 | 주차 보조 시스템 |
| JP6843712B2 (ja) * | 2017-07-27 | 2021-03-17 | フォルシアクラリオン・エレクトロニクス株式会社 | 車載処理装置 |
| DE102017120765A1 (de) | 2017-09-08 | 2019-03-14 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Charakterisieren einer von zwei Objekten begrenzten Parklücke für ein Kraftfahrzeug, Parkassistenzsystem sowie Kraftfahrzeug |
| CN107650906B (zh) * | 2017-09-22 | 2020-06-02 | 合肥晟泰克汽车电子股份有限公司 | 智能泊车系统及其控制方法 |
| US10384718B1 (en) * | 2018-03-26 | 2019-08-20 | Zoox, Inc. | Vehicle parking assist |
| US20190367011A1 (en) * | 2018-06-04 | 2019-12-05 | Ford Global Technologies, Llc | Hybrid Electric Vehicle With Park Assist |
| CN110758379B (zh) * | 2018-07-27 | 2020-11-13 | 广州汽车集团股份有限公司 | 一种斜列泊车位检测方法、装置以及自动泊车方法和系统 |
| CN113119954B (zh) * | 2019-12-31 | 2025-08-29 | 罗伯特·博世有限公司 | 用于控制泊车辅助的方法及装置 |
| CN111547048B (zh) * | 2020-04-30 | 2022-05-06 | 惠州华阳通用电子有限公司 | 一种斜式车位自动泊车方法及装置 |
| CN111731275B (zh) * | 2020-06-30 | 2021-12-07 | 中国第一汽车股份有限公司 | 空间斜向车位自动泊车方法、装置、车辆及存储介质 |
| US11335194B1 (en) * | 2021-03-26 | 2022-05-17 | Toyota Research Institute, Inc. | Inverse parking distance control system |
| TWI795006B (zh) * | 2021-09-30 | 2023-03-01 | 台灣立訊精密有限公司 | 圖形化超音波模組及駕駛輔助系統 |
| US12509062B2 (en) * | 2023-03-22 | 2025-12-30 | Aptiv Technologies AG | Parking path search using a modified parking path algorithm |
| KR20260004107A (ko) * | 2024-07-01 | 2026-01-08 | 삼성전자주식회사 | 이동체의 자율 주차를 제어하는 전자 장치 및 그 동작 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63191987A (ja) * | 1987-02-04 | 1988-08-09 | Daihatsu Motor Co Ltd | 車庫入れ・縦列駐車ガイド装置 |
| JP2003252150A (ja) * | 2002-02-26 | 2003-09-10 | Toyota Central Res & Dev Lab Inc | 駐車種類判定装置 |
| JP2008284969A (ja) * | 2007-05-16 | 2008-11-27 | Aisin Seiki Co Ltd | 駐車支援装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3927512B2 (ja) * | 2003-03-27 | 2007-06-13 | トヨタ自動車株式会社 | 駐車支援装置 |
| DE102006052575A1 (de) * | 2006-11-08 | 2008-05-21 | Volkswagen Ag | Parklenkassistent mit verbesserter Quereinparkfunktion |
| WO2008081655A1 (ja) * | 2006-12-28 | 2008-07-10 | Kabushiki Kaisha Toyota Jidoshokki | 駐車支援装置、駐車支援装置部品、駐車支援方法、駐車支援プログラム、車両走行パラメータの算出方法及び算出プログラム、車両走行パラメータ算出装置並びに車両走行パラメータ算出装置部品 |
| DE102007027438A1 (de) | 2007-06-14 | 2008-12-18 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Steuerung eines Parkassistenzsystems für Fahrzeuge |
| ATE548245T1 (de) * | 2008-04-03 | 2012-03-15 | Valeo Schalter & Sensoren Gmbh | Verfahren und vorrichtung zur unterstützung eines fahres eines fahrzeugs beim ausparken aus einer parklücke |
| US8799037B2 (en) * | 2010-10-14 | 2014-08-05 | Palto Alto Research Center Incorporated | Computer-implemented system and method for managing motor vehicle parking reservations |
-
2009
- 2009-08-05 DE DE102009028251A patent/DE102009028251A1/de not_active Withdrawn
-
2010
- 2010-08-03 EP EP10742467.3A patent/EP2462017B1/de not_active Not-in-force
- 2010-08-03 JP JP2012523325A patent/JP5542935B2/ja not_active Expired - Fee Related
- 2010-08-03 WO PCT/EP2010/061316 patent/WO2011015592A1/de not_active Ceased
- 2010-08-03 CN CN201080044831.9A patent/CN102574544B/zh active Active
- 2010-08-03 US US13/388,402 patent/US8521366B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63191987A (ja) * | 1987-02-04 | 1988-08-09 | Daihatsu Motor Co Ltd | 車庫入れ・縦列駐車ガイド装置 |
| JP2003252150A (ja) * | 2002-02-26 | 2003-09-10 | Toyota Central Res & Dev Lab Inc | 駐車種類判定装置 |
| JP2008284969A (ja) * | 2007-05-16 | 2008-11-27 | Aisin Seiki Co Ltd | 駐車支援装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018186406A1 (ja) * | 2017-04-07 | 2018-10-11 | クラリオン株式会社 | 駐車支援装置 |
| US11293764B2 (en) | 2017-04-07 | 2022-04-05 | Clarion Co., Ltd. | Parking assistance device |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2462017A1 (de) | 2012-06-13 |
| WO2011015592A1 (de) | 2011-02-10 |
| US20120197492A1 (en) | 2012-08-02 |
| CN102574544A (zh) | 2012-07-11 |
| EP2462017B1 (de) | 2013-10-16 |
| JP5542935B2 (ja) | 2014-07-09 |
| US8521366B2 (en) | 2013-08-27 |
| DE102009028251A1 (de) | 2011-02-10 |
| CN102574544B (zh) | 2015-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5542935B2 (ja) | パーキングスペースへの駐車支援方法及び駐車支援装置 | |
| CN103209875B (zh) | 用于在多个适合用于泊车的泊车位中选择一个泊车位的方法 | |
| US10246131B2 (en) | Method for carrying out a parking process of a motor vehicle into a transverse parking space, parking assistance system and motor vehicle | |
| JP6356350B2 (ja) | 自動車両の周辺区域内における少なくとも1つの物体を検出するための方法、運転者支援システム、および自動車両 | |
| JP6474888B2 (ja) | 自動車を少なくとも半自律的に操縦する方法、運転者支援システムおよび自動車 | |
| US8560175B2 (en) | Method and device for assisting a driver of a vehicle in exiting from a parking space | |
| US9045160B2 (en) | Method and device for assisting the driver of a motor vehicle | |
| EP2990273A1 (en) | Parking assist device | |
| JP5431578B2 (ja) | 車両の駐車支援のための装置及び方法 | |
| JP2010018180A (ja) | 駐車支援装置及び駐車支援方法 | |
| CN102310857A (zh) | 用于横向泊车位的泊车辅助系统 | |
| CN102596691A (zh) | 用于在从泊车位中泊出时进行支持的方法 | |
| CN104228829A (zh) | 停车控制方法、设备和系统 | |
| KR20100101566A (ko) | 자동차 주차시의 경로 플래닝 방법 및 장치 | |
| JP6500435B2 (ja) | 駐車支援装置 | |
| CN109421800A (zh) | 转向辅助装置 | |
| KR20120039647A (ko) | 차량 주차 보조 장치 및 방법 | |
| US20170158240A1 (en) | Method for assisting a driver of a motor vehicle when parking, driver assistance system, and motor vehicle | |
| US11001253B2 (en) | Method for maneuvering a motor vehicle with movement of the motor vehicle into a detection position, driver assistance system and motor vehicle | |
| JP5983276B2 (ja) | 駐車支援装置 | |
| JP5837199B2 (ja) | 自動車ドライバの運転操作を支援する方法及び装置 | |
| CN117500708A (zh) | 轨迹优化方法 | |
| JP2019032607A (ja) | 駐車支援装置 | |
| US12179743B2 (en) | Moving object determination device | |
| JP6020021B2 (ja) | 駐車支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130513 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130516 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130808 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130815 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130913 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5542935 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |