本発明の目的は、医療処置のための外科用の圧縮ガイド、ならびに当該ガイドの製造方法および使用方法を提供することである。具体的には、外科用ガイドが皮膚を貫通して軟部組織上に担持され、皮下組織を対象とする領域において、画像に基づいてコンピュータにより計画された治療のための当該
ガイドを提供することが目的である。
本発明の利点は、手術の侵襲性を減少させつつ正確な誘導を提供したり、正確な手術が行いやすい位置に患者を固定したりする等、執刀医を大きく妨害しないガイドの提供を含んでいる。
上記の目的は、本発明に係る外科用の圧縮ガイドによって成し遂げられる。
本発明は、剛構造と、少なくとも1つの機能的な誘導部と、上記剛構造の位置決めをし、当該剛構造を圧縮により保持するための第1の手段であって、上記剛構造上の第1の位置に位置し、患者の身体における第1の部分のメス型形状を有する患者固有の第1の面を備え、上記第1の面を、上記患者の身体における上記第1の部分に保持するための第1の圧縮手段をさらに備えた第1の手段と、上記剛構造の位置決めをし、当該剛構造を圧縮により上記患者の身体における第2の部分に保持するための第2の手段であって、上記剛構造上において上記第1の位置から離れた第2の位置に位置し、上記患者の身体における上記第2の部分の少なくとも一部のメス型形状を有する患者固有の第2の面を備え、上記第2の面を、上記患者の身体における上記第2の部分に保持するための第2の圧縮手段をさらに備えた第2の手段とを備えていることを特徴とする道具を提供する。
第1の面は、第2の面と同じであってもよいし、第2の面の拡張部分であってもよい。圧縮によって剛構造の位置決めをし、当該剛構造を保持する第1または第2の手段は、身体の第1または第2の部分に対して第1または第2の面の位置決めをして、第1または第2の面を固定してもよい。圧縮によって剛構造の位置決めをし、当該剛構造を保持する第1または第2の手段のうち少なくとも1つは、身体の第1または第2の部分のそれぞれに対して、第1または第2の面のそれぞれの位置決めをして、第1または第2の面を固定することが好ましい。「第1または第2」という用語は、本願における時系列とは関係性がないことに留意されたい。「位置決めをして固定する」という用語は、皮下に骨を有する身体部分に固定して、安定した固定が得られるように設計された固定装置を指し、その結果として安定した配置がもたらされる。第1の配置装置は、位置固定を可能にする剛構造の位置決めをして、当該剛構造を保持するための第1および第2の手段のいずれでもよい。第1の配置装置に対応する面(例えば、第1の面)は患者固有のものであり、特定の患者の身体の関連部分のメス型形状を有していることが好ましい。代わりに、剛構造の位置決めをし、当該剛構造を保持するための第1または第2の手段が、皮膚の軟部組織上に位置するように設計されていてもよい。得られる固定は、位置固定手段によって得られる固定と比べて、概して正確性に劣る。これは、下部の骨が厚い軟部組織の層(例えば、皮膚、筋肉、および/または脂肪)によって覆われているためである。また、その結果、最小限の軟部組織で覆われた骨への固定に比べて、安定性に劣る。剛構造と協同して、身体部分(皮膚レベルだけでなく、下部の骨および解剖学的構造まで)に対するガイドの自由度を制限することによって、全体的に正確な配置を実現するのは、誘導部第1および第2の手段の組み合わせによるものである。圧力をかけながら骨に合わせていくことによって、患者の骨格が既知または固定の位置を維持するための任意の距離にわたって、当該骨格に対して関連位置が特定される。用途によっては、第1および第2の手段は、複数の面に備えられた複数のクランプを含む。さらに、第1および第2の手段から残されている自由度がすべて排除されるまで、位置決めをして保持するための第3、第4、…の手段を必要に応じて用いてもよい。これによって、安定した特有の配置が得られる。
ガイド装置全体の動きにおける特定の自由度を制限するために、下部の剛性に接近することができる皮膚の表面領域に固定するように設計された固定手段を使用するのは意識的な使用法である。当該ガイド全体の動きが、従来の技術において手動で圧迫されたまたは捻られた軟部組織用ガイドと、本発明とを区別する。ガイド装置が、関節を有する身体部分(すなわち、関節)に及ぶとき、自由度を取り除くために、術前に規定された位置に関節を有する生体組織を自身のメカニズムによって固定する位置固定手段を用いてもよい。この場合、第1および第2の手段の間の距離および角度は、一意的に誘導部を誘導部配置するようになっている。第1および第2の手段は、関節のいずれの側に配置されていてもよく、関節の構造自身が、固定するための第1または第2の手段として機能してもよい。
剛構造の配置と、剛構造の位置決めをして、当該剛構造を保持するための第1および/または第2の手段によって使用される圧縮保持手段とは、非侵襲性である。例えば、ネジあるいは他の侵襲性の部品は一切使用されておらず、鼓形の圧縮クランプが使用されている。したがって、配置目的のための皮膚を通して、ネジを骨に取り付けたり、従来の剛性面ガイド(すなわち、欧州特許第0756735号明細書に記載されているような、完全化された医学モデル)が取り付けられた下部の骨の表面露出するための切開の大きさを増大させたりする必要がない。剛構造の位置決めをして、当該剛構造を保持するための第1および第2の手段によって使用される圧縮手段は、例えば円周クランプまたは鋏クランプによって圧縮してもよい。剛構造の位置決めをして、当該剛構造を保持するための第1または第2の手段の円周クランプにおいては、圧縮は異なる技術を用いて実現してもよい(例えば、身体の周りを包むストラップを使用してもよい)。例えば、圧力パッドをクランプにおける患者固有の表面に組み入れるか、またはストラップに張力計を装着する等して、特定の圧力を計画または提供できるように、圧縮する力を測定および表示してもよい。
第1および/または第2の面は、皮膚の軟部組織(下に骨組織があるもの)と直接接触していてもよい。
本発明の一実施形態において、第1および/または第2の面は、患者の医療画像(例えば、セグメンテーション等によって面が生成され得る光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)から、積層造形法(例えば、ラピッドプロトタイピング製造技術)によって直接生成してもよい。第1および/または第2の面は、患者の身体部分のメス型に相当し、患者固有の面である。このようにして、第1および/または第2の面は、身体の関連部分に合う(すなわち、両者の面は正確に一致する)。本実施形態において、患者は外科用、治療用、または診断用の完成した道具(例えば、外科用のガイドフレーム)を、その後の外科行為、治療行為、または診断行為のために身につける。
他の実施形態では、機能的な誘導部を持たない装置が、まず患者に取り付けられ、その後、患者の光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等が撮影される。これらの画像に基づいて、機能的な誘導部(装置を誘導する部材)が誘導部設計される。機能的な誘導部は、執刀医が跡を追う誘導システムであってもよいし、誘導部ドリル孔または切断面等を規定するドリルまたは外科用ガイド等の物理的なガイドであってもよい。機能的な誘導部は、誘導システムにおいて使用される基準マーカであってもよい。また、本実施形態においては、第1および/または第2の面は、積層造形法(例えば、ラピッドプロトタイピング製造技術)によって、患者の医療画像から直接的に生成してもよい。
剛構造は、ここで「患者の身体部分のメス型形状」と規定される患者固有の面を必ずしも有しているわけではない。剛構造は、機能的な誘導部(存在する場合)、誘導部ならびに位置決めをして保持するための第1および第2の手段の取り付けを可能にするための種々の位置に固定手段を有していてもよい。機能的な誘導部および/または剛構造上の位置決めをするための第1および/または第2の手段の位置は、患者の少なくとも1つの医療画像を用いてなされた手術計画に基づいて、術前に規定される。
したがって、本発明は、外科用、治療用、または診断用の道具(すなわち、外科用ガイド)の新しい設計を提案する。当該道具は、患者の皮膚の所定の軟部組織領域上に正確に固定され、外科的介入の対象を正確に定め、当該外科的介入の調整を可能にする機械的誘導システムであって、医療画像に基づく機械的誘導システムの使用に基づいていてもよい。システムの設計が有する圧縮に起因して、これらのガイドは、執刀医、または骨を貫通してガイドを固定するために皮膚に通すネジおよびピンによって、所定の位置に保持される必要はない。なお、上記のネジおよびピンが骨を貫通してガイドを固定することによって生じる空間は、ガイドを固定する以外の他の外科的な目的では使用されない。
正確な固定は、最小限の軟部組織の層を介して、骨を圧縮する(好ましくは、非侵襲性に)剛構造の位置決めをして、当該剛構造を保持するための第1および/または第2の手段を位置固定することによって、得られる。剛構造の位置決めをして、当該剛構造を保持するための第1および/または第2の手段の配置部または固定部は、薄い軟部組織に覆われている骨部分(例えば、膝の真上にある大腿骨の遠位部分等)において固定される。剛構造(例えば、フレーム等)は、当該剛構造の位置決めをして、当該剛構造を保持するための第1および第2の手段のいずれか一方の位置固定の位置から、正確な固定を誘導部の位置に転送する。他方の第1または第2の手段は、位置確認の付加的な補助(すなわち、固定化)を提供する。第1または第2の手段のいずれか一方によって規定された、位置の修正を誘導部に提供してもよい。
本発明においては、フレーム部等のフレーム部剛構造が設けられており、2つ以上の配置部または固定部は、患者の軟部組織の周りにフレーム部を配置するための手段として機能しているフレーム部。上記の剛構造(例えば、フレーム)の利点は、骨部分の固定配置があるところから遠く離れた厚い軟部組織領域において機械的な基準を提供することである。加えて、剛構造またはフレームは、本体または本体の一部分(例えば、背)を再現可能な位置に正確に至らせるために使用してもよい。その結果、ガイドによる外科行為が行われるとき、患者の異なる身体部分の関連位置は、画像取得段階、医療画像のデータセットにおける手術計画段階、および手術実行段階の間、同一である。
したがって、剛構造(例えば、フレーム)は、厚い軟部組織の層によって覆われた部分上に固定するための第1および第2の手段に関して、機能的誘導部を関連配置するため誘導部の補助をする。これらの誘導部は誘導部、任意の種類の3次元画像技術(光学画像、CT画像、MRI画像、PET画像、または超音波画像等)を用いてなされた所定の手術計画に基づいて、執刀医が治療行為、診断行為、または外科行為(例えば、生検針の挿入、基準ピンの設置、穿孔、または骨切断等の外科的な切開等)を正確に実施することを可能にする。場合によっては、機能的な誘導部は、電子的外科誘導システムを備えていてもよいし、当該システムと接続されていてもよい。また、機能的な誘導部は、電子的外科誘導システムの基準であってもよい。
患者の軟部組織の周りで剛構造の位置決めをして、当該剛構造を保持する第1および第2の手段に取り付けられている当該剛構造(例えば、フレーム)は、軟部組織領域を圧縮する手段と連動して、誘導部の正確な配置を保証する。これは、第2の手段の位置が残っている自由度を制限すると同時に、下部の剛体構造に近い体表面により精度よく固定するために第1の手段が身体の一部分を圧縮することによって実現される。下部の軟部組織を既知の深さまで、あるいは既知の圧力で圧縮することによって、下部の剛性の生体組織は圧縮されている軟部組織を規定する。この圧縮は、固定および圧縮するための第1および第2の手段によって、関心領域を完全に包むことによって実現できる。
固定部を含む第1および第2の手段であって、位置決めをし、保持するための第1および第2手段のうち1つは、誘導システム全体の自由度を必ずしも固定しないが、すべての配置部または固定部の組み合わせは、安定した特異な固定を保証すべきである。例えば、大腿骨における遠位部分の側面は、片面にそれぞれ1つのフレーム部材を配置または固定して、2つのフレーム部材の配置領域または固定領域として用いることができる。2つのフレーム部材を制御して覆い包むことにより、大腿骨と比較して安定した得意な配置が得られる。これによって、ガイドの転送させる自由度が排除される。
剛構造(例えば、フレーム)上に、複数の配置部または固定部を組み込むことによって、全体的な安定感と特異さとが得られる。
本発明のフレーム部剛構造(例えば、フレーム部)は、特定の誘導部を配置することができる装置であれば、いかなる装置であってもよく、特異な部分が、それぞれ互いに特定の距離だけ離れた設置されるか、生体組織構造の基準となればよい。誘導部また、剛構造は、患者固有の部分(すなわち、患者の身体の一部分のメス型形状を有する部分)を持つ標準部材を混合したものであってもよい。フレーム部フレーム部は、異なる紫檀部分に適合可能であってもよい。
フレーム部フレーム部は、1人の患者ごとに使い捨ててももよいし、複数回使用してもよい。使い捨ての剛構造またはフレーム部フレーム部としては、患者をスキャンする前に作られたギプスが挙げられる。取り除きやすい部材によって、剛構造を製造することが好ましい。患者がスキャンされた日から手術日まで、患者が剛構造を身に着ける必要がある代替案は、あまり好ましいとは言えない。さらに、患者が剛構造を身につけている間、当該剛構造に患者を固定する必要がある場合には実行できないことはないが、誘導部の導入により手間がかかってしまう。
通常、体へ塗布されるギプス、または他の硬い成形材料および造形材料は、半分に分けられることによって、取り除きやすく、かつ、再度一緒に取り付けやすくされている。配置部または固定部を有する第1および/または第2の手段であって、位置決めをして、保持するための第1および/または第2の手段は、正確な配置が行われるべき適切な領域において圧縮を引き起こすために、ポジティブトレランスを有し得る。鋳物の代用品として、発泡性のフォームを使用してもよい。
上記の方法によって、患者にとって心地よい大きな剛構造を製造することが可能である一方、上記の方法では時間がかかり、費用が高いという不利な点を有している。さらに、誘導部の配置および外科的アプローチを可能にする剛構造に成形されるように、誘導部ギプスはその後の手術に適合されるべきである。したがって、剛構造に、鋳造可能な材料を使用することは便利なアプローチではあるが、多くの用途おいて好適な実施形態ではない。しかしながら、極めて大きなサイズの肥満患者を対象にした脊椎関連の用途等、用途によっては上記のアプローチが経済的に好適な唯一の代替案となり得る。
上記で規定されたように、外科用、治療用、または診断用の道具(すなわち、医療処置のための外科用の圧縮ガイド)を固定する方法を組み入れることによって、外科的介入を行うために、計画された誘導部の誘導部得られる。誘導部は、固定された下部の生体組織に対する手術器具の位置、深さ、および/または並進運動を規定する。誘導部は、穿孔または挿入の方向および深さを規定する孔、または線形または非線形の切開を可能にするスロット等、非常に簡素な部材であり得る。あるいは、いくつかの制限された方向への動きを可能にするより複雑なシステムでもあり得る。また、誘導部は、上述した剛構造に位置する安定した基準を発見する完璧な誘導システムであり得る。本発明の好適な実施形態においては、治療用、診断用、または外科用の道具(すなわち、本発明に係る外科用の圧縮ガイド)は、1人の患者のための特注品であってもよい。あるいは、予め定められた複数のサイズに標準化されたものであってもよい。誘導部は、手術器具(例えば、内視鏡または生検針)を経皮的に誘導してもよいし、皮膚の表面上の位置に手術器具(例えば、外科用メス)を誘導してもよいし、外科的に露出された皮下の対象物に手術器具を誘導してもよい。誘導部は、直接的に手術器具を誘導してもよいし、従来の外科的介入装置を配置するための第2の手段を固定された位置に設置してもよい(例えば、標準的な切断ブロックを配置するピンを誘導する)。
フレーム部剛構造(例えば、フレーム部の形状をしたもの)は、付加的製造技術または積層造形技術(例えば、ラピッドプロトタイピング、または他の付加的製造技術)、もしくは周知のCNC技術を用いて製造され得る。
ネガティブトレランスまたは緩衝部材が、剛構造の部材として設けられていることが好ましい。
これらの対策は、患者の皮膚、特に治療用、診断用、または外科用の道具(すなわち、外科用ガイド)全体の異なる構成部材が結合している領域を締め付けたり、圧迫したりしないように講じられている。
本発明の他の好適な実施形態においては、治療用、診断用、または外科用の道具(すなわち、本発明に係る外科用の圧縮ガイド)は、治療診断または外科的介入を計画および/または実行するために使用されるスキャン方法に適合する材料で構成され得る。
剛構造(例えば、フレーム部)を患者の軟部組織領域の周りに配置するための手段の少なくとも1つは、特定の外科的介入に特有であり、固定された無線不透過性の構成部材を限られた数で形成したものである。例えば、手術のコンピュータ支援計画のためにスキャン方法としてCTが使用されるとき、一部または全部がバリウムと均一に混合されたポリウレタン発泡部材によって、外科用ガイドを製造し得る。剛構造は、整形外科のギプスのように取り付けられ、スキャン中に患者は心地よく身につけていることができる。ポリウレタン発泡部材は、患者固有(すなわち、患者の身体の一部分のメス型形状を有する)の配置部または固定部、および誘導部によって選択的に置き換えられてもよい。当該配置部または固定部、および誘導部は、手術中とスキャン中との間で身体の関連部分をまったく同一の位置に配置するために、構造に剛性を与える。これによって、医療画像に基づく計画を手術室内で支障なく再現させることができる。
軟部組織領域の圧縮手段は、身体の周りを固定する剛構造上のベルトの組み立て部品であることが好ましい。
患者にとって有利なことに、特別な装置を装着せずに患者を撮影した通常の医療用画像のデータセットに基づいて、治療用、診断用、または外科用の道具の種々の部材を設計することが可能である。このような場合、圧縮による軟部組織のくぼみを補償するために、剛構造上の接合面にポジティブトレランスを組み込むことが好ましい。
代わりに、患者の軟部組織領域の周りに剛構造を配置するための手段、および軟部組織を圧縮するための手段は、身体の至るところにある構成部材を設計することによって生成され得る。次いで、圧縮が不要の領域においては、ネガティブオフセットを使用することが勧められる。剛構造の一部分は、他の機械的な方法によって一緒にネジ止めされたか、一緒に取り付けられた複数の剛性部材によって形成され得る。
本発明の他の好適な実施形態においては、軟部組織領域の圧縮するための手段は、膨張可能な領域を備えている。
このようにして、圧縮の圧力は、例えば膨張可能な領域の圧力を読み取ることによって調整され得る。したがって、患者の身体に対して既に取り付けられた本発明の装置によって当該患者がスキャンされている場合でも、当該患者のスキャン中と手術中との間で圧力を等しいことが保障され得る。
本発明の他の好適な実施形態に係る機能的な誘導部は、剛構造の特定の細部と一致する。
治療用、診断用、または外科用の道具(例えば、本発明に係る外科用の圧縮ガイド)は、医療処置をする際(特に治療用、診断用、または外科用の道具(例えば、外科用ガイド)が軟部組織上に担持されている領域において)使用されることが好ましい。
治療用、診断用、または外科用の道具(例えば、本発明に係る外科用ガイド)を使用するのに適当な領域となる身体区域は、頭蓋骨、眼窩、頭蓋低、肩の上部、鎖骨、骨盤の腸骨稜、大腿骨の遠位部分、脛骨の近位部分、脛骨の前面、肘関節、足首および足の骨における多重領域、ならびに特別な治療を施すための腕および手の領域である。
本発明は、上述の通りにガイドの製造方法を含む。本方法は、ラピッドプロトタイピングまたは積層造形法等の付加的製造方式を含んでいる。
本発明は、剛構造を備え、かつ機能的な誘導部と一緒に用いる外科用、治療用、または診断用のガイドを患者の身体に取り付けるための方法であって、上記剛構造の位置決めをし、当該剛構造上の第1の位置において、患者の身体における第1の部分のメス型形状を有する患者固有の第1の面によって、上記患者の身体における上記第1部分に上記剛構造を圧縮保持するステップと、上記剛構造の位置決めをし、当該剛構造上の上記第1の位置から離れた第2の位置において、上記患者の身体における第2の部分の少なくとも一部のメス型形状を有する患者固有の第2の面によって、上記患者の身体における上記第2部分に上記剛構造を圧縮保持するステップとを含むことを特徴とする方法を提供する。
位置決めおよび保持ステップは、非侵襲性であることが好ましい。取り付ける理由は、スキャン(例えば、MRI、CTスキャン、超音波スキャン、PETスキャン、またはこれらに類似するもの)のためであってもよい。
第1または第2の位置決めおよび保持ステップは、身体の第1または第2の部分に対して位置固定するステップを含んでいてもよい。第1および第2の位置決めおよび保持ステップのうち少なくとも1つは、身体の第1または第2の部分のそれぞれに対して位置固定するためであることが好ましい。「位置固定」という用語は、表面下の骨を有する身体の一部分に対して安定した固定がなされるように設計されたクランプを意味する。最初の配置ステップは、位置固定が可能であれば、第1および第2の位置決めおよび保持ステップのどちらであってもよい。代わりに、第1または第2の位置決めおよび保持ステップは、軟部組織上に配置するように設計されていてもよい。得られる固定は、位置固定によって得られる固定と比べて、概して正確性に劣る。これは、下部の骨が厚い軟部組織の層(例えば、皮膚、筋肉、および/または脂肪)によって覆われているためである。また、その結果、最小限の軟部組織で覆われた骨への固定に比べて、安定性に劣る。剛構造と協同して、身体部分(皮膚レベルだけでなく、下部の骨および有機構造まで)に対して、全体的に正確に誘導部を配置することができるのは、第1および第2の手段の組み合わせによるものである。用途によっては、複数の面に備えられた複数のクランプを含んでもよい。
ガイド装置全体の動きにおける特定の自由度を制限するために、下部の剛性に接近することができる皮膚の表面領域に固定するように設計された固定手段を使用するのは意識的な使用法である。当該ガイド全体の動きが、従来の技術において手動で圧迫されたまたは捻られた軟部組織用ガイドと、本発明とを区別する。ガイド装置が、関節を有する身体部分(関節)に及ぶとき、自由度を取り除くために、規定された位置に関節を有する生体組織を自身のメカニズムによって固定する位置固定を用いてもよい。
上記の方法は、付加的製造方式(例えば、ラピッドプロトタイピング処理等の積層造形法)によってガイドを製造するステップを含んでいてもよい。なお、上記のガイドは、いかなる付加的な製造方式によって製造してもよい。
上記の方法は、所定の位置にある外科用、治療用、または診断用のガイドを用いて患者をスキャンするステップと、スキャンステップの後に、機能的な誘導部を追加するステップとを含んでいてもよい。
本発明の他の特徴点および利点は、添付した図面を参照してなされる以下の詳細な説明で明らかになるであろう。なお、当該図面は、本発明の本質を例示的に示すものである。
本発明について、特定の図面を参照して、本発明の具体的な実施形態によって説明する。なお、本発明のこれらの実施形態に限定されるわけではなく、請求項に示した範囲内に限定される。
図1Aおよび1Bは、本発明に係る外科用の圧縮ガイド1を示す概略図である。
外科用の圧縮ガイド1は、外科用、治療用、または診断用の道具(本実施形態の場合は、大腿骨9外科手術)のための外科用ガイドフレーム)のための機械的な基準(例えば、医療処置を備えている。剛構造5が設けられており、当該剛構造5は、例えばフレームの形をしている。少なくとも1つの機能的な誘導部13が設けられている。誘導部13は、圧縮ガイド1に固定されており、例えば剛構造上の第1の位置において、当該剛構造5と直接的または間接的に任意に取り付け可能になっている。第1および第2の手段6,2は、患者の身体の各部(例えば、患者の軟部組織領域)の周りに、剛構造5の位置決めをして、当該剛構造5を圧縮保持する。誘導部13は、位置決めおよび圧縮保持のための第1および第2の手段2,6の1部であってもいい。剛構造の位置決めをして、当該剛構造を圧縮保持する第1および第2の手段6,2は、それぞれ患者の身体における一部分のメス型表面(例えば、膝の周りおよび大腿の周り)を有する第1(14)または第2(12)の面をそれぞれ有している。圧縮手段6,2は、患者の身体の関連部分に対して、第1および/または第2の面14,12をそれぞれ保持するために設けられている。
剛構造の位置決めをし、当該剛構造を圧縮により保持する第1および第2の手段6,2は、互いに間隔を置いて配置されており、いずれもフレーム5の一部であるか、またはフレーム5に取り付けられている。第1の手段6は、患者の身体の第1の部分(例えば、大腿)を固定するために、剛構造上の第1の位置に位置している。一方、位置決めおよび保持のための第2の手段2は、剛構造上の第1の位置から遠く離れた第2の位置に位置しており、身体の第2の部分(例えば、膝)を固定することを目的としている。好適な実施形態においては、剛構造の位置決めをし、当該剛構造を圧縮により保持する第1および第2の手段は、非侵襲性である。また、機能的な誘導部13を使用して実行される作業を除いて、外科用の圧縮ガイドは全体的に非侵襲性であることが好ましい。
剛構造の位置合わせをし、当該剛構造を圧縮により保持するための第1および第2の手段6,2のいずれか一方は、各々の第1または第2の面に、身体の第1または第2の部分をそれぞれ位置固定するための手段であってもよい。剛構造の位置合わせをし、当該剛構造を圧縮により保持するための第1および第2の手段6,2のうち少なくとも1つは、各々の第1または第2の面に、身体の第1または第2の部分をそれぞれ位置固定するための手段であることが好ましい。「位置固定」という用語は、皮下に骨を有する身体部分に固定して、安定した固定が得られるように設計された固定装置を指し、その結果として安定した配置がもたらされる。本実施形態では、第2の手段6は膝に固定するように設計されているが、膝の皮膚または軟部組織は比較的に薄いので、位置固定が得られる。したがって、この場合、剛性構造の位置合わせをし、当該剛性構造を保持するための第2の手段であって、位置固定を可能にする第2の手段が、最初の配置装置となる。剛性構造の位置合わせをし、当該剛性構造を保持するための第1の手段6は、大腿の軟部組織上に位置するように設計されている。得られる固定は、位置固定手段によって得られる固定と比べて、概して正確性に劣る。これは、下部の骨が厚い軟部組織の層(例えば、皮膚、筋肉、および/または脂肪)によって覆われているためである。また、その結果、最小限の軟部組織で覆われた骨への固定に比べて、安定性に劣る。第1および第2の手段には、円周クランプまたは包囲クランプが設けられていることが好ましい。剛構造と協同して、身体部分(皮膚レベルだけでなく、下部の骨および解剖学的構造まで)に対するガイドの全体的に正確な配置を実現するのは、第1および第2の手段の組み合わせによるものである。第1および第2の手段6,2の各々は、面14,12の固定を可能にする第1および第2のクランプ7,8,3,4をそれぞれ含んでいる。クランプ7,8,3,4が、身体部分を囲むまたは包む2つの半面を接続している状態が図示されており、当該クランプ7,8,3,4には、ネジ等を用いて面14,12を互いに押しつけるために用いられ得るフランジが設けられている。
図2(ならびに図3および図4)に示したように、骨9から第1の固定手段6の第1の面14までの距離10は、骨9Bと第2の固定手段2の第2の面との間の距離に比べて非常に大きい。これは、大腿には、膝には存在しない筋肉および脂肪からなる厚い層があるためである(軟部組織を図示せず)。
ガイド装置の動作全体の一定の自由度を制限するために使用され得る剛性が下部にある皮膚の表面領域に固定するように設計された第1および第2の固定手段6,2の使用は、手動で圧迫されたまたは捻られた従来の軟部組織用ガイドと比べて利点がある。
一実施形態では、剛構造またはフレーム部5は、鋳型またはギプス技術を使用して、固定手段6,2によって作られ得る。誘導部13の位置を決めるために、剛構造またはフレーム部5は、患者をスキャンする前に作ってもよい。ギプス、または他の硬い成形材料および造形材料を体に塗布して、患者固有の2つの包囲固定領域(内面に患者の身体の一部分のメス型を有する領域。例えば、大腿および膝の周り等)を形成する。ロッド状のフレーム5、ならびに固定手段3,4,7,8は、ギプスまたは造形材料に組み入れることによって、完璧な剛構造を形成してもよい。その後、固定領域を2つに分けたり、多数の断片に分けたりすることによって、取り除きやすく、かつ再度一緒に取り付けやすくすることができる。配置部または固定部3,4,7,8を含み、位置決めおよび保持のための第1および/または第2の手段は、正確な配置が行われるべき適切な領域において圧縮を引き起こすために、1層以上の材料を塗布する等して、ポジティブトレランスを有し得る。本発明の他の好適な実施形態においては、軟部組織領域の圧縮するための手段は、膨張可能な領域を備えている。このようにして、圧縮の圧力は、例えば膨張可能な領域の圧力を読み取ることによって調整され得る。したがって、患者の身体に対して既に取り付けられた本発明の装置によって当該患者がスキャンされている場合でも、当該患者のスキャン中と手術中との間で圧力を等しいことが保障され得る。
誘導部13は、所定の位置にある剛構造を用いて患者をスキャンした後に製造することができる。その結果、軟部組織の厚い層によって覆われた身体部分内または身体部分上で誘導が行われなければならないにも拘らず、剛構造(例えば、フレーム)は、機能的な誘導部の明確な配置のための基準として働く。剛構造(例えば、フレーム部)を患者の軟部組織領域の周りに配置するための手段の少なくとも1つは、特定の外科的介入に特有であり、固定された無線不透過性の構成部材を限られた数で形成したものである。例えば、手術のコンピュータ支援計画のためにスキャン方法としてCTが使用されるとき、一部または全部がバリウムと均一に混合されたポリウレタン発泡部材によって、外科用ガイド1を製造し得る。剛構造は、整形外科のギプスのように取り付けられ、スキャン中に患者は心地よく身につけていることができる。ポリウレタン発泡部材は、患者固有(すなわち、患者の身体の一部分のメス型形状を有する)の配置部または固定部、および誘導部によって選択的に置き換えられてもよい。当該配置部または固定部、および誘導部は、手術中とスキャン中との間で身体の関連部分をまったく同一の位置に配置するために、構造に剛性を与える。これによって、医療画像に基づく計画を実際の手術中に支障なく再現させることができる。
誘導部は、穿孔または挿入の方向および任意の深さを規定する孔、または線形または非線形の切開を可能にするスロット等、非常に簡素な部材であり得る。あるいは、いくつかの制限された方向への動きを可能にするより複雑なシステムでもあり得る。また、誘導部は、上述した剛構造に位置する安定した基準を発見する完璧な誘導システムであり得る。場合によっては、機能的な誘導部は、電子的外科誘導システムと接続されていてもよいし、電子的外科誘導システムの基準であってもよい。
誘導部は、任意の種類の3次元画像技術(光学画像、CT画像、MRI画像、PET画像、または超音波画像等)を用いてなされた所定の手術計画に基づいて、執刀医が治療行為、診断行為、または外科行為(例えば、生検針の挿入、基準ピンの設置、穿孔、または骨切断等の外科的な切開等)を正確に実施することを可能にする。
本発明の他の実施形態において、第1および/または第2の面14,12、ならびに第1および第2の固定手段6,2は、患者の医療画像(例えば、セグメンテーション等によって面が生成され得る光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)から、付加製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって直接生成してもよい。そのため、第1および/または第2の面14,12は、患者固有の面である(すなわち、患者の身体の一部分のメス型形状を有している)。このようにして、第1および/または第2の面14,12は、身体の関連部分に合う(すなわち、両者の面は正確に一致する)。本実施形態において、患者は外科用、治療用、または診断用の完成した道具(例えば、外科用のガイドフレーム)を、その後の外科行為、治療行為、または診断行為のために身につける。
また、フレーム5および誘導部13も、患者の医療画像(例えば、光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)をガイドとして使用する付加的製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって生成され得る。例えば、剛構造(例えば、フレーム部の形状をしたもの)は、付加的製造技術または積層造形技術(例えば、ラピッドプロトタイピング、または他の付加的製造技術)、もしくは周知のCNC技術を用いて製造され得る。
任意に、ネガティブトレランスまたは緩衝部材が、剛構造の部材として設けられていることができる。これらの対策は、患者の皮膚、特に治療用、診断用、または外科用の道具(例えば、外科用誘導システム)全体の異なる構成部材が結合している領域を締め付けたり、圧迫したりしないように講じられている。
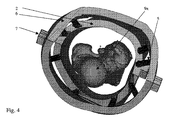
図5〜7は、本発明を使用するためのさらなる実施形態を示す。例えば、任意の種類の3次元画像技術(光学画像、CT画像、MRI画像、PET画像、または超音波画像等)を用いてなされた所定の手術計画に基づいて、手または手首に対して治療行為、診断行為、または外科行為(例えば、生検針の挿入、基準ピンの設置、穿孔、または骨切断等の外科的な切開等)を正確に実施することを可能にする使用法を示す。
本実施形態では、剛構造5は、第1、第2、および第3の面14A,12,14Bと一体になっている。すなわち、剛構造5は、第1、第2、および第3の面14A,12,14Bと一体的に形成されている。また、患者の手は、手首に対して特定の位置に保持されている。
本実施形態に基づけば、外科用の圧縮ガイド1は、外科用、治療用、または診断用の道具(例えば、手に対する医療処置のための外科用ガイドフレーム)のための機械的な基準を備えている。剛構造5が設けられており、当該剛構造5は、例えば患者固有の面形状をしている(すなわち、患者の身体の一部分のメス型形状を有している)。少なくとも1つの機能的な誘導部13が設けられている。誘導部13は、圧縮ガイド1に固定されており、例えば手首に近い剛構造上の第1の位置において、当該剛構造5と直接的または間接的に取り付けられている。本実施形態では、誘導部13は、ドリルガイドである。第1、第2、および第3の手段6a,2,6bは、患者の手および手首の一部分(例えば、患者の軟部組織領域)の周りに、剛構造5の位置決めをして、当該剛構造5を圧縮保持するためにそれぞれ設けられている。剛構造5の位置決めをし、当該剛構造5を圧縮保持するための第1、第2、および第3の手段6a,2,6bは、患者の手、指、または手首のメス型形状を有する第1(14a)、第2(12)、または第3(14b)の面をそれぞれ有している。圧縮手段6a,2,6bは、患者の身体の関連部分に対して、第1、第2、および第3の面14a,12,14bをそれぞれ保持するために設けられている。第1、第2、および第3の圧縮手段6A,2,6Bは、円周クランプまたは包囲クランプを提供することが好ましい。
剛構造の位置決めをし、当該剛構造を圧縮により保持する第1、第2、および第3の手段6a,2,6bは、互いに間隔を置いて配置されており、いずれもフレーム5と一体となっている。第1の手段6aは、患者の身体の第1の部分(例えば、手および指の上部)を固定するために、剛構造上の第1の位置に位置している。一方、位置決めおよび保持のための第2の手段2は、剛構造上の第1の位置から遠く離れた第2の位置に位置しており、身体の第2の部分(例えば、手と手首の関節)を固定することを目的としている。好適な実施形態においては、剛構造の位置決めをし、当該剛構造を圧縮により保持する第1、第2、および第3の手段は、非侵襲性である。また、機能的な誘導部を使用して実行される作業を除いて、外科用の圧縮ガイドは全体的に非侵襲性であることが好ましい。
剛構造の位置合わせをし、当該剛構造を圧縮により保持するための第2の手段は、第2の面12に、身体の第2の部分を位置固定するための手段である。本実施形態では、手および手首の関節部分の皮膚または軟部組織が比較的薄いため、当該手および手首の関節を固定することによって、位置固定を得るために第2の手段が設計されている。したがって、この場合、剛性構造の位置合わせをし、当該剛性構造を保持するための第2の手段であって、位置固定を可能にする第2の手段が、最初の配置装置となる。剛性構造の位置合わせをし、当該剛性構造を保持するための第1の手段6Aは、手および指の上部に位置するように設計されている。得られる固定は、位置固定手段によって得られる固定と比べて、概して正確性に劣る。これは、最小限の軟部組織で覆われた骨に固定する場合と比較して、指は可撓性を有しており、安定性に欠けるためである。剛性構造の位置合わせをし、当該剛性構造を保持するための第3の手段6Bは、手首または前腕に位置するように設計されている。剛構造と協同して、身体部分(皮膚レベルだけでなく、下部の骨および有機構造まで)に対するガイドの全体的に正確な配置を実現するのは、第1、第2、および第3の手段の組み合わせによるものである。第1、第2、および第3の手段6A,2,6Bの各々は、面14A,12,14Bの固定を可能にする第1、第2、および第3のクランプ7A,8A,3,4,7B,8Bをそれぞれ含んでいる。当該クランプ7A,8A,3,4,7B,8Bは、身体部分を取り囲むまたは包囲するストラップと一緒に用いられ、面14A,12,14Bに適合した身体部分に対して当該面14A,12,14Bを圧迫するために用いることができる。
ガイド装置の動作全体の一定の自由度を制限するために使用され得る剛性が下部にある皮膚の表面領域に固定するように設計された第1、第2、および第3の固定手段6A,2,6Bの使用は、手動で圧迫されたまたは捻られた従来の軟部組織用ガイドと比べて利点がある。
一実施形態では、剛構造またはフレーム部5は、鋳型またはギプス技術を使用して、固定手段6A,2,6Bによって作られ得る。誘導部13の位置を決めるために、剛構造またはフレーム部5は、患者をスキャンする前に作ってもよい。ギプス、または他の硬い成形材料および造形材料を、手首に対して所定の位置にある手に塗布して、1人の患者固有の包囲領域(内面に患者の身体の一部分のメス型形状を有する領域)を形成する。当該包囲領域には、固定領域が形成される。固定手段3,4,7A,8A,7B,8Bは、ギプスまたは造形材料に組み入れることによって、完璧な剛構造を形成してもよい。鋳物の代用品として、発泡性のフォームを使用してもよい。
誘導部13は、所定の位置にある剛構造を用いて患者をスキャンした後に製造することができる。その結果、軟部組織の厚い層によって覆われた身体部分内または身体部分上で誘導が行われなければならないにも拘らず、剛構造(例えば、フレーム)は、機能的な誘導部13の明確な配置のための基準として働く。剛構造(例えば、フレーム部)を患者の軟部組織領域の周りに配置するための手段の少なくとも1つは、特定の外科的介入に特有であり、固定された無線不透過性の構成部材を限られた数で形成したものである。例えば、手術のコンピュータ支援計画のためにスキャン方法としてCTが使用されるとき、一部または全部がバリウムと均一に混合されたポリウレタン発泡部材によって、外科用ガイド1を製造し得る。剛構造は、整形外科のギプスのように取り付けられ、スキャン中に患者は心地よく身につけていることができる。ポリウレタン発泡部材は、患者固有(すなわち、患者の身体の一部分のメス型形状を有する)の配置部または固定部、および誘導部によって選択的に置き換えられてもよい。当該配置部または固定部、および誘導部は、手術中とスキャン中との間で身体の関連部分をまったく同一の位置に配置するために、構造に剛性を与える。これによって、医療画像に基づく計画を実際の手術中に支障なく再現させることができる。
誘導部13は、穿孔または挿入の方向および任意の深さを規定する孔、または線形または非線形の切開を可能にするスロット等、非常に簡素な部材であり得る。あるいは、いくつかの制限された方向への動きを可能にするより複雑なシステムでもあり得る。また、誘導部は、上述した剛構造に位置する安定した基準を発見する完璧な誘導システムであり得る。場合によっては、機能的な誘導部は、電子的外科誘導システムと接続されていてもよいし、電子的外科誘導システムの基準であってもよい。
本発明の他の実施形態において、第1および/または第2および/または第3の面14A,12、14B、ならびに第1、第2、および第3の固定手段6A,2,6Bは、患者の医療画像(例えば、セグメンテーション等によって面が生成され得る光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)から、付加製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって直接生成してもよい。そのため、第1および/または第2および/または第3の面14A,12,14Bは、患者固有の面である(すなわち、患者の身体の一部分のメス型形状を有している)。このようにして、第1および/または第2および/または第3の面14A,12,14Bは、身体の関連部分に合う(すなわち、これらの面は正確に一致する)。本実施形態において、患者は外科用、治療用、または診断用の完成した道具(例えば、外科用のガイドフレーム)を、その後の外科行為、治療行為、または診断行為のために身につける。
また、フレーム5および誘導部13も、患者の医療画像(例えば、光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)をガイドとして使用する付加的製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって生成され得る。例えば、剛構造(例えば、フレーム部の形状をしたもの)は、付加的製造技術または積層造形技術(例えば、ラピッドプロトタイピング、または他の付加的製造技術)、もしくは周知のCNC技術を用いて製造され得る。
任意に、ネガティブトレランスまたは緩衝部材が、剛構造の部材として設けられていることができる。これらの対策は、患者の皮膚、特に治療用、診断用、または外科用の道具(例えば、外科用誘導システム)全体の異なる構成部材が結合している領域を締め付けたり、圧迫したりしないように講じられている。
図8〜10は、本発明を使用するためのさらなる実施形態を示す。例えば、任意の種類の3次元画像技術(光学画像、CT画像、MRI画像、PET画像、または超音波画像等)を用いてなされた所定の手術計画に基づいて、患者の背中または脊椎に対して治療行為、診断行為、または外科行為(例えば、生検針の挿入、基準ピンの設置、穿孔、または骨切断等の外科的な切開等)を正確に実施することを可能にする使用法を示す。
本実施形態では、剛構造5は、第1、第2、および第3の面14A,12,14B、ならびにクランプ6A,6B,2,6C,6Dに機械的に連結するフレームの形状をなしている。また、患者の脊椎は、特定の位置に保持されている。
本実施形態に基づけば、外科用の圧縮ガイド1は、外科用、治療用、または診断用の道具(例えば、背中または脊椎に対する医療処置のための外科用ガイドフレーム)のための機械的な基準を備えている。少なくとも1つの機能的誘導部13として、剛構造5も設けられている。誘導部13は、圧縮ガイド1に固定されており、例えば脊椎に近い剛構造上の第1の位置において、当該剛構造5と直接的または間接的に取り付けられている。本実施形態では、誘導部13は、ドリルガイドである。第1、第2、第3、第4、および第5の手段6a,2,6b,6c,6dは、患者の背中、肩、および大腿の一部分(例えば、患者の軟部組織領域)の周りに、剛構造5の位置決めをして、当該剛構造5を圧縮保持するためにそれぞれ設けられている。剛構造5の位置決めをし、当該剛構造5を圧縮保持するための第1、第2、および第3の手段6a,2,6bは、患者の背中または肩のメス型形状を有する第1(14a)、第2(12)、または第3(14b)の面をそれぞれ有している。圧縮手段6a,2,6bは、患者の身体の関連部分に対して、第1、第2、および第3の面14a,12,14bをそれぞれ保持するために設けられている。加えて、さらなる固定手段6c,6dが、フレーム5を患者の太腿に固定するために設けられている。大腿は、通常脂肪および/または筋肉の分の大きな厚みを有しているため、大腿を固定するにはその正確性に欠ける。
剛構造の位置決めをし、当該剛構造を圧縮により保持する第1、第2、第3、第4、および第5の手段6a,2,6b,6c,6dは、互いに間隔を置いて配置されており、いずれもフレーム5に接続されている。第1の手段6aは、患者の身体の第1の部分(例えば、一方の肩)を固定するために、剛構造上の第1の位置に位置している。一方、位置決めおよび保持のための第2の手段2は、剛構造上の第1の位置から遠く離れた第2の位置に位置しており、身体の第2の部分(例えば、患者の背中)を固定することを目的としている。また、第3の手段6bは、患者の身体の第3の部分(例えば、他方の肩)を固定するために、剛構造上の第3の位置に位置している。好適な実施形態においては、剛構造の位置決めをし、当該剛構造を圧縮により保持する第1〜第5の手段は、非侵襲性である。また、機能的な誘導部を使用して実行される作業を除いて、外科用の圧縮ガイドは全体的に非侵襲性であることが好ましい。
剛構造の位置合わせをし、当該剛構造を圧縮により保持するための第1および第3の手段6A,6Bは、共同して位置固定を提供する。したがって、この場合、剛性構造の位置合わせをし、当該剛性構造を保持するための第1および第3の手段であって、位置固定を可能にする第1および第3の手段の組み合わせが、最初の配置装置となる。剛構造の位置合わせをし、当該剛構造を圧縮により保持するための第4および第5の手段6C,6Dは、大腿の上部に位置するように設計されている。得られる固定は、位置固定手段によって得られる固定と比べて、概して正確性に劣る。これは、大腿が厚い筋肉および/または脂肪の層で覆われているためである。剛構造と協同して、身体部分(皮膚レベルだけでなく、下部の骨および有機構造まで)に対するガイドの全体的に正確な配置を実現するのは、第1〜第5の手段の組み合わせによるものである。第1〜第5の手段6A,2,6B、6C,6Dの各々は、面14A,12,14Bの肩および背中への固定、ならびにフレーム5の大腿への固定を可能にするクランプ7A,3,4,7B,7C,7Dをそれぞれ含んでいる。当該クランプ7A,3,4,7B,7C,7Dは、身体部分を取り囲むまたは包囲するストラップと一緒に用いられ、剛構造に適合した身体部分に対して当該剛構造を圧迫するために用いることができる。
ガイド装置の動作全体の一定の自由度を制限するために使用され得る剛性が下部にある皮膚の表面領域に固定するように設計された第1〜第5の固定手段6A,7A,2,3,4,6B,7B,6C,7C,6D,7Dの使用は、手動で圧迫されたまたは捻られた従来の軟部組織用ガイドと比べて利点がある。
一実施形態では、剛構造またはフレーム部5は、鋳型またはギプス技術を使用して、固定手段6A,2,6B,6C,6Dによって作られ得る。誘導部13の位置を決めるために、剛構造またはフレーム部5は、患者をスキャンする前に作ってもよい。ギプス、または他の硬い成形材料および造形材料を、所定の位置にある背中に塗布して、1人の患者固有の包囲領域(内面に患者の身体の一部分のメス型形状を有する領域)を形成する。当該包囲領域には、固定領域が形成される。固定手段3,4,7A,7B,7C,7Dをフレーム5に接続させることによって、完璧な剛構造を形成することができる。鋳物の代用品として、発泡性のフォームを使用してもよい。
誘導部13は、所定の位置にある剛構造を用いて患者をスキャンした後に製造することができる。その結果、軟部組織の厚い層によって覆われた身体部分内または身体部分上で誘導が行われなければならないにも拘らず、剛構造(例えば、フレーム)は、機能的な誘導部13の明確な配置のための基準として働く。剛構造(例えば、フレーム部)を患者の軟部組織領域の周りに配置するための手段の少なくとも1つは、特定の外科的介入に特有であり、固定された無線不透過性の構成部材を限られた数で形成したものである。例えば、手術のコンピュータ支援計画のためにスキャン方法としてCTが使用されるとき、一部または全部がバリウムと均一に混合されたポリウレタン発泡部材によって、外科用ガイド1を製造し得る。剛構造は、整形外科のギプスのように取り付けられ、スキャン中に患者は心地よく身につけていることができる。ポリウレタン発泡部材は、患者固有(すなわち、患者の身体の一部分のメス型形状を有する)の配置部または固定部、および誘導部によって選択的に置き換えられてもよい。当該配置部または固定部、および誘導部は、手術中とスキャン中との間で身体の関連部分をまったく同一の位置に配置するために、構造に剛性を与える。これによって、医療画像に基づく計画を実際の手術中に支障なく再現させることができる。
誘導部13は、穿孔または挿入の方向および任意の深さを規定する孔、または線形または非線形の切開を可能にするスロット等、非常に簡素な部材であり得る。あるいは、いくつかの制限された方向への動きを可能にするより複雑なシステムでもあり得る。また、誘導部は、上述した剛構造に位置する安定した基準を発見する完璧な誘導システムであり得る。場合によっては、機能的な誘導部は、電子的外科誘導システムと接続されていてもよいし、電子的外科誘導システムの基準であってもよい。
本発明の他の実施形態において、第1および/または第2および/または第3の面14A,12、14Bは、患者の医療画像(例えば、セグメンテーション等によって面が生成され得る光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)から、付加製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって直接生成してもよい。そのため、第1および/または第2および/または第3の面14A,12,14Bは、患者固有の面である(すなわち、患者の身体の一部分のメス型形状を有している)。このようにして、第1および/または第2および/または第3の面14A,12,14Bは、身体の関連部分に合う(すなわち、これらの面は正確に一致する)。本実施形態において、患者は外科用、治療用、または診断用の完成した道具(例えば、外科用のガイドフレーム)を、その後の外科行為、治療行為、または診断行為のために身につける。
また、フレーム5および誘導部13も、患者の医療画像(例えば、光学画像、MRI画像、PETスキャン画像、CTスキャン画像、または超音波画像等)をガイドとして使用する付加的製造方式または積層造形法(例えば、ラピッドプロトタイピング製造技術)によって生成され得る。例えば、剛構造(例えば、フレーム部の形状をしたもの)は、付加的製造技術または積層造形技術(例えば、ラピッドプロトタイピング、または他の付加的製造技術)、もしくは周知のCNC技術を用いて製造され得る。
任意に、ネガティブトレランスまたは緩衝部材が、剛構造の部材として設けられていることができる。これらの対策は、患者の皮膚、特に治療用、診断用、または外科用の道具(例えば、外科用誘導システム)全体の異なる構成部材が結合している領域を締め付けたり、圧迫したりしないように講じられている。
本発明は、本発明の実施形態に係るガイドの一部または全部を、画像に基づいた技術で製造することができるすべての実施形態を含むものである。光学装置、CTスキャン装置、MRI装置、PET装置、X線装置、超音波画像装置等のスキャナは、関連形状(例えば、関連する身体部分をスキャニングすることによって得られた1つ以上の患者固有の面12,14)のデジタル3D形状を生成するために用いられ得る。画像は、ポイントクラウド、三角形によって構成される硬い表面、または3Dジオメトリを記録および記憶するための他のフォーマットをなしていてもよい。所望のジオメトリを得るための別の方法は、手足等の身体部分のギブスを手動で製造し、当該ギブスの形状を最適な技術(例えば、スキャニング等)によって捉える方法である。あるいは、ギブスから作られた陽画をスキャンしてもよい。
特定される身体部分の形状は、コンピュータプログラムにデジタルインポートし、CAD/CAM技術分野で知られているアルゴリズムを用いて変換して、関連表面の3Dコンピュータモデルを製造してもよい。Materialise N.V.社製(ルーヴェン;ベルギー)の3−matic(商標)等のコンピュータプログラムを、3Dモデルを生成するのに用いてもよい。このジオメトリデータは、コンピュータプログラムですぐに用いてもよいし、デジタルファイル内に記憶してもよい。
一度、患者固有の表面(例えば、部材12,14)の3Dモデルが生成されると、当該3Dモデルを手動、半自動的、または自動的に処理して、関連ガイドの3Dモデルを設計してもよい。これらの処理は、1つ以上の以下のプロセスを含んでいてもよいが、これらに限定されるわけではない。
1.特定の軸方向にジオメトリを縮小または拡大する。
2.ジオメトリに対して、部分的に厚さが変化し得る厚みを与える。
3.上記の厚みの中に中空の領域を作る。
4.局所的に昇降させる等して、特定の部分に新たな表面形状を与える。
5.データベースシステム(E)から所定の3D部材を加える。
6.最適な形状に形成された介入を統合する。
7.デバイスが設計された人物に対してデバイスを固定するためのストラップまたは他の手段を取り付けるための取り付け具を加える。
8.孔または他の部材を加える。
これらの処理を行う際には、Materialise N.V.社製(ルーヴェン;ベルギー)の3−matic(商標)等のコンピュータプログラムを用いることが好ましい。
1つ以上の関連組織の3Dモデルのデータベースライブラリ、あるいはそれらを数学的に表現したものを用いて、デバイス(例えば、剛構造5または誘導部13)の3Dモデルに少なくとも1つの機能的な構造を追加してもよい。ライブラリ中の部材は、当該部材が有する所定の特性(例えば、物理的な寸法、外観、または機械的特性等)に基づいて、データベースから手動または自動的に選択し得る。ライブラリにおいて上記のように追加可能な構造すべてに関して、所望または期待の機械的特徴または性能が得られるのであれば、その寸法および値はいかなる局面から測定してもよい。それらに相当する機能および性能を所望なときにユーザが自動的または手動で読み出し、デザインソフトウェアを用いて3Dデザインに組み込むことができるように、当該機能および性能を上記のデータベースに格納しておくことが好ましい。特定の構造をライブラリから読み出しもよいし、ユーザが特定の位置および効果を選択するために、特定の性能パラメータと一致するすべての構造を読み出してもよい。デバイス固有の特性を一定範囲得るために、1つ以上の構造をライブラリシステムから選択してもよい。
図11は、コンピュータシステムを示す概略図である。当該コンピュータシステムは、Materialise N.V.社製(ルーヴェン;ベルギー)の3−matic(商標)等のコンピュータプログラムを含む本発明に係る方法およびシステムに適用することができる。コンピュータ150は、ビデオ表示端末装置159、キーボード155等のデータ出力手段、およびマウス156等のグラフィックユーザインタフェース表示手段を含み得る。コンピュータ150は、UNIX(登録商標)ワークステーションまたはパーソナルコンピュータ等の多目的コンピュータとして実行してもよい。
コンピュータ150は、従来のマイクロプロセッサ(例えば、Intel社製(米国)のPentium(登録商標)Prosecessor)等の中央処理装置(CPU)151、およびバスシステム154を介して相互接続されている他の多くのユニットを含んでいる。バスシステム154は、最適なバスシステムであればいかなるものでもよく、図11は単なる概略である。コンピュータ150は、少なくとも1つの記憶装置を含んでいる。上記の記憶装置には、RAM(Random-access memory)およびROM(Read-only memory)等、当業者に周知の種々の記憶装置、およびハードディスク等、当業者に周知の不揮発性の読み取り/書き込み記憶装置が含まれる。例えば、コンピュータ150はさらにRAM152およびROM153を含んでいてもよく、さらにはビデオ表示端末装置159をバスシステム154に接続するために表示アダプタ1512、および周辺機器(例えば、ディスクおよびテープのドライブ158)をバスシステム154に接続するための入力/出力(I/O)アダプタ1511(任意)を含んでいてもよい。ビデオ表示端末装置159は、コンピュータ150の視覚的な出力手段となり得る。当該ビデオ表示端末装置159は、コンピュータハードウェアの分野において周知のCRT型ビデオ表示装置等、最適な表示装置であればいかなるものであってもよい。しかし、デスクトップコンピュータ、ポータブルまたはノート型コンピュータの場合は、ビデオ表示装置端末159は、液晶型またはガスプラズマ型フラットパネルディスプレイに置き換えることができる。コンピュータ150は、キーボード155、マウス156、およびスピーカ157(任意)を接続するためのユーザインタフェースアダプタ1510をさらに含んでいてもよい。生成する目的物の3Dを表す関連データは、プロセッサが本発明に係る方法を実行した後、キーボード155を用いて直接コンピュータに入力してもよいし、部材158等の記憶装置から直接コンピュータに入力してもよい。上記の方法を実行した結果は、コンピュータ150から提供された情報に基づいてテンプレートを作成するために、さらなる近隣または遠方位置(例えば、CAD/CAM処理機能)に送られてもよい。
さらにCAD/CAM製造ユニット1516は、コンピュータ150をインターネット、イントラネット、ローカルまたはワイドエリアネットワーク(LANまたはWAN)、またはCANに接続するバス154に、通信アダプタ1517を介して接続されていてもよい。製造ユニット1516は、出力値またはディスクリプタファイルを、本発明に係る支援設計のためのコンピュータプログラムを実行しているコンピュータ150から直接受け取ってもよいし、このようなコンピュータ150の出力から生成された値または記述ファイルを受け取ってもよい。あるいは、ユニット1516は、ディスケット、交換可能ハードディスク、CD−ROMまたはDVD−ROM等の光学記憶装置、磁気テープ、あるいはこれらに類するもの等、最適な信号記憶媒体から関連設計データを取得してもよい。
機械読み取り可能な媒体に属しており、コンピュータ150の動作を命令するためのグラフィカルユーザインタフェースを、コンピュータ150はさらに含んでいる。RAM(Random-access memory)152、ROM(Read-only memory)153、磁気ディスケット、磁気テープ、または光学ディスク(後者3つはディスクおよびテープのドライブ158内に格納されている)等、最適な機械読み取り可能な媒体であれば、いかなる媒体にグラフィカルユーザインタフェースが保持されていてもよい。最適なオペレーティングシステムおよび付属のグラフィカルインタフェース(例えば、Microsoft Windows(登録商標)、Linux(登録商標))であれば、いかなるものがCPU151を命令してもよい。さらにコンピュータ150は、コンピュータ記憶装置1516に属する制御プログラム1517を含んでいる。制御プログラム1517は、CPU151上で実行されたときに、コンピュータ150に本発明に係る方法のいずれかに対応する動作を実行させるための指示を含んでいる。
図11に示したハードウェアは、特定のアプリケーションによっては異なり得ることは当業者とって自明である。例えば、光学ディスク媒体、オーディオアダプタ、あるいはコンピュータハードウェアの分野で周知のチッププログラミング装置(PALまたはEPROMプログラミング装置等)等の他の周辺機器を追加して用いてもよいし、上述したハードウェアの変わりに用いてもよい。
図11に示した例では、本発明の方法を実行するためのコンピュータプログラムは、最適な記憶装置であれば、いかなる記憶装置に属していてもよい。しかし、本発明のメカニズムが種々の形態のコンピュータプログラムで実行可能であることが当業者にとって自明であり、かつ上記の実行を実際に実現するために用いる信号ベアリング媒体の具体的なタイプに関係なく本発明は同等に供給することが重要である。コンピュータ読み取り可能信号ベアリング媒体の例として、記録可能なタイプの媒体(例えば、フロッピー(登録商標)ディスクおよびCD−ROM)、および通信型の媒体(例えば、デジタルおよびアナログ通信リンク)等が挙げられる。
したがって、本発明は、最適なコンピュータ装置上で実行されたとき、本発明のいずれかの方法を実行するソフトウェアプロダクトをさらに含んでいる。最適なソフトウェアは、C言語等の最適な高級言語でプログラミングし、標的のコンピュータプロセッサの最適なコンパイラでコンパイルすることによって、得ることができる。
面および当該面のサポートが設計され、当該面(田負えば、面12,14)が身体部分のメス型形状となったため、例えば好適な一実施形態においては、上記の面を付加的製造技術で製造してもよい。付加的製造方式(AM)は、目的物の三次元(3−D)コンピュータ支援設計(CAD)を用いて、当該目的物の縮尺模型を短時間で製造するための技術グループに属させることができる。図11のCAD/CAM製造ユニット1516は、本発明に係る実施形態のいずれかを構成するために、付加的製造技術に適合してもよい。現在では、ステレオリソグラフィ(SLA)、選択的レーザ焼結(SLS)、熱溶解積層法(FDM)、およびホイルベース技術等、多数の付加的製造方式が可能である。
最も一般的なAM技術であるステレオリソグラフィでは、目的物の層を同時に形成するために、透明感光性ポリマである「樹脂」を大量に利用している。各層には、電磁波(例えば、コンピュータで制御された1つ以上のレーザビーム)によって、製造する目的物の二次元の断面によって規定される特定のパターンを、透明樹脂の表面にトレースする。電磁波への暴露によって、樹脂上にトレースされたパターンが硬化または固化し、直下の層に付着する。膜を重合させた後、基板は単層の厚さまで減少し、次の層にパターンがトレースされ、1つ前の層に付着する。このプロセスによって、完璧な3−Dの目的物が形成される。
選択レーザシンタリング(SLS)は、強力なレーザあるいは他の集束した熱源を用いて、プラスチック、金属、またはセラミック粉を焼結または溶接して大きな塊を作って、製造する3次元の目的物を製造する。
融解堆積モデリング(FDM)、およびそれに関連した技術は、固体材料が液体状態に変化する一時的な変化(通常加熱に由来するもの)を利用する。材料は、制御された方法で押出ノズル内に導入され、例えば米国特許第5141680号明細書に記載されているように、所望の位置に堆積される。
ホイルベース技術では、接着または光重合または他の技術によって複数の膜を互いに固定しており、これらの複数の膜または重合物から目的物を切り取る。このような技術は、例えば米国特許第5192539号明細書に記載されている。
通常、AM技術は製造する3−Dの目的物のデジタル表現から始まる。一般的に、デジタルは一群の断面層(重ねると全体で目的物をなすもの)に切断される。AM装置では、このデータを用いて、各層を積み上げて目的物を組み立てる。3−Dの目的物の各層のデータを表す断面データは、コンピュータシステム、およびコンピュータ支援設計および製造(CAD/CAM)ソフトウェアによって、生成することができる。これらの技術では、目的物を通常層ごとに形成していく点が共通の特徴点である。
選択レーザシンタリング(SLS)装置は、身体部分(およびそのサポート)のメス型形状を有する表面をコンピュータモデルから製造する際に用いるのが特に好ましい。しかし、ステレオリソグラフィ(SLA)、融解堆積モデリング(FDM)、またはフライス等を含む、種々のタイプの付加的製造および工具をこれらの表面およびサポートを正確に製造するために用いることができるのを理解されたい。なお、付加的製造および工具は、上述したものに限定されるわけではない。
このような表面のサポートは、異なる材料で製造してもよいが、人体との生体適合性がある材料のみを考慮することが好ましい。AM技術としてSLSを用いる場合、表面のサポートは、EOS(ミュンヘン;ドイツ)社製、または、3DシステムのDuraform PA社製(南カロライナ州;米国)、によって供給されるPA2200等のポリアミド、あるいは当業者にとって周知の他の材料を用いて製造することができる。
好適な実施形態を参照して、本発明を図示し、説明したが、当業者であれば本発明の範囲および精神を逸脱せずに、形態および内容に対して種々の変更または改良を加えることができることを理解されたい。
機械読み取り可能な媒体に属しており、コンピュータ150の動作を命令するためのグラフィカルユーザインタフェースを、コンピュータ150はさらに含んでいる。RAM(Random-access memory)152、ROM(Read-only memory)153、磁気ディスケット、磁気テープ、または光学ディスク(後者3つはディスクおよびテープのドライブ158内に格納されている)等、最適な機械読み取り可能な媒体であれば、いかなる媒体にグラフィカルユーザインタフェースが保持されていてもよい。最適なオペレーティングシステムおよび付属のグラフィカルインタフェース(例えば、Microsoft Windows(登録商標)、Linux(登録商標))であれば、いかなるものがCPU151を命令してもよい。さらにコンピュータ150は、コンピュータ記憶装置2516に属する制御プログラム2517を含んでいる。制御プログラム2517は、CPU151上で実行されたときに、コンピュータ150に本発明に係る方法のいずれかに対応する動作を実行させるための指示を含んでいる。