JP2013536660A - 位置センサシステムによる無線遠隔制御 - Google Patents
位置センサシステムによる無線遠隔制御 Download PDFInfo
- Publication number
- JP2013536660A JP2013536660A JP2013526321A JP2013526321A JP2013536660A JP 2013536660 A JP2013536660 A JP 2013536660A JP 2013526321 A JP2013526321 A JP 2013526321A JP 2013526321 A JP2013526321 A JP 2013526321A JP 2013536660 A JP2013536660 A JP 2013536660A
- Authority
- JP
- Japan
- Prior art keywords
- machine
- wireless remote
- motion
- handheld unit
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C2201/00—Transmission systems of control signals via wireless link
- G08C2201/30—User interface
- G08C2201/32—Remote control based on movements, attitude of remote control device
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C2201/00—Transmission systems of control signals via wireless link
- G08C2201/50—Receiving or transmitting feedback, e.g. replies, status updates, acknowledgements, from the controlled devices
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Selective Calling Equipment (AREA)
- Telephonic Communication Services (AREA)
- Toys (AREA)
Abstract
Description
無線遠隔制御システムのハンドヘルドユニットにおいてユーザによって発行された制御コマンドを、ハンドヘルドユニットの送信機からマシンに、特に関連する受信機に送信するステップと、
少なくとも1つの傾斜軸またはピッチ軸の周りの空中におけるハンドヘルドユニットの動きを検出するステップであり、検出された動きが動き制御モードにおいてマシンに通信される制御コマンドに変換される、ステップとを含み、
ハンドヘルドユニットでのユーザ入力によって動き制御モードが起動され、動き制御モードを起動させると、空中におけるハンドヘルドユニットの現在の姿勢が現在の基準姿勢として検出され、その結果、この現在の基準姿勢に対する動きを検出することができ、制御コマンドとしてマシンに通信することができることが本発明によって提案される。
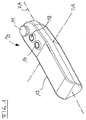
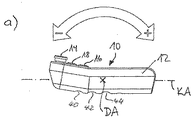
12 ハウジング
14 ジョイスティック
16 制御ボタン
18 制御ボタン
40 下部凹型グリップ
42 下部凹型グリップ
44 下部凹型グリップ
Claims (17)
- 移動可能なマシン部分のための少なくとも1つのマシン駆動装置を含むマシンの無線遠隔制御システムであって、前記無線遠隔制御システムによってマシン駆動装置を制御することができ、
前記マシンに割り当てられた無線受信機と、
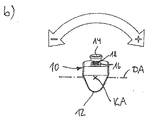
制御ユニット、送信機、および少なくとも1つの動きセンサを含むハンドヘルドユニット(10)とを含み、
前記制御ユニットが、ユーザによって発行された制御コマンドを前記送信機に通信し、前記送信機に、前記制御コマンドを前記受信機に送信させるように構成され、
動き制御モードにおいて、前記検出された動きを、前記制御ユニットによって、送信機と受信機との間の無線送信によって前記マシンに通信することができる制御コマンドに変換することができるよう、少なくとも1つの傾斜軸またはピッチ軸(KA、DA)の周りの空中における前記ハンドヘルドユニット(10)の動きを前記動きセンサによって検出することができ、
前記動き制御モードを、前記ハンドヘルドユニット(10)でユーザ入力によって起動することができる、無線遠隔制御システムにおいて、
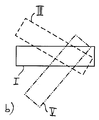
前記制御ユニットが、前記動き制御モードを起動させると、空中における前記ハンドヘルドユニット(10)の現在の姿勢(I)が現在の基準姿勢(I)として検出され、その結果、この現在の基準姿勢(I)に対する動きを前記動きセンサによって検出することができ、制御コマンドとして前記制御ユニットによって前記マシンに通信することができるようにも構成されることを特徴とする無線遠隔制御システム。 - 前記動き制御モードを起動させると、空中における前記ハンドヘルドユニット(10)の前記現在の姿勢(IV)が検出され、所定の基準姿勢(I)と比較されるように、また前記無線遠隔制御システムが少なくとも前記所定の基準姿勢(I)にほぼ近くなる(II、II')までは、検出された動きを制御コマンドとして前記マシンに通信することができず、前記所定の基準姿勢に対する動きが制御コマンドを生成するために検出されるように、前記無線遠隔制御システムがさらに構成されることを特徴とする請求項1のプリアンブルに記載の無線遠隔制御システム。
- 前記受信機が、フィードバック送信機を含み、制御コマンドを受信すると、フィードバック情報を送信するために、前記フィードバック送信機を起動させるように構成され、前記ハンドヘルドユニットが、前記フィードバック情報を受信するように構成され、前記制御ユニットに接続されるフィードバック受信機を含むことを特徴とする請求項1または2に記載の無線遠隔制御システム。
- 前記ハンドヘルドユニットが、前記制御ユニットによって制御され、前記フィードバック送信機からのフィードバック信号の前記受信に従って前記無線遠隔制御システムからの操作機能情報を示すために使用することができる、音響および/または光学および/または触覚表示デバイスを含むことを特徴とする請求項3に記載の無線遠隔制御システム。
- その瞬間の前記移動可能なマシン部分の前記実際の位置についての、および/または前記部分の動きの前記状態についてのデータを取得するセンサデバイス、およびこのセンサデバイスから前記データをフィードバック情報として送信する送信機が前記マシンに設けられ、前記ハンドヘルドユニットが、前記フィードバック情報を受信するように構成され、前記制御デバイスに接続されたフィードバック受信機を含むことを特徴とする請求項1から4のいずれかに記載の無線遠隔制御システム。
- 前記制御ユニットが、前記受信されたフィードバック情報に従って前記マシンのための制御コマンドを修正するように構成されることを特徴とする請求項3または5に記載の無線遠隔制御システム。
- 前記ハンドヘルドユニットが、前記制御ユニットによって制御され、その瞬間の前記実際の位置、および/または前記ハンドヘルドユニットの前記瞬間的な姿勢によって定義される設定点位置からの前記実際の位置の現在の偏差、および/または前記移動可能なマシン部分の動きの速度を表す光学および/または音響および/または触覚表示デバイスを有することを特徴とする請求項5または6に記載の無線遠隔制御システム。
- 前記ハンドヘルドユニット(10)に割り当てられた少なくとも1つの出力手段を含み、前記出力手段が、前記ハンドヘルドユニットの検出された動きに応答して、前記ハンドヘルドユニットで、前記ユーザが知覚可能な少なくとも1つの出力、特に、光学および/または音響および/または触覚信号を生成するように構成されることを特徴とする請求項1から7のいずれかに記載の無線遠隔制御システム。
- 前記出力手段が、前記ユーザが知覚可能な前記出力が前記動きセンサによって出力された前記信号に基づいて生成されるように構成されることを特徴とする請求項8に記載の無線遠隔制御システム。
- 前記出力手段が、前記ユーザが知覚可能な前記出力が前記動きセンサによって出力された何らかの信号強度に達することに基づいて段階的に生成されるように構成されることを特徴とする請求項9に記載の無線遠隔制御システム。
- 前記出力手段が、前記ユーザが知覚可能な前記出力が前記動きセンサによって出力された前記信号強度に比例するように生成されるように構成されることを特徴とすることを特徴とする請求項10に記載の無線遠隔制御システム。
- 前記制御ユニットが、関連する水平回転軸または傾斜軸の周りの最大約-45°から+45°、特に-30°から+30°の回転または傾斜動作範囲で、前記動きセンサまたは別の動きセンサによって検出された動きが、前記マシンのための制御コマンドに変換されるように構成されることを特徴とする請求項1から11のいずれかに記載の無線遠隔制御システム。
- 前記出力手段が、前記最大の回転または傾斜運動に近づいている、および/または前記回転または傾斜動作範囲から離れていることを前記ユーザが知覚可能な適切な出力によって示すように構成されることを特徴とする請求項12および請求項8から11のいずれかに記載の無線遠隔制御システム。
- 前記制御ユニットが、前記回転または傾斜動作範囲から離れると、検出された動きの結果として、制御コマンドがそれ以上生成されないように構成されることを特徴とする請求項12または13に記載の無線遠隔制御システム。
- 移動可能なマシン部分のための少なくとも1つのマシン駆動装置を有するマシンの無線遠隔制御システムのための操作方法であって、前記無線遠隔制御システムによってマシン駆動装置を制御することができ、
前記無線遠隔制御システムのハンドヘルドユニット(10)においてユーザによって発行された制御コマンドを、前記ハンドヘルドユニットの送信機から前記マシンに、特に関連する受信機に送信するステップと、
少なくとも1つの傾斜軸またはピッチ軸(KA、DA)の周りの空中における前記ハンドヘルドユニット(10)の動きを検出するステップであり、前記検出された動きが動き制御モードにおいて前記マシンに通信される制御コマンドに変換されるステップとを含み、
前記ハンドヘルドユニット(10)でのユーザ入力によって前記動き制御モードが起動される(20)、操作方法において、
前記動き制御モードを起動させる(20)と、空中における前記ハンドヘルドユニットの現在の姿勢が現在の基準姿勢として検出され(22)、その結果、この現在の基準姿勢に対する動きを検出する(24)ことができ、制御コマンドとして前記マシンに通信することができる(30)ことを特徴とする操作方法。 - 前記動き制御モードを起動させると、空中における前記ハンドヘルドユニットの前記現在の姿勢が検出され、所定の基準姿勢と比較され、前記ハンドヘルドユニットが少なくとも前記所定の基準姿勢にほぼ近くなるまでは、検出された動きを制御コマンドとして前記マシンに通信することができず、前記所定の基準姿勢に対する動きが制御コマンドを生成するために検出されることを特徴とする請求項15のプリアンブルに記載の操作方法。
- 検出された動きに応答して、前記ユーザが知覚可能な少なくとも1つの出力、特に光学および/または音響および/または触覚信号が前記ハンドヘルドユニットで生成されることを特徴とする請求項15または16に記載の操作方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2010/062706 WO2012028175A1 (de) | 2010-08-31 | 2010-08-31 | Funkfernsteuerung mit lagesensorik |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013536660A true JP2013536660A (ja) | 2013-09-19 |
| JP2013536660A5 JP2013536660A5 (ja) | 2014-02-27 |
Family
ID=44166489
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013526321A Pending JP2013536660A (ja) | 2010-08-31 | 2010-08-31 | 位置センサシステムによる無線遠隔制御 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8866597B2 (ja) |
| EP (1) | EP2612308B1 (ja) |
| JP (1) | JP2013536660A (ja) |
| CN (1) | CN103069463A (ja) |
| DK (1) | DK2612308T3 (ja) |
| ES (1) | ES2624862T3 (ja) |
| PL (1) | PL2612308T3 (ja) |
| RU (1) | RU2534934C2 (ja) |
| WO (1) | WO2012028175A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018037699A1 (ja) * | 2016-08-23 | 2018-03-01 | ソニー株式会社 | 制御システム、制御装置、及び制御方法 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130293362A1 (en) * | 2012-05-03 | 2013-11-07 | The Methodist Hospital Research Institute | Multi-degrees-of-freedom hand controller |
| EP2813910A1 (de) * | 2013-06-10 | 2014-12-17 | Siemens Aktiengesellschaft | Bedienhandgerät mit kombinierter Signalauswertung |
| CN104639966A (zh) * | 2015-01-29 | 2015-05-20 | 小米科技有限责任公司 | 遥控方法及装置 |
| CN105678990A (zh) * | 2015-12-31 | 2016-06-15 | 赵旭 | 一种遥控器及其检测、控制方法 |
| JP1587435S (ja) * | 2016-05-10 | 2017-10-02 | ||
| EP3279881A1 (de) * | 2016-08-05 | 2018-02-07 | Alexander Hakenjos | Fernbedienung und verfahren zu deren kontrolle |
| US10664002B2 (en) | 2016-10-27 | 2020-05-26 | Fluidity Technologies Inc. | Multi-degrees-of-freedom hand held controller |
| US10331233B2 (en) | 2016-10-27 | 2019-06-25 | Fluidity Technologies, Inc. | Camera and sensor controls for remotely operated vehicles and virtual environments |
| US10324487B2 (en) | 2016-10-27 | 2019-06-18 | Fluidity Technologies, Inc. | Multi-axis gimbal mounting for controller providing tactile feedback for the null command |
| US10520973B2 (en) | 2016-10-27 | 2019-12-31 | Fluidity Technologies, Inc. | Dynamically balanced multi-degrees-of-freedom hand controller |
| US10331232B2 (en) | 2016-10-27 | 2019-06-25 | Fluidity Technologies, Inc. | Controller with situational awareness display |
| US10198086B2 (en) | 2016-10-27 | 2019-02-05 | Fluidity Technologies, Inc. | Dynamically balanced, multi-degrees-of-freedom hand controller |
| CN106683384B (zh) * | 2017-02-28 | 2023-11-24 | 国网山东省电力公司烟台供电公司 | 智能遥控器、家用电器及方法 |
| EP3396478B1 (en) | 2017-04-28 | 2023-06-14 | Deere & Company | Apparatus, method and computer programme for controlling a machine |
| WO2019084506A1 (en) | 2017-10-27 | 2019-05-02 | Fluidity Technologies, Inc. | CONTROL DEVICE EQUIPPED WITH A DISPLAY DEVICE FOR KNOWING THE SITUATION |
| CN111566579A (zh) | 2017-10-27 | 2020-08-21 | 流体技术股份有限公司 | 用于远程操作的交通工具和虚拟环境的相机和传感器控件 |
| EP3701216A4 (en) | 2017-10-27 | 2021-09-22 | Fluidity Technologies, Inc. | CARDAN SUSPENSION WITH MULTIPLE AXES FOR A CONTROLLER TO PROVIDE TACTILE FEEDBACK FOR THE ZERO COMMAND |
| EP3771458B1 (en) * | 2019-07-29 | 2026-05-06 | Baxter Medical Systems GmbH + Co. KG | Remote control for a medical apparatus, system of the remote control and the medical apparatus, and method for operating the medical apparatus |
| US11908574B2 (en) * | 2019-07-29 | 2024-02-20 | Trumpf Medizin Systeme Gmbh + Co. Kg | Remote control for a medical apparatus, system of the remote control and the medical apparatus and method for operating the medical apparatus |
| US11599107B2 (en) | 2019-12-09 | 2023-03-07 | Fluidity Technologies Inc. | Apparatus, methods and systems for remote or onboard control of flights |
| EP4072658B1 (de) * | 2019-12-11 | 2023-11-08 | Ged Gesellschaft für Elektronik und Design mbH | Vorrichtung zur ertüchtigung des gleichgewichtssinns |
| CN112991705B (zh) * | 2019-12-12 | 2024-09-10 | 无疆(武汉)技术有限公司 | 一种手握式遥控器 |
| US11614766B2 (en) * | 2020-04-09 | 2023-03-28 | Caterpillar Inc. | Machine joystick with comfort and accessibility features |
| IT202000028481A1 (it) * | 2020-11-26 | 2022-05-26 | Aisa Di Zanette Dino | Dispositivo di comando a distanza portatile preferibilmente per uso in ambito domestico |
| JP2022141177A (ja) * | 2021-03-15 | 2022-09-29 | オムロン株式会社 | ウェアラブル機器 |
| US11696633B1 (en) | 2022-04-26 | 2023-07-11 | Fluidity Technologies Inc. | System and methods for controlling motion of a target object and providing discrete, directional tactile feedback |
| US11662835B1 (en) | 2022-04-26 | 2023-05-30 | Fluidity Technologies Inc. | System and methods for controlling motion of a target object and providing discrete, directional tactile feedback |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11262073A (ja) * | 1998-03-13 | 1999-09-24 | Mitsubishi Electric Corp | リモコンシステム |
| JP2003111171A (ja) * | 2001-09-26 | 2003-04-11 | Yamaha Corp | リモコン装置 |
| JP2004173003A (ja) * | 2002-11-20 | 2004-06-17 | Toshiba Corp | 放送受信装置とコード信号出力装置及びその制御方法 |
| JP2004236034A (ja) * | 2003-01-30 | 2004-08-19 | Nippon Hoso Kyokai <Nhk> | リモコン信号送信装置 |
| JP2006072992A (ja) * | 2004-08-16 | 2006-03-16 | Mitsubishi Electric Research Laboratories Inc | 家電機器のネットワークの1つの共通グラフィカルユーザインタフェース及び家電機器ネットワーク |
| JP2007531113A (ja) * | 2004-03-23 | 2007-11-01 | 富士通株式会社 | 携帯装置の傾斜及び並進運動成分の識別 |
| JP2009189727A (ja) * | 2008-02-18 | 2009-08-27 | Kyushu Hitachi Maxell Ltd | マッサージ機 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5444462A (en) * | 1991-12-16 | 1995-08-22 | Wambach; Mark L. | Computer mouse glove with remote communication |
| US5598187A (en) * | 1993-05-13 | 1997-01-28 | Kabushiki Kaisha Toshiba | Spatial motion pattern input system and input method |
| US6346891B1 (en) * | 1998-08-31 | 2002-02-12 | Microsoft Corporation | Remote control system with handling sensor in remote control device |
| SE521051C2 (sv) * | 2001-11-16 | 2003-09-23 | Volvo Penta Ab | Fjärrmanövreringssystem för ett fordon. |
| JP2004120577A (ja) * | 2002-09-27 | 2004-04-15 | Alps Electric Co Ltd | 機器制御装置 |
| DE102004009561A1 (de) * | 2003-02-27 | 2004-11-11 | Karlheinz Lederer | Fernbedienungssystem und Verfahren zum Fernbedienen |
| US7173604B2 (en) * | 2004-03-23 | 2007-02-06 | Fujitsu Limited | Gesture identification of controlled devices |
| RU55760U1 (ru) * | 2006-03-22 | 2006-08-27 | Общество с ограниченной ответственностью "Научно-производственное предприятие "КОМПЛЕКСЫ и СИСТЕМЫ" (ООО НПП "КОМПЛЕКСЫ и СИСТЕМЫ") | Система дистанционного управления грузоподъемными кранами (сду) |
| US20080150749A1 (en) * | 2006-12-21 | 2008-06-26 | Tai-Hung Lin | Wireless control system for controlling linear actuators |
| JP4940118B2 (ja) | 2007-12-10 | 2012-05-30 | 株式会社キトー | 走行クレーンの操作制御装置 |
| JP5011170B2 (ja) | 2008-03-05 | 2012-08-29 | 株式会社キトー | 走行クレーンの操作制御装置、操作制御方法 |
| JP5011169B2 (ja) | 2008-03-05 | 2012-08-29 | 株式会社キトー | 走行クレーンの操作制御装置 |
| US8503932B2 (en) * | 2008-11-14 | 2013-08-06 | Sony Mobile Comminications AB | Portable communication device and remote motion input device |
| JP5348760B2 (ja) * | 2009-05-08 | 2013-11-20 | 本田技研工業株式会社 | 作業機の遠隔操作装置 |
-
2010
- 2010-08-31 US US13/818,148 patent/US8866597B2/en active Active
- 2010-08-31 RU RU2013114302/08A patent/RU2534934C2/ru active
- 2010-08-31 CN CN2010800688473A patent/CN103069463A/zh active Pending
- 2010-08-31 EP EP10757578.9A patent/EP2612308B1/de active Active
- 2010-08-31 PL PL10757578T patent/PL2612308T3/pl unknown
- 2010-08-31 JP JP2013526321A patent/JP2013536660A/ja active Pending
- 2010-08-31 ES ES10757578.9T patent/ES2624862T3/es active Active
- 2010-08-31 DK DK10757578.9T patent/DK2612308T3/en active
- 2010-08-31 WO PCT/EP2010/062706 patent/WO2012028175A1/de not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11262073A (ja) * | 1998-03-13 | 1999-09-24 | Mitsubishi Electric Corp | リモコンシステム |
| JP2003111171A (ja) * | 2001-09-26 | 2003-04-11 | Yamaha Corp | リモコン装置 |
| JP2004173003A (ja) * | 2002-11-20 | 2004-06-17 | Toshiba Corp | 放送受信装置とコード信号出力装置及びその制御方法 |
| JP2004236034A (ja) * | 2003-01-30 | 2004-08-19 | Nippon Hoso Kyokai <Nhk> | リモコン信号送信装置 |
| JP2007531113A (ja) * | 2004-03-23 | 2007-11-01 | 富士通株式会社 | 携帯装置の傾斜及び並進運動成分の識別 |
| JP2006072992A (ja) * | 2004-08-16 | 2006-03-16 | Mitsubishi Electric Research Laboratories Inc | 家電機器のネットワークの1つの共通グラフィカルユーザインタフェース及び家電機器ネットワーク |
| JP2009189727A (ja) * | 2008-02-18 | 2009-08-27 | Kyushu Hitachi Maxell Ltd | マッサージ機 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018037699A1 (ja) * | 2016-08-23 | 2018-03-01 | ソニー株式会社 | 制御システム、制御装置、及び制御方法 |
| JPWO2018037699A1 (ja) * | 2016-08-23 | 2019-06-20 | ソニー株式会社 | 制御システム、制御装置、及び制御方法 |
| US10916123B2 (en) | 2016-08-23 | 2021-02-09 | Sony Corporation | Control system, control apparatus, and control method |
| JP7002453B2 (ja) | 2016-08-23 | 2022-01-20 | ソニーグループ株式会社 | 制御システム、制御装置、及び制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2612308B1 (de) | 2017-04-05 |
| RU2534934C2 (ru) | 2014-12-10 |
| RU2013114302A (ru) | 2014-10-10 |
| WO2012028175A1 (de) | 2012-03-08 |
| DK2612308T3 (en) | 2017-07-31 |
| US8866597B2 (en) | 2014-10-21 |
| PL2612308T3 (pl) | 2017-09-29 |
| CN103069463A (zh) | 2013-04-24 |
| EP2612308A1 (de) | 2013-07-10 |
| US20130147611A1 (en) | 2013-06-13 |
| ES2624862T3 (es) | 2017-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013536660A (ja) | 位置センサシステムによる無線遠隔制御 | |
| JP2013536660A5 (ja) | ||
| US12043351B2 (en) | Method and system for operating a hydrofoil board | |
| US10961086B2 (en) | Assembly of a controller and of a mobile control module | |
| CN105143088B (zh) | 远程控制的起重机 | |
| KR102856293B1 (ko) | 쇼벨 | |
| KR20150068598A (ko) | 전동 보행보조장치 | |
| US20210223781A1 (en) | Systems and Methods for Controlling Mobility Devices | |
| JP7596797B2 (ja) | 産業用リモートコントローラ | |
| CN112424111A (zh) | 通知装置、作业机、以及通知方法 | |
| KR101602930B1 (ko) | 호이스트 제어장치 | |
| KR101459322B1 (ko) | 조작레버의 제한장치 | |
| KR102020374B1 (ko) | 스마트 지팡이 | |
| US20250315044A1 (en) | Remote operator terminal | |
| US20250315042A1 (en) | Remote operator terminal | |
| US20250315043A1 (en) | Remote operator terminal | |
| JP7364999B2 (ja) | ブームの操作システム | |
| CN114495469A (zh) | 车辆的控制方法、装置、电子设备及存储介质 | |
| KR101845847B1 (ko) | 스마트폰을 활용한 항공용 위치제어시스템 | |
| KR102025627B1 (ko) | 전자 수갑 장치 및 이를 포함하는 전자 수갑 시스템 | |
| JP2022080648A (ja) | 産業用リモートコントローラ | |
| JP2011228761A (ja) | リモコン装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130617 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140627 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141201 |