JP2014005803A - 内燃機関の制御装置 - Google Patents
内燃機関の制御装置 Download PDFInfo
- Publication number
- JP2014005803A JP2014005803A JP2012143254A JP2012143254A JP2014005803A JP 2014005803 A JP2014005803 A JP 2014005803A JP 2012143254 A JP2012143254 A JP 2012143254A JP 2012143254 A JP2012143254 A JP 2012143254A JP 2014005803 A JP2014005803 A JP 2014005803A
- Authority
- JP
- Japan
- Prior art keywords
- value
- weight
- learning
- kij
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Electrical Control Of Ignition Timing (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【課題】本発明は、学習マップの各格子点で重みの積算値を適切な範囲で変化させ、学習の応答性と安定性を両立させることを目的とする。
【解決手段】学習マップの重み付け学習制御では、制御パラメータの取得値zkの位置から格子点までの距離が大きいほど重みwkijが減少するように、各格子点の重みwkijを設定する。また、重み積算値Wij(k)は、前回までの重みwkijの合計値Wij(k−1)*忘却係数αkij+重みwkijの式により算出する。パラメータ積算値Vij(k)は、前回までの積(zk*wkij)の合計値Vij(k−1)*忘却係数αkij+積(zk*wkij)の式により算出する。学習値Zij(k)は、Vij(k)/Wij(k)の式により算出する。忘却係数αkijは、所定の重み積算調整係数βに基いて、αkij=1−wkij*βの式により設定する。
【選択図】図6
【解決手段】学習マップの重み付け学習制御では、制御パラメータの取得値zkの位置から格子点までの距離が大きいほど重みwkijが減少するように、各格子点の重みwkijを設定する。また、重み積算値Wij(k)は、前回までの重みwkijの合計値Wij(k−1)*忘却係数αkij+重みwkijの式により算出する。パラメータ積算値Vij(k)は、前回までの積(zk*wkij)の合計値Vij(k−1)*忘却係数αkij+積(zk*wkij)の式により算出する。学習値Zij(k)は、Vij(k)/Wij(k)の式により算出する。忘却係数αkijは、所定の重み積算調整係数βに基いて、αkij=1−wkij*βの式により設定する。
【選択図】図6
Description
本発明は、制御パラメータの学習マップを備えた内燃機関の制御装置に関する。
従来技術として、例えば特許文献1(特開2009−046988号公報)に開示されているように、制御パラメータの学習マップを備えた内燃機関の制御装置が知られている。学習マップの各格子点には、制御パラメータを補正するための学習値がそれぞれ記憶されている。従来技術では、学習すべき制御パラメータを取得した場合に、学習マップ上で当該取得値の周囲に位置する4個の格子点を選択し、これら4個の格子点の学習値を更新する構成としている。この学習制御では、制御パラメータの取得値に重み付けをしてから周囲の格子点の学習値に反映させるが、このときの重み付けは、前記取得値の位置と格子点との距離が近いほど大きくなるように設定される。
上述した従来技術では、制御パラメータの取得値の周囲に位置する4個の学習値に対して、前記取得値に近い格子点ほど重み付けが大きくなるように学習制御を行う構成としている。しかしながら、例えば学習値を更新するのに重みの積算値を利用していると、学習が進行して重みが溜まった場合に、学習値が変化し難くなる。この状態では、経時変化等により制御パラメータの特性が変化しても、学習値が十分に行われないという問題がある。これに対し、過去のデータ(重みの積算履歴)を忘却するように設定することも考えられる。しかし、過去のデータを忘却させると、制御パラメータの取得値から離れた格子点では、学習値が更新されない状態で、重みの積算値が減っていくことになる。このような格子点の近傍で制御パラメータが取得されると、学習値が大きく変化する虞れがある。
本発明は、上述のような課題を解決するためになされたもので、本発明の目的は、学習マップの各格子点で重みの積算値を適切な範囲で変化させ、学習の応答性と安定性を両立させることが可能な内燃機関の制御装置を提供することにある。
第1の発明は、複数の格子点(i,j)を有し、内燃機関の制御に用いる制御パラメータの学習値Zijが前記各格子点にそれぞれ更新可能に記憶された学習マップと、
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記重みの積算履歴を忘却させるために、前記重み積算値Wij(k)及び前記パラメータ積算値Vij(k)を算出するときに前記合計値Wij(k−1),Vij(k−1)にそれぞれ乗算する忘却係数αkijを1>αkij>0の範囲で設定する忘却係数設定手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、を備え、
前記忘却係数設定手段は、個々の格子点の重みwkijと、1>β>0を満たす範囲で所定の値に設定される重み積算調整係数βとに基いて、当該格子点における忘却係数αkijを(αkij=1−wkij*β)の式により設定する構成としたことを特徴とする。
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記重みの積算履歴を忘却させるために、前記重み積算値Wij(k)及び前記パラメータ積算値Vij(k)を算出するときに前記合計値Wij(k−1),Vij(k−1)にそれぞれ乗算する忘却係数αkijを1>αkij>0の範囲で設定する忘却係数設定手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、を備え、
前記忘却係数設定手段は、個々の格子点の重みwkijと、1>β>0を満たす範囲で所定の値に設定される重み積算調整係数βとに基いて、当該格子点における忘却係数αkijを(αkij=1−wkij*β)の式により設定する構成としたことを特徴とする。
第2の発明によると、前記制御パラメータの取得値zkの信頼度が低いほど、重み積算調整係数βを小さく設定する構成としている。
第3の発明によると、前記学習マップは互いに異なる複数の領域を備え、
前記忘却係数設定手段は、前記重み積算調整係数βの値を前記複数の領域毎に切換える構成としている。
前記忘却係数設定手段は、前記重み積算調整係数βの値を前記複数の領域毎に切換える構成としている。
第4の発明によると、前記重み設定手段は、前記制御パラメータの取得値zkの位置からの距離に応じて前記重みwkijが正規分布曲線状に減少するガウス関数である構成としている。
第5の発明によると、前記学習マップは、内燃機関のトルクが最大となる点火時期であるMBTの学習値が前記各格子点にそれぞれ記憶されたMBTマップであり、
筒内圧に基いて算出された燃焼重心が所定の燃焼重心目標値と一致するように、前記MBTマップにより算出した点火時期を補正する手段であって、補正後の点火時期が前記制御パラメータの取得値zkとなる点火時期補正手段と、
内燃機関の運転環境に基いて前記重み積算調整係数βを変更する係数変更手段と、
を備える。
筒内圧に基いて算出された燃焼重心が所定の燃焼重心目標値と一致するように、前記MBTマップにより算出した点火時期を補正する手段であって、補正後の点火時期が前記制御パラメータの取得値zkとなる点火時期補正手段と、
内燃機関の運転環境に基いて前記重み積算調整係数βを変更する係数変更手段と、
を備える。
第6の発明は、複数の格子点(i,j)を有し、内燃機関の制御に用いる制御パラメータの学習値Zijが前記各格子点にそれぞれ更新可能に記憶された学習マップと、
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記各格子点の重み積算値Wij(k)の最大値Wmaxを設定し、前記重み積算手段により算出される前記重み積算値Wij(k)を前記最大値Wmax以下に制限する重み積算値制限手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、を備える。
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記各格子点の重み積算値Wij(k)の最大値Wmaxを設定し、前記重み積算手段により算出される前記重み積算値Wij(k)を前記最大値Wmax以下に制限する重み積算値制限手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、を備える。
第7の発明によると、前記制御パラメータの取得値zkの信頼度が低いほど、前記最大値Wmaxを大きく設定する構成としている。
第8の発明によると、前記学習マップは互いに異なる複数の領域を備え、
前記重み積算値制限手段は、前記最大値Wmaxの値を前記複数の領域毎に切換える構成としている。
前記重み積算値制限手段は、前記最大値Wmaxの値を前記複数の領域毎に切換える構成としている。
第1の発明によれば、忘却係数αkijを、重み積算調整係数β等に基いて、αkij=1−wkij*βの式により設定したので、学習回数が増えた場合でも、重み積算値Wij(k)を特定値(1/β)に収束させることができる。これにより、特定値(1/β)を重み積算値Wij(k)の下限値として機能させ、学習状況等に応じて変化する重み積算値Wij(k)が特定値(1/β)よりも小さくなるのを制限することができる。従って、各格子点で重み積算値Wij(k)を適切な範囲で変化させ、学習の応答性と安定性を両立させることができる。また、重み積算調整係数βを小さくするほど、学習値Zij(k)に対する制御パラメータの取得値zkの反映度を抑制することができる。従って、重み積算調整係数βに基いて、学習速度を適切に調整することができる。
第2の発明によれば、制御パラメータの取得値zkの信頼度が低いほど、重み積算調整係数βを小さく設定することができる。従って、取得した制御パラメータの信頼度や必要性等に応じて重み積算調整係数βを変更することにより、学習値の更新量(速度)を適切に調整することができ、学習制御をより高い精度で実行することができる。
第3の発明によれば、忘却係数設定手段は、学習マップ上の各領域の要求に応じて重み積算調整係数βを適切な値に切換えることができる。これにより、学習マップ全体の学習速度を最適化することができる。
第4の発明によれば、重み設定手段としてガウス関数を用いることにより、制御パラメータの取得値zkの位置からの距離に応じて、重みwkijを滑らかに変化させることができる。従って、学習マップを滑らかにすることができ、学習値Zij(k)の急変等による制御性の悪化を抑制することができる。しかも、ガウス関数の標準偏差σの設定に応じて重みwkijの減少特性を変化させることができ、広い学習領域において学習の速度や効率を容易に調整することができる。
第5の発明によれば、MBTの学習制御を行う場合において、係数変更手段は、内燃機関の運転環境(例えば給油の有無、点火プラグの交換の有無、冷間運転時であるか否か等)に基いて、重み積算調整係数βを変更することができる。これにより、内燃機関の運転環境に応じてMBTの学習速度を適切に調整し、また、誤学習やノイズに対して的確に対処することができる。
第6の発明によれば、重み積算値Wij(k)を最大値Wmax以下に制限したので、学習回数が増えた場合でも、重み積算値Wij(k)が過大となって学習値Zij(k)が更新され難くなるのを防止することができる。これにより、各格子点で重み積算値Wij(k)を適切な範囲で変化させ、学習の応答性と安定性を両立させることができる。また、最大値Wmaxを大きくするほど、学習値Zij(k)に対する制御パラメータの取得値zkの反映度を抑制することができる。これにより、最大値Wmaxに基いて、学習の応答性(学習速度)を適切に調整することができる。
第7の発明によれば、制御パラメータの取得値zkの信頼度が低いほど、最大値Wmaxを大きく設定することができる。従って、取得した制御パラメータの信頼度や必要性等に応じて最大値Wmaxを変更することにより、学習値の更新量(速度)を適切に調整することができ、学習制御をより高い精度で実行することができる。
第8の発明によれば、学習マップ上の各領域の要求に応じて最大値Wmaxを適切な値に切換えることができる。これにより、学習マップ全体の学習速度を最適化することができる。
実施の形態1.
[実施の形態1の構成]
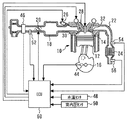
以下、図1乃至図6を参照して、本発明の実施の形態1について説明する。図1は、本発明の実施の形態1のシステム構成を説明するための全体構成図である。本実施の形態のシステムは、内燃機関として多気筒型のエンジン10を備えている。なお、本発明は、単気筒及び多気筒を含む任意の気筒数の内燃機関に適用されるものであり、図1は、エンジン10に搭載された複数気筒のうちの1気筒を例示したものである。
[実施の形態1の構成]
以下、図1乃至図6を参照して、本発明の実施の形態1について説明する。図1は、本発明の実施の形態1のシステム構成を説明するための全体構成図である。本実施の形態のシステムは、内燃機関として多気筒型のエンジン10を備えている。なお、本発明は、単気筒及び多気筒を含む任意の気筒数の内燃機関に適用されるものであり、図1は、エンジン10に搭載された複数気筒のうちの1気筒を例示したものである。
エンジン10の各気筒には、ピストン12により燃焼室14が形成されており、ピストン12はクランク軸16に連結されている。また、エンジン10は、各気筒に吸入空気を吸込む吸気通路18を備えており、吸気通路18には、吸入空気量を調整する電子制御式のスロットルバルブ20が設けられている。一方、エンジン10は、各気筒の排気ガスを排出する排気通路22を備えており、排気通路22には、排気ガスを浄化する三元触媒等の触媒24が設けられている。また、エンジンの各気筒は、吸気ポートに燃料を噴射する燃料噴射弁26と、混合気に点火する点火プラグ28と、吸気ポートを開閉する吸気バルブ30と、排気ポートを開閉する排気バルブ32とを備えている。
次に、本実施の形態のシステムに搭載された制御系統について説明する。本実施の形態のシステムは、エンジン及び車両の運転に必用な各種のセンサが含まれるセンサ系統と、エンジンの運転状態を制御するECU(Engine Control Unit)60とを備えている。まず、センサ系統について述べると、クランク角センサ44は、クランク軸16の回転に同期した信号を出力するもので、エアフローセンサ46は吸入空気量を検出する。また、水温センサ48はエンジン冷却水の水温を検出し、筒内圧センサ50は筒内圧を検出し、吸気温度センサ52は吸入空気の温度(外気温度)を検出する。空燃比センサ54は、排気空燃比を連続的な検出値として検出するもので、触媒24の上流側に配置されている。酸素濃度センサ56は、排気空燃比が理論空燃比に対してリッチとリーンの何れであるかを検出するもので、触媒24の下流側に配置されている。
ECU60は、ROM、RAM、不揮発性メモリ等からなる記憶回路と、入出力ポートとを備えた演算処理装置により構成されている。ECU60の不揮発性メモリには、後述する各種の学習マップが記憶されている。また、ECU60の入力側には、センサ系統の各センサがそれぞれ接続されている。ECU60の出力側には、スロットルバルブ20、燃料噴射弁26、点火プラグ28等のアクチュエータが接続されている。そして、ECU60は、センサ系統により検出したエンジンの運転情報に基いて各アクチュエータを駆動し、運転制御を行う。具体的には、クランク角センサ44の出力に基いて機関回転数とクランク角とを検出し、エアフローセンサ46により吸入空気量を検出する。また、機関回転数と吸入空気量とに基いて機関負荷を算出し、吸入空気量、機関負荷、水温等に基いて燃料噴射量を算出すると共に、クランク角に基いて燃料噴射時期及び点火時期を決定する。そして、燃料噴射時期が到来した時点で燃料噴射弁26を駆動し、点火時期が到来した時点で点火プラグ28を駆動する。これにより、各気筒で混合気を燃焼させ、エンジンを運転する。
[実施の形態1の特徴]
(重み付け学習制御)
一般に、エンジン制御では、各種の制御パラメータの取得値に基いて制御パラメータを学習する学習制御が行われる。なお、本明細書中において、「取得」とは、検出、計測、測定、算出、推定等の意味を含むものとする。本実施の形態では、学習制御として、以下に述べる重み付け学習制御を実行する。ECU60は、重み付け学習制御を行う学習装置を構成しており、複数の格子点を有する学習マップを備えている。なお、本実施の形態では、重み付け学習制御の具体的な内容について説明するものとし、制御パラメータの具体例については、後述する実施の形態5で説明する。
(重み付け学習制御)
一般に、エンジン制御では、各種の制御パラメータの取得値に基いて制御パラメータを学習する学習制御が行われる。なお、本明細書中において、「取得」とは、検出、計測、測定、算出、推定等の意味を含むものとする。本実施の形態では、学習制御として、以下に述べる重み付け学習制御を実行する。ECU60は、重み付け学習制御を行う学習装置を構成しており、複数の格子点を有する学習マップを備えている。なお、本実施の形態では、重み付け学習制御の具体的な内容について説明するものとし、制御パラメータの具体例については、後述する実施の形態5で説明する。
図2は、本発明の実施の形態1において、重み付け学習制御に用いる学習マップの一例を模式的に示す説明図である。この図は、X軸及びY軸に対応する2つの参照パラメータに基いて、1つの学習値が算出される2次元の学習マップを例示している。図2に示す学習マップは、座標i,jが1〜4の範囲で変化する16個の格子点を有している。学習マップの各格子点(i,j)には、制御パラメータの学習値Zijがそれぞれ更新可能に記憶されている。
なお、以下の説明において、添字kが付記される変数値zk、wkij、Wij(k)、Vij(k)、Zij(k)等は、k回目の取得タイミング(演算タイミング)に対応するk番目の値であることを明示する表記であり、添字kが付記されない変数値wij、Wij、Vij、Zij等は、取得タイミングにより区別する必要がない場合の表記である。また、図2は、制御パラメータの1回目及び2回目の取得値z1,z2が全格子点の学習値Zijに反映される様子を矢印により例示したもので、図面を判り易くするために、矢印の一部を省略し、学習値の更新範囲を円により示している。
重み付け学習制御は、基本的に、k回目(k番目)の取得タイミングで取得した制御パラメータの取得値(パラメータ取得値zk)と、後述の重み設定手段により設定された各格子点(i,j)の重みwkijとに基いて、全ての格子点(i,j)の学習値Zij(k)を更新する。この更新処理は、全ての格子点(i,j)において、下記数1乃至数3の式を演算することにより実現される。
[数1]
Wij(k)=Wij(k−1)*αkij+wkij
[数2]
Vij(k)=Vij(k−1)*αkij+zk*wkij
[数3]
Zij(k)=Vij(k)/Wij(k)
Wij(k)=Wij(k−1)*αkij+wkij
[数2]
Vij(k)=Vij(k−1)*αkij+zk*wkij
[数3]
Zij(k)=Vij(k)/Wij(k)
上記式において、重み積算値Wij(k)は、個々の格子点において、初回から前回までの重みwkijの合計値Wij(k−1)に対して、今回(k回目)の重みwkijを加算したもので、初回からk回目までの重みwkijの合計値に対応している。なお、前回までの合計値、即ち、過去の積算値Wij(k−1)には、後述の忘却係数αkijが乗算される。パラメータ積算値Vij(k)は、個々の格子点において、パラメータ取得値zkと重みwkijとの積(zk*wkij)を、初回から前回までの積(zk*wkij)の合計値Vij(k−1)に加算したもので、初回からk回目までの積(zk*wkij)の合計値に対応している。なお、前回までの合計値、即ち、過去の積算値Vij(k−1)には、忘却係数αkijが乗算される。一方、k回目の学習値Zij(k)は、パラメータ積算値Vij(k)を重み積算値Wij(k)で除算することにより算出され、前回の学習値Zij(k−1)が学習値Zij(k)に更新される。重み付け学習制御では、制御パラメータが取得される毎に、全ての格子点で前記数1乃至数3の式が実行される。これにより、各格子点の学習値Zij(k)には、重みwkijが大きいほど、パラメータ取得値zkが大きく反映される。
また、上記数1及び数2の式には、前回(k−1回目)の積算値Wij(k−1)及びVij(k−1)が用いられるが、これらの初期値(k=1のときの値)は、下記数4及び数5の式により定義される。従って、数1乃至数5の式によれば、k番目のパラメータ取得値zkと、重みwkijとに基いて、全ての格子点(i,j)におけるk番目の学習値Zij(k)を算出し、学習マップを更新することができる。
[数4]
Vij(1)=z1*w1ij
[数5]
Wij(1)=w1ij
Vij(1)=z1*w1ij
[数5]
Wij(1)=w1ij
(重みの設定方法)
次に、本実施の形態における重みwkijの設定方法について説明する。k番目のパラメータ取得値zkに対応する各格子点(i,j)の重みwkijは、下記数6の式に示すガウス関数より、1≧wkij≧0を満たすように算出される。ガウス関数は、本実施の形態の重み設定手段を構成するもので、学習マップ上におけるパラメータ取得値zkの位置(基準位置)から格子点(i,j)までの距離が大きいほど、当該格子点(i,j)の重みwkijを減少させるものである。なお、学習マップ上の「位置」とは、パラメータ取得値zkの取得時点における各参照パラメータの組合わせにより定められる。
次に、本実施の形態における重みwkijの設定方法について説明する。k番目のパラメータ取得値zkに対応する各格子点(i,j)の重みwkijは、下記数6の式に示すガウス関数より、1≧wkij≧0を満たすように算出される。ガウス関数は、本実施の形態の重み設定手段を構成するもので、学習マップ上におけるパラメータ取得値zkの位置(基準位置)から格子点(i,j)までの距離が大きいほど、当該格子点(i,j)の重みwkijを減少させるものである。なお、学習マップ上の「位置」とは、パラメータ取得値zkの取得時点における各参照パラメータの組合わせにより定められる。
上記数6の式において、|zk−Zij|は、前記基準位置から格子点(i,j)までのユークリッド距離を示している。図3は、本発明の実施の形態1において、ガウス関数による重みの減少特性を示す特性線図である。ここで、重みの減少特性とは、基準位置からの距離に応じて減少する重みと前記距離との関係を意味している。図3中に実線で示すように、ガウス関数により得られる重みwkijは、格子点が基準位置に近い場合に大きくなり、格子点が基準位置から遠いほど、正規分布曲線状に減少していく。従って、パラメータ取得値zkが学習値Zijに反映される度合い(学習効果)は、格子点が基準位置に近いほど大きくなり、格子点が基準位置から遠くなるにつれて小さくなる。なお、上記重み設定手段とししては、ガウス関数だけでなく、基準位置からの距離に応じて減少する一次関数や三角関数の波形等も利用することができる。
また、上記数6の式に示すσは、任意の値に設定することが可能な標準偏差であり、ガウス関数の減少特性は、標準偏差σに応じて変化する。即ち、重みwkijは、図3中に点線で示すように、標準偏差σが小さいほど、基準位置の近傍に存在するピーク値が大きくなるものの、基準位置から遠くなるにつれて急激に減少する。この結果、標準偏差σが小さい場合には、基準位置の近傍のみで急峻な学習が行われることになり、学習の応答性は高くなるが、学習マップの曲面には凹凸が生じ易くなる。一方、重みwkijは、図3中に一点鎖線で示すように、標準偏差σが大きいほど、ピーク値が小さくなり、基準位置から遠くなるにつれて緩やかに減少する。この結果、標準偏差σが大きい場合には、基準位置の近傍から遠方にかけて学習が広範囲に行われることになり、学習の応答性は相対的に低下するものの、学習マップを滑らかな曲面にすることができる。
(重み付け学習制御の問題点)
上述した重み付け学習制御において、忘却係数αkijを使用しない場合には、学習が進行するにつれて、各格子点の重み積算値Wij(k)が徐々に増加していく(重みwkijが溜まった状態となる)。そして、重みwkijがある程度以上溜まると、前記数1及び数2の式の右辺において、今回の重みwkijに対する過去の積算値Wij(k−1),Vij(k−1)の比率が大きくなり、その結果として学習値Zij(k)が変化し難くなる。この状態では、制御パラメータの特性が経時変化等により変わった場合に、学習制御により対応できない虞れが生じる。このため、本実施の形態では、過去の積算値Wij(k−1),Vij(k−1)に対して忘却係数αkijを乗算し、忘却係数αkijを用いて過去のデータ(重みの積算履歴)を忘却させる構成としている。
上述した重み付け学習制御において、忘却係数αkijを使用しない場合には、学習が進行するにつれて、各格子点の重み積算値Wij(k)が徐々に増加していく(重みwkijが溜まった状態となる)。そして、重みwkijがある程度以上溜まると、前記数1及び数2の式の右辺において、今回の重みwkijに対する過去の積算値Wij(k−1),Vij(k−1)の比率が大きくなり、その結果として学習値Zij(k)が変化し難くなる。この状態では、制御パラメータの特性が経時変化等により変わった場合に、学習制御により対応できない虞れが生じる。このため、本実施の形態では、過去の積算値Wij(k−1),Vij(k−1)に対して忘却係数αkijを乗算し、忘却係数αkijを用いて過去のデータ(重みの積算履歴)を忘却させる構成としている。
(忘却係数)
忘却係数αkijは、個々の格子点毎に1>αkij>0の範囲で設定される係数である。過去の重み積算値Wij(k−1)及びパラメータ積算値Vij(k−1)は、忘却係数が小さいほど減少するが、これは過去の積算値Wij(k−1),Vij(k−1)の履歴が忘却された状態に対応している。従って、制御パラメータの最新の取得値zk及び重みwkijは、忘却係数が小さいほど、学習値Zij(k)に反映され易くなり、忘却係数が大きくなるほど、学習値Zij(k)に反映され難くなる。
忘却係数αkijは、個々の格子点毎に1>αkij>0の範囲で設定される係数である。過去の重み積算値Wij(k−1)及びパラメータ積算値Vij(k−1)は、忘却係数が小さいほど減少するが、これは過去の積算値Wij(k−1),Vij(k−1)の履歴が忘却された状態に対応している。従って、制御パラメータの最新の取得値zk及び重みwkijは、忘却係数が小さいほど、学習値Zij(k)に反映され易くなり、忘却係数が大きくなるほど、学習値Zij(k)に反映され難くなる。
図4は、重み付け学習制御の学習値、重み及び重み積算値の挙動が忘却係数の有無に応じて変化する様子を示すタイミングチャートである。なお、この図では、忘却係数αが一定値の場合を例示している。図4において、上段は学習値Zijの挙動を示し、中段は重みwkijの挙動を示し、下段は重み積算値Σw(=Wij)の挙動を示している。図4中に点線で示すように、忘却係数αを用いない場合には、例えば区間(1)において、重みが溜まるため、その後に計測データ(パラメータ取得値zk)が変化しても、学習値Zij(k)が更新されないか、または更新が遅くなる。
これに対し、忘却係数α(一定値)を採用した場合には、図4中に太線で示すように、過去の重み積算値Wij(k−1)及びパラメータ積算値Vij(k−1)を適度に減少(忘却)させ、これらの積算値Wij(k),Vij(k)が過剰に溜まるのを防止することができる。これにより、忘却係数αを用いない場合と比較して、学習値Zij(k)を速やかに更新することができる。従って、学習値Zij(k)の更新量を適切に調整し、学習の応答性を向上させることができ、制御パラメータの急変等にも速やかに対処することができる。
但し、忘却係数αを用いた場合に、制御パラメータの取得値から離れた格子点では、学習値が更新されない状態で、重み積算値Wij(k)が減っていくことになる。このような格子点の近傍で制御パラメータが取得されると、学習値Zij(k)が大きく変化する虞れがある。このため、本実施の形態では、個々の格子点(i,j)の忘却係数αkijを、当該格子点の重みwkijと、1>β>0の範囲で所定の値に設定される重み積算調整係数βとに基いて、下記数7の式により可変に設定する構成としている。
[数7]
αkij=1−wkij*β
αkij=1−wkij*β
上記数7の式によれば、学習動作を繰返すうちに、重み積算値Wij(k)は、特定値(1/β)に収束するようになる。即ち、特定値(1/β)は、重み積算値Wij(k)の下限値となる。従って、忘却係数αを用いた場合でも、重み積算値Wij(k)の減少を適度に制限し、重み積算値Wij(k)が過剰に小さくなるのを防止することができる。なお、重み積算調整係数βの具体的な設定方法については、実施の形態2以降で説明する。
また、前記数7の式に基いて忘却係数αを設定した場合に、重み積算値Wij(k)が収束することは、下記数8乃至数11の式により証明することができる。なお、これらの式は1つの格子点に着目した計算式を示しているので、忘却係数αkijについては、添字i,jを省略し、単に「αk」として表記している。下記の式では、まず、数8の式を等比級数の公式を参考にして変形することにより、数9の式を得ることができ、この式を更に変形することにより、数10の式を得ることができる。そして、数10の式を変形すれば、最終的に数11の式を得ることができる。
ここで、上記数11の式の下段は、重み積算値Wij(k)を3つの項により表した最終的な状態を示している。この式において、まず、第2項は、kが十分に大きいときに0に収束する。第3項は、最近のwk及びαkが一定であるか、またはこれらがランダムであれば0に収束する。従って、前記数7の式を用いて忘却係数αを設定することにより、重み積算値Wij(k)は、特定値(1/β)に収束することがわかる。
次に、図5を参照して、本実施の形態による作用効果について説明する。図5は、重み付け学習制御の学習値、重み及び重み積算値の挙動が忘却係数の設定等に応じて変化する様子を示すタイミングチャートである。この図中の「上限設定」については、後述する実施の形態4で説明する。図5に示すように、忘却係数が一定値の場合には、忘却係数なしの場合と比較して学習の応答性が向上するものの、例えば区間(2)のように、重み積算値Wij(k)が零に近い値まで減少することがある。この場合には、学習値Zij(k)がノイズでも大きく変化するようになるので、ノイズの影響を受け易くなる。これに対し、本実施の形態のように、前記数7の式を用いて忘却係数を可変とした場合には、重み積算値Wij(k)が最小となっても十分な大きさの特定値(1/β)に保持されるので、学習値Zij(k)に対するノイズの影響を抑制することができる。
[重み付け学習制御を実現するための具体的な処理]
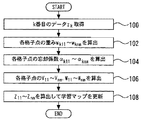
次に、図6を参照して、上述した制御を実現するための具体的な処理について説明する。図6は、本発明の実施の形態1において、ECUにより実行される制御のフローチャートである。この図に示すルーチンは、エンジンの運転中に繰り返し実行されるものとする。図3に示すルーチンでは、まず、ステップ100において、k番目のデータ(パラメータ取得値)zkを取得する。
次に、図6を参照して、上述した制御を実現するための具体的な処理について説明する。図6は、本発明の実施の形態1において、ECUにより実行される制御のフローチャートである。この図に示すルーチンは、エンジンの運転中に繰り返し実行されるものとする。図3に示すルーチンでは、まず、ステップ100において、k番目のデータ(パラメータ取得値)zkを取得する。
次に、ステップ102では、前記数6の式により、k番目の取得タイミングにおける全ての格子点(i,j)の重みwkijを算出する。そして、ステップ104では、個々の格子点(i,j)において、重みwkijと、予め設定された重み積算調整係数βとに基いて、前記数7の式により忘却係数αkijを算出する。また、ステップ106では、k番目のパラメータ取得値zkと、重みwkijと、忘却係数αkijとに基いて、重み積算値Wij(k)及びパラメータ積算値Vij(k)を格子点毎に算出する。次に、ステップ108では、重み積算値Wij(k)とパラメータ積算値Vij(k)とに基いて、全ての格子点(i,j)の学習値Zij(k)を算出し、学習マップを更新する。
以上詳述した通り、本実施の形態では、重み付け学習制御に忘却係数αkijを採用し、その値を各格子点の重みwkijと所定の重み積算調整係数βとに基いて設定する構成としたので、次のような効果を得ることができる。まず、忘却係数αkijによれば、重み積算値Wij(k)を減少させることができるので、重み積算値Wij(k)が過大となることで学習値Zij(k)が更新され難くなるのを防止し、学習の応答性を適切に調整することができる。また、忘却係数αkijを、重みwkijと重み積算調整係数βとに基いて、前記数7の式により設定したので、学習回数が増えた場合でも、重み積算値Wij(k)を特定値(1/β)に収束させることができる。
これにより、特定値(1/β)を重み積算値Wij(k)の下限値として機能させ、学習状況等に応じて変化する重み積算値Wij(k)が特定値(1/β)よりも小さくなるのを制限することができる。この結果、パラメータ取得値zkから離れた格子点において、忘却係数αkijの影響により重み積算値Wij(k)が減少し過ぎて、学習値Zij(k)が過大に変化したり、誤学習やノイズによる誤差が発生するのを抑制することができる。従って、各格子点で重み積算値Wij(k)を適切な範囲で変化させ、学習の応答性と安定性を両立させることができる。
また、本実施の形態では、重み積算調整係数βを小さくするほど、重み積算値Wij(k)の下限値である特定値(1/β)を増加させることができ、過去の重み積算値Wij(k−1)に対する新たな重みwkijの相対的な大きさ、即ち、学習値Zij(k)に対するパラメータ取得値zkの反映度を小さくすることができる。従って、重み積算調整係数βに基いて、学習速度を適切に調整することができる。また、例えば重み積算調整係数βを小さく設定した状態において、学習値Zij(k)が不自然に大きく変化した場合には、この状態を制御パラメータの異常(センサ等の故障)として検出することができ、学習速度に基いて異常検出を実行することができる。
さらに、重み付け制御によれば、次のような効果を得ることができる。まず、重み付け学習制御では、1回の学習動作を行うことにより、パラメータ取得値zkに最も近い格子点(i,j)だけでなく、全ての格子点(i,j)の学習値Zij(k)を距離に応じて重み付けしながら適切に更新することができる。これにより、学習機会が少ない場合でも、最小限の学習回数により全ての格子点(i,j)の学習値Zij(k)を速やかに最適化することができる。しかも、一部の格子点(i,j)で学習値Zij(k)が失われたり、未学習状態が続いた場合でも、これらの学習値Zij(k)を他の位置での学習動作により補完することができる。従って、制御パラメータの種類に関係なく、学習効率を高め、学習制御の信頼性を向上させることができる。
また、重み設定手段としてガウス関数を用いることにより、パラメータ取得値zkの位置(基準位置)からの距離に応じて、重みwkijを滑らかに変化させることができる。従って、学習マップを滑らかにすることができ、学習値Zij(k)の急変等による制御性の悪化を抑制することができる。しかも、標準偏差σの設定に応じて重みwkijの減少特性を変化させることができ、広い学習領域において学習特性(学習の速度や効率)を容易に調整することができる。さらに、制御パラメータを取得する毎に、逐次平均処理を行うことになるので、学習値Zij(k)に対する外乱(ノイズ等)の影響を除去することができる。また、逐次処理により、学習値Zij(k)の演算負荷を時間的に分散させることができるので、ECU60の演算負荷を軽減することができる。
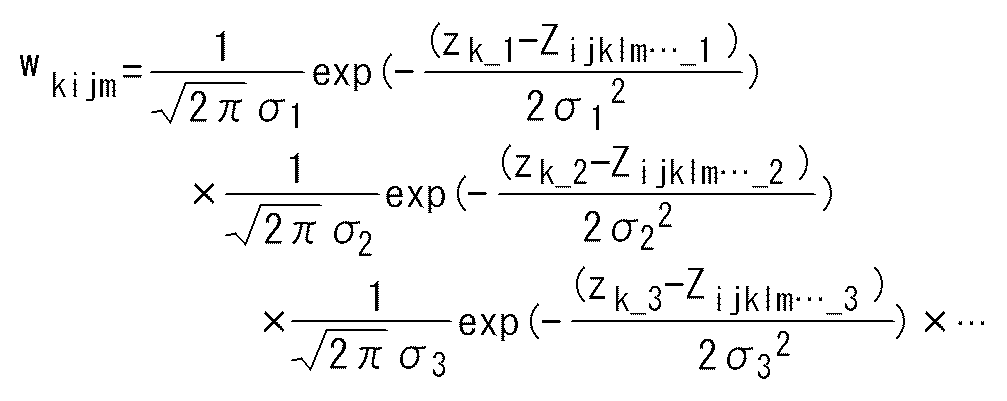
なお、前記実施の形態1では、図2が学習マップの具体例を示している。また、図6中のステップ102が重み設定手段の具体例を示し、ステップ104が忘却係数設定手段の具体例を示している。また、ステップ106が重み積算手段及びパラメータ積算手段の具体例を示し、ステップ108が学習値更新手段の具体例を示している。また、実施の形態1では、ガウス関数として数6の式を例示したが、本発明はこれに限らず、下記数12の式に示すガウス関数により重みwkijを設定してもよい。
上記数12の式において、zk_1は、パラメータ取得値zkの第1軸座標(例えば、図2中のX軸座標)を示し、zk_2はパラメータ取得値zkの第2軸座標(Y軸座標)を示している。また、Zij_1は、学習値Zijに対応する格子点(i,j)の第1軸座標iを示し、Zij_2は、同格子点(i,j)の第2軸座標jを示している。また、同式中のσ1,σ2は、前記標準偏差σの第1軸座標成分,第2軸座標成分に対応するものである。
また、実施の形態1では、2次元の学習マップに適用する場合を例示したが、本発明はこれに限らず、例えば数13の式に示すように、1次元及び3次元以外の任意の次元をもつ学習マップにも適用することができる。なお、この場合には、学習マップの次元数に合わせて、重みwij、重み積算値Wij、パラメータ積算値Vij、学習値Zijの次元数を、wijlmn...、Wijlmn...、Vijlmn...、Zijlmn...のように変更すればよい。
実施の形態2.
次に、図7を参照して、本発明の実施の形態2について説明する。本実施の形態は、前記実施の形態1と同様の構成において、制御パラメータの取得値の信頼度に応じて重み積算調整係数βを変更する構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
次に、図7を参照して、本発明の実施の形態2について説明する。本実施の形態は、前記実施の形態1と同様の構成において、制御パラメータの取得値の信頼度に応じて重み積算調整係数βを変更する構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
[実施の形態2の特徴]
前述したように、重み積算値Wij(k)に下限値(=1/β)を設けると、例えば信頼できないデータが連続的に取得されたので学習値Zij(k)を忘却したい場合等にも、重み積算値Wij(k)を忘却に必要な大きさまで減少させることができない可能性がある。このため、本実施の形態では、制御パラメータの取得値zkの信頼度が低いほど、重み積算調整係数βを小さく設定する構成としている。これにより、例えば取得した計測データ(制御パラメータ)の信頼度が低い場合には、重み積算調整係数βを小さくすることにより、重み積算値Wij(k)の下限値を増加させ、重み積算値Wij(k)を比較的大きな値に保持することができる。
前述したように、重み積算値Wij(k)に下限値(=1/β)を設けると、例えば信頼できないデータが連続的に取得されたので学習値Zij(k)を忘却したい場合等にも、重み積算値Wij(k)を忘却に必要な大きさまで減少させることができない可能性がある。このため、本実施の形態では、制御パラメータの取得値zkの信頼度が低いほど、重み積算調整係数βを小さく設定する構成としている。これにより、例えば取得した計測データ(制御パラメータ)の信頼度が低い場合には、重み積算調整係数βを小さくすることにより、重み積算値Wij(k)の下限値を増加させ、重み積算値Wij(k)を比較的大きな値に保持することができる。
この結果、今回の重みwkijが過去の重み積算値Wij(k−1)と比較して相対的に小さくなるので、信頼性が低い計測データによる学習値Zij(k)の更新を抑制し、学習精度を向上させることができる。また、何らかの理由により計測データが過度に大きく変化してしまい、初期状態から新たな計測データを学習したい場合には、例えば重み積算調整係数βを極端に大きくすることにより、この要求を実現することができる。
図7は、本発明の実施の形態2において、重み積算調整係数βを変更する制御の一例を示すタイミングチャートである。この図に示す制御例では、例えば計測データが大きく変化した場合に、区間(3)において重み積算調整係数βを一時的に増加させる。重み積算調整係数βが大きい場合には、重み積算値Wij(k)が比較的小さな値まで減少し、新たな重みwkijが相対的に大きくなるので、学習値Zij(k)の更新を早くすることができる。従って、計測データの大きな変化に対しても、高い応答性をもって学習値Zij(k)を追従させることができる。また、計測データの信頼度が高い場合にも、重み積算調整係数βを大きくして学習を促進することができる。
このように構成される本実施の形態でも、前記実施の形態1とほぼ同様の効果を得ることができる。そして、特に本実施の形態では、取得した制御パラメータの信頼度や必要性等に応じて重み積算調整係数βを変更することにより、学習値Zij(k)の更新量(速度)を適切に調整することができ、重み付け学習制御をより高い精度で実行することができる。なお、制御パラメータ(計測データ)の信頼度については、学習値Zij(k)を用いる個々の制御において、制御パラメータの種類、特性、正常値の範囲、センサの異常診断の結果等に基いて、自由に設定すればよいものである。
実施の形態3.
次に、図8を参照して、本発明の実施の形態3について説明する。本実施の形態は、前記実施の形態1と同様の構成において、学習マップ上の領域毎に重み積算調整係数βの値を切換える構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
次に、図8を参照して、本発明の実施の形態3について説明する。本実施の形態は、前記実施の形態1と同様の構成において、学習マップ上の領域毎に重み積算調整係数βの値を切換える構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
[実施の形態3の特徴]
学習値の更新速度等については、学習マップ上の領域毎に要求が異なる場合があり、学習マップ全体で重み積算調整係数βを一律に設定すると、その設定値が一部の領域で実際の要求と合わない場合がある。このため、本実施の形態では、学習マップ上の領域毎に重み積算調整係数βの値を切換える構成としている。図8は、本発明の実施の形態3において、学習マップを複数個の領域に分けて重み積算調整係数βを領域毎に切換える構成の一例を模式的に示す説明図である。この図は、学習マップ上の領域を2個の領域A,Bに分割した場合を例示している。
学習値の更新速度等については、学習マップ上の領域毎に要求が異なる場合があり、学習マップ全体で重み積算調整係数βを一律に設定すると、その設定値が一部の領域で実際の要求と合わない場合がある。このため、本実施の形態では、学習マップ上の領域毎に重み積算調整係数βの値を切換える構成としている。図8は、本発明の実施の形態3において、学習マップを複数個の領域に分けて重み積算調整係数βを領域毎に切換える構成の一例を模式的に示す説明図である。この図は、学習マップ上の領域を2個の領域A,Bに分割した場合を例示している。
ここで、領域Aは、例えば制御パラメータに乗るノイズが大きいものの、制御パラメータの経年変化が生じ難い特性を有するものとする。このような領域Aでは、経年変化に対する学習値Zij(k)の感度が鈍くてもよい(学習の応答性が低くてもよい)ので、重み積算調整係数βを比較的小さな値β1に設定するのが好ましい。これにより、領域Aでは、重み積算値Wij(k)が比較的大きな特定値(1/β1)に収束するので、制御パラメータの取得値zkに大きなノイズが乗ったとしても、ノイズの影響が学習値Zij(k)に反映されるのを抑制し、学習精度を向上させることができる。
一方、領域Bは、制御パラメータに乗るノイズが比較的小さいものの、制御パラメータの経年変化が生じ易い特性を有するものとする。このような領域Bでは、ノイズにより学習値Zij(k)に誤差が生じ難く、また、制御パラメータの経年変化に対応して学習の応答性を高くしたいので、重み積算調整係数βを大きな値β2に設定するのが好ましい(β2>β1)。これにより、領域Bでは、重み積算値Wij(k)が比較的小さな特定値(1/β2)に収束するので、制御パラメータの経年変化を学習値Zij(k)に精度よく反映させ、高い学習効果を得ることができる。従って、本実施の形態によれば、前記実施の形態1と同様の効果に加えて、学習マップ上の各領域の要求に応じて重み積算調整係数βを適切な値に切換えることができ、学習マップ全体の学習速度を最適化することができる。
なお、重み積算調整係数βの切換方法としては、次の2つの処理の何れを採用してもよい。まず、第1の切換方法では、個々の格子点(i,j)において、当該格子点が属する領域の重み積算調整係数βに基いて忘却係数αkijを設定する。具体的に述べると、例えば図8中のパラメータ取得値z1に基いて学習動作を行う場合において、領域Aに属する格子点(1,1)、(1,2)、(2,1)、(2,2)、(3,1)、(3,2)では、小さい重み積算調整係数β1を用いて忘却係数αkijを設定する。一方、領域Bに属する格子点(2,3)、(2,4)、(3,3)、(3,4)、(4,3)、(4,4)では、大きい重み積算調整係数β2を用いて忘却係数αkijを設定する。この場合には、1回の学習動作において、個々の領域でそれぞれ学習速度を切換えることができる。
これに対し、第2の切換方法では、パラメータ取得値zkが属する領域の重み積算調整係数βに基いて、全格子点の忘却係数αkijを設定する。具体的に述べると、例えば図8中のパラメータ取得値z1に基いて学習値を更新する場合には、パラメータ取得値z1の位置が領域Aに属するので、領域Aの重み積算調整係数β1に基いて、領域A,Bを含む全格子点の忘却係数αkijを設定する。また、領域Bに属する位置のパラメータ取得値z1′に基いて学習値を更新する場合には、領域Bの重み積算調整係数β2に基いて、領域A,Bを含む全格子点の忘却係数αkijを設定する。この場合には、パラメータ取得値zkが属する領域の特性に応じて、全格子点における学習速度を切換えることができる。
なお、前記実施の形態3では、学習マップ上に2個の領域A,Bを設ける場合を例示したが、本発明において、学習マップ上に設ける領域の個数は、任意の個数に設定してよいものである。また、本発明では、3個以上の領域を設けた場合において、重み積算調整係数βを必ずしも全ての領域で相互に異ならせる必要はなく、少なくとも2個の領域の重み積算調整係数βが異なればよい。
実施の形態4.
次に、図9を参照して、本発明の実施の形態4について説明する。本実施の形態は、前記実施の形態1と同様の構成において、重み積算値を最大値以下に制限する構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
次に、図9を参照して、本発明の実施の形態4について説明する。本実施の形態は、前記実施の形態1と同様の構成において、重み積算値を最大値以下に制限する構成としたことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
前記実施の形態1では、重み積算調整係数βに基いて忘却係数αを算出し、重み積算値Wij(k)を特定値(1/β)に収束させることにより、重みが溜まるのを抑制する構成とした。これに対し、本実施の形態では、上記係数α,βを使用せずに、重み積算値Wij(k)を最大値Wmax以下に制限する構成としている。ここで、最大値Wmaxは、例えば重み積算値Wij(k)を増加させてもよい許容範囲の最大値、即ち、制御パラメータの変化に対する学習の応答性を許容範囲内で最も低下させる重み積算値Wij(k)の値に応じて設定される。また、最大値Wmaxは、後述するように、制御パラメータの取得値zkの信頼度等に応じて変更する構成としてもよい。
以下、図9を参照しつつ、例えば(k+1)番目の積算値Wij(k+1),Vij(k+1)の算出時において、これらの積算値を制限する具体的な処理について説明する。図9は、本発明の実施の形態4において、ECUにより実行される制御を示すフローチャートである。図9において、まず、ステップ200では、今回の重み積算値Wij(k+1)となるべき値が最大値Wmax以下であるか否かの判定、即ち、k番目までの(過去の)重み積算値Wij(k)と(k+1)番目の重みw(k+1)ijとの加算値が下記数14の式を満たす否かの判定を実行する。そして、この判定が成立する場合には、ステップ202に移行して、今回の積算値Wij(k+1),Vij(k+1)を制限なしに算出する。具体的に述べると、ステップ202では、下記数15及び数16の式により積算値Wij(k+1),Vij(k+1)を算出する。
[数14]
Wij(k)+w(k+1)ij≦Wmax
[数15]
Wij(k+1)=Wij(k)+w(k+1)ij
[数16]
Vij(k+1)=Vij(k)+z(k+1)*w(k+1)ij
Wij(k)+w(k+1)ij≦Wmax
[数15]
Wij(k+1)=Wij(k)+w(k+1)ij
[数16]
Vij(k+1)=Vij(k)+z(k+1)*w(k+1)ij
一方、前記数14の式が不成立の場合には、ステップ204に移行して、下記数17及び数18の式により今回の積算値Wij(k),Vij(k)を制限しつつ算出する。即ち、ステップ204では、重み積算値Wij(k+1)を最大値Wmaxに等しく設定し、また、今回のパラメータ積算値Vij(k+1)も、重み積算値Wij(k+1)が制限された割合に応じて制限する。
[数17]
Wij(k+1)=Wmax
Wij(k+1)=Wmax
なお、図9に示す積算値Wij(k),Vij(k)の算出処理は、前述した重み付け学習制御の一部を構成するものであり、例えば実施の形態1(図6)のステップ104,106に代えて、全ての格子点について実行される。但し、図6は、k番目の算出処理を例示したのに対し、本実施の形態では、(k+1)番目の算出処理を例示している。また、図9中のステップ200,204は、重み積算値制限手段の具体例を示している。
このように構成される本実施の形態でも、前記実施の形態1とほぼ同様の作用効果を得ることができる。具体的に述べると、実施の形態1で説明した図5には、重み積算値Wij(k)を最大値Wmax以下に制限した場合の各パラメータの挙動を、「上限設定あり」として付記している。この図に示すように、「上限設定あり」の場合には、学習値Zij(k)の挙動が忘却係数可変(実施の形態1)の場合とほぼ等しくなるため、両者のデータ線は重複している。
従って、本実施の形態によれば、重み積算値Wij(k)が過大となって学習値Zij(k)が更新され難くなるのを防止することができる。これにより、各格子点で重み積算値Wij(k)を適切な範囲で変化させ、学習の応答性と安定性を両立させることができる。また、最大値Wmaxを大きくするほど、学習値Zij(k)に対する制御パラメータの取得値zkの反映度を抑制することができる。これにより、最大値Wmaxに基いて、学習の応答性(学習速度)を適切に調整することができる。
また、前記図5からも判るように、本実施の形態の構成では、学習動作を繰返すうちに、重み積算値Wij(k)が最大値Wmaxと等しくなる状態(最大値Wmaxに張付く状態)となる。この状態では、前記実施の形態2で述べたように、例えば信頼できないデータが連続的に取得されたので学習値Zij(k)を忘却したい場合等にも、重み積算値Wij(k)を忘却に必要な大きさまで減少させることができない可能性がある。この場合には、例えば制御パラメータの取得値zkの信頼度が低いほど、最大値Wmaxを大きく設定する構成とすればよい。これにより、実施の形態2と同様の作用効果を得ることができる。
また、本実施の形態では、前記実施の形態3のように、学習マップを複数個の領域に分けて最大値Wmaxを領域毎に切換える構成としてもよい。この場合、学習の応答性を高くしたい領域では、最大値Wmaxを小さく設定し、学習の応答性を低くしたい領域では、最大値Wmaxを大きく設定すればよい。これにより、実施の形態3と同様の作用効果を得ることができる。
実施の形態5.
次に、図10を参照して、本発明の実施の形態5について説明する。本実施の形態は、前記実施の形態1乃至4の何れかで述べた重み付け学習制御を、点火時期の学習制御に適用したことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
次に、図10を参照して、本発明の実施の形態5について説明する。本実施の形態は、前記実施の形態1乃至4の何れかで述べた重み付け学習制御を、点火時期の学習制御に適用したことを特徴としている。なお、本実施の形態では、実施の形態1と同一の構成要素に同一の符号を付し、その説明を省略するものとする。
[実施の形態5の特徴]
図10は、本発明の実施の形態5による点火時期制御を示す制御ブロック図である。本実施の形態のシステムは、ECU60の記憶回路または演算機能に含まれるMBTマップ100、TKマップ102、Min選択部104、燃焼重心算出部106、燃焼重心目標設定部108、FBゲイン算出部110及び学習制御部112を備えている。MBTマップ100は、複数の参照パラメータに基いて、制御パラメータである点火時期を算出する多次元の学習マップにより構成されている。ここで、参照パラメータの例を挙げると、機関回転数Ne、機関負荷KL、水温、VVT等の可変動弁機構34,36によるバルブタイミング制御量、EGR弁42の制御量等がある。また、MBTマップ100の各格子点には、エンジントルクが最大となる点火時期であるMBT(Minimum spark advance for Best Torque)の学習値Zij(k)がそれぞれ記憶されている。
図10は、本発明の実施の形態5による点火時期制御を示す制御ブロック図である。本実施の形態のシステムは、ECU60の記憶回路または演算機能に含まれるMBTマップ100、TKマップ102、Min選択部104、燃焼重心算出部106、燃焼重心目標設定部108、FBゲイン算出部110及び学習制御部112を備えている。MBTマップ100は、複数の参照パラメータに基いて、制御パラメータである点火時期を算出する多次元の学習マップにより構成されている。ここで、参照パラメータの例を挙げると、機関回転数Ne、機関負荷KL、水温、VVT等の可変動弁機構34,36によるバルブタイミング制御量、EGR弁42の制御量等がある。また、MBTマップ100の各格子点には、エンジントルクが最大となる点火時期であるMBT(Minimum spark advance for Best Torque)の学習値Zij(k)がそれぞれ記憶されている。
本実施の形態では、エンジンの運転中において、点火時期をMBTに一致させるMBT制御を実行する。MBT制御では、まず、前記各参照パラメータに基いてMBTマップ100を参照することにより、フィードフォワード(FF)項である点火時期Advを算出する。このときには、TKマップ102及びMin選択部104も機能するが、これらの機能については後述する。次に、燃焼重心算出部106は、MBTマップ100により算出された点火時期Advでの燃焼より得られる燃焼重心CA50を、筒内圧センサ50の出力等に基いて下記数19の式により算出する。この式は、燃焼質量割合MFB(Mass Fraction of Burned fuel)を算出する公知の式であり、燃焼重心CA50は、MFB=50%となるクランク角θとして定義される。なお、下記数19の式において、Pは筒内圧、Vは筒内容積、κは比熱比、θsは燃焼開始クランク角、θeは燃焼終了クランク角をそれぞれ示している。
次に、燃焼重心目標設定部108は、所定の燃焼重心目標値(例えば、ATDC8℃A等)を読出し、FBゲイン算出部110は、燃焼重心CA50が燃焼重心目標値と一致するように、点火時期Advを補正(フィードバック制御)する。これにより、点火時期Advは、MBTと一致するように補正された補正後の点火時期Adv′となる。
ここで、エンジンの運転領域には、MBTを実現することができるMBT領域と、MBTを実現できないTK領域(トレースノック領域)とが存在する。TK領域は、点火時期をMBTまで進角する前にトレースノック(本格的なノックの発生前に生じる弱いノック)が発生する領域であり、この領域では、MBTの学習が困難となる。このため、TK領域の点火時期(TK点火時期)は、TKマップ102により学習される。TKマップ102は、MBTマップ120と同様に構成された多次元の学習マップであり、TKマップ102の各格子点には、制御パラメータであるTK点火時期の学習値Zij(k)がそれぞれ更新可能に記憶されている。そして、点火時期制御では、MBTマップ100により算出したMBT(点火時期Adv)と、TKマップ102により算出したTK点火時期のうち、大きい方(より遅角側)の点火時期がMin選択部104により選択される。そして、選択された点火時期が最終的な補正前の点火時期Advとして出力される。
一方、学習制御部112は、燃焼重心CA50が燃焼重心目標値とほぼ一致した場合(MBTが実現された場合)にのみ、補正後の点火時期Adv′を制御パラメータの取得値zkとして、MBTマップ100の重み付け学習制御を実行し、点火時期Adv′をMBTの学習値Zij(k)に反映させる。但し、MBTが実現される前に、筒内圧センサ50の出力に基いてトレースノックの発生を検出した場合には、MBTマップ100の学習を実行せず、TKマップ102の重み付け学習制御を実行する。この場合には、トレースノックを検出した時点の点火時期(TK点火時期)がパラメータ取得値zkとなる。
(重み積算調整係数βの設定)
このように構成される本実施の形態の点火時期制御において、重み積算調整係数βは、下記(1)〜(4)の制御により変更してもよい。
(1)MBTは、燃料の種類や性状に応じて変化し易いので、給油を検出した直後には、重み積算調整係数βを検出前よりも大きく設定し、過去の履歴を速やかに忘却させる構成としてもよい。なお、給油の有無は、例えば給油口の開閉や燃料の液面レベルの変化に基いて検出することができる。
(2)バッテリ端子の取外し(バッテリクリア)が行われた場合には、点火プラグ28が交換されている可能性があり、この場合にはMBTが変化し易い。従って、バッテリクリアを検出した場合には、重み積算調整係数βを検出前よりも大きく設定し、過去の履歴を速やかに忘却させる構成としてもよい。
(3)冷間(低温)運転時には、ソーク時間等を考慮していない影響でMBTが大きくずれることがある。従って、この場合には、重み積算調整係数βを暖機運転時よりも小さく設定し、MBTの学習値に対するノイズの影響を抑制する構成としてもよい。
(4)冷間運転時には、学習機会が少ないので、誤学習が生じている可能性が高い。このため、MBTマップ100は、重み積算調整係数βを通常の大きさに設定した第1のMBTマップと、重み積算調整係数βを第1のMBTマップよりも大きく設定した第2のMBTマップとにより構成してもよい。そして、前記2つのMBTマップ間で学習値の偏差が大きい場合には、誤学習が生じているものと判定して、MBTの算出に用いる学習マップを、第1の学習マップから第2の学習マップに切換える構成とする。
このように構成される本実施の形態の点火時期制御において、重み積算調整係数βは、下記(1)〜(4)の制御により変更してもよい。
(1)MBTは、燃料の種類や性状に応じて変化し易いので、給油を検出した直後には、重み積算調整係数βを検出前よりも大きく設定し、過去の履歴を速やかに忘却させる構成としてもよい。なお、給油の有無は、例えば給油口の開閉や燃料の液面レベルの変化に基いて検出することができる。
(2)バッテリ端子の取外し(バッテリクリア)が行われた場合には、点火プラグ28が交換されている可能性があり、この場合にはMBTが変化し易い。従って、バッテリクリアを検出した場合には、重み積算調整係数βを検出前よりも大きく設定し、過去の履歴を速やかに忘却させる構成としてもよい。
(3)冷間(低温)運転時には、ソーク時間等を考慮していない影響でMBTが大きくずれることがある。従って、この場合には、重み積算調整係数βを暖機運転時よりも小さく設定し、MBTの学習値に対するノイズの影響を抑制する構成としてもよい。
(4)冷間運転時には、学習機会が少ないので、誤学習が生じている可能性が高い。このため、MBTマップ100は、重み積算調整係数βを通常の大きさに設定した第1のMBTマップと、重み積算調整係数βを第1のMBTマップよりも大きく設定した第2のMBTマップとにより構成してもよい。そして、前記2つのMBTマップ間で学習値の偏差が大きい場合には、誤学習が生じているものと判定して、MBTの算出に用いる学習マップを、第1の学習マップから第2の学習マップに切換える構成とする。
このように構成される本実施の形態によれば、前記(1)〜(4)の制御により、エンジンの運転環境に基いて重み積算調整係数βを変更することができる。これにより、運転環境(給油の有無、点火プラグの交換の有無、冷間運転時であるか否か等)に応じて学習速度を適切に調整し、また、誤学習やノイズに対して的確に対処することができる。
また、本実施の形態によれば、点火時期の学習制御において、前記実施の形態1とほぼ同様の作用効果を得ることができる。即ち、重み付け学習制御は、燃焼重心CA50が燃焼重心目標値とほぼ一致した場合にのみ実行されるが、1回の学習動作によりMBTマップ100の全格子点でMBTを効率よく学習することができるので、学習機会が比較的少なくても、学習を十分に行うことができる。
なお、前記実施の形態5では、FBゲイン算出部110が点火時期補正手段の具体例を示し、学習制御部112が重み設定手段、重み積算手段、パラメータ積算手段、忘却係数設定手段及び学習値更新手段の具体例を示している。また、前記(1)〜(4)の制御が係数変更手段の具体例を示している。また、実施の形態5では、(1)〜(4)の制御を組合わせるものとしたが、本発明は、必ずしも全ての制御を一緒に用いる必要はなく、(1)〜(4)のうち一部の制御のみを用いる構成としてもよい。
前記実施の形態1乃至5では、1つの車両に搭載されたECU60により重み付け学習制御を実行し、各種の学習値を保有する場合を例示した。しかし、本発明はこれに限らず、複数車両のECU間でデータ通信等により学習値を共有する構成としてもよい。これにより、学習機会が少ない運転状態(冷間時等)の取得データ数を他車との共有により増加させ、学習の効率や精度を向上させることができる。また、自車の学習値を、他車の学習値の平均と比較することにより、誤学習を検出することができる。なお、他車の学習値は、例えば車載のネットワークを利用して取得したり、サービス工場に蓄積した他車の学習値を入庫時に取得すればよい。また、前記実施の形態1乃至5では、それぞれの構成を個別に説明したが、本発明はこれに限らず、実施の形態1乃至5のうち組合わせ可能な任意の2つ以上の構成を組合わせて1つのシステムを構成してもよい。
10 エンジン(内燃機関)
14 燃焼室
16 クランク軸
18 吸気通路
20 スロットルバルブ
22 排気通路
24 触媒
26 燃料噴射弁
28 点火プラグ
30 吸気バルブ
32 排気バルブ
44 クランク角センサ
46 エアフローセンサ
48 水温センサ
50 筒内圧センサ
52 吸気温度センサ
54 空燃比センサ
56 酸素濃度センサ
60 ECU
100 MBTマップ(学習マップ)
110 FBゲイン算出部(点火時期補正手段)
112 学習制御部(重み設定手段、重み積算手段、パラメータ積算手段、忘却係数設定手段及び学習値更新手段)
14 燃焼室
16 クランク軸
18 吸気通路
20 スロットルバルブ
22 排気通路
24 触媒
26 燃料噴射弁
28 点火プラグ
30 吸気バルブ
32 排気バルブ
44 クランク角センサ
46 エアフローセンサ
48 水温センサ
50 筒内圧センサ
52 吸気温度センサ
54 空燃比センサ
56 酸素濃度センサ
60 ECU
100 MBTマップ(学習マップ)
110 FBゲイン算出部(点火時期補正手段)
112 学習制御部(重み設定手段、重み積算手段、パラメータ積算手段、忘却係数設定手段及び学習値更新手段)
Claims (8)
- 複数の格子点(i,j)を有し、内燃機関の制御に用いる制御パラメータの学習値Zijが前記各格子点にそれぞれ更新可能に記憶された学習マップと、
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記重みの積算履歴を忘却させるために、前記重み積算値Wij(k)及び前記パラメータ積算値Vij(k)を算出するときに前記合計値Wij(k−1),Vij(k−1)にそれぞれ乗算する忘却係数αkijを1>αkij>0の範囲で設定する忘却係数設定手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、を備え、
前記忘却係数設定手段は、個々の格子点の重みwkijと、1>β>0を満たす範囲で所定の値に設定される重み積算調整係数βとに基いて、当該格子点における忘却係数αkijを(αkij=1−wkij*β)の式により設定する構成としたことを特徴とする内燃機関の制御装置。 - 前記制御パラメータの取得値zkの信頼度が低いほど、重み積算調整係数βを小さく設定する構成としてなる請求項1に記載の内燃機関の制御装置。
- 前記学習マップは互いに異なる複数の領域を備え、
前記忘却係数設定手段は、前記重み積算調整係数βの値を前記複数の領域毎に切換える構成としてなる請求項1または2に記載の内燃機関の制御装置。 - 前記重み設定手段は、前記制御パラメータの取得値zkの位置からの距離に応じて前記重みwkijが正規分布曲線状に減少するガウス関数である請求項1乃至3のうち何れか1項に記載の内燃機関の制御装置。
- 前記学習マップは、内燃機関のトルクが最大となる点火時期であるMBTの学習値が前記各格子点にそれぞれ記憶されたMBTマップであり、
筒内圧に基いて算出された燃焼重心が所定の燃焼重心目標値と一致するように、前記MBTマップにより算出した点火時期を補正する手段であって、補正後の点火時期が前記制御パラメータの取得値zkとなる点火時期補正手段と、
内燃機関の運転環境に基いて前記重み積算調整係数βを変更する係数変更手段と、
を備えてなる請求項1乃至4のうち何れか1項に記載の内燃機関の制御装置。 - 複数の格子点(i,j)を有し、内燃機関の制御に用いる制御パラメータの学習値Zijが前記各格子点にそれぞれ更新可能に記憶された学習マップと、
前記制御パラメータがk回目に取得されたときに、前記学習マップ上における前記制御パラメータの取得値zkの位置から格子点までの距離が大きいほど当該格子点の重みwkijが減少するように、前記各格子点の重みwkijをそれぞれ1≧wkij≧0の範囲で設定する重み設定手段と、
個々の格子点の重みwkijを、当該格子点における前回までの重みwkijの合計値Wij(k−1)に加算することにより、初回からk回目までの重みwkijの合計値に対応する重み積算値Wij(k)を格子点毎に算出する重み積算手段と、
前記各格子点の重み積算値Wij(k)の最大値Wmaxを設定し、前記重み積算手段により算出される前記重み積算値Wij(k)を前記最大値Wmax以下に制限する重み積算値制限手段と、
前記制御パラメータの取得値zkと前記重みwkijとの積(zk*wkij)を、当該格子点における前回までの積(zk*wkij)の合計値Vij(k−1)に加算することにより、初回からk回目までの積(zk*wkij)の合計値に対応するパラメータ積算値Vij(k)を格子点毎に算出するパラメータ積算手段と、
前記制御パラメータが取得される毎に、全ての格子点において、前記パラメータ積算値Vij(k)を前記重み積算値Wij(k)で除算することにより、各格子点の学習値Zijをk回目の学習値Zij(k)に更新する学習値更新手段と、
を備えることを特徴とする内燃機関の制御装置。 - 前記制御パラメータの取得値zkの信頼度が低いほど、前記最大値Wmaxを大きく設定する構成としてなる請求項6に記載の内燃機関の制御装置。
- 前記学習マップは互いに異なる複数の領域を備え、
前記重み積算値制限手段は、前記最大値Wmaxの値を前記複数の領域毎に切換える構成としてなる請求項6または7に記載の内燃機関の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012143254A JP2014005803A (ja) | 2012-06-26 | 2012-06-26 | 内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012143254A JP2014005803A (ja) | 2012-06-26 | 2012-06-26 | 内燃機関の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014005803A true JP2014005803A (ja) | 2014-01-16 |
Family
ID=50103739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012143254A Withdrawn JP2014005803A (ja) | 2012-06-26 | 2012-06-26 | 内燃機関の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014005803A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016008508A (ja) * | 2014-06-20 | 2016-01-18 | トヨタ自動車株式会社 | 内燃機関システム |
| CN107990898A (zh) * | 2016-10-26 | 2018-05-04 | 株式会社久保田 | 行驶路径生成装置 |
| JP2020063699A (ja) * | 2018-10-17 | 2020-04-23 | トヨタ自動車株式会社 | 内燃機関の制御装置及びその制御方法、並びに内燃機関を制御するための学習モデル及びその学習方法 |
-
2012
- 2012-06-26 JP JP2012143254A patent/JP2014005803A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016008508A (ja) * | 2014-06-20 | 2016-01-18 | トヨタ自動車株式会社 | 内燃機関システム |
| CN107990898A (zh) * | 2016-10-26 | 2018-05-04 | 株式会社久保田 | 行驶路径生成装置 |
| CN107990898B (zh) * | 2016-10-26 | 2023-02-24 | 株式会社久保田 | 行驶路径生成装置 |
| JP2020063699A (ja) * | 2018-10-17 | 2020-04-23 | トヨタ自動車株式会社 | 内燃機関の制御装置及びその制御方法、並びに内燃機関を制御するための学習モデル及びその学習方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5861779B2 (ja) | 内燃機関の制御装置 | |
| JP5103459B2 (ja) | エンジンの制御装置 | |
| US7654252B2 (en) | Air-fuel ratio control system and method for internal combustion engine | |
| JP4251228B2 (ja) | 内燃機関の制御装置 | |
| US8024107B2 (en) | Ignition timing control system for internal combustion engine | |
| JP3980424B2 (ja) | 内燃機関の空燃比制御装置 | |
| CN103380281B (zh) | 用于内燃机的控制器和控制方法 | |
| JP2007247476A (ja) | 内燃機関の制御装置 | |
| JP2014005803A (ja) | 内燃機関の制御装置 | |
| US6738706B2 (en) | Method for estimating engine parameters | |
| CN107076097A (zh) | 发动机的控制装置 | |
| JP2018184866A (ja) | 内燃機関の制御装置 | |
| US8798893B2 (en) | Fuel injection control apparatus for internal combustion engine and fuel injection control method for internal combustion engine | |
| JP5925641B2 (ja) | 内燃機関の吸気制御装置 | |
| US7725245B2 (en) | Throttle valve control system for internal combustion engine | |
| JP2016211504A (ja) | 内燃機関の制御装置 | |
| JP2014070525A (ja) | 内燃機関の制御装置 | |
| JP2009046988A (ja) | 内燃機関の制御装置 | |
| JP5610979B2 (ja) | 内燃機関の制御装置 | |
| JP2003049682A (ja) | 内燃機関の制御装置 | |
| JP5229118B2 (ja) | 内燃機関トルク制御装置 | |
| JP2017193968A (ja) | 内燃機関の制御装置 | |
| JP2011058475A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP2009047097A (ja) | 内燃機関の制御方法および制御装置 | |
| JP2014238046A (ja) | 内燃機関の学習装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150319 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20151102 |