JP2014006131A - 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 - Google Patents
速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 Download PDFInfo
- Publication number
- JP2014006131A JP2014006131A JP2012141487A JP2012141487A JP2014006131A JP 2014006131 A JP2014006131 A JP 2014006131A JP 2012141487 A JP2012141487 A JP 2012141487A JP 2012141487 A JP2012141487 A JP 2012141487A JP 2014006131 A JP2014006131 A JP 2014006131A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- acceleration
- calculation
- angle
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004364 calculation method Methods 0.000 title claims abstract description 99
- 230000001133 acceleration Effects 0.000 claims abstract description 121
- 238000001514 detection method Methods 0.000 claims abstract description 38
- 230000033001 locomotion Effects 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 19
- 238000010586 diagram Methods 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 8
- 238000004891 communication Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
Images







Landscapes
- Navigation (AREA)
Abstract
【解決手段】速度算出装置100は、移動体に搭載されるものであり、角度検出部101と、第1加速度検出部102と、第1算出部103と、出力部104とを有する。角度検出部101は、車両の左右の傾きを示すロール角度および車両が旋回する角度を示すヨー角度を検出する。第1加速度検出部102は、車両の進行方向に対して直角かつ水平な方向の加速度を検出する。第1算出部103は、角度検出部101によって検出されたロール角度およびヨー角度と、第1加速度検出部102によって検出された加速度とに基づいて、移動体の旋回時における移動速度を算出する。出力部104は、第1算出部103によって算出された移動速度を出力する。
【選択図】図1
Description
(速度算出装置の機能的構成)
図1を用いて、この発明の実施の形態にかかる速度算出装置の機能的構成について説明する。図1は、本実施の形態にかかる速度算出装置の機能的構成の一例を示すブロック図である。速度算出装置100は、タイヤの回転速度に比例した時間間隔にて検出される車速信号を取得することができない簡易型のナビゲーション装置を対象とし、例えば、PND(Portable Navigation Device)、スマートフォン、携帯電話などの電子機器によって実現される。
ya=Y×cosθ+g×sinθ・・・(1)式
として表すことができる。なお、車両の横向き加速度Yとは、路面と水平方向かつ進行方向と垂直な方向にかかる加速度である。
Y=δ×S・・・(2)式
として表すことができる。(1)式、(2)式から、Yを消去することにより、旋回時の移動速度Sを求めると、
ya=(δ×S)×cosθ+g×sinθ
(δ×S)×cosθ=ya−g×sinθ
S=(ya−g×sinθ)/(δ×cosθ)・・・(3)式
として表すことができる。
このように、本実施の形態では、y軸加速度ya、重力加速度g、ロール角度θ、ヨー角度δによって、車両の旋回時の移動速度を算出することができる。
つぎに、図3を用いて、速度算出装置100の速度算出処理手順について説明する。図3は、本実施の形態にかかる速度算出装置100の速度算出処理手順の一例を示すフローチャートである。
図4を用いて、本実施例にかかるナビゲーション装置400のハードウェア構成について説明する。図4は、本実施例にかかるナビゲーション装置400のハードウェア構成の一例を示すブロック図である。
つぎに、図5を用いて、ナビゲーション装置400の速度算出処理手順について説明する。図5は、ナビゲーション装置400の速度算出処理手順の一例を示すフローチャートである。図5のフローチャートにおいて、ナビゲーション装置400は、起動したか否かを判断する(ステップS501)。ナビゲーション装置400は、起動するまで待機し(ステップS501:No)、起動すると(ステップS501:Yes)、GPS情報を受信しているか否かを判定する(ステップS502)。
つぎに、図6を用いて、GPS情報を受信することが不可能な条件下における車両の走行軌跡の一例について説明する。図6は、GPS情報を受信することが不可能な条件下における車両の走行軌跡の一例を示す説明図である。
つぎに、図7を用いて、GPS情報を受信することが不可能な条件下における車両の移動速度の一例について説明する。図7は、GPS情報を受信することが不可能な条件下における車両の移動速度の一例を示す説明図である。図7のグラフ700において、縦軸は、速度および方位変化量(ヨー角度)を示しており、横軸は、時間を示している。図7に示すA点およびB点は、図6に示したA点およびB点に対応するものとする。
S=(ya−g×sinθ)/(δ×cosθ)・・・(3)式
旋回時の移動速度S(m/s)は、
S[m/s]≒11.7
として算出される。
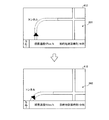
つぎに、図8を用いて、ディスプレイ412に表示される表示画面の一例を説明する。図8は、ディスプレイ412に表示される表示画面の一例を示す説明図である。図8において、表示画面801,802は、GPS情報を受信することが不可能なトンネル内を走行している状態を示している。表示画面801は、直進路を走行している際の画面を示しており、表示画面802は、旋回時の画面を示している。
101 角度検出部
102 第1加速度検出部
103 第1算出部
104 出力部
105 取得部
106 第2加速度検出部
107 第2算出部
108 補正部
400 ナビゲーション装置
412 ディスプレイ
414 GPSユニット
415 各種センサ
421 加速度センサ
422 ジャイロセンサ
Claims (6)
- 移動体の左右の傾きを示すロール角度および前記移動体が旋回する角度を示すヨー角度を検出する角度検出手段と、
前記移動体の進行方向に対して直角かつ水平な方向の加速度を検出する第1加速度検出手段と、
前記角度検出手段によって検出された前記ロール角度および前記ヨー角度と、前記第1加速度検出手段によって検出された前記加速度とに基づいて、移動体の旋回時における移動速度を算出する第1算出手段と、
前記第1算出手段によって算出された前記移動速度を出力する出力手段と、
を備えることを特徴とする速度算出装置。 - 前記移動体の位置情報を取得する取得手段をさらに備え、
前記第1算出手段は、前記取得手段による前記位置情報の取得が可能な条件下では、前記位置情報を用いて移動体の移動速度を算出し、
前記取得手段による前記位置情報の取得が不可能な条件下では、前記ロール角度および前記ヨー角度と、前記加速度とに基づいて、移動体の移動速度を算出することを特徴とする請求項1に記載の速度算出装置。 - 前記移動体の進行方向の加速度を検出する第2加速度検出手段と、
前記第2加速度検出手段によって検出された前記加速度に基づいて、前記移動体の進行方向の移動速度(以下「第2算出速度」という)を算出する第2算出手段と、
前記第2算出速度と、前記第1算出手段によって算出された前記移動速度(以下「第1算出速度」という)との乖離した量に基づいて前記第2算出速度を補正する補正手段と、
をさらに備え、
前記出力手段は、前記移動体の路面に対する移動速度として、前記移動体が旋回している際には前記第1算出速度を出力し、前記移動体が直進している際には前記補正手段によって補正された前記第2算出速度を出力することを特徴とする請求項1または2に記載の速度算出装置。 - 速度を算出する速度算出装置の速度算出方法であって、
前記速度算出装置は、
移動体の左右の傾きを示すロール角度および前記移動体が旋回する角度を示すヨー角度を検出する角度検出工程と、
前記移動体の進行方向に対して直角かつ水平な方向の加速度を検出する第1加速度検出工程と、
前記角度検出工程にて検出された前記ロール角度および前記ヨー角度と、前記第1加速度検出工程にて検出された前記加速度とに基づいて、移動体の旋回時における移動速度を算出する第1算出工程と、
前記第1算出工程にて算出された前記移動速度を出力する出力工程と、
を実行することを特徴とする速度算出方法。 - 請求項4に記載の速度算出方法をコンピュータに実行させることを特徴とする速度算出プログラム。
- 請求項5に記載の速度算出プログラムを記録したことを特徴とするコンピュータに読み取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012141487A JP5891120B2 (ja) | 2012-06-22 | 2012-06-22 | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012141487A JP5891120B2 (ja) | 2012-06-22 | 2012-06-22 | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014006131A true JP2014006131A (ja) | 2014-01-16 |
| JP5891120B2 JP5891120B2 (ja) | 2016-03-22 |
Family
ID=50103987
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012141487A Active JP5891120B2 (ja) | 2012-06-22 | 2012-06-22 | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5891120B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016109553A (ja) * | 2014-12-05 | 2016-06-20 | 株式会社富士通アドバンストエンジニアリング | 通信システム、通信装置、通信方法、および通信プログラム |
| JP2016109479A (ja) * | 2014-12-03 | 2016-06-20 | 古野電気株式会社 | 車速演算装置および車速演算方法 |
| WO2020137312A1 (ja) * | 2018-12-28 | 2020-07-02 | パナソニックIpマネジメント株式会社 | 測位装置及び移動体 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09243383A (ja) * | 1996-03-08 | 1997-09-19 | Matsushita Electric Ind Co Ltd | 移動体位置速度算出装置 |
| JP4024075B2 (ja) * | 2002-04-26 | 2007-12-19 | パイオニア株式会社 | 移動状況算出装置、この方法、このプログラム、このプログラムを記録する記録媒体、および、ナビゲーション装置 |
| JP2009236532A (ja) * | 2008-03-26 | 2009-10-15 | Seiko Epson Corp | 測位方法、プログラム及び測位装置 |
| JP4724163B2 (ja) * | 2007-09-14 | 2011-07-13 | 株式会社豊田中央研究所 | 車体速度推定装置 |
| JP5219547B2 (ja) * | 2008-02-21 | 2013-06-26 | アルパイン株式会社 | 車載ナビゲーションシステム及びナビゲーション方法 |
-
2012
- 2012-06-22 JP JP2012141487A patent/JP5891120B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09243383A (ja) * | 1996-03-08 | 1997-09-19 | Matsushita Electric Ind Co Ltd | 移動体位置速度算出装置 |
| JP4024075B2 (ja) * | 2002-04-26 | 2007-12-19 | パイオニア株式会社 | 移動状況算出装置、この方法、このプログラム、このプログラムを記録する記録媒体、および、ナビゲーション装置 |
| JP4724163B2 (ja) * | 2007-09-14 | 2011-07-13 | 株式会社豊田中央研究所 | 車体速度推定装置 |
| JP5219547B2 (ja) * | 2008-02-21 | 2013-06-26 | アルパイン株式会社 | 車載ナビゲーションシステム及びナビゲーション方法 |
| JP2009236532A (ja) * | 2008-03-26 | 2009-10-15 | Seiko Epson Corp | 測位方法、プログラム及び測位装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016109479A (ja) * | 2014-12-03 | 2016-06-20 | 古野電気株式会社 | 車速演算装置および車速演算方法 |
| JP2016109553A (ja) * | 2014-12-05 | 2016-06-20 | 株式会社富士通アドバンストエンジニアリング | 通信システム、通信装置、通信方法、および通信プログラム |
| WO2020137312A1 (ja) * | 2018-12-28 | 2020-07-02 | パナソニックIpマネジメント株式会社 | 測位装置及び移動体 |
| JPWO2020137312A1 (ja) * | 2018-12-28 | 2020-07-02 | ||
| US12203757B2 (en) | 2018-12-28 | 2025-01-21 | Panasonic intellectual property Management co., Ltd | Positioning apparatus capable of measuring position of moving body using image capturing apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5891120B2 (ja) | 2016-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4466705B2 (ja) | ナビゲーション装置 | |
| US9921065B2 (en) | Unit and method for improving positioning accuracy | |
| JP5057952B2 (ja) | 角速度補正装置及びその補正方法並びにナビゲーション装置 | |
| US20020022924A1 (en) | Propagation of position with multiaxis accelerometer | |
| JP2013535669A (ja) | 車両ナビゲーションシステムの動的パラメータを較正するための装置および方法 | |
| JP5545663B2 (ja) | ジャイロ用ゼロ点補正方法及び装置 | |
| JP2011013204A (ja) | ナビゲーション地図に基づく誤差修正機能を備えた慣性ナビゲーションシステム | |
| JP4561802B2 (ja) | 地図表示装置及びプログラム | |
| US20080243384A1 (en) | Azimuth determination apparatus, azimuth determination method and azimuth determination program | |
| JP4794384B2 (ja) | 車両位置補正装置及び車両位置補正方法 | |
| JP2010190721A (ja) | 車載ナビゲーション装置及び車両方位変更箇所判定プログラム | |
| JP5891120B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP2011209162A (ja) | ナビゲーション装置 | |
| JP5916540B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| JP2011191243A (ja) | 車載用ジャイロのオフセット補正装置 | |
| JP4791316B2 (ja) | 車載用ナビゲーション装置及び車両進行方向検出方法 | |
| JP5982190B2 (ja) | 車両位置検出装置および車両位置検出方法 | |
| JP5241958B2 (ja) | 情報処理装置、情報処理方法、プログラム、および記録媒体 | |
| JP2006227019A (ja) | 加速度を利用した処理装置 | |
| JP2002206934A (ja) | ナビゲーション装置 | |
| KR101676145B1 (ko) | 곡률계산 장치 및 곡률보정 방법 | |
| JP2013250167A (ja) | 距離計測装置、距離補正方法、距離補正プログラム、および記録媒体 | |
| JP4268581B2 (ja) | 車載用ナビゲーション装置 | |
| JP2017122741A (ja) | 判定装置、判定方法、判定プログラム、および記録媒体 | |
| JP2006227018A (ja) | 加速度を利用した処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151117 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5891120 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |