JP2014006162A - XYθステージ機構 - Google Patents
XYθステージ機構 Download PDFInfo
- Publication number
- JP2014006162A JP2014006162A JP2012142266A JP2012142266A JP2014006162A JP 2014006162 A JP2014006162 A JP 2014006162A JP 2012142266 A JP2012142266 A JP 2012142266A JP 2012142266 A JP2012142266 A JP 2012142266A JP 2014006162 A JP2014006162 A JP 2014006162A
- Authority
- JP
- Japan
- Prior art keywords
- stage
- support means
- xyθ
- setting support
- orientation setting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 title claims abstract description 95
- 230000033001 locomotion Effects 0.000 claims description 13
- 230000005540 biological transmission Effects 0.000 description 6
- 230000001276 controlling effect Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 239000002245 particle Substances 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000004323 axial length Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images
















Landscapes
- Machine Tool Units (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Details Of Measuring And Other Instruments (AREA)
Abstract
【課題】小型化が要求されていた。
【解決手段】一面内を移動可能とされるステージLと、ステージの位置および姿勢を設定する位置姿勢設定支持手段11,12,13がステージを支持し、
位置姿勢設定支持手段は、ステージ面に直交する駆動軸m1を有する回転駆動源mと、駆動軸に固定されて回動する回転リンク部rm1と、回転リンク部とステージとを接続する接続部r1と、を有するものとされ、
回転リンク部の角度調節によってステージの位置および位置を設定する。
【選択図】図1
【解決手段】一面内を移動可能とされるステージLと、ステージの位置および姿勢を設定する位置姿勢設定支持手段11,12,13がステージを支持し、
位置姿勢設定支持手段は、ステージ面に直交する駆動軸m1を有する回転駆動源mと、駆動軸に固定されて回動する回転リンク部rm1と、回転リンク部とステージとを接続する接続部r1と、を有するものとされ、
回転リンク部の角度調節によってステージの位置および位置を設定する。
【選択図】図1
Description
本発明は、XYθステージ機構に係り、半導体装置やプリント基板、液晶表示素子等の露光装置などで、ステージを移動して、ステージ上の対象を所定の位置に位置決めする装置に用いて好適な技術に関する。
たとえばFPD(flat panel display, フラットパネルディスプレイ)製造装置においては、長方形の薄ガラス基板を、成膜や露光のために水平2自由度、および回転角度の精密アライメントを行うことが要求されている。このような位置制御の精密性を満たすために、XYステージ、およびθステージを用いてこれらの位置決めが行われてきた。
最近では、特許文献1に示すように、UVWステージと呼ばれる、3個の駆動軸の干渉駆動を用いた装置も使われている。また、位置精度制御性の向上のために、4軸とすることが特許文献2に記載されている。
最近では、特許文献1に示すように、UVWステージと呼ばれる、3個の駆動軸の干渉駆動を用いた装置も使われている。また、位置精度制御性の向上のために、4軸とすることが特許文献2に記載されている。
これらの駆動ステージ、および駆動モータは真空装置内に設置されることもあり、また大気側に部分的、または全体を設置することもある。
上記のようなステージ支持における精密位置決めにおいては、駆動伝達系の経路上の減速要素、軸受け要素が最小限、かつこれらによる損失が最小限であることが望ましい。しかし、上記のような直動駆動系の機構を採用した場合には、トルク伝達における損失が大きくこれを削減したいという要求があった。同時に、同程度の出力を得る場合に駆動系をなるべく小型化したいという要求があった。
さらに、駆動系およびステージ支持部分を小型化、特に、ステージ面と直交する方向における寸法を削減したいという要求があった。
さらに、駆動系およびステージ支持部分を小型化、特に、ステージ面と直交する方向における寸法を削減したいという要求があった。
本発明は、上記の事情に鑑みてなされたもので、以下の目的を達成しようとするものである。
1.部品点数が少なく簡単な構造で、駆動系を小型化したステージの実現を図ること。
2.重量物の載置にも対応して駆動系の損失を抑制可能とすること。
3.ステージ面と直交する方向における寸法の削減を測ること。
1.部品点数が少なく簡単な構造で、駆動系を小型化したステージの実現を図ること。
2.重量物の載置にも対応して駆動系の損失を抑制可能とすること。
3.ステージ面と直交する方向における寸法の削減を測ること。
本発明のXYθステージ機構は、一面内を移動可能とされるステージを有し、該ステージの面内方向内の位置および姿勢決め制御を可能とするXYθステージ機構であって、
前記ステージの位置および姿勢を設定する位置姿勢設定支持手段が3箇所以上設けられて前記ステージを支持し、
前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸に固定されて回動する回転リンク部と、該回転リンク部と前記ステージとを接続する接続部と、を有するものとされ、
前記回転リンク部の角度調節によって前記ステージの位置および位置を設定することにより上記課題を解決した。
本発明において、前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸から径方向長さ一定に固定されて回動する回転リンク部と、
前記駆動軸と平行な第1回転軸で一端側が前記回転リンク部に接続されるとともに前記駆動軸と平行な第2回転軸で他端側が前記ステージに接続される長さ一定の接続部と、
を有するものとされることがより好ましい。
本発明のXYθステージ機構には、前記位置姿勢設定支持手段においては、前記駆動軸と前記第2回転軸とが、前記ステージ面に対して互いに異なる高さ位置として前記ステージ面法線方向視して重なるように設けられる円柱部分を有し、これら前記駆動軸と前記第2回転軸とを貫通するように設けられる前記第1回転軸が円柱部分を有し、
前記第1回転軸と前記駆動軸、および前記第1回転軸と前記第2回転軸、における円柱部分の中心軸線がいずれも前記ステージ面内方向に離間することが可能である。
また、本発明において、前記位置姿勢設定支持手段が4箇所以上設けられる手段を採用することや、前記位置姿勢設定支持手段には、回転駆動されないものを有する手段を採用することもできる。
また、前記位置姿勢設定支持手段は、前記接続部が前記ステージ面内方向に直線方向動作可能な位置規制部で前記ステージに接続されることができる。
本発明においては、前記位置姿勢設定支持手段として、前記ステージ面内方向に直線動作のみの位置規制部であるステージ支持手段が設けられていることが望ましい。
さらに、 昇降1軸+2軸のチルト機構を有するZ方向制御機構を追加することで、4〜6自由度の動作が可能とされていることが可能である。
また、前記ステージが真空または減圧雰囲気下に設置されることがある。
本発明においては、前記駆動源が真空または減圧雰囲気下に設置されることが好ましい。
本発明においては、前記ステージが大気圧、および大気圧に対して陽圧の雰囲気下に設置されることがある。
また、前記駆動源が大気圧、および大気圧に対して陽圧の雰囲気下に設置されることができる。
本発明においては、前記駆動源が真空シール機構を介して大気側に設置されることか、または、前記駆動源が気密シール機構を介して大気側に設置されることができる。
前記ステージの位置および姿勢を設定する位置姿勢設定支持手段が3箇所以上設けられて前記ステージを支持し、
前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸に固定されて回動する回転リンク部と、該回転リンク部と前記ステージとを接続する接続部と、を有するものとされ、
前記回転リンク部の角度調節によって前記ステージの位置および位置を設定することにより上記課題を解決した。
本発明において、前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸から径方向長さ一定に固定されて回動する回転リンク部と、
前記駆動軸と平行な第1回転軸で一端側が前記回転リンク部に接続されるとともに前記駆動軸と平行な第2回転軸で他端側が前記ステージに接続される長さ一定の接続部と、
を有するものとされることがより好ましい。
本発明のXYθステージ機構には、前記位置姿勢設定支持手段においては、前記駆動軸と前記第2回転軸とが、前記ステージ面に対して互いに異なる高さ位置として前記ステージ面法線方向視して重なるように設けられる円柱部分を有し、これら前記駆動軸と前記第2回転軸とを貫通するように設けられる前記第1回転軸が円柱部分を有し、
前記第1回転軸と前記駆動軸、および前記第1回転軸と前記第2回転軸、における円柱部分の中心軸線がいずれも前記ステージ面内方向に離間することが可能である。
また、本発明において、前記位置姿勢設定支持手段が4箇所以上設けられる手段を採用することや、前記位置姿勢設定支持手段には、回転駆動されないものを有する手段を採用することもできる。
また、前記位置姿勢設定支持手段は、前記接続部が前記ステージ面内方向に直線方向動作可能な位置規制部で前記ステージに接続されることができる。
本発明においては、前記位置姿勢設定支持手段として、前記ステージ面内方向に直線動作のみの位置規制部であるステージ支持手段が設けられていることが望ましい。
さらに、 昇降1軸+2軸のチルト機構を有するZ方向制御機構を追加することで、4〜6自由度の動作が可能とされていることが可能である。
また、前記ステージが真空または減圧雰囲気下に設置されることがある。
本発明においては、前記駆動源が真空または減圧雰囲気下に設置されることが好ましい。
本発明においては、前記ステージが大気圧、および大気圧に対して陽圧の雰囲気下に設置されることがある。
また、前記駆動源が大気圧、および大気圧に対して陽圧の雰囲気下に設置されることができる。
本発明においては、前記駆動源が真空シール機構を介して大気側に設置されることか、または、前記駆動源が気密シール機構を介して大気側に設置されることができる。
本発明のXYθステージ機構は、一面内を移動可能とされるステージを有し、該ステージの面内方向内の位置および姿勢決め制御を可能とするXYθステージ機構であって、前記ステージの位置および姿勢を設定する位置姿勢設定支持手段が3箇所以上設けられて前記ステージを支持し、前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸に固定されて回動する回転リンク部と、該回転リンク部と前記ステージとを接続する接続部と、を有するものとされ、前記回転リンク部の角度調節によって前記ステージの位置および位置を設定することにより、直線駆動式の駆動源に比べてトルクが大きく出力に比して小型化が可能な回転駆動源を組み合わせることによって、ステージにおけるXYθ方向の位置設定及び角度(姿勢)制御を高い精度でおこなうことが可能となる。
これにより、例えば、真空内に設置して被位置決め部材を積載するための座板を有し、その座板の水平面内の任意の位置決め制御を行うステージ機構として、その位置決めには、水平面内2自由度の位置、および座板の水平面内に直交する軸周りの回転角度の計3自由度を位置決め制御できるものであって、その駆動のために3個以上の駆動要素を有し、その駆動軸は水平面に対して直交して配置される構成を実現することが可能となる。
本発明において、前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸から径方向長さ一定に固定されて回動する回転リンク部と、前記駆動軸と平行な第1回転軸で一端側が前記回転リンク部に接続されるとともに前記駆動軸と平行な第2回転軸で他端側が前記ステージに接続される長さ一定の接続部と、を有するものとされることにより、駆動源によって回転リンク部の角度を設定するだけで、長さの固定された回転リンクと接続部との位置関係が決まり、ステージのXYθ姿勢制御及び位置制御をおこなうことが可能となる。なお、接続部は第1回転軸および第2回転軸のいずれにおいても、回動可能に接続されているだけである。
このように本発明は、その各々の駆動軸には各々、第1のリンク(回転リンク部)が接続され、その回転角度が制御され、その第1のリンクの駆動軸反対側の端部に第2のリンク(接続部)が駆動軸と平行に回転自由で接続され、その第2のリンクの、第1リンクとの接続部反対側の端部に前述の座板(ステージ)が駆動軸と平行に回転自由で接続され、各々の駆動軸部、第2リンクと座板の接続部は同一軸上でない構成とすることができる。
本発明のXYθステージ機構の前記位置姿勢設定支持手段においては、前記駆動軸と前記第2回転軸とが、前記ステージ面に対して互いに異なる高さ位置として前記ステージ面法線方向視して重なるように設けられる円柱部分を有し、これら前記駆動軸と前記第2回転軸とを貫通するように設けられる前記第1回転軸が円柱部分を有し、前記第1回転軸と前記駆動軸、および前記第1回転軸と前記第2回転軸、における円柱部分の中心軸線がいずれも前記ステージ面内方向に離間するとともに、前記第1回転軸の円柱部分の長さが、前記駆動軸と前記第2回転軸との円柱部分の長さの和とほぼ等しく設定されてなることで、前記第2回転軸と前記駆動軸とを、ステージとこのステージを支持する基台とに回動可能に支持する高さ(軸方向長さ)のみの寸法とすることができるため、ステージ支持に必要な高さをほとんど設けない程度に小さくすることが可能となる。
また、本発明において、前記位置姿勢設定支持手段が4箇所以上設けられる手段を採用
して、前述の3個の駆動軸に加え、冗長な働きをする駆動軸および各リンクを、1軸分以上加えた構成とすることで、ガタ成分の打ち消し削減、およびステージの安定性をより向上することができる。
この際、駆動源を備えた前記位置姿勢設定支持手段を4以上として例えば矩形のステージの四隅を支持することができる。
さらに、4箇所以上の前記位置姿勢設定支持手段には、回転駆動されないものを有する手段を採用し、ステージ支持の目的のため、駆動軸部および各リンクを加えたものから、駆動動力要素を省略した構成として、ステージの安定性は確保したまま、製造コストを抑制することも可能である。
して、前述の3個の駆動軸に加え、冗長な働きをする駆動軸および各リンクを、1軸分以上加えた構成とすることで、ガタ成分の打ち消し削減、およびステージの安定性をより向上することができる。
この際、駆動源を備えた前記位置姿勢設定支持手段を4以上として例えば矩形のステージの四隅を支持することができる。
さらに、4箇所以上の前記位置姿勢設定支持手段には、回転駆動されないものを有する手段を採用し、ステージ支持の目的のため、駆動軸部および各リンクを加えたものから、駆動動力要素を省略した構成として、ステージの安定性は確保したまま、製造コストを抑制することも可能である。
また、前記位置姿勢設定支持手段は、前記接続部が前記ステージ面内方向に一方向動作可能な位置規制部で前記ステージに接続されることが可能である。
なお、回転リンク部の一端に固定された駆動軸が1自由度を有して摺動可能にステージに設けられたガイドレール等の接続部に接続されるとともに、回転リンク部の他端側が回転軸により基台に回転可能に設けられてなる構成、つまり、ステージ支持のために、直動のガイド機構、および、または直動ガイド機構+回転支持機構を組み合わせた構成も可能である。この場合も、回転リンク部における駆動軸と回転軸との距離は不変(固定)とされている。これにより、上述した構成と同様に回転駆動源による回転リンクの角度設定をおこなうだけでステージの位置・姿勢制御を正確におこなうことが可能となる。
なお、回転リンク部の一端に固定された駆動軸が1自由度を有して摺動可能にステージに設けられたガイドレール等の接続部に接続されるとともに、回転リンク部の他端側が回転軸により基台に回転可能に設けられてなる構成、つまり、ステージ支持のために、直動のガイド機構、および、または直動ガイド機構+回転支持機構を組み合わせた構成も可能である。この場合も、回転リンク部における駆動軸と回転軸との距離は不変(固定)とされている。これにより、上述した構成と同様に回転駆動源による回転リンクの角度設定をおこなうだけでステージの位置・姿勢制御を正確におこなうことが可能となる。
本発明においては、前記位置姿勢設定支持手段とは異なるステージ支持手段が設けられていることにより、重量物であるステージの場合あるいは積載重量が大きく設定された場合にも、ステージ荷重を充分支持しつつ位置決め精度を維持することが可能となる。
さらに、位置姿勢設定支持手段には、前記ステージ面と直交する方向に変位制御可能なZ変位手段が設けられていることにより、ステージ面のチルト角を制御して、ステージ面方向維持あるいは所定角度へ傾ける制御が可能となる。なお、この場合、ステージ支持手段にも同様のZ変位手段を設けることが好ましい。
また、前記ステージが真空または減圧雰囲気下に設置されることがあり、この場合、前記駆動源が真空または減圧雰囲気下に設置されるか、あるいは、前記駆動源が真空シール機構を介して大気側に設置されることができる。
前記駆動源が真空または減圧雰囲気下に設置された場合には、直動駆動系を用いることなく、位置姿勢制御をおこなうことができるので、パーティクルあるいは潤滑剤等の真空度の低下要因となる物質を雰囲気中への放出を直動駆動系に比べて抑制することができる。この際、駆動軸の回転駆動のために、真空環境中で使用することができる電動機、および位置決め装置を用いること、具体的には、駆動状態によって真空等の雰囲気中に露出する面積が変化しない回転駆動系とされることが好ましい。これらの電動機およびステージ位置姿勢設定支持手段は、真空等の雰囲気中に露出した基台とされる移動しない固定部の台座に接続固定されることができる。
前記駆動源が真空または減圧雰囲気下に設置された場合には、直動駆動系を用いることなく、位置姿勢制御をおこなうことができるので、パーティクルあるいは潤滑剤等の真空度の低下要因となる物質を雰囲気中への放出を直動駆動系に比べて抑制することができる。この際、駆動軸の回転駆動のために、真空環境中で使用することができる電動機、および位置決め装置を用いること、具体的には、駆動状態によって真空等の雰囲気中に露出する面積が変化しない回転駆動系とされることが好ましい。これらの電動機およびステージ位置姿勢設定支持手段は、真空等の雰囲気中に露出した基台とされる移動しない固定部の台座に接続固定されることができる。
前記駆動源が真空または減圧雰囲気下に設置された場合には、前述の接続部、回転リンク部、およびこれらの支持軸受け部が、ステージおよび移動しない固定部の台座のそれぞれの固定厚さに対して、台1回転軸の高さの半分以上が重複した高さとなっていることができる。
本発明においては、上記の構成として、一般的に不利な直動機構を全廃または削減することにより、位置姿勢設定支持手段を真空等の減圧雰囲気に載置する場合には、位置姿勢設定支持手段からの放出ガスを低く抑えること、長寿命であること、メンテナンスフリーに近いことを実現でき、真空特性を極めて向上することができる。同時に、FPDや半導体の製造装置では、ステージ支持・駆動系におけるパーティクルの発生を抑制して、被処理対象の基板にパーティクルが付着しないようにすることができる。
従って、本発明によれば、軸受け要素は全てを回転機構とすることができ、これら防塵シール機構が容易に装備できるため真空特性上とても有利である。
もちろん、ステージ設置部(雰囲気)は大気圧、および陽圧環境であっても良い。
従って、本発明によれば、軸受け要素は全てを回転機構とすることができ、これら防塵シール機構が容易に装備できるため真空特性上とても有利である。
もちろん、ステージ設置部(雰囲気)は大気圧、および陽圧環境であっても良い。
本発明によれば、駆動伝達系は直動系の構成に対して精度が高い回転軸受けとリンク部材のみで構成されるため、高精度の位置伝達、低損失のトルク伝達が実現できるという効果を奏することができる。また、精密位置決めにおいては、駆動伝達系の経路上の減速要素、軸受け要素を最小限とするとともに、これらによる損失が最小限とすることができる。
以下、本発明に係るXYθステージ機構の第1実施形態を、図面に基づいて説明する。
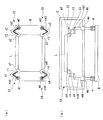
図1は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図において、符号10は、XYθステージ機構である。
図1は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図において、符号10は、XYθステージ機構である。
本実施形態におけるXYθステージ機構は、図1に示すように、平面視して略矩形のステージLと、ステージLをベース(基台)Bに支持する3つの位置姿勢設定支持手段11,12,13とが、減圧雰囲気とすることができるチャンバC内部に設けられたものとされている。位置姿勢設定支持手段11,12,13を制御することにより、ステージLがその表面と平行な面内を移動し、かつ、この面内における傾きを変位させてXYθ位置設定可能とされている。
位置姿勢設定支持手段11,12,13はいずれも略同等の構成とされており、ステージLへの接続箇所およびベースBへの接続箇所が異なるのみである。
以下、位置姿勢設定支持手段11,12,13について説明するが、符号の下一文字を1,2,3とした場合、位置姿勢設定支持手段11,12,13のそれぞれに対応するように読み替えるものとする。
以下、位置姿勢設定支持手段11,12,13について説明するが、符号の下一文字を1,2,3とした場合、位置姿勢設定支持手段11,12,13のそれぞれに対応するように読み替えるものとする。
位置姿勢設定支持手段11は、ステージL表面に直交する駆動軸m1を有するようにベースBに固定されたモータ(回転駆動源)mと、駆動軸m1から径方向長さ一定に固定されて回動可能な回転リンク部rm1と、駆動軸m1と平行な第1回転軸x1で一端側が回転リンク部rm1に接続されるとともに駆動軸m1と平行な第2回転軸p1で他端側がステージLに接続される長さ一定の接続部r1と、を有し、回転リンク部rm1と接続部r1とが、ステージL表面に対して互いに異なる高さ位置として設けられる。ベースBからステージLに向かって、モータm、回転リンク部rm1、接続部r1、第2回転軸p1の順に位置するよう積み重ねられている。
位置姿勢設定支持手段11は、第1回転軸x1と第2回転軸p1とにおいて、回転リンク部rm1と接続部r1、および、接続部r1とステージLとが回転自在に接続されているので、モータmによって駆動軸m1を回転させることで、回転リンク部rm1が回動して所定の位置まで回転する。このとき、同時に、置姿勢設定支持手段12,13でも、同様に、回転リンク部rm1が回動して所定の位置まで回転する。これにより、ステージLをXYθ方向へ移動させる。
ステージLの動作と位置姿勢設定支持手段11,12,13のモータmの動作の関係は以下のようになっている。図2,図3に示すように、モータmの設置座標としてそれぞれ(xm1,ym1)(xm2,ym2)(xm3,ym3)、回転リンク部rmと接続部rとされるリンクの座標(x1,y1)(x2,y2)(x3,y3)(xp1,yp1)(xp2,yp2)(xp3,yp3)、リンク長さ寸法r1,r2,r3,rm1,rm2,rm3、ステージL寸法L01,L12,L23,L03を定数として設定する。
そして、まず初期状態として、ステージLの座標として図示左下の頂点となる基準点(xp0,yp0)およびステージLの設定角度s0、モータ角度sm1,sm2,sm3、を与えた後、移動後の条件として所望の点(xp0,yp0)および角度s0の変化量(Δxp0,Δyp0)および角度Δs0を設定することで、この姿勢・位置とするモータ角度sm1,sm2,sm3の値を算出する。
これにより、各モータ角度sm1,sm2,sm3を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御して任意に動作させることができる。
これにより、各モータ角度sm1,sm2,sm3を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御して任意に動作させることができる。
本実施形態においては、駆動時にチャンバC内に露出する面積が必然的に拡大せざるを得ない直動タイプのアクチュエータ機構を全く採用せずに回転モータのみでステージLの位置・姿勢設定が可能となるので、位置姿勢設定支持手段11,12,13において真空度の低下要因となる放出ガスを低く抑えること、長寿命であること、メンテナンスフリーに近いことを実現するとともに、ステージ支持・駆動系におけるパーティクルの発生を抑制して真空特性を極めて向上させた状態を維持しつつ、精密な位置決めを簡単な構成でおこなうことが可能となる。
本実施形態においては、位置姿勢設定支持手段11,12,13を矩形状のステージLの3箇所の角部分に接続したが、図4に示すように、位置姿勢設定支持手段11をステージLno辺の途中に設けることもできる。これにより、ステージLからの荷重を分散して、より安定した状態でステージを支持することが可能となる。
以下、本発明に係るXYθステージ機構の第2実施形態を、図面に基づいて説明する。
図5は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図1〜図4に示す第1実施形態と異なるのは位置姿勢設定支持手段14に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図5は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図1〜図4に示す第1実施形態と異なるのは位置姿勢設定支持手段14に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図5に示すように、平面視して略矩形のステージLの左下となる(xp0,yp0)となる点に、位置姿勢設定支持手段14が設けられてベースBに固定されている。この位置姿勢設定支持手段14は、位置姿勢設定支持手段11,12,13と略同等の構成とされて、対応する構成には符号の下一文字を4として表記してある。
本実施形態においては、第1実施形態と同様に、ステージLをベース(基台)Bに支持する4つの位置姿勢設定支持手段11,12,13,14が設けられ、これら4つのモータ角度sm1,sm2,sm3,sm4を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御してに任意に動作させることができる。同時に、例えば、第1実施形態における位置姿勢設定支持手段11,12,13でのステージLの駆動に対し、位置姿勢設定支持手段14によってステージLを位置姿勢設定支持手段14側に向けて引張するように制御することにより、ステージLの支持における安定性が格段に向上する。
以下、本発明に係るXYθステージ機構の第3実施形態を、図面に基づいて説明する。
図6は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図1〜図4に示す第1実施形態、図5に示す第2実施形態と異なるのは支持手段15に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図6は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図1〜図4に示す第1実施形態、図5に示す第2実施形態と異なるのは支持手段15に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図6に示すように、平面視して略矩形のステージLの左下となる(xp0,yp0)となる点に、位置姿勢設定支持手段14に変えて、支持手段15が設けられてベースBに固定されている。この支持手段15は、位置姿勢設定支持手段11,12,13,14と略同等のリンク機構を有する構成とされて、対応する構成には符号の下一文字を5として表記してある。
支持手段15は、駆動モータを有せず、駆動軸ではなく、回転軸mp5によって、回転リンク部rm5がベースBに接続されている。
支持手段15は、駆動モータを有せず、駆動軸ではなく、回転軸mp5によって、回転リンク部rm5がベースBに接続されている。
本実施形態においては、第2実施形態と同様に、ステージLをベース(基台)Bに支持する3つの位置姿勢設定支持手段11,12,13が設けられ、これら3つのモータ角度sm1,sm2,sm3を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御して任意に動作させることができる。同時に、例えば、第1実施形態における位置姿勢設定支持手段11,12,13でのステージLの駆動に対し、ステージ支持手段15によってステージLを安定的に支持することができる。
なお、第2実施形態において位置姿勢設定支持手段14を設けた構成として、モータmを駆動しない状態として対応することも可能である。
さらに、第2実施形態において位置姿勢設定支持手段11,12,13のうちどれか1つのモータmを駆動しない状態とすることも可能である。
なお、第2実施形態において位置姿勢設定支持手段14を設けた構成として、モータmを駆動しない状態として対応することも可能である。
さらに、第2実施形態において位置姿勢設定支持手段11,12,13のうちどれか1つのモータmを駆動しない状態とすることも可能である。
以下、本発明に係るXYθステージ機構の第4実施形態を、図面に基づいて説明する。
図7は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのは真空シールmaに関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図7は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのは真空シールmaに関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図7に示すように、各駆動軸m1,m2,m3,m4がチャンバCを貫通して外部に設けられたモータmに接続されている。駆動軸m1,m2,m3,m4はいずれも、真空シールmaでシール状態を維持されている。
本実施形態においては、第2実施形態と同様に、ステージLをベース(基台)Bに支持する4つの位置姿勢設定支持手段11,12,13,14が設けられ、これら4つのモータ角度sm1,sm2,sm3,sm4を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御してに任意に動作させることができる。同時に、真空等の減厚雰囲気ではなく外部の大気中でモータmを駆動させることができるので、真空用でないモータmにも対応することができる。
なお、本実施形態において位置姿勢設定支持手段11,12,13,14のうちどれか1つのモータmを駆動しない状態とすることも可能である。
なお、本実施形態において位置姿勢設定支持手段11,12,13,14のうちどれか1つのモータmを駆動しない状態とすることも可能である。
以下、本発明に係るXYθステージ機構の第5実施形態を、図面に基づいて説明する。
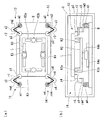
図8は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのはステージ支持手段K1,K2,K3,K4に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図8は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのはステージ支持手段K1,K2,K3,K4に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図8に示すように、位置姿勢設定支持手段11,12,13,14とは独立してステージLの荷重を支持する各ステージ支持手段K1,K2,K3,K4が設けられている。
ステージ支持手段K1は、ガイドレールK1aとこのガイドレールK1aに沿って移動可能な観点支持軸K1bとを有する構成とされる。ステージ支持手段K1,K2,K3,K4、同様の構成とされるが、ステージ支持手段K1,K2は位置姿勢設定支持手段11から位置姿勢設定支持手段14に向かう方向(位置姿勢設定支持手段12から位置姿勢設定支持手段13に向かう方向)に並進可能に設けられ、ステージ支持手段K3,K4は位置姿勢設定支持手段11から位置姿勢設定支持手段12に向かう方向(位置姿勢設定支持手段14から位置姿勢設定支持手段13に向かう方向)に並進可能に設けられている。また、ステージ支持手段K1,K2はステージL下側に儲けられ、ステージ支持手段K3,K4はベースB上側に儲けられ、ステージ支持手段K1,K2とステージ支持手段K3,K4とは、ステージLと平行な支持板体K0を介して接続されている。
ステージ支持手段K1は、ガイドレールK1aとこのガイドレールK1aに沿って移動可能な観点支持軸K1bとを有する構成とされる。ステージ支持手段K1,K2,K3,K4、同様の構成とされるが、ステージ支持手段K1,K2は位置姿勢設定支持手段11から位置姿勢設定支持手段14に向かう方向(位置姿勢設定支持手段12から位置姿勢設定支持手段13に向かう方向)に並進可能に設けられ、ステージ支持手段K3,K4は位置姿勢設定支持手段11から位置姿勢設定支持手段12に向かう方向(位置姿勢設定支持手段14から位置姿勢設定支持手段13に向かう方向)に並進可能に設けられている。また、ステージ支持手段K1,K2はステージL下側に儲けられ、ステージ支持手段K3,K4はベースB上側に儲けられ、ステージ支持手段K1,K2とステージ支持手段K3,K4とは、ステージLと平行な支持板体K0を介して接続されている。
本実施形態においては、第2実施形態と同様に、ステージLをベース(基台)Bに支持する4つの位置姿勢設定支持手段11,12,13,14が設けられ、これら4つのモータ角度sm1,sm2,sm3,sm4を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御してに任意に動作させることができる。同時に、ステージ支持手段K1,K2,K3,K4によりステージLの荷重を支持してステージLの位置・姿勢制御をおこなうことができ、大荷重に対応しつつステージLの安定性を向上することができる。なお、ステージ支持手段の設置個数は4に限らず、ステージLの荷重に応じて増減することが可能である。
以下、本発明に係るXYθステージ機構の第6実施形態を、図面に基づいて説明する。
図9は、本実施形態におけるXYθステージ機構を模式的に示す斜視図であり、図10は、本実施形態における位置姿勢設定支持手段示す拡大断面図であり、図5に示す第2実施形態と異なるのは位置姿勢設定支持手段20に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図9は、本実施形態におけるXYθステージ機構を模式的に示す斜視図であり、図10は、本実施形態における位置姿勢設定支持手段示す拡大断面図であり、図5に示す第2実施形態と異なるのは位置姿勢設定支持手段20に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図9に示すように、位置姿勢設定支持手段21,22,23,24がステージLの四隅に設けられている。
本実施形態における位置姿勢設定支持手段21,22,23,24はいずれも略同等の構成とされており、ステージLへの接続箇所およびベースBへの接続箇所が異なるのみである。
以下、位置姿勢設定支持手段21,22,23,24について説明するが、図9に示すように、代表して位置姿勢設定支持手段20について説明する。
以下、位置姿勢設定支持手段21,22,23,24について説明するが、図9に示すように、代表して位置姿勢設定支持手段20について説明する。
位置姿勢設定支持手段20は、図10に示すように、ステージLに回動可能に埋め込まれた円柱部分2pと、ベースBに回動可能に埋め込まれた円柱部分2mと、これらの円柱部分2pと2mとを貫通しつつそれぞれ回動可能に埋め込まれた円柱部分2xとを概略有する。
円柱部分2pは、図10に示すように、ボールベアリング2pbを介してステージLに回動可能に埋め込まれ、円柱部分2mは、ボールベアリング2mbを介してベースBに回動可能に埋め込まれ、円柱部分2xは、ステージL側端部2rがボールベアリング2rbを介して円柱部分2pに回動可能に埋め込まれ、ベースB側端部2rmがボールベアリング2rmbを介して円柱部分2mに回動可能に埋め込まれている。また、円柱部分2xの中心軸線x0と円柱部分2pの中心軸線p0と円柱部分2mの中心軸線m0とはいずれも平行でステージL表面に直交し、かつ、貫通する円柱部分2xの中心軸線x0は、円柱部分2pの中心軸線p0と距離rだけ離間するとともに、同時に円柱部分2xの中心軸線x0は、円柱部分2mの中心軸線m0と距離rmだけ離間している。
円柱部分2pは、図10に示すように、ボールベアリング2pbを介してステージLに回動可能に埋め込まれ、円柱部分2mは、ボールベアリング2mbを介してベースBに回動可能に埋め込まれ、円柱部分2xは、ステージL側端部2rがボールベアリング2rbを介して円柱部分2pに回動可能に埋め込まれ、ベースB側端部2rmがボールベアリング2rmbを介して円柱部分2mに回動可能に埋め込まれている。また、円柱部分2xの中心軸線x0と円柱部分2pの中心軸線p0と円柱部分2mの中心軸線m0とはいずれも平行でステージL表面に直交し、かつ、貫通する円柱部分2xの中心軸線x0は、円柱部分2pの中心軸線p0と距離rだけ離間するとともに、同時に円柱部分2xの中心軸線x0は、円柱部分2mの中心軸線m0と距離rmだけ離間している。
つまり、位置姿勢設定支持手段20は、図10に示すように、ベースBに固定されたモータ(回転駆動源)mに接続された駆動軸2mとこれに平行な第2回転軸2pとされ、かつ、ステージL表面に対して互いに異なる高さ位置としてステージL面法線方向視して重なるように設けられる円柱部分2mと円柱部分2pとを有するとともに、これら駆動軸2mと第2回転軸2pとを貫通するように設けられる第1回転軸2xとされる円柱部分2xを有する。さらに、これら第1回転軸2xの中心軸線x0と駆動軸2mの中心軸線m0、および、第1回転軸2xの中心軸線x0と第2回転軸2pの中心軸線p0が、それぞれステージL表面内方向に、それぞれ距離rm、距離rずつ離間して設けられる。同時に、第1回転軸x0の円柱部分2xの軸方向長さH2xが、駆動軸m0の円柱部分2mの長さH2mと第2回転軸p0との円柱部分2pの長さH2pの和とほぼ等しくなるよう設定されている。
これにより、位置姿勢設定支持手段20では、図10に示すように、ステージL表面に直交する駆動軸m0を有するようにベースBに固定されたモータ(回転駆動源)mと、駆動軸m0から径方向長さrmが一定とされて回動可能な回転リンク部が、円柱部分2m、ボールベアリング2rmb、円柱部分2xの端部2rmから構成される。同時に、位置姿勢設定支持手段20では、駆動軸m0と平行な第1回転軸x0で一端側が回転リンク部に接続されるとともに駆動軸m0と平行な第2回転軸p0で他端側がステージLに接続される長さrが一定の接続部が、円柱部分2xの端部2r、ボールベアリング2rb、円柱部分2pから構成される。
位置姿勢設定支持手段20では、回転リンク部と接続部とが、ステージLとベースBとの高さ位置となるように設けられる。つまり、高さH2rおよび高さH2mの和はベースBとステージLとの厚さの和に等しく、高さH2rおよび高さH2mの和と高さH2xとの差は、ベースBとステージLとの隙間の寸法となっている。
位置姿勢設定支持手段20では、回転リンク部と接続部とが、ステージLとベースBとの高さ位置となるように設けられる。つまり、高さH2rおよび高さH2mの和はベースBとステージLとの厚さの和に等しく、高さH2rおよび高さH2mの和と高さH2xとの差は、ベースBとステージLとの隙間の寸法となっている。
位置姿勢設定支持手段20は、円柱部分2mをモータで回転駆動することで、駆動軸2mに接続された回転リンク部となる円柱部分2xの端部2rmを駆動軸線x0の周りで回転させ、同時に、円柱部分2xが回動することで、第1回転軸x0と第2回転軸p0とにおいて接続部となる円柱部分2xの端部2rと円柱部分2pが回動し、これに接続されたステージLが回転することになる。したがって、位置姿勢設定支持手段11,12,13,14と同様に、ステージLを支持しつつ、ステージLをXYθ方向へ移動させて位置・姿勢制御をおこなうことができる。
本実施形態においては、第2実施形態と同様に、矩形のステージLをベース(基台)Bに支持する4つの位置姿勢設定支持手段21,22,23,24がそれぞれ四隅に設けられ、これら4つのモータ角度sm1,sm2,sm3,sm4を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御して任意に動作させることができる。また、極めて小型の位置姿勢設定支持手段21,22,23,24として、真空雰囲気とされるチャンバ(図示略)内での体積を削減し、特に、ステージLの厚さ方向において、回転支持軸2xの長さ寸法H2xのみの構成とすることができるので、ステージLとベースBとの間隔を極めて小さくして省スペース化を図り、ステージ支持に必要な高さをほとんど設けない程度に小さくすることが可能となる。
具体的に、本実施形態におけるステージLの移動状態とそのときのモータ回転状態を示す。
本実施形態においては、図11に示すように、初期状態を中央位置、かつ傾き無し(s0=0)とする。
このときの、モータmの回転角は、ステージLの一辺である位置姿勢設定支持手段21から位置姿勢設定支持手段22に向かう方向を基準とする、つまり、平面視して図11の右向き方向となる位置を0度とし、反時計まわりに数えて、それぞれ(度)でおよそ、
モータ角度sm1;315度
モータ角度sm2;225度
モータ角度sm3;135度
モータ角度sm4;45度
となる。
このときの、モータmの回転角は、ステージLの一辺である位置姿勢設定支持手段21から位置姿勢設定支持手段22に向かう方向を基準とする、つまり、平面視して図11の右向き方向となる位置を0度とし、反時計まわりに数えて、それぞれ(度)でおよそ、
モータ角度sm1;315度
モータ角度sm2;225度
モータ角度sm3;135度
モータ角度sm4;45度
となる。
図12に示すように、図の上側位置、かつ傾き無し(s0=0)とする場合には、モータmの回転角は、それぞれ(度)でおよそ、
モータ角度sm1;345度
モータ角度sm2;205度
モータ角度sm3;105度
モータ角度sm4;75度
となる。
モータ角度sm1;345度
モータ角度sm2;205度
モータ角度sm3;105度
モータ角度sm4;75度
となる。
図13に示すように、図の右側位置、かつ傾き無し(s0=0)とする場合には、モータmの回転角は、それぞれ(度)でおよそ、
モータ角度sm1;345度
モータ角度sm2;255度
モータ角度sm3;105度
モータ角度sm4;15度
となる。
モータ角度sm1;345度
モータ角度sm2;255度
モータ角度sm3;105度
モータ角度sm4;15度
となる。
図14に示すように、図の下側位置、かつ傾き有り(s0=1度)とする場合には、モータmの回転角は、それぞれ(度)でおよそ、
モータ角度sm1;287度
モータ角度sm2;253度
モータ角度sm3;163度
モータ角度sm4;17度
となる。
モータ角度sm1;287度
モータ角度sm2;253度
モータ角度sm3;163度
モータ角度sm4;17度
となる。
以下、本発明に係るXYθステージ機構の第7実施形態を、図面に基づいて説明する。
図15は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのは位置姿勢設定支持手段31,32,33,34に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図15は、本実施形態におけるXYθステージ機構を模式的に示す平面図(a)、正面図(b)であり、図5に示す第2実施形態と異なるのは位置姿勢設定支持手段31,32,33,34に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態におけるXYθステージ機構は、図15に示すように、位置姿勢設定支持手段31,32,33,34がステージLの四辺中央付近に設けられている。
本実施形態における位置姿勢設定支持手段31,32,33,34はいずれも略同等の構成とされており、ステージLへの接続箇所およびベースBへの接続箇所が異なるのみである。
以下、位置姿勢設定支持手段31,32,33,34について説明するが、符号の下一文字を1,2,3,4とした場合、位置姿勢設定支持手段31,32,33,34のそれぞれに対応するように読み替えるものとする。
以下、位置姿勢設定支持手段31,32,33,34について説明するが、符号の下一文字を1,2,3,4とした場合、位置姿勢設定支持手段31,32,33,34のそれぞれに対応するように読み替えるものとする。
位置姿勢設定支持手段31は、ステージL表面に直交する駆動軸3m1を有するようにベースBに回転可能に設けられた回転軸3rx1と、この回転軸3rx1から径方向長さ一定としてその一端が固定される回転リンク部3rm1と、回転リンク部3rm1の他端に設けられた駆動軸3m1と、駆動軸3m1を介して接続されたモータmと、モータmを並進可能にステージLに接続する接続部3q1とを有する。接続部3q1は、ガイドレールとこのガイドレールに沿ってモータを移動可能に接続する回転支持軸とを有する構成とされる。また、ベースBからステージLに向かって、回転軸3rx1、回転リンク部3rm1、駆動軸3m1(モータm)、接続部3q1、の順に位置するよう積み重ねられている。
位置姿勢設定支持手段31,32,33,34は、同様の構成とされるが、位置姿勢設定支持手段31,33は図示上下方向に並進可能に設けられ、位置姿勢設定支持手段32,34は、これと直交する図示左右方向に並進可能に設けられている。
位置姿勢設定支持手段31,32,33,34は、同様の構成とされるが、位置姿勢設定支持手段31,33は図示上下方向に並進可能に設けられ、位置姿勢設定支持手段32,34は、これと直交する図示左右方向に並進可能に設けられている。
位置姿勢設定支持手段31,32,33,34は、第1回転軸3mx1と駆動軸3m1とにおいて、回転リンク部3rm1とベースBが接続され、接続部3q1によりステージLとリニアに移動可能かつ回転自在に接続されているので、モータmによって駆動軸3m1を回転させることで、回転リンク部3rm1が回動して所定の位置まで回転する。同時に、接続部3q1が規制された線上で所定位置まで移動する。これにより、ステージLをXYθ方向へ移動させる。
本実施形態においては、第2実施形態と同様に、ステージLをベース(基台)Bに支持する4つの位置姿勢設定支持手段31,32,33,34が設けられ、これら4つのモータ角度sm1,sm2,sm3,sm4を設定するだけで、XY方向の並進移動((Δxp0,Δyp0)に相当)、および、XY平面内での回転量θ(Δs0に相当)を制御してに任意に動作させることができる。
なお、本実施形態においては、モータmの替わりに、接続部3q1において直線駆動するリニアモータとすることも可能である。
以下、本発明に係るXYθステージ機構の第8実施形態を、図面に基づいて説明する。
図16は、本実施形態におけるXYθステージ機構を模式的に示す斜視図であり、図17は、同平面図であり、図9,図10に示す第6実施形態と異なるのは位置姿勢設定支持手段42,42,43の配置に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
図16は、本実施形態におけるXYθステージ機構を模式的に示す斜視図であり、図17は、同平面図であり、図9,図10に示す第6実施形態と異なるのは位置姿勢設定支持手段42,42,43の配置に関する点であり、それ以外で対応する構成には同一の符号を付してその説明を省略する。
本実施形態における位置姿勢設定支持手段41,42,43は図9,図10に示す第6実施形態における位置姿勢設定支持手段21,22,23,24と同等の構成とされその説明は省略する。
本実施形態におけるXYθステージ機構は、図16,図17に示すように、位置姿勢設定支持手段41,42,43が平面視して正三角形となるようにステージLの三方位置に設けられている。
本実施形態によれば、3つの位置姿勢設定支持手段41,42,43により効率的にかつ高精度に位置姿勢制御をおこなうことができる。これにより、例えば分析装置のステージ等、極めて精密な位置制御を要求されるXYθステージ機構に用いて好適である。
なお、本実施形態においては、図18に示すように、位置姿勢設定支持手段41,42,43には、Z方向制御機構(Z変位手段+チルト手段)を載置することが可能である。Z方向制御機構は、ステージLのZ方向位置制御およびステージ面の傾き2軸分、合計3自由度の駆動機構とされている。これによりステージの動作機構は最大6自由度の駆動が実現でき、適用範囲を広げることができる。
本実施形態におけるZ方向制御機構51,52,53は、図9,図10に示す第6実施形態における位置姿勢設定支持手段20の軸方向を水平方向(ステージ面内方向)としたものを、各々平行でない向きに載置した構成としている。
本実施形態におけるZ方向制御機構51,52,53は、図9,図10に示す第6実施形態における位置姿勢設定支持手段20の軸方向を水平方向(ステージ面内方向)としたものを、各々平行でない向きに載置した構成としている。
Z方向制御機構51,52,53は、図18に示すように、モータの駆動回転軸をステージ面に平行に設置した形態となっている。上部のステージLとは前述の位置姿勢設定支持手段21,22,23,24と同様に、各々2リンクを介して接続されている。これらの各々のリンク機構はステージ側から見たときに、ステージ面に対して垂直な軸まわりに回転する自由度、前述のステージ面に対して垂直な軸に交わり直交する軸に対する回転自由度、前述の2軸に各々直交する回転自由度、モータ軸に平行な2リンク機構、の自由度をもって接続されている。
これにより、ステージ面のチルト角を制御して、ステージ面方向を維持し昇降、あるいは所定角度へ傾ける制御が可能となる。
10…XYθステージ機構、L…ステージ、B…ベース、C…チャンバ、11,12,13,14、20,21,22,23,24,31,32,33,34,41,42,43…位置姿勢設定支持手段、m1…駆動軸、rm1…回転リンク部、m…モータ、r1…接続部、x1…第1回転軸、p1…第2回転軸、2m,2x,2p…円柱部分、2rm,2r…端部、m0,p0,x0…中心軸線、sm1,sm2,sm3,sm4…モータ角度。
Claims (14)
- 一面内を移動可能とされるステージを有し、該ステージの面内方向内の位置および姿勢決め制御を可能とするXYθステージ機構であって、
前記ステージの位置および姿勢を設定する位置姿勢設定支持手段が3箇所以上設けられて前記ステージを支持し、
前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、前記駆動軸に固定されて回動する回転リンク部と、該回転リンク部と前記ステージとを接続する接続部と、を有するものとされ、
前記回転リンク部の角度調節によって前記ステージの位置および位置を設定することを特徴とするXYθステージ機構。 - 前記位置姿勢設定支持手段は、前記ステージ面に直交する駆動軸を有する回転駆動源と、 前記駆動軸から径方向長さ一定に固定されて回動する回転リンク部と、
前記駆動軸と平行な第1回転軸で一端側が前記回転リンク部に接続されるとともに前記駆動軸と平行な第2回転軸で他端側が前記ステージに接続される長さ一定の接続部と、
を有するものとされることを特徴とする請求項1記載のXYθステージ機構。 - 前記位置姿勢設定支持手段においては、前記駆動軸と前記第2回転軸とが、前記ステージ面に対して互いに異なる高さ位置として前記ステージ面法線方向視して重なるように設けられる円柱部分を有し、これら前記駆動軸と前記第2回転軸とを貫通するように設けられる前記第1回転軸が円柱部分を有し、
前記第1回転軸と前記駆動軸、および前記第1回転軸と前記第2回転軸、における円柱部分の中心軸線がいずれも前記ステージ面内方向に離間することを特徴とする請求項2記載のXYθステージ機構。 - 前記位置姿勢設定支持手段が4箇所以上設けられることを特徴とする請求項1から3のいずれか1項に記載のXYθステージ機構。
- 前記位置姿勢設定支持手段には、回転駆動されないものを有することを特徴とする請求項4に記載のXYθステージ機構。
- 前記位置姿勢設定支持手段は、前記接続部が前記ステージ面内方向に直線方向動作可能な位置規制部で前記ステージに接続されることを特徴とする請求項1記載のXYθステージ機構。
- 前記位置姿勢設定支持手段として、前記ステージ面内方向に直線動作のみの位置規制部であるステージ支持手段が設けられていることを特徴とする請求項1から5のいずれか1項に記載のXYθステージ機構。
- 昇降1軸+2軸のチルト機構を有するZ方向制御機構を追加することで、4〜6自由度の動作が可能とされていることを特徴とする請求項1から7のいずれか1項に記載のXYθステージ機構。
- 前記ステージが真空または減圧雰囲気下に設置されることを特徴とする請求項1から8のいずれか1項に記載のXYθステージ機構。
- 前記駆動源が真空または減圧雰囲気下に設置されることを特徴とする請求項9記載のXYθステージ機構。
- 前記ステージが大気圧、および大気圧に対して陽圧の雰囲気下に設置されることを特徴とする請求項1から8のいずれか1項に記載のXYθステージ機構。
- 前記駆動源が大気圧、および大気圧に対して陽圧の雰囲気下に設置されることを特徴とする請求項11記載のXYθステージ機構。
- 前記駆動源が真空シール機構を介して大気側に設置されることを特徴とする請求項9記載のXYθステージ機構。
- 前記駆動源が気密シール機構を介して大気側に設置されることを特徴とする請求項11記載のXYθステージ機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142266A JP2014006162A (ja) | 2012-06-25 | 2012-06-25 | XYθステージ機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142266A JP2014006162A (ja) | 2012-06-25 | 2012-06-25 | XYθステージ機構 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014006162A true JP2014006162A (ja) | 2014-01-16 |
Family
ID=50104014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012142266A Pending JP2014006162A (ja) | 2012-06-25 | 2012-06-25 | XYθステージ機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014006162A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102060323B1 (ko) * | 2018-03-13 | 2019-12-30 | 주식회사 에스에프에이 | 4축 얼라인 스테이지 시스템 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08118171A (ja) * | 1994-10-20 | 1996-05-14 | Toppan Printing Co Ltd | 水平移動テーブル |
| JPH09243766A (ja) * | 1996-03-05 | 1997-09-19 | Dainippon Screen Mfg Co Ltd | アライメントステージ |
| JP2000054130A (ja) * | 1998-08-07 | 2000-02-22 | Matsushita Electric Ind Co Ltd | ロードロック室及び真空処理装置 |
| JP2002015985A (ja) * | 1999-12-21 | 2002-01-18 | Asm Lithography Bv | リソグラフィ投影装置に使うための平衡位置決めシステム |
-
2012
- 2012-06-25 JP JP2012142266A patent/JP2014006162A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08118171A (ja) * | 1994-10-20 | 1996-05-14 | Toppan Printing Co Ltd | 水平移動テーブル |
| JPH09243766A (ja) * | 1996-03-05 | 1997-09-19 | Dainippon Screen Mfg Co Ltd | アライメントステージ |
| JP2000054130A (ja) * | 1998-08-07 | 2000-02-22 | Matsushita Electric Ind Co Ltd | ロードロック室及び真空処理装置 |
| JP2002015985A (ja) * | 1999-12-21 | 2002-01-18 | Asm Lithography Bv | リソグラフィ投影装置に使うための平衡位置決めシステム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102060323B1 (ko) * | 2018-03-13 | 2019-12-30 | 주식회사 에스에프에이 | 4축 얼라인 스테이지 시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8424411B2 (en) | Parallel robot | |
| JP4656334B2 (ja) | アライメント装置 | |
| EP2705934A2 (en) | A method and a device for change of rigidity of a serial or parallel basic movable mechanism, especially of industrial robots and machining machines | |
| JP2014034107A (ja) | 産業用ロボットの原点位置復帰方法および産業用ロボット | |
| CN110712195A (zh) | 运送机器人和机器人系统 | |
| ES2653554T3 (es) | Sistema de ajuste para alinear elementos ópticos o muestras en vacío | |
| KR100971586B1 (ko) | 얼라이먼트 장치 및 얼라이먼트 장치의 원점 복귀 방법,얼라이먼트 장치를 구비한 선회 테이블, 병진 테이블, 기계및 기계 제어 시스템 | |
| WO2005001844A1 (ja) | 支持ユニット並びにその支持ユニットを用いた移動テーブル装置及び直動案内装置 | |
| JP2948216B1 (ja) | 複数軸動力伝達装置およびウエハ搬送用アームリンク | |
| TW201621916A (zh) | 可調整角度之多軸承載裝置 | |
| JP2014006162A (ja) | XYθステージ機構 | |
| KR20150060982A (ko) | 이동체 장치, 노광 장치, 및 디바이스 제조 방법 | |
| JPWO2011055826A1 (ja) | マスク保持機構 | |
| JP4826149B2 (ja) | 長ストローク移動可能なアライメントステージ | |
| JP5751873B2 (ja) | 空気ばねアクチュエータ及び除振装置 | |
| CN1293693C (zh) | 多自由度电机 | |
| JP2006215950A (ja) | 並進駆動・並進・回転自由度機構装置およびこれを用いた2次元位置決め装置 | |
| JP2004156679A (ja) | 多自由度微動位置決め装置 | |
| JP4742663B2 (ja) | アライメント装置 | |
| JP2638946B2 (ja) | 位置決め装置 | |
| JP2010163692A (ja) | 真空蒸着用アライメント装置 | |
| JP2006237485A (ja) | アライメント装置 | |
| JP4971000B2 (ja) | 位置決め基台 | |
| CN116687572B (zh) | 用于核磁兼容微创手术机器人的柔性体机械臂机构 | |
| JP6053991B2 (ja) | 位置決め装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160906 |