JP2014008073A - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP2014008073A JP2014008073A JP2012144266A JP2012144266A JP2014008073A JP 2014008073 A JP2014008073 A JP 2014008073A JP 2012144266 A JP2012144266 A JP 2012144266A JP 2012144266 A JP2012144266 A JP 2012144266A JP 2014008073 A JP2014008073 A JP 2014008073A
- Authority
- JP
- Japan
- Prior art keywords
- sewing
- specified
- designated
- pattern
- embroidery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B19/00—Program-controlled sewing machines
- D05B19/02—Sewing machines having electronic memory or microprocessor control unit
- D05B19/12—Sewing machines having electronic memory or microprocessor control unit characterised by control of operation of machine
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05C—EMBROIDERING; TUFTING
- D05C5/00—Embroidering machines with arrangements for automatic control of a series of individual steps
- D05C5/02—Embroidering machines with arrangements for automatic control of a series of individual steps by electrical or magnetic control devices
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
【課題】縫製対象物上の任意の位置の指定状況をユーザが容易に確認できるミシンを提供すること。
【解決手段】ミシンは、縫製対象物上の任意の位置である指定位置を表す情報を取得する(S8,S14,S20)。ミシンは、位置指定手段が指定した縫製対象物上の指定位置を特定する(S9,S15,S21)。特定された指定位置に基づき、視認可能な標識を縫製対象物上に投影する(S25)。本態様のミシンによれば、ユーザは、標識によって、縫製対象物上の指定位置の指定状況を容易に把握することができる。指定位置と、標識が投影される位置とは、共に縫製対象物上にある。本態様のミシンは、両者が離れている場合に比べ、指定位置の指定状況が確認しやすい。
【選択図】図11
【解決手段】ミシンは、縫製対象物上の任意の位置である指定位置を表す情報を取得する(S8,S14,S20)。ミシンは、位置指定手段が指定した縫製対象物上の指定位置を特定する(S9,S15,S21)。特定された指定位置に基づき、視認可能な標識を縫製対象物上に投影する(S25)。本態様のミシンによれば、ユーザは、標識によって、縫製対象物上の指定位置の指定状況を容易に把握することができる。指定位置と、標識が投影される位置とは、共に縫製対象物上にある。本態様のミシンは、両者が離れている場合に比べ、指定位置の指定状況が確認しやすい。
【選択図】図11
Description
本発明は、投影手段を備えるミシンに関する。
従来、所望の刺繍模様を縫製する縫製位置及び縫製角度を、加工布上に容易に設定することができるミシンが公知である。例えば特許文献1に記載されたミシンは、撮影手段を備えており、ユーザは加工布の指定位置に標識を貼付した後、撮影手段で標識を撮影する。そして、ミシンは、撮影された標識の画像に基づいて、刺繍模様の縫製位置及び縫製角度を自動で設定する。
上述のミシンでは、一旦加工布から標識を剥離させてしまうと、ユーザは縫製位置及び縫製角度がどのように設定されたかを加工布上で確認することができない。
本発明の目的は、縫製対象物上の任意の位置の指定状況をユーザが容易に確認できるミシンを提供することである。
本発明の一態様に係るミシンは、縫製対象物上の任意の位置である指定位置を表す情報を取得する位置取得手段と、前記位置取得手段が取得した前記情報が表す前記縫製対象物上の前記指定位置を特定する位置特定手段と、前記位置特定手段によって特定された前記指定位置に基づき、視認可能な標識を前記縫製対象物上に投影する投影手段とを備えている。本態様のミシンによれば、ユーザは、標識によって、縫製対象物上の指定位置の指定状況を容易に把握することができる。指定位置と、標識が投影される位置とは、共に縫製対象物上にある。したがって本態様のミシンは、両者が離れている場合に比べ、指定位置の指定状況を確認しやすい。
本態様に係るミシンは、前記縫製対象物に縫目を形成する縫製手段と、前記縫製対象物に縫製を行う刺繍模様を特定する模様特定手段と、前記模様特定手段によって特定された前記刺繍模様を縫製するための条件である縫製条件を、前記位置特定手段が特定した前記指定位置に基づき設定する設定手段と、前記縫製手段を制御して、前記設定手段によって設定された前記縫製条件に基づき、前記模様特定手段が特定した前記刺繍模様を、前記縫製対象物に縫製する縫製制御手段とをさらに備え、前記投影手段は、前記位置特定手段によって特定された前記指定位置に基づき、前記設定手段によって設定された前記縫製条件を表す前記標識を前記縫製対象物上に投影してもよい。この場合のミシンでは、ユーザは、ユーザが指定した指定位置を表す情報をミシンに取得させることによって、刺繍模様の縫製条件を設定することができる。ユーザは、縫製対象物上に投影された標識によって、縫製条件の指定状況を把握することができる。
本態様に係るミシンにおいて、前記設定手段は、前記縫製条件として前記刺繍模様の縫製位置を、前記位置特定手段が特定した前記指定位置に基づき設定してもよい。この場合のミシンでは、ユーザは、位置指定手段を用いて縫製対象物上の任意の位置を指定することによって、刺繍模様の縫製位置を設定することができる。ユーザは、縫製対象物上に投影された標識によって、縫製位置の指定状況を容易に把握することができる。
本態様に係るミシンにおいて、前記位置特定手段が、前記指定位置を複数特定した場合、前記設定手段は、前記縫製条件として、前記模様特定手段によって特定された前記刺繍模様の前記縫製位置に加え、前記刺繍模様の角度及び大きさの少なくともいずれかを設定してもよい。この場合のミシンでは、ユーザは、位置指定手段を用いて縫製対象物上の任意の位置を指定することによって、刺繍模様の縫製位置に加え、刺繍模様の角度及び大きさの少なくともいずれかを設定することができる。ユーザは、縫製対象物上に投影された標識によって、縫製条件の指定状況を容易に把握することができる。
本態様に係るミシンにおいて、前記投影手段は、前記設定手段が複数種類の前記縫製条件を設定した場合に、前記複数種類の前記縫製条件のそれぞれを表す前記標識を前記縫製対象物上に投影してもよい。この場合のミシンでは、ユーザは、縫製対象物上に投影された標識によって、複数種類の縫製条件のそれぞれの指定状況を容易に把握することができる。
本態様に係るミシンにおいて、前記設定手段は、前記位置特定手段によって特定される前記指定位置が変更された場合に、前記刺繍模様の前記縫製条件を再設定し、前記投影手段は、前記位置特定手段によって特定される前記指定位置が変更された場合に、前記位置特定手段によって特定された変更後の前記指定位置に基づき、前記設定手段が再設定した前記縫製条件を表す前記標識を前記縫製対象物上に投影してもよい。この場合のミシンでは、ユーザは、位置特定手段を用いて指定位置を指定することによって、縫製条件の微調整を、容易に行うことができる。ユーザは、縫製対象物上に投影された標識を見ながら、所望とする縫製条件を容易に設定することができる。
以下、本発明を具現化した第1及び第2実施形態について、図面を参照して順に説明する。なお、これらの図面は、本発明が採用しうる技術的特徴を説明するために用いられるものであり、記載されている装置の構成等は、単なる説明例である。
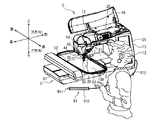
図1から図6を参照し、第1及び第2実施形態のミシン1に共通する物理的構成について説明する。図2の紙面手前側、紙面奥行き側、上側、下側、左側、及び右側を、それぞれミシン1の前側、後側、上側、下側、左側、及び右側と定義する。
ミシン1は、ベッド部11,脚柱部12,及びアーム部13を備える。ベッド部11は、ミシン1の土台部であり、左右方向に延びる。脚柱部12は、ベッド部11の右端部から上方へ延びる。アーム部13は、ベッド部11に対向して脚柱部12の上端から左方へ延びる。アーム部13の左先端は、頭部14である。ベッド部11の上面には、針板34が配設されている。針板34の下側(つまり、ベッド部11内)には、送り歯(図示せず)、送り機構(図示せず)、釜機構(図示せず)、及び送り量調整用モータ83(図7参照)が設けられている。送り歯は、送り機構によって駆動されて、縫製対象物(例えば、加工布)を所定の送り量で移送する。送り歯の送り量は、送り量調整用モータ83によって調整される。
頭部14の下端部から、針棒29及び押え棒31が下方に延びる。針棒29の下端には、縫針28が交換可能に装着される。押え棒31の下端には、押え足30が交換可能に装着される。押え足30は、縫製対象物100を押える。頭部14には、縫製対象物に縫目を形成する縫製機構89(図7参照)として、針棒機構(図示せず)、針振り機構(図示せず)、及び針振りモータ80(図7参照)等が設けられている。針棒機構は、針棒29を上下方向に駆動させる。針棒機構は、ミシンモータ79(図7参照)によって駆動される。針振り機構は、針棒29を左右方向に揺動させる。針振り機構は、針振りモータ80によって駆動される。
頭部14の下端の後部には、受信器94,95が設けられている。受信器94と受信器95とは、同一の構成を有する。受信器94は、頭部14の左下端、且つ、頭部14の下側面の後方に設けられている。受信器95は、頭部14の右下端、且つ、頭部の下側面の後方に設けられている。受信器94,95は、頭部14の左右方向の長さ分、左右に離間する。受信器94,95は超音波を検出する。受信器94,95の詳細は後述する。
頭部14の左前部には、画像を縫製対象物100上に投影するプロジェクタ40が取り付けられている。プロジェクタ40の大部分は頭部14の内部に収容されており、図2に示すように一対の調節ネジ44が頭部14の外部に突出している。調節ネジ44は、投影される画像(「投影画像」という。)のサイズ及び焦点をそれぞれ調整するネジである。プロジェクタ40は、ベッド部11の所定の投影範囲Qに、画像を投影する。プロジェクタ40の詳細は後述する。
アーム部13は、開閉可能なカバー16を上部に備える。カバー16の下方、つまりアーム部13内の略中央部に、糸駒20が収容される。糸駒20に巻回された上糸(図示せず)は、糸駒20から、頭部14に設けられた糸掛部(図示せず)を経由して、針棒29に装着された縫針28に供給される。アーム部13の前面下部に、開始・停止スイッチを含む複数の操作スイッチ21が設けられている。
脚柱部12の前面に液晶ディスプレイ(以下、LCDという)15が設けられている。LCD15には、コマンド、イラスト、設定値、メッセージ等の様々な項目を含む画像が表示される。LCD15の前面側に、タッチパネル26が設けられている。ユーザが、指や専用のタッチペンを用いてタッチパネル26の押圧操作を行うと(以下、この操作を「パネル操作」という。)、タッチパネル26によって検知される押圧位置に対応して、どの項目が選択されたかが認識される。ユーザは、このようなパネル操作によって、縫製したい模様及び実行すべきコマンドを選択できる。
脚柱部12の右側面には、コネクタ38,39が設けられている。コネクタ39には、メモリーカード等の外部記憶装置(図示せず)を接続することができる。ミシン1は、コネクタ39に接続された外部記憶装置から、刺繍模様のデータ及び各種プログラムを取り込む。コネクタ38には、コネクタ916を接続可能である。コネクタ916には、超音波ペン91(後述)から延びるケーブル912が連結されている。ミシン1は、コネクタ38,コネクタ916,及びケーブル912を介して超音波ペン91に電力を供給すると共に、超音波ペン91から出力される電気信号を取得する。
ミシン1はさらに刺繍装置2を備える。刺繍装置2は、ミシン1のベッド部11に対して着脱可能である。刺繍装置2がミシン1に装着されると、刺繍装置2とミシン1とは電気的に接続される。刺繍装置2とミシン1とは電気的に接続された場合、刺繍装置2は、ミシン1の縫製機構89(図7参照)の一部として機能する。刺繍装置2は、本体部51,及びキャリッジ52を備える。
キャリッジ52は、本体部51の上側に設けられている。キャリッジ52は、前後方向に長い直方体形状である。キャリッジ52は、枠ホルダ55,Y軸移送機構(図示せず)、及びY軸モータ87(図7参照)を備える。枠ホルダ55は、刺繍枠53(図1参照)を着脱可能である。図示しないが、刺繍枠は大きさや形状が異なる複数種類が用意されている。枠ホルダ55は、キャリッジ52の右側面に設けられている。図1に示すように、刺繍枠53は、詳しく図示しないが、内枠と外枠とで縫製対象物100を挟持して保持する周知構成のものである。刺繍枠53に保持された縫製対象物100は、ベッド部11の上側、且つ、針棒29及び押え足30の下方に配置される。Y軸移送機構は、枠ホルダ55を前後方向(Y方向)に移送する。刺繍枠53は、枠ホルダ55が前後方向に移送されることにより、縫製対象物100を前後方向に移送する。Y軸モータ87は、Y軸移送機構を駆動する。ミシン1のCPU61(図1参照)は、Y軸モータ87を制御する。
本体部51は、キャリッジ52を左右方向(X方向)に移送するX軸移送機構(図示せず)及びX軸モータ86(図7参照)を内部に備える。刺繍枠53は、キャリッジ52が左右方向に移送されることによって、縫製対象物100を左右方向に移送する。X軸モータ86は、X軸移送機構を駆動する。ミシン1のCPU61は、X軸モータ86を制御する。
超音波ペン91について説明する。超音波ペン91は、ペン本体910及びペン先911を備える。ペン本体910の形状は棒状である。ペン先911は、ペン本体910の先端側に設けられている。ペン先911の先端は尖っている。通常、ペン先911はペン本体910から外側に僅かに突出した突出位置にある。一方、ペン先911に対してペン本体910側に向かう方向の力が作用すると、ペン先911はペン本体910に入り込む。そして、ペン先911に作用している力が無くなると、ペン先911は元の突出位置に戻る。
超音波ペン91は、ペン本体910の内部に、スイッチ913(図7参照)、信号出力回路914(図7参照)、及び超音波発信器915(図7参照)を備える。スイッチ913は、ペン先911の位置に応じてON/OFFを切り替える。スイッチ913は、信号出力回路914及び超音波発信器915の出力状態を切り替える。
ペン先911に力が作用していないとき(ペン先911が突出位置のとき)、スイッチ913はOFF状態である。スイッチ913がOFF状態のときには、信号出力回路914は電気信号を出力せず、超音波発信器915は超音波を発信しない。一方、ユーザが縫製対象物100上の任意の位置にペン先911を押し当てることによって、ペン先911に力が作用する。このとき、ペン先911はペン本体910に入り込んで、スイッチ913がON状態になる。スイッチ913がON状態になると、信号出力回路914はケーブル912を介してミシン1に電気信号を出力し、超音波発信器915は超音波を発信する。
なお詳細は後述するが、ミシン1は、超音波ペン91から発信された超音波を、受信器94,95で検出(受信)する。ミシン1は、検出された超音波に基づいて、超音波の発信源、すなわち、超音波ペン91に設けられた超音波発信器915の位置を特定する。ミシン1は、特定された位置に基づいて、刺繍模様の縫製条件を設定し、縫製を行う。
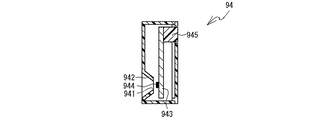
図3から図5を参照して、受信器94及び95について説明する。受信器95は、受信器94と同一構成であるので説明を省略する。図2の紙面左下側、右上側、左上側、右下側、上側、及び下側を、それぞれ受信器94の前側、後側、左側、右側、上側、及び下側とする。
図3及び図4に示すように、受信器94の形状は、上下方向にやや長い直方体形状である。受信器94は、前面の下端部の中央に開口部941を備える。開口部941の形状は、左右方向に長い楕円形である。開口部941の周囲942は、外側程拡大するテーパ面(傾斜面)である。図4に示すように、受信器94の内部には、電気基板943及びマイク944を備える。マイク944は、開口部941の内側に位置する。電気基板943の上端の後面に、コネクタ945が実装される。コネクタ945は、ミシン1に設けられたコネクタ(図示せず)に接続する。受信器94の指向性は、マイク944に対する開口部941の向きで定まる。
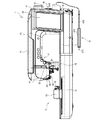
図6を参照して、プロジェクタ40について説明をする。図6のように、プロジェクタ40は、筐体45と、光源46と、液晶パネル47と、結像レンズ48とを備えている。本実施形態では、筐体45は筒状に形成されている。筐体45は、針穴32(図8参照)近傍がその軸線上に位置するように、下方に向かって後方且つ右方へ傾斜する姿勢で、頭部14内の機枠に固定されている。光源46としては、例えば、メタルハライド系の放電ランプを採用することができる。液晶パネル47は、光源46からの光を変調し、投影画像を表す画像データに基づき、投影される画像の画像光を形成する。結像レンズ48は、筐体45に設けられた投光用開口部49を通して、液晶パネル47によって形成された画像光を、投影範囲Q(図1参照)に結像させる。本実施形態では、プロジェクタ40は、刺繍模様の縫製条件を示す標識の画像を投影可能である。詳しい説明は省略するが、プロジェクタ40は、縫製対象物に対して斜め上方から投影画像を投影するので、投影画像には画像の歪みを補正する処理がされているものとする。また、プロジェクタ40の投影画像の座標系と、空間全体の座標系(以下、「ワールド座標系」ともいう。)とは予め関連づけられている。このため、ワールド座標系で表される座標に基づき、プロジェクタ40の画像データを修正することが可能である。
図7を参照して、第1及び第2実施形態のミシン1に共通するミシン1の電気的構成について説明する。ミシン1の制御部60は、CPU61,ROM62,RAM63,EEPROM64,及び入出力インターフェイス65を備える。CPU61,ROM62,RAM63,EEPROM64,及び入出力インターフェイス65は、バス67を介して相互に電気的に接続する。ROM62には、CPU61が後述するメイン処理を実行するためのプログラムを含む各種プログラム、及びデータ等が記憶される。EEPROM64には、ミシン1が刺繍模様を縫製するための複数種類の模様のデータ、及びプロジェクタ40の投影画像の画像データを生成するための各種パラメータ等が記憶される。
入出力インターフェイス65には、操作スイッチ21,タッチパネル26,光源46,及び駆動回路71,72,74,75,76,82,84,85が電気的に接続されている。駆動回路71,72,74,75は、それぞれ、送り量調整用モータ83,ミシンモータ79,針振りモータ80,及びLCD15を駆動する。駆動回路76は、受信器94及び95を駆動する。駆動回路76には、受信器94,95で検出された超音波の信号を増幅してCPU61に伝達する増幅回路が含まれる。駆動回路82,84,85は、それぞれ、プロジェクタ40の液晶パネル47,X軸モータ86並びにY軸モータ87を駆動する。
超音波ペン91の電気的構成について説明する。超音波ペン91は、スイッチ913,信号出力回路914,及び超音波発信器915を備える。スイッチ913は、信号出力回路914及び超音波発信器915と電気的に接続する。信号出力回路914は、入出力インターフェイス65に電気的に接続可能である。信号出力回路914は、入出力インターフェイス65を介してCPU61に電気信号を出力可能である。
図1及び図8を参照して、ユーザが超音波ペン91で指定した縫製対象物100上の位置を特定する方法について説明する。ユーザは、超音波ペン91のペン先911を縫製対象物100に押し当てることによって、縫製対象物100上の任意の位置を指定する。以下、超音波ペン91のペン先911が押し当てられた縫製対象物100上の位置を、指定位置ともいう。本実施形態での指定位置は、縫製対象物100を保持する刺繍枠53が刺繍装置2に装着された状態において、刺繍枠53の内側、且つ、プロジェクタ40の投影範囲Qの内側にあるものとする。なお後述するように、ミシン1は、超音波の発信源の位置を特定することによって指定位置を特定する。このため厳密には、ペン先911が押し当てられた縫製対象物100上の位置ではなく、超音波ペン91に設けられた超音波発信器915の位置が特定される。しかしながら、ペン先911と超音波発信器915とは非常に近接して配置されている。このため、超音波発信器915の位置を、ペン先911が押し当てられた縫製対象物100上の位置、すなわち指定位置として見做すことができる。以下、ミシン1の左右方向、前後方向、及び上下方向を、それぞれX方向、Y方向、及びZ方向とする。図8の左右方向及び上下方向が、それぞれ、X方向及びY方向に相当し、紙面手前側から紙面奥行側の方向が、Z方向に相当する。
ミシン1は、指定位置をワールド座標系の3次元の座標情報(X座標、Y座標、及びZ座標)として特定する。ここで、ワールド座標系の原点(0,0,0)は、針穴32の中心点である。針穴32は、針板34(図1参照)に形成され、縫針28が挿通する穴である。Z座標が0である面が、針板34の上面を示す。受信器94のマイク944の位置を示す座標Bを、(Xb,Yb,Zb)とする。受信器95のマイク944の位置を示す座標Cを、(Xc,Yc,Zc)とする。指定位置を示す座標Eを、(Xe,Ye,Ze)とする。受信器94,95のZ座標は、針板34の上面に対する受信器94,95のマイク944の高さを表す。座標B(Xb,Yb,Zb)及び座標C(Xc,Yc,Zc)は、ROM62に予め記憶される。以下、座標Eを「指定座標E」ともいう。指定座標Eと座標Bとの間の距離を「距離EB」といい、指定座標Eと座標Cとの間の距離を「距離EC」という。
距離EB、ECは、三平方の定理に基づき、座標B、C、Eによって表すことができる。距離EB、座標B、及び座標Eは、以下の式(1)の関係を満たす。同様に、距離EC、座標C、及び座標Eは、以下の式(2)の関係を満たす。
(Xb−Xe)2+(Yb−Ye)2+(Zb−Ze)2=(EB)2・・・(1)
(Xc−Xe)2+(Yc−Ye)2+(Zc−Ze)2=(EC)2・・・(2)
なお式(1)は、座標Bを中心点とし、指定座標Eを通る球面(半径:距離EB)の方程式と同一である。同様に(2)は、座標Cを中心点とし、座標Eを通る球面(半径:距離EC)の方程式と同一である。
(Xb−Xe)2+(Yb−Ye)2+(Zb−Ze)2=(EB)2・・・(1)
(Xc−Xe)2+(Yc−Ye)2+(Zc−Ze)2=(EC)2・・・(2)
なお式(1)は、座標Bを中心点とし、指定座標Eを通る球面(半径:距離EB)の方程式と同一である。同様に(2)は、座標Cを中心点とし、座標Eを通る球面(半径:距離EC)の方程式と同一である。
超音波が進行する速度を、音速Vとする。指定座標Eを指定した超音波ペン91から超音波が発信されてから、受信器94が超音波を検出するまでに要する時間を、伝達時間Tbとする。指定座標Eを指定した超音波ペン91から超音波が発信されてから、受信器95が超音波を検出するまでに要する時間を、伝達時間Tcとする。この場合、距離EB、ECは、以下の式(3)及び(4)で表すことができる。
EB=V×Tb・・・(3)
EC=V×Tc・・・(4)
EB=V×Tb・・・(3)
EC=V×Tc・・・(4)
上記式(1)及び(2)に式(3)及び(4)を代入することによって、以下の式(5)及び(6)が得られる。
(Xb−Xe)2+(Yb−Ye)2+(Zb−Ze)2=(V×Tb)2・・・(5)
(Xc−Xe)2+(Yc−Ye)2+(Zc−Ze)2=(V×Tc)2・・・(6)
(Xb−Xe)2+(Yb−Ye)2+(Zb−Ze)2=(V×Tb)2・・・(5)
(Xc−Xe)2+(Yc−Ye)2+(Zc−Ze)2=(V×Tc)2・・・(6)
式(5)及び(6)のうち、座標B(Xb,Yb,Zb)、座標C(Xc,Yc,Zc)、及び音速Vは既知の値であり、ROM62に記憶されている。伝達時間Tb、Tcは、超音波ペン91の超音波発信器915から超音波が発信されたタイミング(以下、「発信タイミングT1」という。)、及び、受信器94,95において超音波が検出されたタイミング(以下、「検出タイミングT2b、検出タイミングT2c」という。)との差を算出することによって特定できる。本実施形態の刺繍装置2は、刺繍枠53をZ方向(ミシン1の上下方向)には移動させないので、縫製対象物100の厚みが無視できる範囲であれば、縫製対象物100の上面をZ=0としている。よって、式(5)及び(6)の連立方程式と、受信器94及び95の指向性とに基づき、指定座標E(Xe,Ye,Ze(=0))が算出される。
図9及び図10を参照して、刺繍模様200を例に、画面150,刺繍模様及び刺繍模様の模様データについて説明する。図9の画面150は、後述するメイン処理が実行される過程でLCD15に表示される画面である。ユーザは、EEPROM64に記憶されている複数の刺繍模様の中から、パネル操作によって所望の刺繍模様を選択可能である。画面150は、刺繍模様表示欄151,糸色表示欄152及び設定画面153を含む。刺繍模様表示欄151は、選択中の刺繍模様200を表示する。糸色表示欄152は、選択中の刺繍模様200を縫製するために使用される糸の色及び縫製に必要な時間を表示する。刺繍模様200は、糸色表示欄152に示される複数色の糸で縫製される刺繍模様である。刺繍模様200を縫製するための模様データは、刺繍座標系の座標データを含む。刺繍座標系は、キャリッジ52を移動させるX軸モータ86及びY軸モータ87の座標系である。模様データは、刺繍模様の初期配置及び初期の大きさを規定する。刺繍模様200の初期の縫製位置は、刺繍模様200が内接する最小の矩形を刺繍領域201とし、図10に示すように刺繍領域201の中心点206が縫製領域54の中心点56と一致するように設定されている。刺繍模様200の初期の縫製角度は、刺繍領域201の点202から点203に向かうベクトルの向きが、刺繍枠53の左から右に向かう方向と一致する角度である。刺繍模様200の初期の大きさは、刺繍領域201の大きさによって表される。刺繍座標系の模様データの座標データは、縫製対象物100に対する刺繍模様の配置が変更された場合に適宜修正される。本実施形態では、刺繍座標系とワールド座標系とは予め関連づけられている。したがってミシン1は、ワールド座標系で表される指定座標を利用した、刺繍模様の縫製条件を変更する指示に基づき、刺繍模様系で表される座標データを修正することができる。
図9を参照して、第1実施形態のミシン1において実行されるメイン処理の概要について説明する。メイン処理は、ユーザが選択した刺繍模様の縫製条件を、必要に応じて縫製対象物100上の指定位置に基づき設定変更し、刺繍模様を縫製する処理である。第1実施形態の縫製条件は、刺繍模様の縫製位置、縫製角度、及び大きさの中から選択される。ユーザは、変更する縫製条件に応じた基準を選択後、所定の順序で指定位置を指定する。
ユーザによって刺繍模様200が選択された場合を例に、縫製条件の指定方法を説明する。まずユーザは、設定画面153を参照して、変更の対象となる縫製条件に応じた基準を選択する。設定画面153には、縫製位置、縫製角度、及び模様の大きさの基準を選択するための図形群360と、OKボタン381とを含む。図形群360は、刺繍領域201の頂点を表す点361から364と、刺繍領域201の辺の一部を表すブロック371から378と、刺繍領域201の中心点及び縫製角度を表す十字矢印379と、刺繍領域201の中心点を表す点380を含む。縫製条件として縫製位置を選択する場合、図形群360のうち、点361から364及び点380の中から1点を基準として選択する。縫製条件として縫製角度を選択する場合、図形群360のうち、ブロック371から378及び十字矢印379の中から1つを基準として選択する。縫製条件として模様の大きさを選択する場合、図形群360のうち、点361から364及び点380の中から2点を基準として選択する。第1実施形態では、選択された図形及び図形の数によって、変更の対象となる縫製条件が指定される。図形群360のうち、選択された図形は、色が変更される。図9では、ブロック371が選択され、色が白色から黒色に変更されている。黒色のブロック371は、変更の対象となる縫製条件が角度であることを表している。
次にユーザは、超音波ペン91を用いて変更の対象となる縫製条件に応じて指定位置を指定する。縫製位置は、位置指定位置を用いて指定される。位置指定位置は、縫製位置の基準が配置される位置を表す。縫製角度は、角度指定位置を用いて指定される。角度指定位置は、第1指定位置と第2指定位置とを含む。第1指定位置から第2指定位置に向かうベクトルは、基準が示すベクトルの向きを表す。基準が示すベクトルの向きは、縫製角度の基準としてブロックが選択された場合、ブロックが接する点を起点とするブロックが延伸する方向である。縫製角度の基準として十字矢印379が選択された場合、基準が示すベクトルの向きは、矢印が指し示す方向である。模様の大きさは、大きさ指定位置を用いて指定される。大きさ指定位置は、第1指定位置と第2指定位置とを含む。第1指定位置と第2指定位置とを結ぶ線分の長さは、基準として選択された2点を結ぶ線分の長さを表す。超音波ペン91を用いて縫製条件を変更する場合、ユーザはどのように縫製条件が変更されたかを把握することができない。そこでミシン1は、刺繍模様の縫製条件を表す標識を縫製対象物100上に投影し、縫製条件が変更された場合には、その変更内容を投影中の標識に反映させる。
図9から12を参照して、メイン処理を説明する。図11のメイン処理は、ユーザがパネル操作によって刺繍模様を選択した後、パネル操作によって開始の指示を入力した場合に実行される。メイン処理は、縫製対象物100が刺繍装置2に取り付けられた刺繍枠53に保持されている状態で開始される。図11のメイン処理を実行させるプログラムは、図7のROM62に記憶されており、CPU61が実行する。具体例として、ユーザによって選択された刺繍模様200の縫製条件を、図10の刺繍領域201で示す初期の縫製条件から、図10の刺繍領域301で示す条件に変更する場合について説明する。
図11に示すように、メイン処理では、ユーザが選択した刺繍模様200が特定され、刺繍模様200を縫製するための模様データがEEPROM64から取得され、取得された模様データはRAM63に記憶される(S1)。模様データは、刺繍模様200の初期の縫製条件を図10に示す刺繍領域201のように規定する。次に、設定画面153がLCD15に表示される(S3)。ミシン1では、設定変更をする縫製条件として、縫製位置、縫製角度及び模様の大きさのいずれかを一度に選択することができる。
次に標識の投影が開始される(S5)。S5ではまず、S1で特定された刺繍模様200の初期配置及び初期の大きさが模様データに基づき特定される。特定された初期の縫製条件を表す標識400を投影するためのデータが生成される。標識データは、公知の方法(例えば、特開2011−194043号公報参照)によって生成される。標識400は、複数の縫製条件のそれぞれを表す。標識400は、図12に示すように、標識401及び標識402を含む。標識401は、矩形状の図形である。標識401の外周は、初期の刺繍領域201(図10参照)を表す。標識402は、十字模様と矢印模様とを組み合わせた図形である。十字模様の部分の交点403は、刺繍領域201の中心点206を表す。標識402の矢印模様が指し示す方向は、刺繍模様200の上側の向き(点202から点205に向かう向き)を表す。ユーザは、縫製対象物100上に投影された標識400を目視で確認し、縫製条件の設定状況を確認する。標識400で示される縫製条件で刺繍模様を縫製してよい場合には、ユーザは、LCD15に表示された設定画面153のOKボタン381を選択する。標識400で示される縫製条件を変更したい場合には、ユーザは、LCD15に表示された図形群360を選択することによって、設定変更を希望する縫製条件を選択する。
設定画面153の点361が選択された場合、設定変更をする縫製条件として縫製位置が選択されたと判断され(S7:YES)、指定位置を表す情報が取得される(S8)。本実施形態では、指定位置を表す情報として、T1,T2b,及びT2cが取得される。ユーザが超音波ペン91を用いて指定位置302を指定した場合、ペン先911が押し当てられたタイミングで、超音波ペン91の信号出力回路914は、ケーブル912を介して電気信号を出力する。同時に、超音波ペン91の超音波発信器915は、超音波を発信する。CPU61は、超音波ペン91から出力された電気信号を、ケーブル912を介して検出する。CPU61は、電気信号を検出した時刻を、発信タイミングT1として取得する。CPU61は、発信タイミングT1を取得した後、受信器94,95を介して超音波を検出する。CPU61は、受信器94,95と、入出力インターフェイス65とを介して超音波を検出した時刻を、それぞれ検出タイミングT2b、T2cとして取得する。
次に、上述の連立方程式と、受信器94,95の指向性とに基づき、指定位置302の座標が位置指定位置の座標として特定される(S9)。次に、S9で特定された位置指定位置の座標に基づき、刺繍模様の縫製位置が設定される(S11)。具体例では、特定された指定位置302の座標で示される位置に、刺繍領域201の点202が配置される。次に、変更された縫製条件を、投影中の標識に反映する処理が実行される(S25)。具体的には、S9で特定された位置指定位置の座標に基づき、変更後の縫製条件を表す標識を投影するためのデータが生成され、生成されたデータに基づき、変更後の縫製条件を表す標識が縫製対象物に投影される。標識データは、公知の方法(例えば、特開2011−194043号公報参照)によって生成される。具体例では、図12に示すように、初期の刺繍領域201を平行移動した刺繍領域211に標識400が投影される(S25)。
設定画面153のブロック371が選択された場合、設定変更をする縫製条件として縫製角度が選択されたと判断され(S7:NO,S13:YES)、2つの指定位置を表す情報が取得される(S14)。ユーザによって指定位置302,303が順に指定された場合、2つの指定位置に対応する情報が、角度指定位置の第1指定位置302を表す情報及び第2指定位置303を表す情報として取得される。次に、S9と同様な方法で第1指定位置302及び第2指定位置303の座標が角度指定位置の座標として特定される(S15)。次に、S15で特定された角度指定位置の座標に基づき、刺繍模様200の縫製角度が設定される(S17)。具体例では、図12に示すように、刺繍領域の点202から点203に向かう結ぶベクトルと、特定された第1指定位置302から第2指定位置303に向かうベクトル305の向きとが一致するように、第1指定位置302を中心に刺繍領域201が回転される。これにより、刺繍領域211が第1指定位置302を中心に回転し、刺繍領域221となる。この場合S25では、刺繍領域221に標識400が投影される(S25)。
設定画面153の点361及び点363が選択された場合、設定変更をする縫製条件として模様の大きさが選択されたと判断され(S7:NO,S13:NO,S19:YES)、2つの指定位置を表す情報が取得される(S20)。ユーザによって指定位置302,304が順に指定された場合、2つの指定位置を表す情報は、大きさ指定位置の第1指定位置302を表す情報及び第2指定位置304を表す情報として取得される。次に、S9と同様な方法で各指定位置の座標が大きさ指定位置の座標として特定される(S21)。次に、S21で特定された大きさ指定位置の座標に基づき、刺繍模様の大きさが設定される(S23)。具体例では、図12に示すように、刺繍領域201の点204を、特定された第3指定位置303と一致するように、刺繍領域221が拡大され、刺繍領域301となる。この場合S25では、刺繍領域301に標識410が投影される(S25)。
設定変更をする縫製条件が選択されない場合(S7:NO,S13:NO,S19:NO)又はS25の次に、OKボタン381が選択されたか否かが判断される(S27)。OKボタン381が選択されていない場合(S27:NO)、処理はS7に戻る。OKボタン381が選択された場合(S27:YES)、標識の投影が終了される(S29)。次に、S1で特定された刺繍模様の縫製処理が実行される(S31)。縫製条件が変更された場合には、変更された縫製条件に応じて、模様データが修正された後、縫製が実行される。メイン処理は以上で終了する。
以上のように、第1実施形態のミシン1では、ユーザは、ユーザは縫製対象物100に縫製される刺繍模様200の仕上がり等を予想しながら、超音波ペン91のペン先911の位置を縫製対象物100上に指定することによって、ミシン1に刺繍模様の縫製条件を指定できる。指定された縫製条件は、縫製対象物100上に投影される標識400を目視することによって確認することができる。ミシン1では、超音波ペン91を用いて、縫製対象物100上で任意の位置を指定することができる。指定位置と、標識が投影される位置とは、共に縫製対象物上にある。したがって、両者が離れている場合に比べ、ユーザは指定位置の指定状況を確認しやすい。
ミシン1は、縫製条件として刺繍模様の縫製位置、縫製角度及び模様の大きさを設定可能である。縫製条件として縫製位置が選択された場合、ミシン1は、特定した1つの指定位置に基づき刺繍模様の縫製位置を設定することができる。このため、例えば、縫製対象物100の模様の右隣に刺繍模様200を配置したいという要望を、基準に対応する点を位置指定位置として指定するという簡単な操作で実現することができる。縫製条件として縫製角度が選択された場合、ミシン1は、特定した2つの指定位置に基づき刺繍模様の縫製角度を設定することができる。ミシン1は、刺繍模様200の矩形の刺繍領域201のうち、いずれかの辺の延伸方向を、指定位置を用いて指定することができる。このため、例えば、ストライプ柄の縫製対象物の柄に沿って刺繍模様200を配置したいという要望を、基準に対応する2点を角度指定位置と指定するという簡単な操作で、実現することができる。縫製条件として模様の大きさが選択された場合、ミシン1は、特定した2つの指定位置に基づき刺繍模様の大きさを設定することができる。このため、例えば、縫製対象物に含まれる矩形模様全域に刺繍模様200を配置したいという要望を、基準に対応する2点を大きさ指定位置と指定するという簡単な操作によって実現することができる。
ミシン1が投影する標識400は、複数の縫製条件のそれぞれを表す。ユーザは、縫製対象物100上に投影された標識400によって、複数の縫製条件のそれぞれの指定状況を容易に把握することができる。変更後の縫製条件は、投影中の標識にすぐにフィードバックされる。ユーザは、縫製対象物の上面に投影される標識を確認しながら、超音波ペン91を用いて指定位置を指定することによって、縫製条件の微調整を、容易に行うことができる。特に、ミシン1は複数種類の縫製条件の中から選択した1つの縫製条件の設定を変更することができるので、縫製条件の微調整が容易である。ミシン1は、設定画面153を用いて、縫製条件を変更する際の基準の選択を受け付ける。したがって、ミシン1は、基準を選択できない場合に比べ、縫製条件を変更する際の利便性を向上させることができる。したがって、ユーザは所望とする縫製条件を容易に設定することができる。
図9から13を参照して、第2実施形態のメイン処理を説明する。第2実施形態のメイン処理は、基本的に図11に示す第1実施形態のメイン処理と同様である。第2実施形態では、縫製条件の指定方法が第1実施形態と異なる。第2実施形態のメイン処理は、縫製対象物100が刺繍装置2に取り付けられた刺繍枠53に保持されている状態で開始される。図11のメイン処理を実行させるプログラムは、図7のROM62に記憶されており、CPU61が実行する。具体例として、ユーザによって選択された刺繍模様200の縫製条件を、図10の刺繍領域201で示す初期の縫製条件から、図10の刺繍領域301で示す条件に変更する場合について説明する。
まず、第2実施形態の縫製条件の指定方法を説明する。第2実施形態では、所定時間(例えば、30秒)内に指定される指定位置の個数に応じて、設定変更する縫製条件の種類と変更内容とが決定される。指定位置が1つの場合、設定変更する縫製条件の種類として、縫製位置が特定される。この場合、指定された指定位置が位置指定位置として特定される。位置指定位置を用いて縫製位置を設定する方法は第1実施形態と同様である。指定位置が2つの場合、設定変更する縫製条件の種類として、縫製位置及び縫製角度が特定される。この場合2つの指定位置は、入力順に第1指定位置及び第2指定位置であると特定される。さらに、第1指定位置は位置指定位置として特定される。第1指定位置及び第2指定位置は、角度指定位置として特定される。角度指定位置を用いて縫製角度を設定する方法は第1実施形態と同様である。指定位置が3つの場合、設定変更する縫製条件の種類として、縫製位置、縫製角度及び模様の大きさが特定される。この場合3つの指定位置は、入力順に第1指定位置、第2指定位置及び第3指定位置であると特定される。さらに、第1指定位置は位置指定位置として特定される。第1指定位置及び第2指定位置は、角度指定位置として特定される。第1指定位置及び第3指定位置は、大きさ指定位置として特定される。大きさ指定位置を用いて模様の大きさを設定する方法は第1実施形態と同様である。各縫製条件の基準は、第1実施形態と同様に設定画面153を用いて設定可能である。第2実施形態のミシン1は、初期の設定条件を自動的に設定し、ユーザから指定された場合にはユーザからの指示を優先する。初期の設定条件は、縫製位置の基準は点361である。縫製角度の基準はブロック371である。模様の大きさの基準は、点361及び点363である。
次に、図11に示す第2実施形態のメイン処理について簡単に説明する。メイン処理では、刺繍模様が特定された後(S1)、図9の設定画面153が表示される(S3)。第1実施形態と同様の具体例において、初期の設定条件に従って、指定位置302から304が順に指定された場合を想定する。この場合、指定位置302から304は、それぞれ第1指定位置302,第2指定位置303,第3指定位置304と特定される。標識400の投影が開始された後(S5)、第1指定位置302を表す情報が取得され(S7:YES,S8)、取得された情報に基づき位置指定位置の座標が特定される(S9)。特定された第1指定位置302と、縫製位置の基準である点361とに基づき、刺繍領域201の点202の位置が位置指定位置の座標に配置されるように、縫製位置が設定される(S11)。投影中の標識に縫製位置の変更が反映された後(S25)、縫製条件を変更中であると判断される(S27:NO)。次に、縫製位置は設定済みであると判断され(S7:NO)、第1指定位置302を表す情報及び第2指定位置303を表す情報が取得される(S13:YES,S14)。取得された情報に基づき、角度指定位置の座標が特定され(S15)、第1指定位置302から第2指定位置303に向かうベクトルと、縫製角度の基準であるブロック371とに基づき、縫製角度が設定される(S17)。投影中の標識に変更が反映された後(S25)、縫製条件変更中であると判断される(S27:NO)。
次に、縫製位置及び縫製角度は設定済みであると判断され(S7:NO,S13:NO)、第1指定位置302を表す情報及び第3指定位置304を表す情報が取得される(S19:YES,S20)。取得された情報に基づき、大きさ指定位置の座標が特定される(S21)。第1指定位置302と第3指定位置304とを結ぶ線分の長さが、模様の大きさの基準である点361と点363とを結ぶ線分の長さとなるように、模様の大きさが設定される(S23)。投影中の標識に変更が反映される(S25)。指定位置が所定時間内に1つも入力されない場合(S7:NO,S13:NO,S19:NO)、又はS25の次に、OKボタン381が選択されれば(S27:YES)、標識の投影が終了され(S29)、模様の縫製が実行される(S31)。OKボタン381が選択されなければ(S27:NO)、処理はS7に戻る。
以上のように、第2実施形態のミシン1によれば、超音波ペン91のペン先911の位置を縫製対象物100上に指定することによって、第1実施形態のミシン1と同様の効果を奏する。第2実施形態のミシン1は、指定位置の数によって、設定変更の対象となる縫製条件を選択するので、ユーザがパネル操作によって縫製条件を選択する手間を省くことができる。また1つから3つの指定位置を指定するという一連の操作で、複数種類の縫製条件を一度に設定することができる。
上記第1及び第2実施形態のミシン1において、図11のS8,S14,S20の処理を実行する入出力インターフェイス65,受信器94,95,及びCPU61は、本発明の位置取得手段に相当する。S9,S15,S21の処理を実行するCPU61は、本発明の位置特定手段として機能する。図11のS25の処理を実行するCPU61とプロジェクタ40は、本発明の投影手段に相当する。図7の縫製機構89は、本発明の縫製手段に相当する。図11のS1を実行するCPU61は、本発明の模様特定手段として機能する。S11,S17,S23を実行するCPU61は、本発明の設定手段として機能する。S31を実行するCPU61は、本発明の縫製制御手段として機能する。
本発明のミシンは、上記した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更が加えられてもよい。例えば、以下の(A)から(E)までの変形が適宜加えられてもよい。
(A)ミシン1の構成は適宜変更されてよい。ミシンは、例えば、工業用ミシン、及び多針ミシン等の他のミシンであってもよい。また例えば、ミシンは、刺繍装置を備えないミシンでもよい。また例えば、ミシンは、刺繍装置と一体に構成されたミシンでもよい。縫製対象物は、縫目を形成可能なものであればよい。ミシンは、縫製対象物上の任意の位置である指定位置を指定する機器(位置取得機器)を備えてもよいし、ミシン1のように、ミシンと位置取得機器とは別体であってもよい。
(B)指定位置を表す情報及び情報の取得方法は適宜変更されてよい。また指定位置の特定方法は、取得される情報に応じて適宜変更されてよい。例えば、イメージセンサ等の撮影装置から取得した画像データが、入出力インターフェイス65を介して、指定位置を表す情報として取得されてもよい。画像データから指定位置を特定する方法は、公知の方法(例えば、特開2011−194043号公報参照)が適宜採用されればよい。また例えば、ペンタブレットから出力されるデータが、入出力インターフェイス65を介して、指定位置を表す情報として取得されてもよい。また、超音波ペンを用いて指定位置を指定する場合、指定位置を表す情報として、例えば、取付位置が特定された3つ以上の受信器から検出される時間が取得されてもよい。この場合ミシンは、上述の式(5)及び(6)と同様な、受信器の数に応じた数の式を含む連立方程式及び各受信器の指向性に基づき、指定位置を特定することができる。また例えば、指定位置を表す情報は、無線で取得されてもよい。
(C)標識のデザイン、形状、及び大きさ等は、標識が表す条件を考慮して適宜変更されてもよい。例えば、標識が縫製位置を表す場合、標識は、十字模様、丸、及び星型であってもよい。標識が表す内容は、刺繍模様の縫製条件以外の内容でもよい。この場合例えば、標識はプロジェクタを校正するための標識を投影してもよい。より具体的には、超音波ペン91で指定した指定した位置に標識が投影されるように、調節ネジ44を調整したり、画像データを生成する際に用いられるパラメータを補正したりする処理が実行されてもよい。指定位置に基づき、複数種類の縫製条件が設定される場合、標識は複数種類の縫製条件のそれぞれを表さなくてもよい。例えば、刺繍模様の縫製条件として、縫製位置、縫製角度及び模様の大きさが設定される場合、標識は模様の大きさのみを表してもよい。
(D)標識を投影させる投影装置は、前述のプロジェクタに限定されず適宜変更されてもよい。例えば、投影装置は、レーザラインマーカ及びレーザポインタの少なくともいずれかであってもよい。また例えば、投影装置は、ミシンに着脱可能に取り付けられるものであってもよい。また例えば、投影装置はミシンの本体とは別体の装置であってもよい。また例えば、投影装置は、取付位置を変更可能に構成されてもよい。投影装置の投影範囲は、適宜変更されてよい。例えば、指定位置の座標に基づき、模様の大きさが設定される場合には、標識は模様の縫製位置を示す必要がないので、投影装置の投影範囲は刺繍枠53の縫製領域54を含む必要がない。また例えば、プロジェクタは縫製条件が変更されるごとに、変更内容を投影中の標識に反映させていたが、これに限定されない。例えばミシンは、ユーザから変更内容を反映する指示があった時にのみ、変更内容を投影中の標識に反映させてもよい。また例えば、第2実施形態のミシン1は、2つ以上の指定位置を指定するという一連の操作で指定された指定位置に基づき、複数の縫製条件が設定された場合に、変更内容を投影中の標識に反映させてもよい。標識が投影される場所は、標識が表す内容を考慮して、指定位置に基づき設定されればよい。例えば、上記第1及び第2実施形態において、指定位置に基づき、縫製位置が設定される場合、縫製位置の基準に応じて、刺繍領域の中心の縫製位置を表す十字矢印模様が投影される位置と、指定位置とが同じになる場合と、異なる場合とがある。
(E)指定位置に基づき、刺繍模様の縫製条件を設定する方法は適宜変更されてよい。例えば、指定位置を用いて縫製位置を指定する場合に、2つの指定位置の中心点の座標に、刺繍模様の基準点が配置されてもよい。また例えば、2つの指定位置に基づき、縫製位置、縫製角度、及び模様の大きさが設定されてもよい。この場合、例えば、次のように各条件が設定されてよい。2つの指定位置のいずれかの座標に基づき縫製位置が設定される。一方の指定位置から他方の指定位置に向かうベクトルの向きに基づき、縫製角度が設定される。2つの指定位置を結ぶ線分の長さに基づき、刺繍模様の大きさが設定される。また複数種類の縫製条件を設定可能なミシンにおいて、第1実施形態のミシン1のように、1つの指定位置が、単一の縫製条件を設定する処理に使用されてもよいし、第2実施形態のミシン1のように、1つの指定位置が複数種類の縫製条件のそれぞれを設定する処理に使用されてもよい。
また例えば、第1実施形態のメイン処理と、第2実施形態のメイン処理とを組み合わせ、複数の指定位置に基づき複数の縫製条件を一度に変更可能な態様と、特定の縫製条件のみを変更可能な態様との双方を選択可能にしてもよい。このようにすれば、ユーザは、複数の指定位置に基づき複数の縫製条件を一度に変更することによって大まかに縫製条件を指定した後、特定の縫製条件のみを変更することによって縫製条件を微調整することができる。また例えば、複数の指定位置に基づき縫製条件が設定される場合、縫製位置に加え、縫製角度及び模様の大きさの少なくともいずれかが設定されてもよい。例えば、2つの指定位置に基づき、縫製位置と、模様の大きさとが設定されてもよい。さらに、ミシン1は、縫製条件の再設定を受け付けなくてもよい。この場合ミシン1は、図11のS27において指定位置に基づき縫製条件を設定する処理が終了した場合に(S27:YES)、S29の処理を実行すればよい。複数の指定位置に基づき複数の縫製条件が設定される場合、複数の指定位置のそれぞれがどの縫製条件を設定する処理に用いられるかは、適宜設定されればよい。刺繍模様の縫製条件は、縫製位置、縫製角度、及び模様の大きさ以外の条件でもよい。例えば、指定位置に基づき、刺繍模様の縫製条件として、刺繍模様の変形量が設定されてもよい。
1 ミシン
2 刺繍装置
60 制御部
61 CPU
62 ROM
63 RAM
64 EEPROM
65 入出力インターフェイス
89 縫製機構
94,95 受信器
100 縫製対象物
2 刺繍装置
60 制御部
61 CPU
62 ROM
63 RAM
64 EEPROM
65 入出力インターフェイス
89 縫製機構
94,95 受信器
100 縫製対象物
Claims (6)
- 縫製対象物上の任意の位置である指定位置を表す情報を取得する位置取得手段と、
前記位置取得手段が取得した前記情報が表す前記縫製対象物上の前記指定位置を特定する位置特定手段と、
前記位置特定手段によって特定された前記指定位置に基づき、視認可能な標識を前記縫製対象物上に投影する投影手段と
を備えたことを特徴とするミシン。 - 前記縫製対象物に縫目を形成する縫製手段と、
前記縫製対象物に縫製を行う刺繍模様を特定する模様特定手段と、
前記模様特定手段によって特定された前記刺繍模様を縫製するための条件である縫製条件を、前記位置特定手段が特定した前記指定位置に基づき設定する設定手段と、
前記縫製手段を制御して、前記設定手段によって設定された前記縫製条件に基づき、前記模様特定手段が特定した前記刺繍模様を、前記縫製対象物に縫製する縫製制御手段と
をさらに備え、
前記投影手段は、前記位置特定手段によって特定された前記指定位置に基づき、前記設定手段によって設定された前記縫製条件を表す前記標識を前記縫製対象物上に投影することを特徴とする請求項1に記載のミシン。 - 前記設定手段は、前記縫製条件として前記刺繍模様の縫製位置を、前記位置特定手段が特定した前記指定位置に基づき設定することを特徴とする請求項2に記載のミシン。
- 前記位置特定手段が、前記指定位置を複数特定した場合、前記設定手段は、前記縫製条件として、前記模様特定手段によって特定された前記刺繍模様の前記縫製位置に加え、前記刺繍模様の角度及び大きさの少なくともいずれかを設定することを特徴とする請求項3に記載のミシン。
- 前記投影手段は、前記設定手段が複数種類の前記縫製条件を設定した場合に、前記複数種類の前記縫製条件のそれぞれを表す前記標識を前記縫製対象物上に投影することを特徴とする請求項2から4のいずれかに記載のミシン。
- 前記設定手段は、前記位置特定手段によって特定される前記指定位置が変更された場合に、前記刺繍模様の前記縫製条件を再設定し、
前記投影手段は、前記位置特定手段によって特定される前記指定位置が変更された場合に、前記位置特定手段によって特定された変更後の前記指定位置に基づき、前記設定手段が再設定した前記縫製条件を表す前記標識を前記縫製対象物上に投影することを特徴とする請求項2から5のいずれかに記載のミシン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012144266A JP2014008073A (ja) | 2012-06-27 | 2012-06-27 | ミシン |
| US13/912,712 US9127383B2 (en) | 2012-06-27 | 2013-06-07 | Sewing machine and non-transitory computer-readable medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012144266A JP2014008073A (ja) | 2012-06-27 | 2012-06-27 | ミシン |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014008073A true JP2014008073A (ja) | 2014-01-20 |
Family
ID=49776811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012144266A Pending JP2014008073A (ja) | 2012-06-27 | 2012-06-27 | ミシン |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9127383B2 (ja) |
| JP (1) | JP2014008073A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019116603A1 (ja) * | 2017-12-15 | 2019-06-20 | ブラザー工業株式会社 | ミシン |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013188264A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188263A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188262A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188266A (ja) * | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP5605384B2 (ja) | 2012-03-12 | 2014-10-15 | ブラザー工業株式会社 | 刺繍装置 |
| JP2014008073A (ja) | 2012-06-27 | 2014-01-20 | Brother Ind Ltd | ミシン |
| JP2014064660A (ja) * | 2012-09-25 | 2014-04-17 | Brother Ind Ltd | ミシン |
| JP2014124464A (ja) * | 2012-12-27 | 2014-07-07 | Brother Ind Ltd | ミシン |
| JP2015104442A (ja) * | 2013-11-29 | 2015-06-08 | ブラザー工業株式会社 | ミシン |
| JP6494953B2 (ja) * | 2014-08-21 | 2019-04-03 | 蛇の目ミシン工業株式会社 | 刺繍ミシンの刺繍縫い変換装置、刺繍ミシンの刺繍縫い変換方法、刺繍ミシンの刺繍縫い変換プログラム |
| JP6607033B2 (ja) * | 2015-12-25 | 2019-11-20 | ブラザー工業株式会社 | 縫製データ生成プログラム及び縫製データ生成装置 |
| JP6732517B2 (ja) * | 2016-04-26 | 2020-07-29 | 蛇の目ミシン工業株式会社 | 縫製データ生成装置、縫製データ生成方法、プログラムおよび縫製システム |
| JP6860294B2 (ja) * | 2016-04-26 | 2021-04-14 | 蛇の目ミシン工業株式会社 | 刺繍模様連結データ生成装置、刺繍模様連結データ生成方法、プログラムおよび縫製システム |
| JP6986333B2 (ja) * | 2016-04-28 | 2021-12-22 | 株式会社ジャノメ | 刺繍模様連結データ生成装置、刺繍模様連結データ生成方法、プログラムおよび縫製システム |
| JP6770782B2 (ja) * | 2016-04-28 | 2020-10-21 | 蛇の目ミシン工業株式会社 | 縫製データ生成装置、縫製データ生成方法、プログラムおよび縫製システム |
| US10563330B2 (en) * | 2016-06-08 | 2020-02-18 | One Sciences, Inc. | Methods and systems for stitching along a predetermined path |
| JP2019058411A (ja) * | 2017-09-27 | 2019-04-18 | ブラザー工業株式会社 | ミシン |
| JP2019107063A (ja) * | 2017-12-15 | 2019-07-04 | ブラザー工業株式会社 | ミシン |
| JP6864032B2 (ja) * | 2018-06-11 | 2021-04-21 | パオ チェン コン イエ クー フェン ユー シェン コン スー | 製靴用ミシン |
| JP2020025604A (ja) * | 2018-08-09 | 2020-02-20 | ブラザー工業株式会社 | ミシン |
| JP2021010620A (ja) * | 2019-07-08 | 2021-02-04 | ブラザー工業株式会社 | 縫製システム及びミシン |
| US10738398B1 (en) * | 2019-11-12 | 2020-08-11 | Softwear Automation, Inc. | Methods and systems for making a sewn product using a robot |
| US11727615B1 (en) | 2022-06-15 | 2023-08-15 | CreateMe Technologies LLC | Needle point path editing |
| US11725319B1 (en) | 2022-06-15 | 2023-08-15 | CreateMe Technologies LLC | Converting drawn paths into an embroidery machine file |
| US11473229B1 (en) * | 2022-06-20 | 2022-10-18 | CreateMe Technologies LLC | Composite procedure editor |
| CN118350276B (zh) * | 2024-04-24 | 2024-11-01 | 广东工业大学 | 一种潮州垫高绣数字化工艺制作过程的交互系统设计方法及系统 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5047528A (ja) | 1973-08-27 | 1975-04-28 | ||
| JPH0653199B2 (ja) * | 1985-04-25 | 1994-07-20 | ブラザー工業株式会社 | ミシンの定寸縫い装置 |
| JP2649540B2 (ja) * | 1988-04-28 | 1997-09-03 | 蛇の目ミシン工業株式会社 | 刺しゅうミシン |
| JP2734717B2 (ja) | 1990-02-10 | 1998-04-02 | ブラザー工業株式会社 | 模様等の各種形象を映写し得るミシン |
| JP2871197B2 (ja) | 1991-07-12 | 1999-03-17 | ブラザー工業株式会社 | 縫製模様等を確認可能なミシン |
| JPH06319879A (ja) * | 1993-05-14 | 1994-11-22 | Brother Ind Ltd | 刺繍ミシン並びに刺繍ミシンに用いられる記憶媒体 |
| JP3766702B2 (ja) * | 1995-04-26 | 2006-04-19 | 蛇の目ミシン工業株式会社 | 刺しゅう位置設定装置を備えた刺しゅうミシン |
| JPH10137467A (ja) * | 1996-11-11 | 1998-05-26 | Juki Corp | 模様縫製装置、模様縫製方法及び模様表示方法 |
| US5855176A (en) * | 1997-05-07 | 1999-01-05 | Janome Sewing Machine Co., Ltd. | Embroidery stitch data producing device and sewing machine |
| ATE315120T1 (de) * | 2001-12-19 | 2006-02-15 | Gegauf Fritz Ag | Verfahren und vorrichtung zum regeln des stofftransportes bei einer näh- oder stickmaschine |
| AU2004210951B2 (en) | 2003-02-12 | 2009-07-09 | Ralph J. Koerner | Quilting method and apparatus |
| US6932008B2 (en) * | 2003-03-17 | 2005-08-23 | Thomas A. Pfeifer | Quilting table for a sewing machine |
| JP2005279008A (ja) * | 2004-03-30 | 2005-10-13 | Brother Ind Ltd | 刺繍データ作成装置、刺繍データ作成方法、刺繍データ作成制御プログラム及び刺繍方法 |
| JP4389211B2 (ja) * | 2004-03-31 | 2009-12-24 | ブラザー工業株式会社 | 刺繍データ作成装置、刺繍データ作成制御プログラム |
| WO2005113876A2 (en) * | 2004-05-14 | 2005-12-01 | Koerner Ralph J | Quilting method and apparatus using frame with motion detector |
| US7854207B2 (en) * | 2004-11-08 | 2010-12-21 | Brother Kogyo Kabushiki Kaisha | Data processing unit and pattern forming method |
| US8074590B2 (en) | 2007-12-12 | 2011-12-13 | Arthur Bentley | Method and system for freehand and realtime quilting with a computer-controlled quilting machine |
| JP5141264B2 (ja) | 2008-01-24 | 2013-02-13 | ブラザー工業株式会社 | ミシン |
| JP5298186B2 (ja) * | 2009-03-12 | 2013-09-25 | 株式会社フジクラ | 光ファイバ母材の製造方法 |
| JP2010284364A (ja) | 2009-06-12 | 2010-12-24 | Brother Ind Ltd | 縫製装置及びプログラム |
| JP4811509B2 (ja) * | 2009-09-03 | 2011-11-09 | ブラザー工業株式会社 | ミシン |
| JP4862928B2 (ja) * | 2009-09-03 | 2012-01-25 | ブラザー工業株式会社 | ミシン |
| JP2011161087A (ja) * | 2010-02-12 | 2011-08-25 | Brother Industries Ltd | ミシン |
| JP2011194043A (ja) | 2010-03-19 | 2011-10-06 | Brother Industries Ltd | ミシン |
| JP2012100788A (ja) * | 2010-11-09 | 2012-05-31 | Brother Ind Ltd | 刺繍データ作成装置、刺繍データ作成プログラム、および刺繍データ作成プログラムを記憶したコンピュータ読取り可能な媒体 |
| JP2012170470A (ja) * | 2011-02-17 | 2012-09-10 | Brother Ind Ltd | ミシン |
| JP2013188265A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188264A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188263A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP2013188262A (ja) | 2012-03-12 | 2013-09-26 | Brother Ind Ltd | ミシン |
| JP5605384B2 (ja) * | 2012-03-12 | 2014-10-15 | ブラザー工業株式会社 | 刺繍装置 |
| JP2014008073A (ja) | 2012-06-27 | 2014-01-20 | Brother Ind Ltd | ミシン |
| JP2014042706A (ja) | 2012-08-28 | 2014-03-13 | Brother Ind Ltd | ミシン |
-
2012
- 2012-06-27 JP JP2012144266A patent/JP2014008073A/ja active Pending
-
2013
- 2013-06-07 US US13/912,712 patent/US9127383B2/en active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019116603A1 (ja) * | 2017-12-15 | 2019-06-20 | ブラザー工業株式会社 | ミシン |
| US11274385B2 (en) | 2017-12-15 | 2022-03-15 | Brother Kogyo Kabushiki Kaisha | Sewing machine |
| US11680347B2 (en) | 2017-12-15 | 2023-06-20 | Brother Kogyo Kabushiki Kaisha | Sewing machine |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140000498A1 (en) | 2014-01-02 |
| US9127383B2 (en) | 2015-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014008073A (ja) | ミシン | |
| US8763542B2 (en) | Sewing machine and non-transitory computer-readable medium | |
| US7392755B2 (en) | Sewing machine capable of embroidery sewing | |
| JP2013188265A (ja) | ミシン | |
| JP5605384B2 (ja) | 刺繍装置 | |
| US20140230706A1 (en) | Non-transitory computer-readable medium, sewing machine system, and embroidery frame | |
| JP2013188264A (ja) | ミシン | |
| US9145632B2 (en) | Sewing machine and non-transitory computer-readable medium | |
| JP6604171B2 (ja) | 刺繍模様編集プログラム及び刺繍模様編集装置 | |
| JP2011194042A (ja) | ミシン | |
| JP2020005694A (ja) | ミシン | |
| US11180879B2 (en) | Sewing machine and pattern alignment method | |
| JP2014155579A (ja) | ミシン、ミシンプログラム、及びミシンシステム | |
| JP2011234959A (ja) | ミシン | |
| US20260035845A1 (en) | Sewing machine | |
| JP2015093127A (ja) | ミシン | |
| JP2013188266A (ja) | ミシン | |
| US10947654B2 (en) | Sewing machine | |
| JP2015048537A (ja) | ミシン | |
| JP2014087506A (ja) | ミシン | |
| WO2016129491A1 (ja) | 切断装置及びアップリケ縫製方法 | |
| WO2023145716A1 (ja) | ミシン | |
| JP2011005180A (ja) | ミシン | |
| US12460333B2 (en) | Control device for sewing machine, and sewing machine | |
| JP5811219B2 (ja) | ミシン |