JP2014016883A - 危険個所報知システムおよび危険個所報知方法 - Google Patents
危険個所報知システムおよび危険個所報知方法 Download PDFInfo
- Publication number
- JP2014016883A JP2014016883A JP2012154757A JP2012154757A JP2014016883A JP 2014016883 A JP2014016883 A JP 2014016883A JP 2012154757 A JP2012154757 A JP 2012154757A JP 2012154757 A JP2012154757 A JP 2012154757A JP 2014016883 A JP2014016883 A JP 2014016883A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- dangerous
- location
- notification
- risk information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Traffic Control Systems (AREA)
Abstract
【解決手段】車両の乗員に対して危険個所の報知を行う危険個所報知システムであって、道路付近に設けられ、車両の動作を検出する車両動作検出手段と、前記検出手段によって検出された車両の動作が危険行為であるか否かを判定する危険行為判定手段と、前記車両動作検出手段の設置個所付近の道路を走行する車両の数に占める危険行為を行った車両の割合である危険行為割合を記憶する記憶手段と、前記車両動作検出手段の設置個所に関する危険度情報であって、前記記憶手段に格納された危険行為割合に基づいて決定される危険度情報を、車両に対して送信する送信手段と、前記送信手段から送信される前記危険度情報に基づいて、車両の乗員に対して危険個所の報知を行う報知手段と、を備える。
【選択図】図2
Description
段の設置個所付近の道路を走行する車両の数に占める危険行為を行った車両の割合である危険行為割合を記憶する記憶手段と、前記車両動作検出手段の設置個所に関する危険度情報であって、前記記憶手段に格納された危険行為割合に基づいて決定される危険度情報を、車両に対して送信する送信手段と、前記送信手段から送信される前記危険度情報に基づいて、車両の乗員に対して危険個所の報知を行う報知手段と、を備える。
て適切な装置を採用することができる。車両動作検出手段として、例えば、車両を撮影する撮像手段とすることができる。この場合、危険行為判定手段は、撮像手段によって撮影された画像を画像処理することによって検出された車両の動作が危険行為であるか否かを判定することができる。
本発明の第1の実施形態は、無視されやすい一時停止標識について警告を行う一時停止標識報知システム(危険個所報知システム)である。図1は、本実施形態にかかるシステムの概要を説明する図である。本実施形態にかかる一時停止標識報知システムは、一時停止標識A付近に設けられた路側機100と、サーバ装置200と、車両300とから構成される。図1では、路側機100、サーバ装置200、車両300のいずれも1つのみ描かれているが、本システムはこれらの要素を複数備えていても構わない。
図2は、本実施形態にかかる一時停止標識報知システムの機能ブロックを示す図である。路側機100は、カメラ110、一時停止無視車両検知部120、および測定結果通知部130を有する。
一時停止個所であるので、カメラ110は一時停止標識付近に設けられて、一時停止個所を通過する車両Bを撮影する。カメラ110の解像度やフレームレートなどは、車両Bの動作を判定できる範囲で任意であって構わない。カメラ110が、本発明における車両動作検出手段に相当する。
両から特定の一時停止標識についての危険度情報の要求に応答して送信する方法と、サーバ装置200から1つまたは複数の一時停止標識に関する危険度情報を配信する方法とがある。本実施形態では、車両300からの要求に応答して危険度情報を送信する。
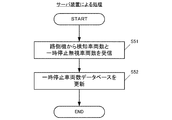
本実施形態における各装置が行う処理の流れを、フローチャートを参照しながら説明する。
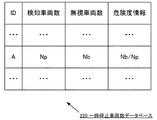
する度に測定結果を通知する処理としているので、例えば、検知した車両が一時停止した場合には[A,1,0]というデータが通知され、検知した車両が一時停止しなかった場合には[A,1,1]というデータが通知される。ただし、上述したように、測定結果をサーバ装置200へ通知するタイミングは任意であって構わない。
本実施形態に係る一時停止標識報知システムでは、一時停止個所における車両の動作を解析して、一時停止が無視されやすい個所を把握可能である。一時停止を無視した車両が多い個所というのは、一見見晴らしがよいような印象を与える情況であるとか、道路環境が複雑で標識を見落としやすいというような要因が考えられる。これらの要因を実際に検討して標識の危険度の判定を定量的に算出することは難しいが、本実施形態では、実測に基づいて標識が無視された割合を取得しているので精度の良い危険個所の判定が行える。
適切な頻度で警告報知を行える。
上記の説明は例示であり、種々の変形が可能である。以下、第1の実施形態にかかる一時停止標識報知システムの変形例について説明する。
図1等で説明した路側機、サーバ装置、車両の間、あるいはこれらに加えて通信により接続された任意の装置との間で、処理をどのように分担するかは適宜設計すればよい。
本発明の第2の実施形態も、無視されやすい一時停止標識について警告を行う一時停止標識報知システムである。ただし、本実施形態においてはサーバ装置を用いない点で第1の実施形態と相違する。図9は、本実施形態にかかる一時停止標識報知システムのシステム概要を示す図である。本実施形態においては、路側機500が検知した検知車両数と一時停止無視車両数は、路側機500内で集計され、危険度情報が算出される。そして、路側機500から、一時停止標識位置に向かう車両600に対して危険度情報を送信する。車両600は、路側機500から送信される危険度情報に基づいて、注意喚起を促す警告報知を行う。
情報を受信したら警告報知を行うようにしても良い。また、上記第1の実施形態の変形例として記載した事項は、本実施形態と矛盾しない範囲内において、本実施形態にも適用することができる。
上記第1および第2の実施形態は、いずれも一時停止標識についての警告を行う一時停止標識報知システムであるが、本発明は一時停止標識に関する警告を行うシステムには限定されない。本発明は、任意の危険個所に関する警告を行う危険個所報知システムとして捉えることができる。すなわち、車両の乗員に対して危険個所の報知を行う危険個所報知システムとして捉えることができる。
110 カメラ
120 一時停止無視車両検知部
130 測定結果通知部
200 サーバ装置
210 データベース更新部
220 一時停止車両数データベース
230 危険度情報送信部
300 車両
310 車載端末
320 経路探索部
330 一時停止標識特定部
340 危険度情報要求部
350 報知部
Claims (11)
- 車両の乗員に対して危険個所の報知を行う危険個所報知システムであって、
道路付近に設けられ、車両の動作を検出する車両動作検出手段と、
前記車両動作検出手段によって検出された車両の動作が危険行為であるか否かを判定する危険行為判定手段と、
前記車両動作検出手段の設置個所付近の道路を走行する車両の数に占める危険行為を行った車両の割合である危険行為割合を記憶する記憶手段と、
前記車両動作検出手段の設置個所に関する危険度情報であって、前記記憶手段に格納された危険行為割合に基づいて決定される危険度情報を、車両に対して送信する送信手段と、
前記送信手段から送信される前記危険度情報に基づいて、車両の乗員に対して危険個所の報知を行う報知手段と、
を備える危険個所報知システム。 - 前記危険度情報は、前記危険行為割合を含み、
前記報知手段は、前記車両動作検出手段の設置個所における危険行為割合が所定のしきい値以上である場合に、車両の乗員に対して危険個所の報知を行う、
請求項1に記載の危険個所報知システム。 - 前記危険行為割合に基づいて、前記車両動作検出手段の設置個所が危険個所であるか否かを判定する危険個所判定手段をさらに有し、
前記危険度情報は、前記車両動作検出手段の設置個所が危険個所であるか否かを表す情報を含み、
前記報知手段は、前記車両動作検出手段の設置個所が危険個所である旨を表す危険度情報を受信したら、車両の乗員に対して危険個所の報知を行う、
請求項1に記載の危険個所報知システム。 - 前記危険行為は、交通規則違反、急加減速、急旋回の少なくともいずれかである、
請求項1〜3のいずれかに記載の危険個所報知システム。 - 前記車両動作検出手段は、車両を撮影する撮像手段であり、
前記危険行為判定手段は、前記撮像手段によって撮影された画像を画像処理することにより、検出された車両の動作が危険行為であるか否かを判定する、
請求項1〜4のいずれかに記載の危険個所報知システム。 - 前記車両動作検出手段は、交通標識付近に設置され、
前記危険行為は、当該交通標識によって指示される交通規則に違反する行為である、
請求項5に記載の危険個所報知システム。 - 前記車両動作検出手段と前記危険行為判定手段とを有する路側機と、
前記記憶手段と前記送信手段とを有するサーバ装置と、
前記報知手段を有する車両と、
から構成される請求項1〜6のいずれかに記載の危険個所報知システムであって、
前記路側機は、前記車両動作検出手段が検出した車両の台数および前記危険行為判定手段が危険行為であると判定した車両の台数を前記サーバ装置へ通知する通知手段をさらに有し、
前記サーバ装置は、前記路側機の通知手段から通知される情報に基づいて、前記記憶手段を更新する更新手段を有する、
危険個所報知システム。 - 前記車両は、前記サーバ装置に対して、路側機の設置個所についての危険度情報を要求する要求手段をさらに有し、
前記サーバ装置の送信手段は、前記車両からの要求に応じて、要求された路側機の設置個所についての危険度情報を送信し、
前記車両の報知手段は、受信した危険度情報に基づいて、当該路側機の設置個所が危険個所である旨を乗員に報知する、
請求項7に記載の危険個所報知システム。 - 前記サーバ装置の送信手段は、複数の路側機の設置個所についての危険度情報を前記車両に対して送信し、
前記車両の報知手段は、当該車両の位置付近に、危険個所である路側機の設置個所が存在するか前記危険度情報に基づいて判定し、危険個所が存在する場合には当該路側機の設置個所が危険個所である旨を乗員に報知する、
請求項7に記載の危険個所報知システム。 - 前記車両動作検出手段と前記危険行為判定手段と前記記憶手段と前記送信手段とを有する路側機と、
前記報知手段を有する車両と、
から構成される請求項1〜6のいずれかに記載の危険個所報知システムであって、
前記路側機の前記送信手段は、路車間通信によって当該路側機の設置個所の危険度情報を前記車両に対して送信する、
危険個所報知システム。 - 車両の乗員に対して危険個所の報知を行う危険個所報知システムにおける危険個所報知方法であって、
道路上の所定個所を監視し、車両の動作を検出する車両動作検出ステップと、
前記車両動作検出ステップにおいて検出された車両の動作が危険行為であるか否かを判定する危険行為判定ステップと、
前記所定個所を走行する車両の数に占める危険行為を行った車両の割合である危険行為割合を記憶する記憶ステップと、
前記所定個所に関する危険度情報であって、前記記憶ステップにおいて記憶された危険行為割合に基づいて決定される危険度情報を、車両に対して送信する送信ステップと、
前記送信ステップにおいて送信される前記危険度情報に基づいて、車両の乗員に対して危険個所の報知を行う報知ステップと、
を含む危険個所報知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012154757A JP2014016883A (ja) | 2012-07-10 | 2012-07-10 | 危険個所報知システムおよび危険個所報知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012154757A JP2014016883A (ja) | 2012-07-10 | 2012-07-10 | 危険個所報知システムおよび危険個所報知方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014016883A true JP2014016883A (ja) | 2014-01-30 |
Family
ID=50111484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012154757A Pending JP2014016883A (ja) | 2012-07-10 | 2012-07-10 | 危険個所報知システムおよび危険個所報知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014016883A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015133141A1 (ja) * | 2014-03-06 | 2015-09-11 | 株式会社デンソー | 表示物情報表示装置 |
| WO2015155990A1 (en) | 2014-04-10 | 2015-10-15 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| JP2019168846A (ja) * | 2018-03-22 | 2019-10-03 | トヨタ自動車株式会社 | 情報処理方法および情報処理装置 |
| JP2020020155A (ja) * | 2018-07-31 | 2020-02-06 | 株式会社小松製作所 | 作業機械を制御するためのシステム及び方法 |
| JP2020135674A (ja) * | 2019-02-24 | 2020-08-31 | 一 笠原 | 交通リスク情報出力システム、及び、交通リスク情報出力プログラム |
| JP2021056638A (ja) * | 2019-09-27 | 2021-04-08 | 日本電気株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| WO2021070848A1 (ja) * | 2019-10-11 | 2021-04-15 | 京セラ株式会社 | 交通通信システム、路側機、サーバ、及び交通通信方法 |
| JP2021140628A (ja) * | 2020-03-09 | 2021-09-16 | 矢崎エナジーシステム株式会社 | 警報システムおよび警報プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001229487A (ja) * | 2000-02-15 | 2001-08-24 | Minolta Co Ltd | 交通監視装置 |
| JP2009104531A (ja) * | 2007-10-25 | 2009-05-14 | Denso Corp | 潜在危険地点検出装置および車載危険地点通知装置 |
| JP2012038089A (ja) * | 2010-08-06 | 2012-02-23 | Nikon Corp | 情報管理装置、データ解析装置、信号機、サーバ、情報管理システム、およびプログラム |
| JP2012048310A (ja) * | 2010-08-24 | 2012-03-08 | Denso Corp | 運転支援システム、車載装置、情報配信装置 |
-
2012
- 2012-07-10 JP JP2012154757A patent/JP2014016883A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001229487A (ja) * | 2000-02-15 | 2001-08-24 | Minolta Co Ltd | 交通監視装置 |
| JP2009104531A (ja) * | 2007-10-25 | 2009-05-14 | Denso Corp | 潜在危険地点検出装置および車載危険地点通知装置 |
| JP2012038089A (ja) * | 2010-08-06 | 2012-02-23 | Nikon Corp | 情報管理装置、データ解析装置、信号機、サーバ、情報管理システム、およびプログラム |
| JP2012048310A (ja) * | 2010-08-24 | 2012-03-08 | Denso Corp | 運転支援システム、車載装置、情報配信装置 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015170113A (ja) * | 2014-03-06 | 2015-09-28 | 株式会社デンソー | 表示物情報表示装置 |
| WO2015133141A1 (ja) * | 2014-03-06 | 2015-09-11 | 株式会社デンソー | 表示物情報表示装置 |
| WO2015155990A1 (en) | 2014-04-10 | 2015-10-15 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| US10460598B2 (en) | 2014-04-10 | 2019-10-29 | Toyota Jidosha Kabushiki Kaisha | Driving action classifying apparatus and driving action classifying method |
| JP7063035B2 (ja) | 2018-03-22 | 2022-05-09 | トヨタ自動車株式会社 | 情報処理方法および情報処理装置 |
| JP2019168846A (ja) * | 2018-03-22 | 2019-10-03 | トヨタ自動車株式会社 | 情報処理方法および情報処理装置 |
| JP7204366B2 (ja) | 2018-07-31 | 2023-01-16 | 株式会社小松製作所 | 作業機械を制御するためのシステム及び方法 |
| WO2020026507A1 (ja) * | 2018-07-31 | 2020-02-06 | 株式会社小松製作所 | 作業機械を制御するためのシステム及び方法 |
| JP2020020155A (ja) * | 2018-07-31 | 2020-02-06 | 株式会社小松製作所 | 作業機械を制御するためのシステム及び方法 |
| US11795658B2 (en) | 2018-07-31 | 2023-10-24 | Komatsu Ltd. | System and method for controlling work machine |
| JP2020135674A (ja) * | 2019-02-24 | 2020-08-31 | 一 笠原 | 交通リスク情報出力システム、及び、交通リスク情報出力プログラム |
| JP7227577B2 (ja) | 2019-02-24 | 2023-02-22 | ジェネクスト株式会社 | 交通リスク情報出力システム、及び、交通リスク情報出力プログラム |
| JP2021056638A (ja) * | 2019-09-27 | 2021-04-08 | 日本電気株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| JP7388097B2 (ja) | 2019-09-27 | 2023-11-29 | 日本電気株式会社 | 情報処理装置、情報処理システム、情報処理方法、及びプログラム |
| WO2021070848A1 (ja) * | 2019-10-11 | 2021-04-15 | 京セラ株式会社 | 交通通信システム、路側機、サーバ、及び交通通信方法 |
| US11783709B2 (en) | 2019-10-11 | 2023-10-10 | Kyocera Corporation | Traffic communication system, roadside device, server, and traffic communication method |
| JP2021140628A (ja) * | 2020-03-09 | 2021-09-16 | 矢崎エナジーシステム株式会社 | 警報システムおよび警報プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014016883A (ja) | 危険個所報知システムおよび危険個所報知方法 | |
| JP5659939B2 (ja) | 車両検出システム、車載機およびセンター | |
| JP6459220B2 (ja) | 事故防止システム、事故防止装置、事故防止方法 | |
| JP4913683B2 (ja) | 危険度管理システム、サーバ装置及び危険度管理方法 | |
| JP6260912B2 (ja) | 渋滞箇所情報提供のための装置、方法、及びプログラム | |
| US10996073B2 (en) | Navigation system with abrupt maneuver monitoring mechanism and method of operation thereof | |
| US11003925B2 (en) | Event prediction system, event prediction method, program, and recording medium having same recorded therein | |
| US20170098371A1 (en) | Driving assistance information generation system, driving assistance information provision apparatus, driving assistance information generation method, and computer readable medium | |
| JP6690702B2 (ja) | 異常走行検出装置、異常走行検出方法とそのプログラム | |
| US11741839B2 (en) | Traffic safety assistance device, mobile information terminal, and program | |
| JP2010067234A (ja) | 運転支援装置および運転支援プログラム | |
| CN109937440B (zh) | 车载装置、便携终端装置、识别辅助系统以及识别辅助方法 | |
| JP5362225B2 (ja) | 運行記録機器及び運行状況記録方法 | |
| JP5874553B2 (ja) | 運転特性診断システム、運転特性診断装置 | |
| JP2020057133A (ja) | 情報処理装置、危険車両の情報を記憶させる方法、コンピュータプログラム、及び情報配信システム | |
| CN110271554A (zh) | 用于车辆的驾驶辅助系统和方法 | |
| US10540893B2 (en) | Information processor and vehicle system | |
| WO2015188450A1 (zh) | 预警处理方法和装置 | |
| JP2021022221A5 (ja) | ||
| US20230419837A1 (en) | Notification device for pedestrian, notification system for pedestrian, notification method for pedestrian, and non-transitory storage medium storing a program | |
| JP2016181041A (ja) | サーバ装置、情報処理方法及び情報処理プログラム | |
| JP7358053B2 (ja) | 違反検出装置、および違反検出方法 | |
| JP2005293032A (ja) | 車輌運転状況監視システム及びこのシステム用の車輌運転状況監視プログラム。 | |
| JP2019128697A (ja) | 情報処理方法及び情報処理装置 | |
| JP2019121233A (ja) | 車載用情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20131106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150610 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160802 |