JP2014106231A - ロックデバイスを有する、電気機械式腕時計の針を駆動するための機構 - Google Patents
ロックデバイスを有する、電気機械式腕時計の針を駆動するための機構 Download PDFInfo
- Publication number
- JP2014106231A JP2014106231A JP2013241637A JP2013241637A JP2014106231A JP 2014106231 A JP2014106231 A JP 2014106231A JP 2013241637 A JP2013241637 A JP 2013241637A JP 2013241637 A JP2013241637 A JP 2013241637A JP 2014106231 A JP2014106231 A JP 2014106231A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric actuator
- wheel
- electric motor
- gear wheels
- bolt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 title claims abstract description 54
- 229910001285 shape-memory alloy Inorganic materials 0.000 claims description 17
- 229920001746 electroactive polymer Polymers 0.000 claims description 15
- 229920000642 polymer Polymers 0.000 claims 1
- 230000004913 activation Effects 0.000 abstract 2
- 230000008878 coupling Effects 0.000 description 11
- 238000010168 coupling process Methods 0.000 description 11
- 238000005859 coupling reaction Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 3
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- OGIDPMRJRNCKJF-UHFFFAOYSA-N titanium oxide Inorganic materials [Ti]=O OGIDPMRJRNCKJF-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/14—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/08—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically
- G04C3/12—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically driven by piezoelectric means; driven by magneto-strictive means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Electromechanical Clocks (AREA)
Abstract
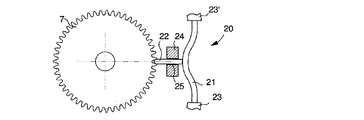
【解決手段】機構1は、電気機械式腕時計の針8、9を駆動する。機構1は、電気モータ2、電気モータ2に接続され、電気モータ2の各作動時に針8,9を前後に動かす1組のギヤホイール3、4、5、6、7、及びロックデバイス20を含む。ロックデバイス20は、静止モードにおいて、直接又はボルト22を介して1組のギヤホイール3、4、5、6、7のうちの1つのホイールをロックするための、圧電アクチュエータ21を含む。圧電アクチュエータ21は、圧電アクチュエータ21が電気モータ2の各作動の瞬間に電気信号によって作動している場合、1組のギヤホイール3、4、5、6、7を開放し、針を前後に動かす。
【選択図】図1
Description
2 電気モータ
3、4、5、6、7 ギヤホイール
4a アーバ
7a アーバ又は軸管
8、9 針
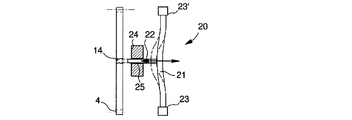
14 穴
20 ロックデバイス
21 圧電アクチュエータ
22 ボルト
23 第1の支持体
23’第2の支持体
24 ヒゲ持ち
25 貫通開口
Claims (12)
- 電気機械式腕時計の1つ若しくは複数の針(8、9)及び/又は少なくとも1つの日付ディスクを駆動するための機構(1)であって、
前記機構は、電気モータ(2)、前記電気モータに接続され、前記電気モータの各作動時に前記1つ若しくは複数の針(8、9)及び/又は前記日付ディスクを前後に動かす1組のギヤホイール(3、4、5、6、7)、並びに前記1組のギヤホイールの少なくとも1つのホイールをロックするためのデバイス(20)を含む、機構(1)において、
前記ロックデバイス(20)は、前記1組のギヤホイールを前記電気モータに接続して、前記電気モータの前記各作動時に、前記針(8、9)及び/又は前記日付ディスクを前後に動かすことを可能とする一方で、ボルト(22)を介して、前記電気モータの前記各作動の間に前記1組のギヤホイール(3、4、5、6、7)の前記少なくとも1つのホイールをロックするための、圧電アクチュエータ(21)又は電気活性ポリマー素子又は形状記憶合金素子を含むこと、並びに
前記ボルトは前記電気機械式腕時計の地板又はフレームに固定されるヒゲ持ち(24)の貫通開口(25)にガイドされること
を特徴とする、機構(1)。 - 電気機械式腕時計の1つ若しくは複数の針(8、9)及び/又は少なくとも1つの日付ディスクを駆動するための機構(1)であって、
前記機構は、電気モータ(2)、前記電気モータに接続され、前記電気モータの各作動時に前記1つ若しくは複数の針(8、9)及び/又は前記日付ディスクを前後に動かす1組のギヤホイール(3、4、5、6、7)、及び前記1組のギヤホイールの少なくとも1つのホイールをロックするためのデバイス(20)を含む、機構(1)において、
前記ロックデバイス(20)は、前記1組のギヤホイールを前記電気モータに接続して、前記電気モータの前記各作動時に、前記1つ若しくは複数の針(8、9)及び/又は前記日付ディスクを前後に動かすことを可能とする一方で、前記ホイールの表面又は前記ホイールのアーバを一部分で圧迫することにより、前記各作動の間に前記1組のギヤホイール(3、4、5、6、7)の前記少なくとも1つのホイールを直接ロックするための、圧電アクチュエータ(21)又は電気活性ポリマー素子又は形状記憶合金素子を含むことを特徴とする、機構(1)。 - 前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、前記アクチュエータが静止位置で電気的に作動していない場合、前記1組のギヤホイール(3、4、5、6、7)のうちの前記1つのホイールを、直接又は前記ボルト(22)を介してロックするよう構成されていること、並びに
前記アクチュエータは、前記アクチュエータが前記電気モータ(2)の前記各作動の瞬間に電気的に作動している場合、前記1組のギヤホイール(3、4、5、6、7)の前記ホイールを開放し、前記1つ若しくは複数の針(8、9)及び/又は前記日付ディスクを前後に動かすこと
を特徴とする、請求項1及び2に記載の駆動機構(1)。 - 前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、矩形のストリップであり、一方の端部において前記電気機械式腕時計の前記地板又は前記フレームの支持体(23)に固定されていること、及び
前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子の少なくとも1つの中間部分は、前記ボルト(22)を介して、前記1組のギヤホイール(3、4、5、6、7)のホイールのうちの1つをロックするように配設されること
を特徴とする、請求項1に記載の駆動機構(1)。 - 前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、矩形のストリップであり、その第1の端部は、前記電気機械式腕時計の前記地板又は前記フレームの前記第1の支持体(23)に固定され、第2の端部は、前記地板又は前記フレームの第2の支持体(23’)に固定して又は可動に保持されることを特徴とする、請求項1に記載の駆動機構(1)。
- 前記ボルト(22)は円筒形のロッドの形態であり、前記ボルト(22)の第1の端部は前記1組のギヤホイール(3、4、5、6、7)の歯付きホイールの2つの歯の間にロック位置で格納され、その一方で前記ボルト(22)の第2の端部は前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子によって圧迫されることを特徴とする、請求項1に記載の駆動機構(1)。
- 前記ボルト(22)は円筒形のロッドの形態であり、前記ボルト(22)の第1の端部は、前記1組のギヤホイール(3、4、5、6、7)の歯付きホイールに作製された複数の穴のうちの1つの穴(14)にロック位置で格納されるよう配設され、その一方で前記ボルト(22)の第2の端部は前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子によって圧迫されることを特徴とする、請求項1に記載の駆動機構(1)。
- 前記穴(14)の数は、前記1組のギヤホイール(3、4、5、6、7)の前記歯付きホイールの歯の数に等しいこと、及び
前記穴(14)は、前記ホイールと同心の円上に均等な間隔で配置されること
を特徴とする、請求項7に記載の駆動機構(1)。 - 矩形のストリップの形態の前記圧電アクチュエータ(21)は、歯付きホイール(4)のアーバ(4a)が横断する前記中間部分の貫通開口(26)を含み、前記中間部分は、前記歯付きホイールの下側表面をロック位置で圧迫するように構成されることを特徴とする、請求項2に記載の駆動機構(1)。
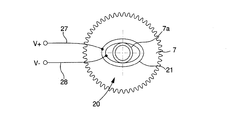
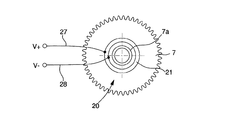
- 矩形のストリップの形態の前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、その一部が歯付きホイール(7)のアーバ(7a)を圧迫することにより、前記1組のギヤホイール(3、4、5、6、7)のうちの1つのホイールを直接ロックすることを特徴とする、請求項2に記載の駆動機構(1)。
- 前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、前記1組のギヤホイール(3、4、5、6、7)の前記歯付きホイール(7)のアーバ又は軸管(7a)に配設されるために、チューブの形状を取ること、
前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、ロック位置でクランプ留めされた前記歯付きホイールの前記アーバを保持するために、楕円形のチューブの形状を取ること、及び
前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、前記歯付きホイールを開放し、前記針(8、9)を前後に動かすことができるように、円形のチューブの形状を取ること
を特徴とする、請求項2に記載の駆動機構(1)。 - 前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子は、静止モードで電気的に作動していない場合は楕円形のチューブの形状を取り、前記圧電アクチュエータ(21)又は前記電気活性ポリマー素子又は前記形状記憶合金素子が電気信号によって作動している場合は円形のチューブの形状を取ることを特徴とする、請求項11に記載の駆動機構(1)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12194079.5A EP2735922A1 (fr) | 2012-11-23 | 2012-11-23 | Mécanisme d'entraînement d'aiguilles d'une montre électro-mécanique, muni d'un dispositif de verrouillage |
| EP12194079.5 | 2012-11-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014106231A true JP2014106231A (ja) | 2014-06-09 |
| JP5824022B2 JP5824022B2 (ja) | 2015-11-25 |
Family
ID=47552739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013241637A Active JP5824022B2 (ja) | 2012-11-23 | 2013-11-22 | ロックデバイスを有する、電気機械式腕時計の針を駆動するための機構 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9188960B2 (ja) |
| EP (2) | EP2735922A1 (ja) |
| JP (1) | JP5824022B2 (ja) |
| CN (2) | CN103838133B (ja) |
| HK (1) | HK1186058A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190106813A (ko) * | 2018-03-09 | 2019-09-18 | 에타 쏘시에떼 아노님 마누팍투레 홀로게레 스위세 | 톱니형 휠을 회전하기 위한 디바이스 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2735922A1 (fr) * | 2012-11-23 | 2014-05-28 | ETA SA Manufacture Horlogère Suisse | Mécanisme d'entraînement d'aiguilles d'une montre électro-mécanique, muni d'un dispositif de verrouillage |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62191396U (ja) * | 1986-05-23 | 1987-12-05 | ||
| JPS6323570A (ja) * | 1986-07-15 | 1988-01-30 | Hitachi Ltd | 回転アクチユエ−タ |
| JPH01158261A (ja) * | 1987-09-18 | 1989-06-21 | Wellman Bibby Co Ltd:The | 逆転防止装置 |
| JPH0614984U (ja) * | 1992-07-24 | 1994-02-25 | シチズン時計株式会社 | 電子時計の逆伝達防止装置 |
| JP2006519117A (ja) * | 2003-03-05 | 2006-08-24 | サントル、ナショナール、ド、ラ、ルシェルシュ、シアンティフィク、(セーエヌエルエス) | ヒステリシス駆動動作を発生させるアクチュエータを備えるマイクロ電気機械システム・デバイス |
| JP2008122390A (ja) * | 2006-11-13 | 2008-05-29 | Eta Sa Manufacture Horlogere Suisse | Memsマイクロモータを含む駆動モジュール、このモジュールの製造のためのプロセス、およびこのモジュールを備えた計時器 |
| JP2010096766A (ja) * | 2008-10-16 | 2010-04-30 | Eta Sa Manufacture Horlogere Suisse | 時計駆動モジュールのためのロック機構 |
| JP2010233336A (ja) * | 2009-03-26 | 2010-10-14 | Seiko Epson Corp | 圧電モーター、液体噴射装置及び時計 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT592599A (ja) * | 1957-07-11 | |||
| CH1022068A4 (ja) * | 1968-07-09 | 1971-06-15 | ||
| US3504206A (en) * | 1968-08-27 | 1970-03-31 | Hamilton Watch Co | Indexing mechanism |
| JPS53110559A (en) * | 1977-03-08 | 1978-09-27 | Citizen Watch Co Ltd | Electronic watch |
| CH626495B (fr) * | 1977-05-02 | Universo Sa | Dispositif moteur pour garde-temps a affichage analogique. | |
| CH654170GA3 (ja) * | 1983-08-22 | 1986-02-14 | ||
| CN1014554B (zh) * | 1987-06-03 | 1991-10-30 | 精工爱普生株式会社 | 电子时计 |
| JP2814068B2 (ja) * | 1994-10-25 | 1998-10-22 | セイコークロック株式会社 | 秒針停止装置付き時計機械体 |
| CN1507687A (zh) * | 2002-03-01 | 2004-06-23 | ������������ʽ���� | 压电致动器及具有压电致动器的钟表以及便携装置 |
| DE602005005878T2 (de) * | 2004-02-19 | 2009-05-20 | Seiko Epson Corp. | Elektronische Uhr mit Kalendersfunktion und Verfahren zum Ansteuern dieser Uhr |
| JP4141990B2 (ja) * | 2004-07-12 | 2008-08-27 | セイコーエプソン株式会社 | 圧電アクチュエータおよび機器 |
| CN1921282A (zh) * | 2005-08-22 | 2007-02-28 | 精工爱普生株式会社 | 压电致动器的驱动控制装置和驱动控制方法、电子设备 |
| CH699771A2 (fr) * | 2008-10-16 | 2010-04-30 | Eta Sa Mft Horlogere Suisse | Mécanisme de blocage pour module d'entraînement horloger. |
| CH705679B1 (fr) * | 2011-10-28 | 2017-01-31 | Swatch Group Res & Dev Ltd | Circuit d'autorégulation de la fréquence d'oscillation d'un système mécanique oscillant, et dispositif le comprenant. |
| EP2735922A1 (fr) * | 2012-11-23 | 2014-05-28 | ETA SA Manufacture Horlogère Suisse | Mécanisme d'entraînement d'aiguilles d'une montre électro-mécanique, muni d'un dispositif de verrouillage |
-
2012
- 2012-11-23 EP EP12194079.5A patent/EP2735922A1/fr not_active Withdrawn
-
2013
- 2013-10-21 EP EP13189578.1A patent/EP2735923B1/fr active Active
- 2013-11-18 US US14/082,357 patent/US9188960B2/en active Active
- 2013-11-22 CN CN201310591626.XA patent/CN103838133B/zh active Active
- 2013-11-22 CN CN201320741466.8U patent/CN203858461U/zh not_active Expired - Lifetime
- 2013-11-22 HK HK13113072.9A patent/HK1186058A2/xx not_active IP Right Cessation
- 2013-11-22 JP JP2013241637A patent/JP5824022B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62191396U (ja) * | 1986-05-23 | 1987-12-05 | ||
| JPS6323570A (ja) * | 1986-07-15 | 1988-01-30 | Hitachi Ltd | 回転アクチユエ−タ |
| JPH01158261A (ja) * | 1987-09-18 | 1989-06-21 | Wellman Bibby Co Ltd:The | 逆転防止装置 |
| JPH0614984U (ja) * | 1992-07-24 | 1994-02-25 | シチズン時計株式会社 | 電子時計の逆伝達防止装置 |
| JP2006519117A (ja) * | 2003-03-05 | 2006-08-24 | サントル、ナショナール、ド、ラ、ルシェルシュ、シアンティフィク、(セーエヌエルエス) | ヒステリシス駆動動作を発生させるアクチュエータを備えるマイクロ電気機械システム・デバイス |
| JP2008122390A (ja) * | 2006-11-13 | 2008-05-29 | Eta Sa Manufacture Horlogere Suisse | Memsマイクロモータを含む駆動モジュール、このモジュールの製造のためのプロセス、およびこのモジュールを備えた計時器 |
| JP2010096766A (ja) * | 2008-10-16 | 2010-04-30 | Eta Sa Manufacture Horlogere Suisse | 時計駆動モジュールのためのロック機構 |
| JP2010233336A (ja) * | 2009-03-26 | 2010-10-14 | Seiko Epson Corp | 圧電モーター、液体噴射装置及び時計 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190106813A (ko) * | 2018-03-09 | 2019-09-18 | 에타 쏘시에떼 아노님 마누팍투레 홀로게레 스위세 | 톱니형 휠을 회전하기 위한 디바이스 |
| JP2019162021A (ja) * | 2018-03-09 | 2019-09-19 | ウーテーアー・エス・アー・マニファクチュール・オロロジェール・スイス | 歯車を回転させるための機器 |
| KR102269430B1 (ko) * | 2018-03-09 | 2021-06-25 | 에타 쏘시에떼 아노님 마누팍투레 홀로게레 스위세 | 톱니형 휠을 회전하기 위한 디바이스 |
| US11428298B2 (en) | 2018-03-09 | 2022-08-30 | Eta Sa Manufacture Horlogere Suisse | Device for rotating a toothed wheel |
Also Published As
| Publication number | Publication date |
|---|---|
| US9188960B2 (en) | 2015-11-17 |
| CN103838133A (zh) | 2014-06-04 |
| JP5824022B2 (ja) | 2015-11-25 |
| US20140146645A1 (en) | 2014-05-29 |
| EP2735923A1 (fr) | 2014-05-28 |
| HK1186058A2 (en) | 2014-03-07 |
| EP2735922A1 (fr) | 2014-05-28 |
| HK1198722A1 (en) | 2015-05-29 |
| EP2735923B1 (fr) | 2019-04-24 |
| CN203858461U (zh) | 2014-10-01 |
| CN103838133B (zh) | 2017-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5543183B2 (ja) | 慣性結合機構を備えた時計ムーブメント | |
| JPWO1999007063A1 (ja) | アクチュエータ、およびそれを用いた時計並びに報知装置 | |
| EP1895650A1 (en) | Piezoelectric actuator and electronic device having the same | |
| KR20120011793A (ko) | 이중 디스플레이 시계 | |
| CN101783614B (zh) | 压电驱动装置和电子设备 | |
| JP2008125348A (ja) | Memsマイクロモータおよびこのマイクロモータを装備する時計 | |
| JP5824022B2 (ja) | ロックデバイスを有する、電気機械式腕時計の針を駆動するための機構 | |
| KR101373870B1 (ko) | 시계 휠을 가진 mems 마이크로모터의 기계적인인터페이싱을 위한 장치 및 상기 장치를 포함하는 타임피스 | |
| CN108475040A (zh) | 带有跳动显示机构的钟表机芯 | |
| JP3594013B2 (ja) | 時計装置 | |
| US6515941B1 (en) | Electronic watch | |
| JP3575427B2 (ja) | 計時装置 | |
| US8289816B2 (en) | Chronograph timepiece | |
| JP2008020212A (ja) | 時計 | |
| JP2009210580A (ja) | ステップ秒針表示機構 | |
| HK1198722B (en) | Mechanism for driving the hands of an electromechanical watch, provided with a locking device | |
| JP2010096766A (ja) | 時計駆動モジュールのためのロック機構 | |
| KR20020051840A (ko) | 날짜 표시기에 대한 순간 구동 장치 | |
| CN119895337A (zh) | 钟表机构的驱动装置 | |
| JP2015169660A (ja) | 特に日付リングであるアナログインジケータを駆動するためのデバイス | |
| JP2013221881A (ja) | 情報表示装置および電子時計 | |
| JP4218666B2 (ja) | 圧電アクチュエータ、および電子機器 | |
| JP2000188882A (ja) | 駆動装置、カレンダー表示装置、携帯機器および時計 | |
| JP7207011B2 (ja) | 時計 | |
| JP4904683B2 (ja) | 時計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150116 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150407 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150715 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150908 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151008 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5824022 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |