JP2014108662A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2014108662A JP2014108662A JP2012262647A JP2012262647A JP2014108662A JP 2014108662 A JP2014108662 A JP 2014108662A JP 2012262647 A JP2012262647 A JP 2012262647A JP 2012262647 A JP2012262647 A JP 2012262647A JP 2014108662 A JP2014108662 A JP 2014108662A
- Authority
- JP
- Japan
- Prior art keywords
- target current
- calculation unit
- road
- vehicle
- map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】道路の種類に応じたアシスト力とすることができる技術を提供する。
【解決手段】車両に設けられたステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに供給する目標電流を設定する目標電流算出部と、を備え、目標電流算出部は、電動モータに供給する目標電流を設定するための制御マップを、車両が走行すると予測される複数の種類の道路のそれぞれに対応するように複数有する。
【選択図】図4
【解決手段】車両に設けられたステアリングホイールの操作に対するアシスト力を付与する電動モータと、電動モータに供給する目標電流を設定する目標電流算出部と、を備え、目標電流算出部は、電動モータに供給する目標電流を設定するための制御マップを、車両が走行すると予測される複数の種類の道路のそれぞれに対応するように複数有する。
【選択図】図4
Description
本発明は、電動パワーステアリング装置に関する。
近年、車両のステアリング系に電動モータを備え、電動モータの動力にて運転者の操舵力をアシストする電動パワーステアリング装置が提案されている。
この電動パワーステアリング装置の電動モータの駆動は、制御装置にて制御される。制御装置は、電動モータの駆動を制御するために、先ず、操舵トルクや車速などに応じて電動モータに供給する目標電流を設定する。例えば、特許文献1に記載の電動パワーステアリング装置の制御装置においては、目標電流算出部が、予め経験則に基づいて作成しROMに記憶しておいたマップに基づいて、操舵トルクに基づいて算出した目標補助トルクを電動モータが供給するのに必要となる目標電流を算出する。
この電動パワーステアリング装置の電動モータの駆動は、制御装置にて制御される。制御装置は、電動モータの駆動を制御するために、先ず、操舵トルクや車速などに応じて電動モータに供給する目標電流を設定する。例えば、特許文献1に記載の電動パワーステアリング装置の制御装置においては、目標電流算出部が、予め経験則に基づいて作成しROMに記憶しておいたマップに基づいて、操舵トルクに基づいて算出した目標補助トルクを電動モータが供給するのに必要となる目標電流を算出する。
車両が走行する道路が高速道路である場合は、一般道路よりも直線が多くカーブも緩やかであるため、一般的には、高速道路の走行には一般道路の走行よりも直進安定性が求められる。このように、車両が走行する道路に応じて電動モータに求められるアシスト力が変わってくる。
本発明は、道路の種類に応じたアシスト力とすることができる電動パワーステアリング装置を提供することを目的とする。
本発明は、道路の種類に応じたアシスト力とすることができる電動パワーステアリング装置を提供することを目的とする。
かかる目的のもと、本発明は、車両に設けられたステアリングホイールの操作に対するアシスト力を付与する電動モータと、前記電動モータに供給する目標電流を設定する目標電流設定手段と、を備え、前記目標電流設定手段は、前記電動モータに供給する目標電流を設定するための制御マップを、前記車両が走行すると予測される複数の種類の道路のそれぞれに対応するように複数有することを特徴とする電動パワーステアリング装置である。
ここで、前記目標電流設定手段は、前記車両が走行している道路の種類を把握し、複数有する前記制御マップの中から把握した道路の種類に対応する制御マップを選択して用いて定めた値に基づいて前記目標電流を設定するとよい。
また、前記目標電流設定手段は、高速道路に対応する制御マップと一般道路に対応する制御マップとを有し、前記車両が走行する道路が高速道路である場合には当該高速道路に対応する制御マップを用いて定めた値に基づいて前記目標電流を設定し、当該車両が走行する道路が一般道路である場合には当該一般道路に対応する制御マップを用いて定めた値に基づいて当該目標電流を設定するとよい。
また、前記目標電流設定手段は、高速道路に対応する制御マップと一般道路に対応する制御マップとを有し、前記車両が走行する道路が高速道路である場合には当該高速道路に対応する制御マップを用いて定めた値に基づいて前記目標電流を設定し、当該車両が走行する道路が一般道路である場合には当該一般道路に対応する制御マップを用いて定めた値に基づいて当該目標電流を設定するとよい。
ここで、前記目標電流設定手段は、前記車両が走行する道路が高速道路であるとしても当該車両の移動速度が所定速度以下である場合には前記一般道路に対応する制御マップを用いて定めた値に基づいて当該目標電流を設定するとよい。
また、前記ステアリングホイールの操舵方向が切り増し方向である場合、当該ステアリングホイールの操舵トルクおよび前記車両の移動速度が同じだとしても、前記高速道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流は、前記一般道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流よりも小さいとよい。
ここで、前記目標電流設定手段は、前記車両に搭載されたナビゲーションシステムあるいはETC装置からの出力信号に基づいて当該車両が走行している道路の種類を把握するとよい。
また、前記ステアリングホイールの操舵方向が切り増し方向である場合、当該ステアリングホイールの操舵トルクおよび前記車両の移動速度が同じだとしても、前記高速道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流は、前記一般道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流よりも小さいとよい。
ここで、前記目標電流設定手段は、前記車両に搭載されたナビゲーションシステムあるいはETC装置からの出力信号に基づいて当該車両が走行している道路の種類を把握するとよい。
本発明によれば、道路の種類に応じたアシスト力とすることができる。
以下、添付図面を参照して、本発明の実施の形態について詳細に説明する。
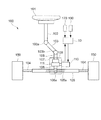
図1は、実施の形態に係る電動パワーステアリング装置100の概略構成を示す図である。
電動パワーステアリング装置100(以下、単に「ステアリング装置100」と称する場合もある。)は、車両の進行方向を任意に変えるためのかじ取り装置であり、本実施の形態においては車両の一例としての自動車に適用した構成を例示している。
図1は、実施の形態に係る電動パワーステアリング装置100の概略構成を示す図である。
電動パワーステアリング装置100(以下、単に「ステアリング装置100」と称する場合もある。)は、車両の進行方向を任意に変えるためのかじ取り装置であり、本実施の形態においては車両の一例としての自動車に適用した構成を例示している。
ステアリング装置100は、自動車の進行方向を変えるために運転者が操作する車輪(ホイール)状のステアリングホイール(ハンドル)101と、ステアリングホイール101に一体的に設けられたステアリングシャフト102とを備えている。また、ステアリング装置100は、ステアリングシャフト102と自在継手103aを介して連結された上部連結シャフト103と、この上部連結シャフト103と自在継手103bを介して連結された下部連結シャフト108とを備えている。下部連結シャフト108は、ステアリングホイール101の回転に連動して回転する。
また、ステアリング装置100は、転動輪としての左右の前輪150のそれぞれに連結されたタイロッド104と、タイロッド104に連結されたラック軸105とを備えている。また、ステアリング装置100は、ラック軸105に形成されたラック歯105aとともにラック・ピニオン機構を構成するピニオン106aを備えている。ピニオン106aは、ピニオンシャフト106の下端部に形成されている。
また、ステアリング装置100は、ピニオンシャフト106を収納するステアリングギアボックス107を有している。ピニオンシャフト106は、ステアリングギアボックス107にてトーションバー(不図示)を介して下部連結シャフト108と連結されている。ステアリングギアボックス107の内部には、下部連結シャフト108とピニオンシャフト106との相対角度に基づいてステアリングホイール101の操舵トルクTを検出するトルクセンサ109が設けられている。
また、ステアリング装置100は、ステアリングギアボックス107に支持された電動モータ110と、電動モータ110の駆動力を減速してピニオンシャフト106に伝達する減速機構111とを有している。本実施の形態に係る電動モータ110は、3相ブラシレスモータである。減速機構111は、例えば、ピニオンシャフト106に固定されたウォームホイール(不図示)と、電動モータ110の出力軸に固定されたウォームギヤ(不図示)などから構成される。
また、ステアリング装置100は、電動モータ110の作動を制御する制御装置10を備えている。制御装置10には、上述したトルクセンサ109からの出力信号が入力される。また、制御装置10には、自動車に搭載される各種の機器を制御するための信号を流す通信を行うネットワーク(CAN)を介して、自動車の移動速度である車速Vcを検出する車速センサ170、自動車に設けられて、自動車が走行している現在位置や道路の情報を出力するナビゲーションシステム190、などからの出力信号が入力される。
以上のように構成されたステアリング装置100は、ステアリングホイール101に加えられた操舵トルクTをトルクセンサ109にて検出し、その検出トルクに応じて電動モータ110を駆動し、電動モータ110の発生トルクをピニオンシャフト106に伝達する。これにより、電動モータ110の発生トルクが、ステアリングホイール101に加える運転者の操舵力をアシストする。
次に、制御装置10について説明する。
図2は、制御装置10の概略構成図である。
制御装置10は、CPU、ROM、RAM、バックアップRAM等からなる算術論理演算回路である。
制御装置10には、上述したトルクセンサ109にて検出された操舵トルクTが出力信号に変換されたトルク信号Tdと、車速センサ170にて検出された車速Vcが出力信号に変換された車速信号vなどが入力される。また、制御装置10には、ナビゲーションシステム190から出力された、自動車が走行している現在位置や道路の情報を含むナビ信号nが入力される。
そして、制御装置10は、トルク信号Td、車速信号vおよびナビ信号nに基づいて目標補助トルクを算出し、この目標補助トルクを電動モータ110が供給するのに必要となる目標電流Itを算出する目標電流設定手段の一例としての目標電流算出部20と、目標電流算出部20が算出した目標電流Itに基づいてフィードバック制御などを行う制御部30とを有している。
図2は、制御装置10の概略構成図である。
制御装置10は、CPU、ROM、RAM、バックアップRAM等からなる算術論理演算回路である。
制御装置10には、上述したトルクセンサ109にて検出された操舵トルクTが出力信号に変換されたトルク信号Tdと、車速センサ170にて検出された車速Vcが出力信号に変換された車速信号vなどが入力される。また、制御装置10には、ナビゲーションシステム190から出力された、自動車が走行している現在位置や道路の情報を含むナビ信号nが入力される。
そして、制御装置10は、トルク信号Td、車速信号vおよびナビ信号nに基づいて目標補助トルクを算出し、この目標補助トルクを電動モータ110が供給するのに必要となる目標電流Itを算出する目標電流設定手段の一例としての目標電流算出部20と、目標電流算出部20が算出した目標電流Itに基づいてフィードバック制御などを行う制御部30とを有している。
次に、目標電流算出部20について詳述する。
目標電流算出部20は、目標電流を設定する上で基準となるベース電流を算出するベース電流算出部21と、電動モータ110の慣性モーメントを打ち消すための電流を算出するイナーシャ補償電流算出部22と、モータの回転を制限する電流を算出するダンパー補償電流算出部23とを備えている。また、目標電流算出部20は、ベース電流算出部21、イナーシャ補償電流算出部22、ダンパー補償電流算出部23にて算出された値に基づいて目標電流Itを決定する目標電流決定部25を備えている。
目標電流算出部20は、目標電流を設定する上で基準となるベース電流を算出するベース電流算出部21と、電動モータ110の慣性モーメントを打ち消すための電流を算出するイナーシャ補償電流算出部22と、モータの回転を制限する電流を算出するダンパー補償電流算出部23とを備えている。また、目標電流算出部20は、ベース電流算出部21、イナーシャ補償電流算出部22、ダンパー補償電流算出部23にて算出された値に基づいて目標電流Itを決定する目標電流決定部25を備えている。
なお、目標電流算出部20には、トルク信号Td、車速信号v、ナビ信号n、電動モータ110の回転速度Nmが出力信号に変換された回転速度信号Nmsなどが入力される。回転速度信号Nmsは、例えば3相ブラシレスモータである電動モータ110の回転子(ロータ)の回転位置を検出するセンサ(例えば、回転子の回転位置を検出するレゾルバ、ロータリエンコーダ等で構成されるロータ位置検出回路)にて検出された電動モータ110の回転角度が微分されることにより得られた値が出力信号に変換されたものであることを例示することができる。
ベース電流算出部21は、位相補償部26にてトルク信号Tdが位相補償されたトルク信号Tsと、車速センサ170からの車速信号vと、ナビゲーションシステム190からのナビ信号nなどに基づいてベース電流Ibを算出する。つまり、ベース電流算出部21は、位相補償された操舵トルクTと、車速Vcとに応じたベース電流Ibを算出する。その際、ベース電流算出部21は、後述するように、自動車1が走行している道路の種類を加味する。
イナーシャ補償電流算出部22は、トルク信号Tsと、車速信号vと、ナビ信号nとに基づいて電動モータ110およびシステムの慣性モーメントを打ち消すためのイナーシャ補償電流を算出する。つまり、イナーシャ補償電流算出部22は、操舵トルクT(トルク信号Td)と、車速Vc(車速信号v)とに応じたイナーシャ補償電流Isを算出する。その際、イナーシャ補償電流算出部22は、後述するように、自動車1が走行している道路の種類を加味する。
ダンパー補償電流算出部23は、トルク信号Tsと、車速信号vと、ナビ信号nと、電動モータ110の回転速度信号Nmsとに基づいて、電動モータ110の回転を制限するダンパー補償電流Idを算出する。つまり、ダンパー補償電流算出部23は、操舵トルクT(トルク信号Td)と、車速Vc(車速信号v)と、電動モータ110の回転速度Nm(回転速度信号Nms)に応じたダンパー補償電流Idを算出する。その際、ダンパー補償電流算出部23は、後述するように、自動車1が走行している道路の種類を加味する。
これらベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23については後で詳述する。
これらベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23については後で詳述する。
目標電流決定部25は、先ず、ベース電流算出部21にて算出されたベース電流Ib、イナーシャ補償電流算出部22にて算出されたイナーシャ補償電流Isおよびダンパー補償電流算出部23にて算出されたダンパー補償電流Idに基づいて目標電流Itを決定する。目標電流決定部25は、例えば、ステアリングホイール101の操舵方向が切り増し方向であるときには、ベース電流Ibに、イナーシャ補償電流Isを加算するとともにダンパー補償電流Idを減算して得た電流を目標電流Itとして決定する。
次に、制御部30について詳述する。
制御部30は、図2に示すように、電動モータ110の作動を制御するモータ駆動制御部31と、電動モータ110を駆動させるモータ駆動部32と、電動モータ110に実際に流れる実電流Imを検出するモータ電流検出部33とを有している。
モータ駆動制御部31は、目標電流算出部20にて最終的に決定された目標電流ITFと、モータ電流検出部33にて検出された電動モータ110へ供給される実電流Imとの偏差に基づいてフィードバック制御を行うフィードバック(F/B)制御部40と、電動モータ110をPWM駆動するためのPWM(パルス幅変調)信号を生成するPWM信号生成部60とを有している。
制御部30は、図2に示すように、電動モータ110の作動を制御するモータ駆動制御部31と、電動モータ110を駆動させるモータ駆動部32と、電動モータ110に実際に流れる実電流Imを検出するモータ電流検出部33とを有している。
モータ駆動制御部31は、目標電流算出部20にて最終的に決定された目標電流ITFと、モータ電流検出部33にて検出された電動モータ110へ供給される実電流Imとの偏差に基づいてフィードバック制御を行うフィードバック(F/B)制御部40と、電動モータ110をPWM駆動するためのPWM(パルス幅変調)信号を生成するPWM信号生成部60とを有している。
フィードバック制御部40は、目標電流算出部20にて最終的に決定された目標電流Itとモータ電流検出部33にて検出された実電流Imとの偏差を求める偏差演算部41と、その偏差がゼロとなるようにフィードバック処理を行うフィードバック(F/B)処理部42とを有している。
フィードバック(F/B)処理部42は、目標電流Itと実電流Imとが一致するようにフィードバック制御を行うものであり、例えば、偏差演算部41にて算出された偏差に対して、比例要素で比例処理し、積分要素で積分処理し、加算演算部でこれらの値を加算する。
PWM信号生成部60は、フィードバック制御部40からの出力値に基づいて電動モータ110をPWM(パルス幅変調)駆動するためのPWM信号を生成し、生成したPWM信号60aを出力する。
PWM信号生成部60は、フィードバック制御部40からの出力値に基づいて電動モータ110をPWM(パルス幅変調)駆動するためのPWM信号を生成し、生成したPWM信号60aを出力する。
モータ駆動部32は、所謂インバータであり、例えば、スイッチング素子として6個の独立したトランジスタ(FET)を備え、6個の内の3個のトランジスタは電源の正極側ラインと各相の電気コイルとの間に接続され、他の3個のトランジスタは各相の電気コイルと電源の負極側(アース)ラインと接続されている。そして、6個の中から選択した2個のトランジスタのゲートを駆動してこれらのトランジスタをスイッチング動作させることにより、電動モータ110の駆動を制御する。
モータ電流検出部33は、モータ駆動部32に接続されたシャント抵抗の両端に生じる電圧から電動モータ110に流れる実電流Imの値を検出する。
モータ電流検出部33は、モータ駆動部32に接続されたシャント抵抗の両端に生じる電圧から電動モータ110に流れる実電流Imの値を検出する。
次に、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23について詳述する。
図3は、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23の概略構成を示す図である。
ベース電流算出部21は、位相補償された操舵トルクT(トルク信号Ts)と仮のベース電流Ibaとの対応を示す制御マップに操舵トルクT(トルク信号Ts)を代入することにより得られた仮のベース電流Ibaに、車速Vc(車速信号v)と車速レシオRbvとの対応を示す制御マップに車速Vc(車速信号v)を代入することにより得られた車速レシオRbvを乗算することによりベース電流Ibを算出する(Ib=Iba×Rbv)。
図3は、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23の概略構成を示す図である。
ベース電流算出部21は、位相補償された操舵トルクT(トルク信号Ts)と仮のベース電流Ibaとの対応を示す制御マップに操舵トルクT(トルク信号Ts)を代入することにより得られた仮のベース電流Ibaに、車速Vc(車速信号v)と車速レシオRbvとの対応を示す制御マップに車速Vc(車速信号v)を代入することにより得られた車速レシオRbvを乗算することによりベース電流Ibを算出する(Ib=Iba×Rbv)。
イナーシャ補償電流算出部22は、位相補償された操舵トルクT(トルク信号Ts)の微分値と仮のイナーシャ補償電流Isaとの対応を示す制御マップに操舵トルクT(トルク信号Ts)の微分値を代入することにより得られた仮のイナーシャ補償電流Isaに、後述するように導き出された車速レシオRsvと、トルクレシオRstとを乗算することによりイナーシャ補償電流Isを算出する。イナーシャ補償電流算出部22は、車速レシオRsvを、車速Vc(車速信号v)と車速レシオRsvとの対応を示す制御マップに車速Vc(車速信号v)を代入することにより算出し、トルクレシオRstを、位相補償された操舵トルクT(トルク信号Ts)とトルクレシオRstとの対応を示す制御マップに位相補償された操舵トルクT(トルク信号Ts)を代入することにより算出する(Is=Isa×Rsv×Rst)。
ダンパー補償電流算出部23は、回転速度Nm(回転速度信号Nms)と仮のダンパー補償電流Idaとの対応を示す制御マップに回転速度Nm(回転速度信号Nms)を代入することにより得られた仮のダンパー補償電流Idaに、後述するように導き出された車速レシオRdvと、トルクレシオRdtとを乗算することによりダンパー補償電流Idを算出する。ダンパー補償電流算出部23は、車速レシオRdvを、車速Vc(車速信号v)と車速レシオRdvとの対応を示す制御マップに車速Vc(車速信号v)を代入することにより算出し、トルクレシオRdtを、位相補償された操舵トルクT(トルク信号Ts)とトルクレシオRdtとの対応を示す制御マップに位相補償された操舵トルクT(トルク信号Ts)を代入することにより算出する(Id=Ida×Rdv×Rdt)。
上述したように、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、予め経験則に基づいて作成しROMに記憶しておいた、各種の制御マップに基づいて、それぞれベース電流Ib、イナーシャ補償電流Is、ダンパー補償電流Idを算出する。そして、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、各種制御マップとして、自動車が走行すると予測される複数の種類の道路のそれぞれに対応するように複数の制御マップを有する。本実施の形態に係るベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23においては、それぞれ、自動車が高速道路を走行する際に用いる高速道路用制御マップ(以下、「Hマップ」と称す。)と、一般道路を走行する際に用いる一般道路用制御マップ(以下、「Pマップ」と称す。)と、を有している。
そして、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、Hマップ、Pマップのうち、自動車が走行している道路に対応するマップを選択し、そのマップを用いて、ベース電流Ib、イナーシャ補償電流Is、ダンパー補償電流Idを算出する。ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、自動車が走行している道路を、ナビゲーションシステム190からのナビ信号nに基づいて把握する。つまり、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、ナビ信号nに基づいて、自動車が走行している道路が高速道路であると把握した場合にはHマップを用いて、ベース電流Ib、イナーシャ補償電流Is、ダンパー補償電流Idを算出する。他方、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は、ナビ信号nに基づいて、自動車が走行している道路が一般道路であると把握した場合にはPマップを用いて、ベース電流Ib、イナーシャ補償電流Is、ダンパー補償電流Idを算出する。
ところで、車両が走行する道路が高速道路である場合は、一般道路よりも直線が多くカーブも緩やかであるため、高速道路の走行には一般道路の走行よりも直進安定性を高め、一般道路の走行には高速道路の走行よりも操舵力を弱める方が望ましい。かかる事項に鑑み、本実施の形態に係る目標電流算出部20においては、HマップおよびPマップは以下のように設定されている。
図4は、ベース電流算出部21がベース電流Ibを算出するのに用いる制御マップにおけるHマップとPマップとを示す図である。図4(a)は、位相補償された操舵トルクT(トルク信号Ts)と仮のベース電流Ibaとの対応を示す制御マップであり、図4(b)は、車速Vc(車速信号v)と車速レシオRbvとの対応を示す制御マップである。
ベース電流算出部21がベース電流Ibを算出するのに用いる制御マップにおいては、操舵トルクTが同じであるとしても、Hマップを用いて算出する仮のベース電流Ibaの方がPマップを用いて算出する仮のベース電流Ibaよりも小さくなるように設定されている。また、車速Vcが同じであるとしても、Hマップを用いて算出する車速レシオRbvの方がPマップを用いて算出する車速レシオRbvよりも小さくなるように設定されている。これらにより、本実施の形態に係るベース電流算出部21によれば、Hマップを用いて算出するベース電流Ibの方がPマップを用いて算出するベース電流Ibよりも小さくなる。
ベース電流算出部21がベース電流Ibを算出するのに用いる制御マップにおいては、操舵トルクTが同じであるとしても、Hマップを用いて算出する仮のベース電流Ibaの方がPマップを用いて算出する仮のベース電流Ibaよりも小さくなるように設定されている。また、車速Vcが同じであるとしても、Hマップを用いて算出する車速レシオRbvの方がPマップを用いて算出する車速レシオRbvよりも小さくなるように設定されている。これらにより、本実施の形態に係るベース電流算出部21によれば、Hマップを用いて算出するベース電流Ibの方がPマップを用いて算出するベース電流Ibよりも小さくなる。
図5は、イナーシャ補償電流算出部22がイナーシャ補償電流Isを算出するのに用いる制御マップにおけるHマップとPマップとを示す図である。図5(a)は、操舵トルクT(トルク信号Ts)の微分値と仮のイナーシャ補償電流Isaとの対応を示す制御マップであり、図5(b)は、車速Vc(車速信号v)と車速レシオRsvとの対応を示す制御マップであり、図5(c)は、位相補償された操舵トルクT(トルク信号Ts)とトルクレシオRstとの対応を示す制御マップである。
イナーシャ補償電流算出部22がイナーシャ補償電流Isを算出するのに用いる制御マップにおいては、操舵トルクT(トルク信号Ts)の微分値が同じであるとしても、Hマップを用いて算出する仮のイナーシャ補償電流Isaの方がPマップを用いて算出する仮のイナーシャ補償電流Isaよりも小さくなるように設定されている。また、車速Vcが同じであるとしても、Hマップを用いて算出する車速レシオRsvの方がPマップを用いて算出する車速レシオRsvよりも小さくなるように設定されている。また、操舵トルクTが同じであるとしても、Hマップを用いて算出するトルクレシオRstの方がPマップを用いて算出するトルクレシオRstよりも小さくなるように設定されている。これらにより、本実施の形態に係るイナーシャ補償電流算出部22によれば、Hマップを用いて算出するイナーシャ補償電流Isの方がPマップを用いて算出するイナーシャ補償電流Isよりも小さくなる。
図6は、ダンパー補償電流算出部23がダンパー補償電流Idを算出するのに用いる制御マップにおけるHマップとPマップとを示す図である。図6(a)は、回転速度Nm(回転速度信号Nms)と仮のダンパー補償電流Idaとの対応を示す制御マップであり、図6(b)は、車速Vc(車速信号v)と車速レシオRdvとの対応を示す制御マップであり、図6(c)は、位相補償された操舵トルクT(トルク信号Ts)とトルクレシオRdtとの対応を示す制御マップである。
ダンパー補償電流算出部23がダンパー補償電流Idを算出するのに用いる制御マップにおいては、回転速度Nm(回転速度信号Nms)が同じであるとしても、Hマップを用いて算出する仮のダンパー補償電流Idaの方がPマップを用いて算出する仮のダンパー補償電流Idよりも大きくなるように設定されている。また、車速Vcが同じであるとしても、Hマップを用いて算出する車速レシオRdvの方がPマップを用いて算出する車速レシオRdvよりも大きくなるように設定されている。また、操舵トルクTが同じであるとしても、Hマップを用いて算出するトルクレシオRdtの方がPマップを用いて算出するトルクレシオRdtよりも大きくなるように設定されている。これらにより、本実施の形態に係るダンパー補償電流算出部23によれば、Hマップを用いて算出するダンパー補償電流Idの方がPマップを用いて算出するダンパー補償電流Idよりも大きくなる。
そして、本実施の形態に係る目標電流決定部25は、ステアリングホイール101の操舵方向が切り増し方向であるときには、ベース電流Ibに、イナーシャ補償電流Isを加算するとともにダンパー補償電流Idを減算して得た電流を目標電流Itとして決定する。
それゆえ、本実施の形態に係る目標電流算出部20によれば、ステアリングホイール101の操舵方向が切り増し方向であるときには、各種Hマップを用いて算出された値に基づいて決定された目標電流Itの方が各種Pマップを用いて算出された値に基づいて決定された目標電流Itよりも小さくなる。その結果、ステアリングホイール101の操舵方向が切り増し方向であるときの電動モータ110によるアシストトルクは、Hマップを用いて算出された場合の方がPマップを用いて算出された場合よりも小さくなる。
それゆえ、本実施の形態に係る目標電流算出部20によれば、ステアリングホイール101の操舵方向が切り増し方向であるときには、各種Hマップを用いて算出された値に基づいて決定された目標電流Itの方が各種Pマップを用いて算出された値に基づいて決定された目標電流Itよりも小さくなる。その結果、ステアリングホイール101の操舵方向が切り増し方向であるときの電動モータ110によるアシストトルクは、Hマップを用いて算出された場合の方がPマップを用いて算出された場合よりも小さくなる。
したがって、運転者がステアリングホイール101を同じように切り増したとしても、一般道路を走行しているときよりも高速道路を走行しているときの方が、直進安定性が増す。他方、高速道路を走行しているときよりも一般道路を走行しているときの方が操舵力は低くてもよいため操作性が向上する。
このように、本実施の形態に係る目標電流算出部20によれば、制御マップとして、自動車が走行すると予測される複数の種類の道路のそれぞれに対応する複数の制御マップを備え、走行する道路の種類に応じたアシスト力とすることができる。これにより、道路の種類に応じたきめ細かいアシスト力を実現することができる。
このように、本実施の形態に係る目標電流算出部20によれば、制御マップとして、自動車が走行すると予測される複数の種類の道路のそれぞれに対応する複数の制御マップを備え、走行する道路の種類に応じたアシスト力とすることができる。これにより、道路の種類に応じたきめ細かいアシスト力を実現することができる。
ここで、自動車が高速道路を走行していたとしても、高速道路のサービスエリアやパーキングエリアを走行している場合も考えられる。サービスエリアやパーキングエリアでは、本線よりもカーブが多く、その曲率半径も小さい。それゆえ、目標電流算出部20は、自動車がサービスエリアやパーキングエリアを走行していることを把握した場合には、Pマップを用いて算出した値に基づいて目標電流Itを決定するとよい。あるいは、自動車が高速道路を走行しているとしても、車速Vcが所定速度(例えば50km/h)以下の場合はPマップを用いて算出した値に基づいて目標電流Itを決定するとよい。
次に、フローチャートを用いて、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23が行う、算出処理の手順について説明する。以下では、代表してベース電流算出部21がベース電流Ibを算出する算出処理を例示して説明するが、イナーシャ補償電流算出部22およびダンパー補償電流算出部23も同じようにして算出する。
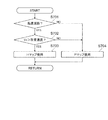
図7は、ベース電流算出部21が行う算出処理の手順を示すフローチャートである。ベース電流算出部21は、この算出処理を予め定めた期間毎に繰り返し実行する。
図7は、ベース電流算出部21が行う算出処理の手順を示すフローチャートである。ベース電流算出部21は、この算出処理を予め定めた期間毎に繰り返し実行する。
先ず、ベース電流算出部21は、自動車が高速道路を走行しているか否かを判断する(S701)。これは、ナビゲーションシステム190から出力されたナビ信号nに基づいて判断する処理である。そして、自動車が高速道路を走行している場合(S701でYES)、車速Vcが上述した所定速度よりも大きいか否かを判断する(S702)。そして、車速Vcが所定速度よりも大きい場合(S702でYES)、Hマップを用いてベース電流Ibを算出する(S703)。他方、自動車が高速道路を走行していない場合(S701でNO)、車速Vcが所定速度以下である場合(S702でNO)、Pマップを用いてベース電流Ibを算出する(S704)。
なお、上述した実施の形態に係る目標電流算出部20においては、ナビゲーションシステムから出力されたナビ信号nに基づいて、自動車が走行している道路を把握しているが特にかかる態様に限定されない。例えば、自動車が、高速道路の料金所に設けられた通信装置と通信するためのETC(Electronic Toll Collection System)装置を搭載している場合には、CANを介してこのETC装置からの出力信号を取得することにより、自動車が高速道路を走行しているのか一般道路を走行しているのかを把握してもよい。ETC装置からの出力信号に基づいて自動車が高速道路を走行していること把握する場合には、車速Vcが所定速度(例えば50km/h)以下の場合は自動車が高速道路を走行しているとしてもPマップを用いて算出した値に基づいて目標電流Itを決定するようにすればよい。
また、上述した実施の形態においては、制御マップとして、一般道路用の制御マップ以外に高速道路用の制御マップを例示したが特にかかる態様に限定されない。例えば、一般道路(アスファルト)よりも摩擦係数が小さい雪道用の制御マップや一般道路(アスファルト)よりも摩擦係数が大きい砂地用の制御マップなどを備えていてもよい。
また、上述した実施の形態においては、目標電流算出部20のベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23が道路の種類に応じた複数の制御マップを有する点について述べたが特にかかる態様に限定されない。例えば、目標電流算出部20の目標電流決定部25を以下の構成にし、ベース電流算出部21、イナーシャ補償電流算出部22およびダンパー補償電流算出部23は複数の制御マップを有しないようにしてもよい。すなわち、目標電流決定部25が、道路の種類とレシオとの対応を示す制御マップを複数有し、ステアリングホイール101の操舵方向が切り増し方向であるときには、ベース電流Ibにイナーシャ補償電流Isを加算するとともにダンパー補償電流Idを減算することにより得られた仮の目標電流Itaに、道路の種類に応じて選択した制御マップに基づいて導き出したレシオRを乗算することにより目標電流Itを算出する(It=Ita×R)。かかる構成である場合も道路の種類に応じた目標電流Itを設定することが可能となる。
10…制御装置、20…目標電流算出部、21…ベース電流算出部、22…イナーシャ補償電流算出部、23…ダンパー補償電流算出部、25…目標電流決定部、30…制御部、100…電動パワーステアリング装置、110…電動モータ
Claims (6)
- 車両に設けられたステアリングホイールの操作に対するアシスト力を付与する電動モータと、
前記電動モータに供給する目標電流を設定する目標電流設定手段と、
を備え、
前記目標電流設定手段は、前記電動モータに供給する目標電流を設定するための制御マップを、前記車両が走行すると予測される複数の種類の道路のそれぞれに対応するように複数有する
ことを特徴とする電動パワーステアリング装置。 - 前記目標電流設定手段は、前記車両が走行している道路の種類を把握し、複数有する前記制御マップの中から把握した道路の種類に対応する制御マップを選択して用いて定めた値に基づいて前記目標電流を設定することを特徴とする請求項1に記載の電動パワーステアリング装置。
- 前記目標電流設定手段は、高速道路に対応する制御マップと一般道路に対応する制御マップとを有し、前記車両が走行する道路が高速道路である場合には当該高速道路に対応する制御マップを用いて定めた値に基づいて前記目標電流を設定し、当該車両が走行する道路が一般道路である場合には当該一般道路に対応する制御マップを用いて定めた値に基づいて当該目標電流を設定することを特徴とする請求項2に記載の電動パワーステアリング装置。
- 前記目標電流設定手段は、前記車両が走行する道路が高速道路であるとしても当該車両の移動速度が所定速度以下である場合には前記一般道路に対応する制御マップを用いて定めた値に基づいて当該目標電流を設定することを特徴とする請求項3に記載の電動パワーステアリング装置。
- 前記ステアリングホイールの操舵方向が切り増し方向である場合、当該ステアリングホイールの操舵トルクおよび前記車両の移動速度が同じだとしても、前記高速道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流は、前記一般道路に対応する制御マップを用いて定めた値に基づいて設定された目標電流よりも小さいことを特徴とする請求項3または4に記載の電動パワーステアリング装置。
- 前記目標電流設定手段は、前記車両に搭載されたナビゲーションシステムあるいはETC装置からの出力信号に基づいて当該車両が走行している道路の種類を把握することを特徴とする請求項1から5のいずれか1項に記載の電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012262647A JP2014108662A (ja) | 2012-11-30 | 2012-11-30 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012262647A JP2014108662A (ja) | 2012-11-30 | 2012-11-30 | 電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014108662A true JP2014108662A (ja) | 2014-06-12 |
Family
ID=51029560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012262647A Pending JP2014108662A (ja) | 2012-11-30 | 2012-11-30 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014108662A (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0569848A (ja) * | 1991-09-11 | 1993-03-23 | Toyota Motor Corp | 車両運動制御装置 |
| JP2005162166A (ja) * | 2003-12-05 | 2005-06-23 | Matsushita Electric Ind Co Ltd | 自動車 |
| JP2007276708A (ja) * | 2006-04-10 | 2007-10-25 | Omron Corp | 感性識別装置、アシスト力制御装置、アシスト力設定装置、感性識別方法、アシスト力制御方法、アシスト力設定方法、感性識別プログラム、アシスト力制御プログラム、アシスト力設定プログラム、および記録媒体 |
| WO2011048772A1 (ja) * | 2009-10-20 | 2011-04-28 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
-
2012
- 2012-11-30 JP JP2012262647A patent/JP2014108662A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0569848A (ja) * | 1991-09-11 | 1993-03-23 | Toyota Motor Corp | 車両運動制御装置 |
| JP2005162166A (ja) * | 2003-12-05 | 2005-06-23 | Matsushita Electric Ind Co Ltd | 自動車 |
| JP2007276708A (ja) * | 2006-04-10 | 2007-10-25 | Omron Corp | 感性識別装置、アシスト力制御装置、アシスト力設定装置、感性識別方法、アシスト力制御方法、アシスト力設定方法、感性識別プログラム、アシスト力制御プログラム、アシスト力設定プログラム、および記録媒体 |
| WO2011048772A1 (ja) * | 2009-10-20 | 2011-04-28 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3756976B1 (en) | Motor control apparatus including steering angle calculation apparatus | |
| CN104015799A (zh) | 电动转向设备 | |
| JP5687166B2 (ja) | 電動パワーステアリング装置 | |
| JP6609465B2 (ja) | 電動パワーステアリング装置 | |
| JP6291314B2 (ja) | 電動パワーステアリング装置、プログラム | |
| JP2014101086A (ja) | 電動パワーステアリング装置 | |
| JP6059063B2 (ja) | 電動パワーステアリング装置 | |
| JP3666778B2 (ja) | 電動パワーステアリング装置 | |
| JP2014108662A (ja) | 電動パワーステアリング装置 | |
| JP6222895B2 (ja) | 電動パワーステアリング装置 | |
| JP2009047542A (ja) | トルク検出装置および操舵装置 | |
| JP2017043114A (ja) | 電動パワーステアリング装置 | |
| JP2014125036A (ja) | 電動パワーステアリング装置 | |
| JP2013226852A (ja) | 電動パワーステアリング装置 | |
| JP2012218617A (ja) | 車両用操舵装置 | |
| JP5265413B2 (ja) | 電動パワーステアリング装置 | |
| JP2005193779A (ja) | 車両用操舵装置 | |
| JP2014125129A (ja) | 電動パワーステアリング装置 | |
| JP6235940B2 (ja) | 電動パワーステアリング装置、電動パワーステアリング装置用の制御装置およびプログラム | |
| JP2014088138A (ja) | 電動パワーステアリング装置 | |
| JP6291310B2 (ja) | 電動パワーステアリング装置、プログラム | |
| JP2014148244A (ja) | 電動パワーステアリング装置 | |
| JP5875931B2 (ja) | 電動パワーステアリング装置 | |
| JP6058984B2 (ja) | 電動パワーステアリング装置 | |
| JP2015189261A (ja) | 電動パワーステアリング装置、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150723 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160524 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20161122 |