JP2014113902A - ハイブリッド車両のモード切り替え制御装置 - Google Patents
ハイブリッド車両のモード切り替え制御装置 Download PDFInfo
- Publication number
- JP2014113902A JP2014113902A JP2012268994A JP2012268994A JP2014113902A JP 2014113902 A JP2014113902 A JP 2014113902A JP 2012268994 A JP2012268994 A JP 2012268994A JP 2012268994 A JP2012268994 A JP 2012268994A JP 2014113902 A JP2014113902 A JP 2014113902A
- Authority
- JP
- Japan
- Prior art keywords
- mode switching
- switching control
- clutch
- control device
- hybrid vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】ハイブリッド走行回生から、クラッチの解放による電気走行回生への移行に際し、無段変速機を強制ダウンシフトさせて、その後の再加速をロー側変速比で開始させる。
【解決手段】クラッチCLを締結したハイブリッドHEV走行中、t0にコースティング走行に移行すると、エンジンをフューエルカットする。t1に制動を行うと、回生制動条件が揃いHEV回生が開始される。HEV回生は、t1からのブレーキスイッチON時間であるHEV回生時間が、設定時間ΔTsに達するt2までの間はHEV回生を継続し、t2時にクラッチCLを解放すると共に、エンジンをフューエルリカバー禁止で停止させて、HEV走行から電気走行(EV走行)へのモード切り替えを行う。ΔTs中に無段変速機を要求減速度Gaに応じた速度で強制ダウンシフトさせ、t2時に通常変速時よりもΔi1,Δi2,Δi3だけロー側の変速比となす。
【選択図】図6
【解決手段】クラッチCLを締結したハイブリッドHEV走行中、t0にコースティング走行に移行すると、エンジンをフューエルカットする。t1に制動を行うと、回生制動条件が揃いHEV回生が開始される。HEV回生は、t1からのブレーキスイッチON時間であるHEV回生時間が、設定時間ΔTsに達するt2までの間はHEV回生を継続し、t2時にクラッチCLを解放すると共に、エンジンをフューエルリカバー禁止で停止させて、HEV走行から電気走行(EV走行)へのモード切り替えを行う。ΔTs中に無段変速機を要求減速度Gaに応じた速度で強制ダウンシフトさせ、t2時に通常変速時よりもΔi1,Δi2,Δi3だけロー側の変速比となす。
【選択図】図6
Description
本発明は、エンジンおよび電動モータを動力源として搭載され、電動モータのみにより走行する電気走行モード(EVモード)と、電動モータおよびエンジンにより走行するハイブリッド走行モード(HEVモード)とを選択可能なハイブリッド車両のモード切り替え制御装置に関するものである。
このようなハイブリッド車両としては従来、例えば特許文献1に記載のようなものが知られている。
このハイブリッド車両は、一方の動力源であるエンジンが無段変速機およびクラッチを順次介して車輪に切り離し可能に駆動結合され、他方の動力源である電動モータが当該車輪に常時結合された型式のものである。
このハイブリッド車両は、一方の動力源であるエンジンが無段変速機およびクラッチを順次介して車輪に切り離し可能に駆動結合され、他方の動力源である電動モータが当該車輪に常時結合された型式のものである。
かかるハイブリッド車両は、エンジンを停止すると共に上記のクラッチを解放することで電動モータのみによるEVモードでの電気走行(EV走行)が可能であり、エンジンを始動させると共に当該クラッチを締結することにより電動モータおよびエンジンによるHEVモードでのハイブリッド走行(HEV走行)が可能である。
なお、EV走行中にクラッチを上記のごとく解放することで、停止状態のエンジンが(変速機が存在している場合は変速機も)車輪から切り離されていることとなり、当該エンジン(変速機)をEV走行中に連れ回す(引き摺る)ことがなく、その分のエネルギー損失を回避し得てエネルギー効率を高めることができる。
上記ハイブリッド車両にあっては、HEV走行中にアクセルペダルを釈放してコースティング(惰性)走行へ移行した場合、エンジンを停止すると共にクラッチを解放してHEV走行モードからEV走行モードに切り替わり、EV走行中にアクセルペダルを踏み込む再加速操作(発進を含む)が行われた場合、エンジンを再始動すると共にクラッチを締結してEV走行モードからHEV走行モードに切り替わる。
ところで上記の発進を含む再加速時は、大きな車輪駆動力(トルク)が必要であることから、無段変速機が変速比をできるだけロー側変速比にされている必要がある。
しかし特許文献1所載のハイブリッド車両は、エンジンを停止すると共にクラッチを解放させて行うHEV→EVモード切り替え時における無段変速機の変速制御について何ら考慮しておらず、無段変速機の変速はハードウエアの成り行きに任せて行われると考えるのが妥当である。
しかし特許文献1所載のハイブリッド車両は、エンジンを停止すると共にクラッチを解放させて行うHEV→EVモード切り替え時における無段変速機の変速制御について何ら考慮しておらず、無段変速機の変速はハードウエアの成り行きに任せて行われると考えるのが妥当である。
ここで、HEV→EVモード切り替え時における無段変速機の成り行き変速について考察する。
当該モード切り替えはエンジンを停止すると共にクラッチを解放させることによって遂行するため、そして自動変速機の変速制御がクラッチの締結制御と共に、エンジン駆動されるポンプからの作動油を媒体として行われることから、HEV→EVモード切り替え時に無段変速機は変速不能となり、当該モード切り替え時の変速比のままにされる。
当該モード切り替えはエンジンを停止すると共にクラッチを解放させることによって遂行するため、そして自動変速機の変速制御がクラッチの締結制御と共に、エンジン駆動されるポンプからの作動油を媒体として行われることから、HEV→EVモード切り替え時に無段変速機は変速不能となり、当該モード切り替え時の変速比のままにされる。
よって従来のハイブリッド車両は、HEV→EVモード切り替え後の発進を含む再加速時に無段変速機がロー側変速比選択状態であることがほとんどなく、ハイ側変速比での再加速を余儀なくされて、駆動力不足により再加速(再発進)性能が悪くなるという問題を生ずる虞があった。
ところで上記したハイブリッド車両にあっては、HEV→EVモード切り替え要求(例えばブレーキ操作)が頻繁に発生したり消失するような状況下で、クラッチの繰り返し締結(エンジンの繰り返し始動)によりエンジンスタータモータの耐久性が低下されるのを防止しつつ、EV回生によるエネルギー効率を高めるなどのため、
HEV→EVモード切り替え要求(ブレーキ操作)が発生したことのみをもって、つまりHEV→EVモード切り替えに際し必要なクラッチの解放を許可すべき運転状態(ブレーキ操作状態)になったことのみをもって当該クラッチの解放を行うのではなく、この運転状態が設定時間に亘って継続した時にはじめて当該HEV→EVモード切り替え用のクラッチ解放(エンジン停止)を実行させるように成すのがよい。
HEV→EVモード切り替え要求(ブレーキ操作)が発生したことのみをもって、つまりHEV→EVモード切り替えに際し必要なクラッチの解放を許可すべき運転状態(ブレーキ操作状態)になったことのみをもって当該クラッチの解放を行うのではなく、この運転状態が設定時間に亘って継続した時にはじめて当該HEV→EVモード切り替え用のクラッチ解放(エンジン停止)を実行させるように成すのがよい。
本発明は、この場合上記の設定時間中クラッチが未だ締結されていて(エンジンが運転されていて)、無段変速機の変速制御が可能であるとの観点から、この設定時間中に無段変速機を強制的にダウンシフトさせることにより、ハイ側変速比での再加速(再発進)を回避して、駆動力不足による再加速(再発進)性能の悪化を防止し得るようにしたハイブリッド車両の(HEV→EV)モード切り替え制御装置を提案することを目的とする。
この目的のため、本発明によるハイブリッド車両のモード切り替え制御装置は、これを以下のごとくに構成する。
先ず本発明の前提となるハイブリッド車両を説明するに、これは、
動力源としてエンジンのほかに電動モータを具え、前記エンジンが、該エンジンにより駆動されるポンプからの流体を媒体としてそれぞれ制御される無段変速機およびクラッチを順次介して車輪に切り離し可能に駆動結合され、該クラッチを解放すると共に前記エンジンを停止させることにより前記電動モータのみにより走行される電気走行モードを選択可能であるほか、前記エンジンを始動させると共に前記クラッチを締結することにより前記電動モータおよびエンジンにより走行されるハイブリッド走行モードを選択可能な車両である。
動力源としてエンジンのほかに電動モータを具え、前記エンジンが、該エンジンにより駆動されるポンプからの流体を媒体としてそれぞれ制御される無段変速機およびクラッチを順次介して車輪に切り離し可能に駆動結合され、該クラッチを解放すると共に前記エンジンを停止させることにより前記電動モータのみにより走行される電気走行モードを選択可能であるほか、前記エンジンを始動させると共に前記クラッチを締結することにより前記電動モータおよびエンジンにより走行されるハイブリッド走行モードを選択可能な車両である。
本発明のモード切り替え制御装置は、かかる車両に対し、以下のごときクラッチ解放許可判定手段と、モード切り替え手段と、強制ダウンシフト手段とを設けた構成に特徴づけられる。
クラッチ解放許可判定手段は、上記ハイブリッド走行モードで、上記電気走行モードへの切り替えに際して必要な前記クラッチの解放を許可すべきクラッチ解放許可運転になったか否かを判定するものである。
モード切り替え手段は、上記クラッチ解放許可判定手段で上記クラッチ解放許可運転になったと判定された後、該クラッチの解放を許可すべきでないクラッチ解放不許可運転に戻らなかったのを確認した時、上記クラッチの解放を実行して上記ハイブリッド走行モードから電気走行モードへの切り替えを行うものである。
強制ダウンシフト手段は、上記クラッチ解放不許可運転へ戻らなかったのを確認するための時間中に上記無段変速機を強制的にロー側変速比に向けてダウンシフトさせるものである。
モード切り替え手段は、上記クラッチ解放許可判定手段で上記クラッチ解放許可運転になったと判定された後、該クラッチの解放を許可すべきでないクラッチ解放不許可運転に戻らなかったのを確認した時、上記クラッチの解放を実行して上記ハイブリッド走行モードから電気走行モードへの切り替えを行うものである。
強制ダウンシフト手段は、上記クラッチ解放不許可運転へ戻らなかったのを確認するための時間中に上記無段変速機を強制的にロー側変速比に向けてダウンシフトさせるものである。
本発明によるハイブリッド車両のモード切り替え制御装置にあっては、
先ずハイブリッド走行モードから電気走行モードへの切り替えに際して必要なクラッチの解放を許可すべきクラッチ解放許可運転になった後、該クラッチの解放を許可すべきでないクラッチ解放不許可運転に戻らなかったのを確認した時、はじめて該クラッチの解放を実行してハイブリッド走行モードから電気走行モードへの切り替えを実行するため、
例えば、ハイブリッド走行モードから電気走行モードへのモード切り替え要求が頻繁に発生したり消失するような状況下でも、クラッチの繰り返し締結(エンジンの繰り返し始動)が起きることがなくて、例えばエンジンスタータモータの耐久性が低下されるのを防止しつつ、電気走行モードでの回生によるエネルギー効率を高めるというような要求を実現することができる。
先ずハイブリッド走行モードから電気走行モードへの切り替えに際して必要なクラッチの解放を許可すべきクラッチ解放許可運転になった後、該クラッチの解放を許可すべきでないクラッチ解放不許可運転に戻らなかったのを確認した時、はじめて該クラッチの解放を実行してハイブリッド走行モードから電気走行モードへの切り替えを実行するため、
例えば、ハイブリッド走行モードから電気走行モードへのモード切り替え要求が頻繁に発生したり消失するような状況下でも、クラッチの繰り返し締結(エンジンの繰り返し始動)が起きることがなくて、例えばエンジンスタータモータの耐久性が低下されるのを防止しつつ、電気走行モードでの回生によるエネルギー効率を高めるというような要求を実現することができる。
更に本発明では、かかる作用効果を達成するために設定されている上記の時間、つまりクラッチ解放不許可運転に戻らなかったのを確認するための時間を有効利用して、この時間中に無段変速機を強制的にロー側変速比に向けて強制的にダウンシフトさせるため、
ハイブリッド走行モードから電気走行モードへのモード切り替え後の発進を含む再加速時に無段変速機がロー側変速比選択状態にされていることとなり、当該発進を含む再加速がロー側変速比選択状態で開始され、駆動力不足により再加速(再発進)性能が悪くなるという前記の問題を解消することができる。
ハイブリッド走行モードから電気走行モードへのモード切り替え後の発進を含む再加速時に無段変速機がロー側変速比選択状態にされていることとなり、当該発進を含む再加速がロー側変速比選択状態で開始され、駆動力不足により再加速(再発進)性能が悪くなるという前記の問題を解消することができる。
以下、本発明の実施の形態を、図面に示す実施例に基づき詳細に説明する。
<第1実施例の構成>
図1は、本発明の第1実施例になるモード切り替え制御装置を具えたハイブリッド車両の駆動系およびその全体制御システムを示す概略系統図である。
<第1実施例の構成>
図1は、本発明の第1実施例になるモード切り替え制御装置を具えたハイブリッド車両の駆動系およびその全体制御システムを示す概略系統図である。
図1のハイブリッド車両は、エンジン1および電動モータ2を動力源として搭載され、エンジン1は、スタータモータ3により始動する。
エンジン1は、Vベルト式無段変速機4を介して駆動車輪5に適宜切り離し可能に駆動結合し、Vベルト式無段変速機4は、概略を以下に説明するようなものとする。
エンジン1は、Vベルト式無段変速機4を介して駆動車輪5に適宜切り離し可能に駆動結合し、Vベルト式無段変速機4は、概略を以下に説明するようなものとする。
Vベルト式無段変速機4は、プライマリプーリ6と、セカンダリプーリ7と、これらプーリ6,7間に掛け渡したVベルト8とからなる無段変速機構CVTを主たる構成要素とする。
プライマリプーリ6はトルクコンバータT/Cを介してエンジン1のクランクシャフトに結合し、セカンダリプーリ7はクラッチCLおよびファイナルギヤ組9を順次介して駆動車輪5に結合する。
プライマリプーリ6はトルクコンバータT/Cを介してエンジン1のクランクシャフトに結合し、セカンダリプーリ7はクラッチCLおよびファイナルギヤ組9を順次介して駆動車輪5に結合する。
かくしてクラッチCLの締結状態で、エンジン1からの動力はトルクコンバータT/Cを経てプライマリプーリ6へ入力され、その後Vベルト8、セカンダリプーリ7、クラッチCLおよびファイナルギヤ組9を順次経て駆動車輪5に達し、ハイブリッド車両の走行に供される。
かかるエンジン動力伝達中、プライマリプーリ6のプーリV溝幅を小さくしつつ、セカンダリプーリ7のプーリV溝幅を大きくすることで、Vベルト8がプライマリプーリ6との巻き掛け円弧径を大きくされると同時にセカンダリプーリ7との巻き掛け円弧径を小さくされ、Vベルト式無段変速機4はハイ側プーリ比(ハイ側変速比)へのアップシフトを行うことができる。
逆にプライマリプーリ6のプーリV溝幅を大きくしつつ、セカンダリプーリ7のプーリV溝幅を小さくすることで、Vベルト8がプライマリプーリ6との巻き掛け円弧径を小さくされると同時にセカンダリプーリ7との巻き掛け円弧径を大きくされ、Vベルト式無段変速機4はロー側プーリ比(ロー側変速比)へのダウンシフトを行うことができる。
逆にプライマリプーリ6のプーリV溝幅を大きくしつつ、セカンダリプーリ7のプーリV溝幅を小さくすることで、Vベルト8がプライマリプーリ6との巻き掛け円弧径を小さくされると同時にセカンダリプーリ7との巻き掛け円弧径を大きくされ、Vベルト式無段変速機4はロー側プーリ比(ロー側変速比)へのダウンシフトを行うことができる。
電動モータ2はファイナルギヤ組11を介して駆動車輪5に常時結合し、この電動モータ2は、バッテリ12の電力によりインバータ13を介して駆動する。
インバータ13は、バッテリ12の直流電力を交流電力に変換して電動モータ2へ供給すると共に、電動モータ2への供給電力を加減することにより、電動モータ2を駆動力制御および回転方向制御する。
インバータ13は、バッテリ12の直流電力を交流電力に変換して電動モータ2へ供給すると共に、電動モータ2への供給電力を加減することにより、電動モータ2を駆動力制御および回転方向制御する。
なお電動モータ2は、上記のモータ駆動のほかに発電機としても機能し、後で詳述する回生制動の用にも供する。
この回生制動時はインバータ13が、電動モータ2に回生制動力分の発電負荷をかけることにより、電動モータ2を発電機として作用させ、電動モータ2の発電電力をバッテリ12に蓄電する。
この回生制動時はインバータ13が、電動モータ2に回生制動力分の発電負荷をかけることにより、電動モータ2を発電機として作用させ、電動モータ2の発電電力をバッテリ12に蓄電する。
図1につき上記した駆動系を具えるハイブリッド車両は、クラッチCLを解放すると共にエンジン1を停止させた状態で、電動モータ2を駆動すると、電動モータ2の動力のみがファイナルギヤ組11を経て駆動車輪5に達し、ハイブリッド車両は電動モータ2のみによる電気走行モード(EVモード)で走行を行うことができる。
この間、クラッチCLを解放していることで、停止状態のエンジン1を連れ回すことがなく、EV走行中の無駄な電力消費を抑制することができる。
この間、クラッチCLを解放していることで、停止状態のエンジン1を連れ回すことがなく、EV走行中の無駄な電力消費を抑制することができる。
上記のEV走行状態においてエンジン1をスタータモータ3により始動させると共にクラッチCLを締結させると、エンジン1からの動力がトルクコンバータT/C、プライマリプーリ6、Vベルト8、セカンダリプーリ7、クラッチCLおよびファイナルギヤ組9を順次経て駆動車輪5に達するようになり、ハイブリッド車両はエンジン1および電動モータ2によるハイブリッド走行モード(HEVモード)で走行を行うことができる。
ハイブリッド車両を上記の走行状態から停車させたり、この停車状態に保つに際しては、駆動車輪5と共に回転するブレーキディスク14をキャリパ15により挟圧して制動することで目的を達する。
キャリパ15は、運転者が踏み込むブレーキペダル16の踏力に応動して負圧式ブレーキブースタ17による倍力下でブレーキペダル踏力対応のブレーキ液圧を出力するマスターシリンダ18に接続し、このブレーキ液圧でキャリパ15を作動させてブレーキディスク14の制動を行う。
キャリパ15は、運転者が踏み込むブレーキペダル16の踏力に応動して負圧式ブレーキブースタ17による倍力下でブレーキペダル踏力対応のブレーキ液圧を出力するマスターシリンダ18に接続し、このブレーキ液圧でキャリパ15を作動させてブレーキディスク14の制動を行う。
ハイブリッド車両はEVモードおよびHEVモードのいずれにおいても、運転者がアクセルペダル19を踏み込んで指令する駆動力指令に応じたトルクで車輪5を駆動され、運転者の要求に応じた駆動力をもって走行される。
ハイブリッド車両の走行モード選択と、エンジン1の出力制御と、電動モータ2の回転方向制御および出力制御と、無段変速機4の変速制御およびクラッチCLの締結、解放制御と、バッテリ12の充放電制御はそれぞれ、ハイブリッドコントローラ21が、対応するエンジンコントローラ22、モータコントローラ23、変速機コントローラ24、およびバッテリコントローラ25を介してこれら制御を行うものとする。
そのためハイブリッドコントローラ21には、ブレーキペダル16を踏み込む制動時にOFFからONに切り替わる常開スイッチであるブレーキスイッチ26からの信号と、アクセルペダル踏み込み量(アクセル開度)APOを検出するアクセル開度センサ27からの信号とを入力する。
ハイブリッドコントローラ21は更に、エンジンコントローラ22、モータコントローラ23、変速機コントローラ24、およびバッテリコントローラ25との間で、内部情報のやり取りを行う。
ハイブリッドコントローラ21は更に、エンジンコントローラ22、モータコントローラ23、変速機コントローラ24、およびバッテリコントローラ25との間で、内部情報のやり取りを行う。
エンジンコントローラ22は、ハイブリッドコントローラ21からの指令に応答して、エンジン1を出力制御し、
モータコントローラ23は、ハイブリッドコントローラ21からの指令に応答してインバータ13を介し電動モータ2の回転方向制御および出力制御を行う。
モータコントローラ23は、ハイブリッドコントローラ21からの指令に応答してインバータ13を介し電動モータ2の回転方向制御および出力制御を行う。
変速機コントローラ24は、ハイブリッドコントローラ21からの指令に応答し、エンジン駆動されるオイルポンプO/Pからのオイルを媒体として、無段変速機4(Vベルト式無段変速機構CVT)の変速制御およびクラッチCLの締結、解放制御を行う。
バッテリコントローラ25は、ハイブリッドコントローラ21からの指令に応答し、バッテリ12の充放電制御を行う。
バッテリコントローラ25は、ハイブリッドコントローラ21からの指令に応答し、バッテリ12の充放電制御を行う。
なお図1では、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合するため、無段変速機4に専用のクラッチCLを設けたが、
図2(a)に例示するごとく無段変速機4が、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間に副変速機31を内蔵している場合は、副変速機31の変速を司る摩擦要素(クラッチや、ブレーキなど)を流用して、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合することができる。
この場合、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合する専用のクラッチを追設する必要がなくてコスト上有利である。
図2(a)に例示するごとく無段変速機4が、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間に副変速機31を内蔵している場合は、副変速機31の変速を司る摩擦要素(クラッチや、ブレーキなど)を流用して、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合することができる。
この場合、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合する専用のクラッチを追設する必要がなくてコスト上有利である。
図2(a)の副変速機31は、複合サンギヤ31s-1および31s-2と、インナピニオン31pinと、アウタピニオン31poutと、リングギヤ31rと、ピニオン31pin, 31poutを回転自在に支持したキャリア31cとからなるラビニョオ型プラネタリギヤセットで構成する。
複合サンギヤ31s-1および31s-2のうち、サンギヤ31s-1は入力回転メンバとして作用するようセカンダリプーリ7に結合し、サンギヤ31s-2はセカンダリプーリ7に対し同軸に配置するが自由に回転し得るようにする。
複合サンギヤ31s-1および31s-2のうち、サンギヤ31s-1は入力回転メンバとして作用するようセカンダリプーリ7に結合し、サンギヤ31s-2はセカンダリプーリ7に対し同軸に配置するが自由に回転し得るようにする。
サンギヤ31s-1にインナピニオン31pinを噛合させ、このインナピニオン31pinおよびサンギヤ31s-2をそれぞれアウタピニオン31poutに噛合させる。
アウタピニオン31poutはリングギヤ31rの内周に噛合させ、キャリア31cを出力回転メンバとして作用するようファイナルギヤ組9に結合する。
アウタピニオン31poutはリングギヤ31rの内周に噛合させ、キャリア31cを出力回転メンバとして作用するようファイナルギヤ組9に結合する。
キャリア31cとリングギヤ31rとをハイクラッチH/Cにより適宜結合可能となし、リングギヤ31rをリバースブレーキR/Bにより適宜固定可能となし、サンギヤ31s-2をローブレーキL/Bにより適宜固定可能となす。
副変速機31は、変速摩擦要素であるハイクラッチH/C、リバースブレーキR/BおよびローブレーキL/Bを、図2(b)に○印により示す組み合わせで締結させ、それ以外を図2(b)に×印で示すように解放させることにより前進第1速、第2速、後退の変速段を選択することができる。
ハイクラッチH/C、リバースブレーキR/BおよびローブレーキL/Bを全て解放すると、副変速機31は動力伝達を行わない中立状態であり、
この状態でローブレーキL/Bを締結すると、副変速機31は前進第1速選択(減速)状態となり、
ハイクラッチH/Cを締結すると、副変速機31は前進第2速選択(直結)状態となり、
リバースブレーキR/Bを締結すると、副変速機31は後退選択(逆転)状態となる。
この状態でローブレーキL/Bを締結すると、副変速機31は前進第1速選択(減速)状態となり、
ハイクラッチH/Cを締結すると、副変速機31は前進第2速選択(直結)状態となり、
リバースブレーキR/Bを締結すると、副変速機31は後退選択(逆転)状態となる。
図2(a)の無段変速機4は、全ての変速摩擦要素H/C, R/B, L/Bを解放して副変速機31を中立状態にすることで、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離すことができる。
従って図2(a)の無段変速機4は、副変速機31の変速摩擦要素H/C, R/B, L/Bが図1におけるクラッチCLの用をなし、図1におけるようにクラッチCLを追設することなく、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合することができる。
従って図2(a)の無段変速機4は、副変速機31の変速摩擦要素H/C, R/B, L/Bが図1におけるクラッチCLの用をなし、図1におけるようにクラッチCLを追設することなく、Vベルト式無段変速機構CVT(セカンダリプーリ7)と駆動車輪5との間を切り離し可能に結合することができる。
図2(a)の無段変速機4は、エンジン駆動されるオイルポンプO/Pからのオイルを作動媒体として制御されるもので、
変速機コントローラ24がライン圧ソレノイド35、ロックアップソレノイド36、プライマリプーリ圧ソレノイド37、ローブレーキ圧ソレノイド38、ハイクラッチ圧&リバースブレーキ圧ソレノイド39およびスイッチバルブ41を介し、無段変速機4の当該制御を以下のように行う。
変速機コントローラ24がライン圧ソレノイド35、ロックアップソレノイド36、プライマリプーリ圧ソレノイド37、ローブレーキ圧ソレノイド38、ハイクラッチ圧&リバースブレーキ圧ソレノイド39およびスイッチバルブ41を介し、無段変速機4の当該制御を以下のように行う。
なお変速機コントローラ24には、図1につき前述した信号に加えて、車速VSPを検出する車速センサ32からの信号、および車両加減速度Gを検出する加速度センサ33からの信号を入力する。
ライン圧ソレノイド35は、変速機コントローラ24からの指令に応動し、オイルポンプO/Pからのオイルを車両要求駆動力対応のライン圧PLに調圧し、このライン圧PLを常時セカンダリプーリ7へセカンダリプーリ圧として供給することにより、セカンダリプーリ7がライン圧PLに応じた推力でVベルト8をスリップしないよう挟圧する。
ロックアップソレノイド36は、変速機コントローラ24からのロックアップ指令に応動し、ライン圧PLを適宜トルクコンバータT/Cに向かわせることで、トルクコンバータT/Cを所要に応じて入出力要素間が直結されたロックアップ状態にする。
プライマリプーリ圧ソレノイド37は、変速機コントローラ24からのCVT変速比指令に応動してライン圧PLをプライマリプーリ圧に調圧し、これをプライマリプーリ6へ供給することにより、プライマリプーリ6のV溝幅と、ライン圧PLを供給されているセカンダリプーリ7のV溝幅とを、CVT変速比が変速機コントローラ24からの指令に一致するよう制御して変速機コントローラ24からのCVT変速比指令を実現する。
ローブレーキ圧ソレノイド38は、変速機コントローラ24が副変速機31の第1速選択指令を発しているとき、ライン圧PLをローブレーキ圧としてローブレーキL/Bに供給することによりこれを締結させ、第1速選択指令を実現する。
ハイクラッチ圧&リバースブレーキ圧ソレノイド39は、変速機コントローラ24が副変速機31の第2速選択指令または後退選択指令を発しているとき、ライン圧PLをハイクラッチ圧&リバースブレーキ圧としてスイッチバルブ41に供給する。
第2速選択指令時はスイッチバルブ41が、ソレノイド39からのライン圧PLをハイクラッチ圧としてハイクラッチH/Cに向かわせ、これを締結することで副変速機31の第2速選択指令を実現する。
後退選択指令時はスイッチバルブ41が、ソレノイド39からのライン圧PLをリバースブレーキ圧としてリバースブレーキR/Bに向かわせ、これを締結することで副変速機31の後退選択指令を実現する。
第2速選択指令時はスイッチバルブ41が、ソレノイド39からのライン圧PLをハイクラッチ圧としてハイクラッチH/Cに向かわせ、これを締結することで副変速機31の第2速選択指令を実現する。
後退選択指令時はスイッチバルブ41が、ソレノイド39からのライン圧PLをリバースブレーキ圧としてリバースブレーキR/Bに向かわせ、これを締結することで副変速機31の後退選択指令を実現する。
<モード切り替え制御>
上記ハイブリッド車両のモード切り替え動制御を、車両の駆動系が図1に示すようなものである場合につき以下に説明する。
HEV走行中にアクセルペダル19を釈放してコースティング(惰性)走行へ移行した場合や、その後ブレーキペダル16を踏み込んで車両を制動する場合、電動モータ2による回生制動によって車両の運動エネルギーを電力に変換し、これをバッテリ12に蓄電しておくことでエネルギー効率の向上を図る。
上記ハイブリッド車両のモード切り替え動制御を、車両の駆動系が図1に示すようなものである場合につき以下に説明する。
HEV走行中にアクセルペダル19を釈放してコースティング(惰性)走行へ移行した場合や、その後ブレーキペダル16を踏み込んで車両を制動する場合、電動モータ2による回生制動によって車両の運動エネルギーを電力に変換し、これをバッテリ12に蓄電しておくことでエネルギー効率の向上を図る。
ところでHEV走行のままの回生制動(HEV回生)は、クラッチCLが締結状態であるため、エンジン1の逆駆動力(エンジンブレーキ)分および無段変速機4のフリクション分だけ回生制動エネルギーの低下を招くこととなり、エネルギー回生効率が悪い。
そのため、HEV走行中に回生制動が開始されたら、できるだけクラッチCLの解放によりエンジン1および無段変速機4を駆動車輪5から切り離してEV走行へと移行することでEV回生状態となし、これによりエンジン1および無段変速機4の連れ回しをなくすことで、その分だけエネルギー回生量を稼げるようにするのが、エネルギー効率を高めるために必要である。
そのため、HEV走行中に回生制動が開始されたら、できるだけクラッチCLの解放によりエンジン1および無段変速機4を駆動車輪5から切り離してEV走行へと移行することでEV回生状態となし、これによりエンジン1および無段変速機4の連れ回しをなくすことで、その分だけエネルギー回生量を稼げるようにするのが、エネルギー効率を高めるために必要である。
一方、上記のようにクラッチCLを解放している時は燃費の観点からエンジン1を無用な運転が行われないよう停止させておくため、上記のコースティング走行中に実行されていたエンジン1への燃料噴射の中止(フューエルカット)がクラッチCLの上記解放時も継続されるよう、エンジン1への燃料噴射の再開(フューエルリカバー)を禁止することで、クラッチCLの解放時にエンジン1を停止させる。
しかし、かようにエンジン1を停止させた場合は、アクセルペダル19を踏み込む再加速時に要求駆動力を電動モータ2のみにより賄い得ず、駆動力不足状態になることから、エンジン1をスタータモータ3により再始動させると共に、クラッチCLを締結させてEV走行からHEV走行へ切り替えることになる。
従って、エネルギー回生効率を高めるためHEV回生の開始時にできるだけクラッチを解放して、エンジン1および無段変速機4を駆動車輪5から切り離すと共にエンジン1を停止させるよう構成すると、
アクセルペダル19を頻繁に釈放したり、再踏み込みする癖のある運転者が運転している場合や、主としてそのような運転を余儀なくされる走行環境下で車両を使用する場合は、必然的にエンジン1の再始動が頻繁に行われることとなり、エンジン始動用スタータモータ3の起動回数が早期に耐久起動回数に達し、スタータモータ保護の観点から不利である。
アクセルペダル19を頻繁に釈放したり、再踏み込みする癖のある運転者が運転している場合や、主としてそのような運転を余儀なくされる走行環境下で車両を使用する場合は、必然的にエンジン1の再始動が頻繁に行われることとなり、エンジン始動用スタータモータ3の起動回数が早期に耐久起動回数に達し、スタータモータ保護の観点から不利である。
かといって、スタータモータ5の保護(耐久性向上)を優先させ、HEV回生制動の開始時から大きく遅れてクラッチCLを解放するのでは、エンジン1および無段変速機4を連れ回すHEV回生の期間が長くなって、エンジン1および無段変速機4の連れ回しエネルギー分だけエネルギー回生効率が悪化するという問題を生ずる。
そこで本実施例においては、上記したごとくトレードオフの関係にある、エネルギー回生効率の向上要求およびスタータモータ3の保護要求を高次元でバランスさせつつ両立させ得るよう、図1に示す駆動系を持ったハイブリッド車両のモード切り替え制御を以下のごとくに行う。
このため図1のハイブリッドコントローラ21は、HEV走行中に図3のモード切り替え制御プログラムを開始する。
また図3の制御プログラムは、電動モータ2による回生制動の許可条件が満足されるとき、例えば電動モータ2の温度が発電を行っても大丈夫な低温域であり、且つ、バッテリ12の温度が充電可能な低温域であり、且つ、バッテリ12が充電余力を残している蓄電状態であるときに実行するのは言うまでもない。
また図3の制御プログラムは、電動モータ2による回生制動の許可条件が満足されるとき、例えば電動モータ2の温度が発電を行っても大丈夫な低温域であり、且つ、バッテリ12の温度が充電可能な低温域であり、且つ、バッテリ12が充電余力を残している蓄電状態であるときに実行するのは言うまでもない。
ステップS11においては、アクセル開度APOからアクセルペダル19が釈放されているコースティング走行か否かをチェックし、ステップS12においては、ブレーキスイッチ26がON(ブレーキペダル16が踏み込まれている制動状態)か否かをチェックする。
本実施例は、アクセルペダル19を釈放し、且つブレーキペダル16を踏み込んだときに回生制動を行うものを前提としており、従って、
ステップS11でアクセルペダル19が釈放状態でないと判定したり、ステップS12でブレーキスイッチ26がONでない(非制動状態)と判定する時は、制御をそのまま終了して図3の制御プログラムから抜ける。
本実施例は、アクセルペダル19を釈放し、且つブレーキペダル16を踏み込んだときに回生制動を行うものを前提としており、従って、
ステップS11でアクセルペダル19が釈放状態でないと判定したり、ステップS12でブレーキスイッチ26がONでない(非制動状態)と判定する時は、制御をそのまま終了して図3の制御プログラムから抜ける。
ちなみに、アクセルペダル19が釈放されているコースティング走行中は、エンジン動力が不要であるからエンジン1への燃料供給を中断(フューエルカット)して、燃費の向上を図るのは通常通りである。
ステップS11でアクセルペダル19が釈放状態であると判定し、且つステップS12でブレーキスイッチ26がON(制動状態)と判定する時、回生制動条件が揃ったことで制御をステップS13に進め、現在のHEV走行のもと運転状態に応じた所定減速度が得られるよう回生制動(HEV回生)を行う。
本実施例はブレーキスイッチ26のON(制動状態)を、HEV回生からクラッチCLの解放により行うEV回生への移行要件とするため、ステップS12が、本発明におけるクラッチ解放許可判定手段に相当する。
本実施例はブレーキスイッチ26のON(制動状態)を、HEV回生からクラッチCLの解放により行うEV回生への移行要件とするため、ステップS12が、本発明におけるクラッチ解放許可判定手段に相当する。
次のステップS14においては、ステップS12でのブレーキスイッチON(制動)判定が設定時間ΔTs以上継続したか否かを、つまりブレーキスイッチON時間ΔT(HEV回生時間)が設定時間ΔTs以上か否かをチェックし、回生制動の開始時から設定時間経過後であるか否かを判定する。
ここで、上記したブレーキスイッチON時間ΔT(HEV回生時間)に係わる設定時間ΔTsについて説明する。
図4は、HEV回生開始時からクラッチCLの解放によるEV回生開始時までのクラッチ解放遅延時間ΔTごとに得られる回生エネルギー(燃費)と、エンジン再始動頻度(スタータモータ3の起動回数)との組み合わせを、回生エネルギー(燃費)の目標達成域およびスタータモータ3の耐久起動回数(スタータモータ保護成立域の限界起動回数)と共に例示するものである。
図4は、HEV回生開始時からクラッチCLの解放によるEV回生開始時までのクラッチ解放遅延時間ΔTごとに得られる回生エネルギー(燃費)と、エンジン再始動頻度(スタータモータ3の起動回数)との組み合わせを、回生エネルギー(燃費)の目標達成域およびスタータモータ3の耐久起動回数(スタータモータ保護成立域の限界起動回数)と共に例示するものである。
図4のデータは、実験などにより予め求めることができ、GOOD領域においては回生エネルギー(燃費)の目標を達成し得ると共に、スタータモータ3の起動回数が保護成立限界起動回数未満であってスタータモータ3の保護も成立させ得る。
しかしそれ以外のNG領域は、回生エネルギー(燃費)の目標を達成し得ないか、或いはスタータモータ3の起動回数が保護成立限界起動回数以上であってスタータモータ3の保護を成立させ得ないため、トレードオフの関係にあるエネルギー回生効率の向上要求およびスタータモータの保護要求を両立させることができない。
しかしそれ以外のNG領域は、回生エネルギー(燃費)の目標を達成し得ないか、或いはスタータモータ3の起動回数が保護成立限界起動回数以上であってスタータモータ3の保護を成立させ得ないため、トレードオフの関係にあるエネルギー回生効率の向上要求およびスタータモータの保護要求を両立させることができない。
この両立を実現するためには、HEV回生開始時からクラッチCLの解放によるEV回生開始時までのクラッチ解放遅延時間ΔTが図4のGOOD領域内における時間、つまりΔT1以上であって、ΔT2未満である必要がある。
そこで本実施例においては、上記したブレーキスイッチON時間ΔT(HEV回生時間)に係わる設定時間ΔTsとして、図4における時間ΔT1を用いる。
そこで本実施例においては、上記したブレーキスイッチON時間ΔT(HEV回生時間)に係わる設定時間ΔTsとして、図4における時間ΔT1を用いる。
ステップS14でブレーキスイッチON時間ΔT(HEV回生時間)が設定時間ΔTs未満であると判定する間は、ステップS20を経て制御をステップS13に戻すことで現在のHEV走行のまま、運転状態に応じた所定減速度が得られるようHEV回生を継続する。
ステップS14でブレーキスイッチON時間ΔT(HEV回生時間)が設定時間ΔTs以上になったと判定する時、制御をステップS15に進めてクラッチCLの解放を許可する。
ステップS14でブレーキスイッチON時間ΔT(HEV回生時間)が設定時間ΔTs以上になったと判定する時、制御をステップS15に進めてクラッチCLの解放を許可する。
次のステップS16においては、前記したごとくフューエルカットされているエンジン1への燃料供給再開(フューエルリカバー)を禁止してフューエルカットを継続させる。
ステップS17においては、締結状態のクラッチCLを介したエンジン1および無段変速機4の引き摺り減速度Gdを、CVTプーリ比(無段変速機4の変速比)i、エンジン回転数Neおよび車速VSPから演算する。
そしてステップS18で、HEV→EVモード切り替え条件の成立下にクラッチCLを解放し、これにより、ステップS16でのフューエルリカバー禁止(フューエルカット継続)と相まってエンジン1を停止させることでEV走行へ移行し、HEV回生からEV回生へと切り替える。
従ってステップS14およびステップS18は、本発明におけるモード切り替え手段に相当する。
そしてステップS18で、HEV→EVモード切り替え条件の成立下にクラッチCLを解放し、これにより、ステップS16でのフューエルリカバー禁止(フューエルカット継続)と相まってエンジン1を停止させることでEV走行へ移行し、HEV回生からEV回生へと切り替える。
従ってステップS14およびステップS18は、本発明におけるモード切り替え手段に相当する。
ところで、当該EV回生への切り替え後もステップS13の回生制動を継続したのでは、ここでの回生制動が、締結状態のクラッチCLを介しエンジン1および無段変速機4を引き摺るHEV走行を前提とした回生制動であるため、エンジン1および無段変速機4の引き摺り減速度分だけ車両減速度が要求に対して不足する。
そのためステップS19において、ステップS17で求めたエンジン1および無段変速機4の引き摺り減速度分Gdを回生制動力に上乗せし、当該上乗せした回生制動力が得られるようなEV回生を行って、EV回生への切り替え後も、現在のEV走行のもと運転状態に応じた所定減速度が得られるようにする。
そのためステップS19において、ステップS17で求めたエンジン1および無段変速機4の引き摺り減速度分Gdを回生制動力に上乗せし、当該上乗せした回生制動力が得られるようなEV回生を行って、EV回生への切り替え後も、現在のEV走行のもと運転状態に応じた所定減速度が得られるようにする。
ところで図1のハイブリッド車両にあっては、HEV走行中にアクセルペダル19を釈放してコースティング走行へ移行し、且つブレーキペダル16の踏み込みにより制動を開始した場合、上記の通りエンジン1を停止すると共にクラッチCLを解放してHEV走行モードからEV走行モードに切り替わり、
当該EV走行中に制動操作をやめてアクセルペダル19を踏み込む再加速操作(発進を含む)が行われた場合、エンジン1を再始動すると共にクラッチCLを締結してEV走行モードからHEV走行モードに切り替わる。
当該EV走行中に制動操作をやめてアクセルペダル19を踏み込む再加速操作(発進を含む)が行われた場合、エンジン1を再始動すると共にクラッチCLを締結してEV走行モードからHEV走行モードに切り替わる。
そして上記の発進を含む再加速時は、大きな車輪駆動力(トルク)が必要であることから、無段変速機4が変速比iをできるだけロー側変速比にされている必要がある。
しかし、エンジン1を停止すると共にクラッチCLを解放させて行うHEV→EVモード切り替え時における無段変速機4の変速をハードウエアの成り行きに任せたのでは、
当該モード切り替え時にエンジン1を停止すると共にクラッチCLを解放させることから、エンジン駆動されるポンプO/Pからの作動油が得られないことによって、無段変速機1は変速不能となり、当該HEV→EVモード切り替え時の変速比のままにされる。
しかし、エンジン1を停止すると共にクラッチCLを解放させて行うHEV→EVモード切り替え時における無段変速機4の変速をハードウエアの成り行きに任せたのでは、
当該モード切り替え時にエンジン1を停止すると共にクラッチCLを解放させることから、エンジン駆動されるポンプO/Pからの作動油が得られないことによって、無段変速機1は変速不能となり、当該HEV→EVモード切り替え時の変速比のままにされる。
この場合ハイブリッド車両は、HEV→EVモード切り替え後の発進を含む再加速時に無段変速機1がロー側変速比選択状態であることがほとんどなく、ハイ側変速比での再加速を余儀なくされて、駆動力不足により再加速(再発進)性能が悪くなるという問題を生ずる虞があった。
本実施例においては、かかるHEV→EVモード切り替え後における再加速(再発進)性能の悪さに関した問題をも解消するため、ステップS14からステップS13への戻りループ中にステップS20を介挿して追加し、このステップS20で無段変速機4を強制的にダウンシフトさせるようにする。
つまり、ステップS14でΔT<ΔTsと判定する間に、つまりステップS12でのブレーキスイッチON(制動)判定(HEV→EVモード切り替え要求判定)が設定時間ΔTs以上に亘って継続したか否かを判定している間に、ステップS20において無段変速機4を強制的にダウンシフトさせる。
なお、ステップS14でΔT<ΔTsと判定する間は未だクラッチCLが締結状態であって、エンジン駆動されるポンプO/Pからのオイルで無段変速機4を変速させることができるため、上記した無段変速機4の強制ダウンシフトは遂行可能である。
従ってステップS20は、本発明における強制ダウンシフト手段に相当する。
つまり、ステップS14でΔT<ΔTsと判定する間に、つまりステップS12でのブレーキスイッチON(制動)判定(HEV→EVモード切り替え要求判定)が設定時間ΔTs以上に亘って継続したか否かを判定している間に、ステップS20において無段変速機4を強制的にダウンシフトさせる。
なお、ステップS14でΔT<ΔTsと判定する間は未だクラッチCLが締結状態であって、エンジン駆動されるポンプO/Pからのオイルで無段変速機4を変速させることができるため、上記した無段変速機4の強制ダウンシフトは遂行可能である。
従ってステップS20は、本発明における強制ダウンシフト手段に相当する。
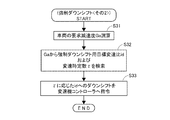
ステップS20における無段変速機4の強制ダウンシフトに際しては、種々の方法を用いることができ、例えば図5の制御プログラムに示すような方法がある。
図5のステップS21においては、ブレーキペダル16の踏み込み状態(ペダル踏力、ペダル踏み込み量、ブレーキ液圧)などから車両の要求減速度Gaを演算し、
ステップS22においては、この要求減速度Gaから制御1回当たりのダウンシフト量Δiおよび強制ダウンシフト用目標変速比idを検索などにより求める。
図5のステップS21においては、ブレーキペダル16の踏み込み状態(ペダル踏力、ペダル踏み込み量、ブレーキ液圧)などから車両の要求減速度Gaを演算し、
ステップS22においては、この要求減速度Gaから制御1回当たりのダウンシフト量Δiおよび強制ダウンシフト用目標変速比idを検索などにより求める。
なお制御1回当たりのダウンシフト量Δiは、要求減速度Gaが高いほど大きなダウンシフト量として、要求減速度Gaが高いほど強制ダウンシフトを高速で行わせるようなものとするが、基本的に強制ダウンシフトの変速速度が、予定の変速パターンに基づく通常のダウンシフトの変速速度よりも高速となるよう、制御1回当たりのダウンシフト量Δiを決定する。
また強制ダウンシフト用目標変速比idは、要求減速度Gaが高いほどロー側変速比として、要求減速度Gaごとに再加速時の要求駆動力を実現可能となるようなものとする。
次のステップS23においては、前回の変速比i(前回値)に制御1回当たりのダウンシフト量Δiを加算して今回の目標変速比iを求め、この目標変速比iを変速機コントローラ24に指令することで、無段変速機4を制御1回当たりのダウンシフト量Δiに応じた速度でダウンシフトさせる。
但し、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idとし、要求減速度Gaごとに再加速時の要求駆動力が実現可能となるようにする。
但し、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idとし、要求減速度Gaごとに再加速時の要求駆動力が実現可能となるようにする。
図3,5のモード切り替え制御を、図6のタイムチャートに基づき以下に詳述する。
クラッチCLを締結したHEV走行中、図6の瞬時t0にアクセルペダル19を釈放してアクセル開度APO=0のコースティング走行に移行すると(ステップS11)、エンジン1への燃料供給を中断(フューエルカット)して燃料噴射量を0にする(図6に示していない)。
クラッチCLを締結したHEV走行中、図6の瞬時t0にアクセルペダル19を釈放してアクセル開度APO=0のコースティング走行に移行すると(ステップS11)、エンジン1への燃料供給を中断(フューエルカット)して燃料噴射量を0にする(図6に示していない)。
瞬時t1に、ブレーキスイッチ26=ONにより示すごとくブレーキペダル16を踏み込んで制動を行うと(ステップS12)、本実施例における回生制動条件が揃ったことでHEV回生が開始される(ステップS13)。
このHEV回生により電動モータ2は、HEV走行中の運転状態に応じた所定減速度が得られるよう回生制動を行うことで、図6の瞬時t1以降における車速VSPの低下(図6では3種類の減速度を例示した)から明らかなように車両を減速させることができ、減速エネルギー分を発電してバッテリに蓄電する。
このHEV回生により電動モータ2は、HEV走行中の運転状態に応じた所定減速度が得られるよう回生制動を行うことで、図6の瞬時t1以降における車速VSPの低下(図6では3種類の減速度を例示した)から明らかなように車両を減速させることができ、減速エネルギー分を発電してバッテリに蓄電する。
瞬時t1からのブレーキスイッチON時間ΔT(HEV回生時間)が所定時間ΔTsに達する(ステップS14)瞬時t2までの間は、上記のHEV回生を継続する。
瞬時t1からのブレーキスイッチON時間ΔT(HEV回生時間)が所定時間ΔTsに達する(ステップS14)瞬時t2に、いままで締結状態だったクラッチCLを解放してエンジン1を、ステップS16でのフューエルリカバー禁止により継続されるフューエルカット(燃料噴射量=0)で停止させる(ステップS16およびステップS18)。
これにより瞬時t2にHEV走行からEV走行へとモードが切り替わり、瞬時t2からEV回生が行われることとなる。
瞬時t1からのブレーキスイッチON時間ΔT(HEV回生時間)が所定時間ΔTsに達する(ステップS14)瞬時t2に、いままで締結状態だったクラッチCLを解放してエンジン1を、ステップS16でのフューエルリカバー禁止により継続されるフューエルカット(燃料噴射量=0)で停止させる(ステップS16およびステップS18)。
これにより瞬時t2にHEV走行からEV走行へとモードが切り替わり、瞬時t2からEV回生が行われることとなる。
一方で本実施例においては、瞬時t1からのブレーキスイッチON時間ΔT(HEV回生時間)が所定時間ΔTsに達する(ステップS14)瞬時t2までの間に、ステップS20において図5の制御プログラムを実行することにより、無段変速機4を図6における変速比iの二点鎖線、一点鎖線、および実線で示す変化から明らかなように強制的にダウンシフトさせる。
変速比iの二点鎖線で示す変化は要求減速度Gaが小さい時のもので、一点鎖線で示す変化は要求減速度Gaがそれよりも大きい時のもので、実線で示す変化は要求減速度Gaが更に大きい時のものである。
変速比iの二点鎖線で示す変化は要求減速度Gaが小さい時のもので、一点鎖線で示す変化は要求減速度Gaがそれよりも大きい時のもので、実線で示す変化は要求減速度Gaが更に大きい時のものである。
なお図6には比較のため、車両減速度がそれぞれ上記3種類の要求減速度Gaと同じである場合における通常変速時の変速比変化を3本の破線で併記した。
これら3本の破線との比較から明らかなように、要求減速度Gaが小さい場合における二点鎖線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi1だけロー側の変速比となり、それよりも要求減速度Gaが大きい場合における一点鎖線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi2だけロー側の変速比となり、それよりも更に要求減速度Gaが大きい場合における実線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi3だけロー側の変速比となる。
これら3本の破線との比較から明らかなように、要求減速度Gaが小さい場合における二点鎖線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi1だけロー側の変速比となり、それよりも要求減速度Gaが大きい場合における一点鎖線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi2だけロー側の変速比となり、それよりも更に要求減速度Gaが大きい場合における実線で示す変速比iは、HEV→EVモード切り替え時t2において通常変速時よりもΔi3だけロー側の変速比となる。
よって、いずれの要求減速度Gaのもとでも、HEV→EVモード切り替え時t2に変速比iが通常変速時よりもロー側の変速比にされることとなり、瞬時t2以降における発進を含む再加速をロー側変速比による大きな駆動力で行うことができ、駆動力不足による再加速(再発進)性能の悪化を生ずることがない。
<第1実施例の効果>
上記した第1実施例の回生制動制御によれば、ブレーキスイッチON時間ΔT(HEV→EVモードへの切り替えに際して必要なクラッチCLの解放を許可する制動状態の継続時間)が所定時間ΔTs以上になった時(ステップS14)、クラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)を許可するため(ステップS15)、
当該クラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)が、HEV回生の開始時(ブレーキスイッチ26のON時)より後であるも、スタータモータの保護に必要な時間内のできるだけ早い所定タイミングで許可されることとなる。
上記した第1実施例の回生制動制御によれば、ブレーキスイッチON時間ΔT(HEV→EVモードへの切り替えに際して必要なクラッチCLの解放を許可する制動状態の継続時間)が所定時間ΔTs以上になった時(ステップS14)、クラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)を許可するため(ステップS15)、
当該クラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)が、HEV回生の開始時(ブレーキスイッチ26のON時)より後であるも、スタータモータの保護に必要な時間内のできるだけ早い所定タイミングで許可されることとなる。
このため、HEV→EVモードへの切り替えに際して必要なクラッチCLの解放を許可する制動の開始のみをもってクラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)が行われることがなく、HEV→EVモード切り替え要求(ブレーキ操作)が頻繁に発生したり、消失するような運転中であっても、エンジン再始動が頻発するのを防止することができる。
よって当該運転によっても、スタータモータ3の起動回数が早期に耐久起動回数に達することがなく、スタータモータ3の耐久性に関した問題を回避することができ、スタータモータ3の保護を図り得る。
よって当該運転によっても、スタータモータ3の起動回数が早期に耐久起動回数に達することがなく、スタータモータ3の耐久性に関した問題を回避することができ、スタータモータ3の保護を図り得る。
また、HEV回生の開始時(ブレーキスイッチ26のON時)よりも後にクラッチCLの解放(HEV回生から、エンジン1の停止を伴うEV回生への切り替え)を許可するといっても、スタータモータ3の保護に必要なできるだけ早い所定タイミングに当該許可を指令するため、
上記クラッチCLの解放(HEV回生→EV回生切り替え)タイミングはHEV回生の開始時から、スタータモータ3の耐久性に関する問題解決のために必要な最小限の時間だけ遅いのみであり、これによるエネルギー回生効率の悪化は僅かで無視できる。
従って本実施例によるハイブリッド車両の回生制動制御装置は、スタータモータ3の保護に関した要求と、エネルギー回生効率に関した要求とを、高次元でバランスさせつつ両立させることができ、いずれかが大きく犠牲になるという問題を生ずることがない。
上記クラッチCLの解放(HEV回生→EV回生切り替え)タイミングはHEV回生の開始時から、スタータモータ3の耐久性に関する問題解決のために必要な最小限の時間だけ遅いのみであり、これによるエネルギー回生効率の悪化は僅かで無視できる。
従って本実施例によるハイブリッド車両の回生制動制御装置は、スタータモータ3の保護に関した要求と、エネルギー回生効率に関した要求とを、高次元でバランスさせつつ両立させることができ、いずれかが大きく犠牲になるという問題を生ずることがない。
更に本実施例においては、上記した作用効果を得るために定めた設定時間ΔTs中、未だクラッチCLが締結されているHEVモードであって、エンジン駆動されるオイルポンプO/Pからの作動油で無段変速機4を変速させることができるとの観点から、
この設定時間ΔTsを有効利用して当該時間中に、無段変速機4を強制的にダウンシフトさせるようにしたため(ステップS20)、
HEVモードからEVモードへのモード切り替え後の発進を含む再加速時に無段変速機4が通常変速によるよりもロー側変速比にされていることとなり、当該発進を含む再加速がロー側変速比で開始されることとなる。
このため、発進を含む再加速がハイ側変速比で開始されることがなく、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
この設定時間ΔTsを有効利用して当該時間中に、無段変速機4を強制的にダウンシフトさせるようにしたため(ステップS20)、
HEVモードからEVモードへのモード切り替え後の発進を含む再加速時に無段変速機4が通常変速によるよりもロー側変速比にされていることとなり、当該発進を含む再加速がロー側変速比で開始されることとなる。
このため、発進を含む再加速がハイ側変速比で開始されることがなく、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
また上記の強制ダウンシフトの変速速度を要求減速度Gaが高いほど速くしたため、車両減速度の如何に関わらず上記の効果を達成し得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう構成したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比を、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idとしたため、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう構成したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比を、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idとしたため、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
<第2実施例のモード切り替え制御>
図7は、本発明の第2実施例になるモード切り替え制御の強制ダウンシフト要領を示す、図5と同様な制御プログラムである。
本実施例も、第1実施例と同様、図1または図2(a)に示す駆動系を持ったハイブリッド車両のモード切り替え制御に係わるが、駆動系が図1のようなものである場合につき説明を展開する。
図7は、本発明の第2実施例になるモード切り替え制御の強制ダウンシフト要領を示す、図5と同様な制御プログラムである。
本実施例も、第1実施例と同様、図1または図2(a)に示す駆動系を持ったハイブリッド車両のモード切り替え制御に係わるが、駆動系が図1のようなものである場合につき説明を展開する。
本実施例においても、モード切り替え制御は図3に示すと同様なものとし、本実施例は、同図におけるステップS20で行うべき無段変速機4の強制ダウンシフトを、図5に代え図7の制御プログラムに沿って、以下のごとくに遂行するものとする。
図7のステップS31においては、ブレーキペダル16の踏み込み状態(ペダル踏力、ペダル踏み込み量、ブレーキ液圧)などから車両の要求減速度Gaを演算し、
ステップS22においては、この要求減速度Gaから強制ダウンシフト用目標変速比idおよび変速時定数τを検索などにより求める。
ステップS22においては、この要求減速度Gaから強制ダウンシフト用目標変速比idおよび変速時定数τを検索などにより求める。
強制ダウンシフト用目標変速比idは、要求減速度Gaが高いほどロー側変速比として、要求減速度Gaごとに再加速時の要求駆動力を実現可能となるようなものとする。
また変速時定数τは、要求減速度Gaが高いほど小さくして、強制ダウンシフトの変速速度が速くなるようにするが、基本的に強制ダウンシフトの変速速度が、予定の変速パターンに基づく通常のダウンシフトの変速速度よりも高速となるよう、変速時定数τを決定する。
また変速時定数τは、要求減速度Gaが高いほど小さくして、強制ダウンシフトの変速速度が速くなるようにするが、基本的に強制ダウンシフトの変速速度が、予定の変速パターンに基づく通常のダウンシフトの変速速度よりも高速となるよう、変速時定数τを決定する。
次のステップS33においては、現在の変速比から強制ダウンシフト用目標変速比idへ変速時定数τに応じた速度で変速させるための目標変速比iを求め、この目標変速比iを変速機コントローラ24に指令することで、無段変速機4を変速時定数τに応じた速度で強制ダウンシフト用目標変速比idへと強制的にダウンシフトさせる。
なお、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idであり、要求減速度Gaごとに再加速時の要求駆動力が実現可能である。
なお、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idであり、要求減速度Gaごとに再加速時の要求駆動力が実現可能である。
<第2実施例の効果>
本実施例による図3,7のモード切り替え制御も、図6のタイムチャートにつき前述したと同様に行われ、第1実施例と同様な作用効果を奏し得て、エネルギー回生効率の向上要求およびスタータモータの保護要求を両立させ得ると共に、この作用効果のために定めた設定時間ΔTs中における無段変速機4の強制ダウンシフトにより、発進を含む再加速がロー側変速比で開始され、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
本実施例による図3,7のモード切り替え制御も、図6のタイムチャートにつき前述したと同様に行われ、第1実施例と同様な作用効果を奏し得て、エネルギー回生効率の向上要求およびスタータモータの保護要求を両立させ得ると共に、この作用効果のために定めた設定時間ΔTs中における無段変速機4の強制ダウンシフトにより、発進を含む再加速がロー側変速比で開始され、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
また上記の強制ダウンシフトの変速速度に係わる変速時定数τを要求減速度Gaが高いほど小さくして、強制ダウンシフト速度を要求減速度Gaが高いほど速くしたため、車両減速度の如何に関わらず上記の効果を達成し得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう変速時定数τを決定したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比が、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idであることから、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう変速時定数τを決定したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比が、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idであることから、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
<第3実施例のモード切り替え制御>
図8は、本発明の第3実施例になるモード切り替え制御の強制ダウンシフト要領を示す、図5と同様な制御プログラムである。
本実施例も、第1実施例と同様、図1または図2(a)に示す駆動系を持ったハイブリッド車両のモード切り替え制御に係わるが、駆動系が図1のようなものである場合につき説明を展開する。
図8は、本発明の第3実施例になるモード切り替え制御の強制ダウンシフト要領を示す、図5と同様な制御プログラムである。
本実施例も、第1実施例と同様、図1または図2(a)に示す駆動系を持ったハイブリッド車両のモード切り替え制御に係わるが、駆動系が図1のようなものである場合につき説明を展開する。
本実施例においても、モード切り替え制御は図3に示すと同様なものとし、本実施例は、同図におけるステップS20で行うべき無段変速機4の強制ダウンシフトを、図5に代え図8の制御プログラムに沿って、以下のごとくに遂行するものとする。
図8のステップS41においては、ブレーキペダル16の踏み込み状態(ペダル踏力、ペダル踏み込み量、ブレーキ液圧)などから車両の要求減速度Gaを演算し、
ステップS42においては、この要求減速度Gaから強制ダウンシフト用目標変速比idおよび変速制御圧の変化率ΔPを検索などにより求める。
ステップS42においては、この要求減速度Gaから強制ダウンシフト用目標変速比idおよび変速制御圧の変化率ΔPを検索などにより求める。
強制ダウンシフト用目標変速比idは、要求減速度Gaが高いほどロー側変速比として、要求減速度Gaごとに再加速時の要求駆動力を実現可能となるようなものとする。
また変速制御圧の変化率ΔPは、要求減速度Gaが高いほど大きくして、強制ダウンシフトの変速速度が速くなるようにするが、基本的に強制ダウンシフトの変速速度が、予定の変速パターンに基づく通常のダウンシフトの変速速度よりも高速となるよう、変速制御圧の変化率ΔPを決定する。
また変速制御圧の変化率ΔPは、要求減速度Gaが高いほど大きくして、強制ダウンシフトの変速速度が速くなるようにするが、基本的に強制ダウンシフトの変速速度が、予定の変速パターンに基づく通常のダウンシフトの変速速度よりも高速となるよう、変速制御圧の変化率ΔPを決定する。
次のステップS43においては、変速制御圧を現在の値から上記変化率ΔPで強制ダウンシフト用目標変速比idに対応した変速制御圧に向かわせるよう変速機コントローラ24に指令することで、無段変速機4を変速制御圧変化率ΔPに応じた速度で強制ダウンシフト用目標変速比idへと強制的にダウンシフトさせる。
なお、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idであり、要求減速度Gaごとに再加速時の要求駆動力が実現可能である。
なお、この強制ダウンシフトによる限界変速比は上記の強制ダウンシフト用目標変速比idであり、要求減速度Gaごとに再加速時の要求駆動力が実現可能である。
<第3実施例の効果>
本実施例による図3,8のモード切り替え制御も、図6のタイムチャートにつき前述したと同様に行われ、第1実施例と同様な作用効果を奏し得て、エネルギー回生効率の向上要求およびスタータモータの保護要求を両立させ得ると共に、この作用効果のために定めた設定時間ΔTs中における無段変速機4の強制ダウンシフトにより、発進を含む再加速がロー側変速比で開始され、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
本実施例による図3,8のモード切り替え制御も、図6のタイムチャートにつき前述したと同様に行われ、第1実施例と同様な作用効果を奏し得て、エネルギー回生効率の向上要求およびスタータモータの保護要求を両立させ得ると共に、この作用効果のために定めた設定時間ΔTs中における無段変速機4の強制ダウンシフトにより、発進を含む再加速がロー側変速比で開始され、駆動力不足により再加速(再発進)性能が悪くなるという問題を解消することができる。
また上記の強制ダウンシフトの変速速度に係わる変速制御圧変化率ΔPを要求減速度Gaが高いほど大きくして、強制ダウンシフト速度を要求減速度Gaが高いほど速くしたため、車両減速度の如何に関わらず上記の効果を達成し得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう変速制御圧変化率ΔPを決定したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比が、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idであることから、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
さらに強制ダウンシフトの変速速度が通常ダウンシフトよりも高速になるよう変速制御圧変化率ΔPを決定したため、上記の効果を確実なものにし得る。
そして強制ダウンシフト時の限界変速比が、要求減速度Gaが高いほど大きく定めたダウンシフト用目標変速比idであることから、要求減速度Gaごとに再加速時の要求駆動力を実現することができ、要求減速度Gaの如何に関わらず上記の効果を確実なものにし得る。
1 エンジン(動力源)
2 電動モータ(動力源)
3 スタータモータ
4 Vベルト式無段変速機
5 駆動車輪
6 プライマリプーリ
7 セカンダリプーリ
8 Vベルト
CVT 無段変速機構
T/C トルクコンバータ
CL クラッチ
9,11 ファイナルギヤ組
12 バッテリ
13 インバータ
14 ブレーキディスク
15 キャリパ
16 ブレーキペダル
17 負圧式ブレーキブースタ
18 マスターシリンダ
19 アクセルペダル
21 ハイブリッドコントローラ
22 エンジンコントローラ
23 モータコントローラ
24 変速機コントローラ
25 バッテリコントローラ
26 ブレーキスイッチ
27 アクセル開度センサ
O/P オイルポンプ
31 副変速機
H/C ハイクラッチ
R/B リバースブレーキ
L/B ローブレーキ
32 車速センサ
33 車両加速度センサ
35 ライン圧ソレノイド
36 ロックアップソレノイド
37 プライマリプーリ圧ソレノイド
38 ローブレーキ圧ソレノイド
39 ハイクラッチ圧&リバースブレーキ圧ソレノイド
41 スイッチバルブ
2 電動モータ(動力源)
3 スタータモータ
4 Vベルト式無段変速機
5 駆動車輪
6 プライマリプーリ
7 セカンダリプーリ
8 Vベルト
CVT 無段変速機構
T/C トルクコンバータ
CL クラッチ
9,11 ファイナルギヤ組
12 バッテリ
13 インバータ
14 ブレーキディスク
15 キャリパ
16 ブレーキペダル
17 負圧式ブレーキブースタ
18 マスターシリンダ
19 アクセルペダル
21 ハイブリッドコントローラ
22 エンジンコントローラ
23 モータコントローラ
24 変速機コントローラ
25 バッテリコントローラ
26 ブレーキスイッチ
27 アクセル開度センサ
O/P オイルポンプ
31 副変速機
H/C ハイクラッチ
R/B リバースブレーキ
L/B ローブレーキ
32 車速センサ
33 車両加速度センサ
35 ライン圧ソレノイド
36 ロックアップソレノイド
37 プライマリプーリ圧ソレノイド
38 ローブレーキ圧ソレノイド
39 ハイクラッチ圧&リバースブレーキ圧ソレノイド
41 スイッチバルブ
Claims (11)
- 動力源としてエンジンのほかに電動モータを具え、前記エンジンが、該エンジンにより駆動されるポンプからの流体を媒体としてそれぞれ制御される無段変速機およびクラッチを順次介して車輪に切り離し可能に駆動結合され、該クラッチを解放すると共に前記エンジンを停止させることにより前記電動モータのみにより走行される電気走行モードを選択可能であるほか、前記エンジンを始動させると共に前記クラッチを締結することにより前記電動モータおよびエンジンにより走行されるハイブリッド走行モードを選択可能なハイブリッド車両のモード切り替え制御装置において、
前記ハイブリッド走行モードで、前記電気走行モードへの切り替えに際して必要な前記クラッチの解放を許可すべきクラッチ解放許可運転になったか否かを判定するクラッチ解放許可判定手段と、
該手段で前記クラッチ解放許可運転になったと判定された後、該クラッチの解放を許可すべきでないクラッチ解放不許可運転に戻らなかったのを確認した時、前記クラッチの解放を実行して前記ハイブリッド走行モードから電気走行モードへの切り替えを行うモード切り替え手段と、
前記クラッチ解放不許可運転へ戻らなかったのを確認するための時間中に前記無段変速機を強制的にロー側変速比に向けてダウンシフトさせる強制ダウンシフト手段を設けたことを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項1に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、前記設定時間中に前記無段変速機の変速パターンに基づく通常ダウンシフトが行われる走行条件である場合、該通常ダウンシフトの変速速度よりも高速で前記強制ダウンシフトを行わせるものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項1または2に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、所定時間ごとに変速比を所定量ずつ増大させて前記強制ダウンシフトを行うものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項3に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、前記所定時間ごとの変速比の所定増大量を車両の要求減速度が高いほど大きくして、車両要求減速度が高いほど前記強制ダウンシフトの変速速度を速くするものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項3または4に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、強制ダウンシフト用の目標変速比を定め、前記強制ダウンシフトの限界変速比を該強制ダウンシフト用目標変速比とするものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項1または2に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、強制ダウンシフト用の目標変速比を定め、該強制ダウンシフト用目標変速比へ所定の時定数で変速させて前記強制ダウンシフトを行うものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項6に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、前記所定の変速時定数を車両の要求減速度が高いほど小さくして、車両要求減速度が高いほど前記強制ダウンシフトの変速速度を速くするものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項1または2に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、強制ダウンシフト用の目標変速比を定め、前記無段変速機の変速制御圧を所定の変化率で該強制ダウンシフト用目標変速比対応の圧力に変化させるものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項8に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、変速制御圧に係わる前記所定の変化率を車両の要求減速度が高いほど大きくして、車両要求減速度が高いほど前記変速制御圧を高速で強制ダウンシフト用目標変速比対応の圧力に向かわせるものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項5〜9のいずれか1項に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記強制ダウンシフト手段は、前記強制ダウンシフト用目標変速比を車両の要求減速度が高いほどロー側変速比として、該車両要求減速度ごとに再加速時の要求駆動力を実現可能にしたものであることを特徴とするハイブリッド車両のモード切り替え制御装置。 - 請求項1〜10のいずれか1項に記載された、ハイブリッド車両のモード切り替え制御装置において、
前記クラッチ解放不許可運転へ戻らなかったのを確認するための時間は、前記エンジンのスタータモータ起動回数が該スタータモータの耐久起動回数未満となるような時間であることを特徴とするハイブリッド車両のモード切り替え制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012268994A JP2014113902A (ja) | 2012-12-10 | 2012-12-10 | ハイブリッド車両のモード切り替え制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012268994A JP2014113902A (ja) | 2012-12-10 | 2012-12-10 | ハイブリッド車両のモード切り替え制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014113902A true JP2014113902A (ja) | 2014-06-26 |
Family
ID=51170400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012268994A Pending JP2014113902A (ja) | 2012-12-10 | 2012-12-10 | ハイブリッド車両のモード切り替え制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014113902A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101588760B1 (ko) * | 2014-10-17 | 2016-01-26 | 현대자동차 주식회사 | 하이브리드 차량의 동력전달장치의 제어 장치 및 방법 |
| EP3109116A1 (en) * | 2015-06-16 | 2016-12-28 | Toyota Jidosha Kabushiki Kaisha | Control system of vehicle |
| KR101704251B1 (ko) * | 2015-08-27 | 2017-02-07 | 현대자동차주식회사 | Hev 차량의 엔진정지 제어시 변속방법 및 변속장치 |
| CN106696718A (zh) * | 2015-11-16 | 2017-05-24 | 福特环球技术公司 | 用于缓解再生制动期间的不良状况的方法和系统 |
-
2012
- 2012-12-10 JP JP2012268994A patent/JP2014113902A/ja active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101588760B1 (ko) * | 2014-10-17 | 2016-01-26 | 현대자동차 주식회사 | 하이브리드 차량의 동력전달장치의 제어 장치 및 방법 |
| US9493154B2 (en) | 2014-10-17 | 2016-11-15 | Hyundai Motor Company | Control apparatus and method of power transmission system for hybrid elecric vehicle |
| EP3109116A1 (en) * | 2015-06-16 | 2016-12-28 | Toyota Jidosha Kabushiki Kaisha | Control system of vehicle |
| RU2646780C2 (ru) * | 2015-06-16 | 2018-03-07 | Тойота Дзидося Кабусики Кайся | Система управления транспортного средства |
| KR101704251B1 (ko) * | 2015-08-27 | 2017-02-07 | 현대자동차주식회사 | Hev 차량의 엔진정지 제어시 변속방법 및 변속장치 |
| CN106696718A (zh) * | 2015-11-16 | 2017-05-24 | 福特环球技术公司 | 用于缓解再生制动期间的不良状况的方法和系统 |
| CN106696718B (zh) * | 2015-11-16 | 2021-10-15 | 福特环球技术公司 | 用于缓解再生制动期间的不良状况的方法和系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5936703B2 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| US9963141B2 (en) | Hybrid vehicle control device with transmission control for a level difference of a road surface | |
| JP5992537B2 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| CN104797475B (zh) | 混合动力车辆的控制装置 | |
| US9758158B2 (en) | Hybrid vehicle control device | |
| JP6052775B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2007261498A (ja) | ハイブリッド車両の伝動状態切り替え制御装置 | |
| WO2012105601A1 (ja) | 電動車両の踏み込みダウンシフト制御装置 | |
| CN105050844A (zh) | 混合动力车辆 | |
| JP2015134508A (ja) | ハイブリッド車両の電気走行減速時変速制御装置 | |
| JP6569095B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6340605B2 (ja) | ハイブリッド車両の制御装置 | |
| JPWO2014065302A1 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP2014113902A (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP6303783B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6113478B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6330190B2 (ja) | ハイブリッド車両の制御装置 | |
| WO2014087819A1 (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP2013241100A (ja) | ハイブリッド車両の制御装置 | |
| WO2014069527A1 (ja) | ハイブリッド車両の回生制動制御装置 | |
| WO2014073435A1 (ja) | ハイブリッド車両の制御装置 | |
| JP2014091438A (ja) | ハイブリッド車両の変速制御装置 | |
| JP2014094595A (ja) | ハイブリッド車両の制御装置 | |
| JP6330189B2 (ja) | ハイブリッド車両の制御装置 |