JP2014118024A - 車線維持支援装置 - Google Patents
車線維持支援装置 Download PDFInfo
- Publication number
- JP2014118024A JP2014118024A JP2012274143A JP2012274143A JP2014118024A JP 2014118024 A JP2014118024 A JP 2014118024A JP 2012274143 A JP2012274143 A JP 2012274143A JP 2012274143 A JP2012274143 A JP 2012274143A JP 2014118024 A JP2014118024 A JP 2014118024A
- Authority
- JP
- Japan
- Prior art keywords
- lane
- torque
- steering
- lane keeping
- keeping assist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
【解決手段】自車両が走行車線から逸脱するのを防止する方向への車線維持用アシストトルクが、運転者が打ち勝てる範囲の大きさで付与される。舵角増大方向への操舵トルクに対して舵角減少方向への操舵トルクが小さくなるようにヒステリシスが設定される。車線維持用アシストトルクが付与されているときは、車線維持用アシストトルクが付与されていないときに比して、上記ヒステリシスの幅が小さくされる。
【選択図】 図2
Description
自車両が走行車線から逸脱するのを防止する方向への車線維持用アシストトルクを、運転者が打ち勝てる範囲の大きさで付与するようにした車線維持支援装置において、
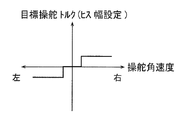
舵角増大方向への操舵トルクに対して舵角減少方向への操舵トルクが小さくなるようにヒステリシスが設定され、
前記車線維持用アシストトルクが付与されているときは、該車線維持用アシストトルクが付与されていないときに比して、前記ヒステリシスの幅が小さくされる、
ようにしてある。上記解決手法により、車線維持用アシストトルクが付与されていない状態から付与している状態へと移行した際に、ステアリングハンドルの戻りが悪化したと運転者に感じさせてしまう事態が防止あるいは抑制されることになる。
物理的操舵トルクと運転者が知覚する知覚操舵トルクの大きさとの相関関係が、物理的操舵トルクが小さいときは大きいときに比して、同じ物理的操舵トルクの変化量であっても前記知覚操舵トルクの変化量が大きくなるように設定された特性として設定され、
前記車線維持用アシストトルクが付与されているときと付与されていないときとの間における前記ヒステリシスの幅の差が、前記特性に照合して前記知覚操舵トルクの変化量がほぼ同一となるように設定される、
ようにしてある(請求項2対応)。この場合、力に関する人間の知覚特性を十分に考慮して、請求項1に対応した効果を十分に発揮させることができる。
前記切替スイッチにより前記制御実行状態が選択されているときは、前記制御禁止状態が選択されているときに比して、前記ヒステリシスの幅が小さくされる、
ようにしてある(請求項3対応)。この場合、切替スイッチにより運転者の好みに応じて車線維持制御の実行と禁止とを選択できるようにしつつ、この切替スイッチの操作に起因した操舵に関する違和感を防止あるいは抑制することができる。
自車両の物理的車線中心位置が前記不感帯外に存在するときは該不感帯内に存在するときに比して、前記ヒステリシスの幅が小さくされる、
ようにしてある(請求項4対応)。この場合、不感帯の設定により不必要に車線維持用アシストトルクを付与する事態を防止しつつ、自車両の物理的車線中心位置が不感帯内にあるか否かを問わず、操舵に関する違和感を防止あるいは抑制することができる。

上記車線維持用アシストトルクTLKAが、車線維持制御なしの場合に対して、追加的に付与されることになる。そして、車線維持用アシストトルクTLKAが付与されるときは、付与されない場合に比して、ヒステリシス幅が減少補正されることになる。
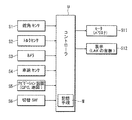
S1:舵角センサ
S2:トルクセンサ
S3:カメラ
S4:車速センサ
S5:ナビゲーション装置
S6:切替スイッチ(車線維持制御のON、OFF用)
S11:モータ(パワーアシスト用)
Claims (4)
- 自車両が走行車線から逸脱するのを防止する方向への車線維持用アシストトルクを、運転者が打ち勝てる範囲の大きさで付与するようにした車線維持支援装置において、
舵角増大方向への操舵トルクに対して舵角減少方向への操舵トルクが小さくなるようにヒステリシスが設定され、
前記車線維持用アシストトルクが付与されているときは、該車線維持用アシストトルクが付与されていないときに比して、前記ヒステリシスの幅が小さくされる、
ことを特徴とする車線維持支援装置。 - 請求項1において、
物理的操舵トルクと運転者が知覚する知覚操舵トルクの大きさとの相関関係が、物理的操舵トルクが小さいときは大きいときに比して、同じ物理的操舵トルクの変化量であっても前記知覚操舵トルクの変化量が大きくなるように設定された特性として設定され、
前記車線維持用アシストトルクが付与されているときと付与されていないときとの間における前記ヒステリシスの幅の差が、前記特性に照合して前記知覚操舵トルクの変化量がほぼ同一となるように設定される、
ことを特徴とする車線維持支援装置。 - 請求項1または請求項2において、
運転者によりマニュアル操作されて、車線維持用アシストトルクを付与する制御実行状態と、車線維持用アシストトルクの付与を禁止する制御禁止状態とを選択する切替スイッチを備え、
前記切替スイッチにより前記制御実行状態が選択されているときは、前記制御禁止状態が選択されているときに比して、前記ヒステリシスの幅が小さくされる、
ことを特徴とする車線維持支援装置。 - 請求項1ないし請求項3のいずれか1項において、
自車両の走行車線における物理的車線中心位置から左右方向に所定幅ずれた範囲が不感帯として設定されて、自車両の物理的車線中心位置が該不感帯内に存在するときは前記車線維持用アシストトルクの付与が行われないようにされ、
自車両の物理的車線中心位置が前記不感帯外に存在するときは該不感帯内に存在するときに比して、前記ヒステリシスの幅が小さくされる、
ことを特徴とする車線維持支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012274143A JP5900309B2 (ja) | 2012-12-15 | 2012-12-15 | 車線維持支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012274143A JP5900309B2 (ja) | 2012-12-15 | 2012-12-15 | 車線維持支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014118024A true JP2014118024A (ja) | 2014-06-30 |
| JP5900309B2 JP5900309B2 (ja) | 2016-04-06 |
Family
ID=51173267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012274143A Expired - Fee Related JP5900309B2 (ja) | 2012-12-15 | 2012-12-15 | 車線維持支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5900309B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016107810A (ja) * | 2014-12-05 | 2016-06-20 | トヨタ自動車株式会社 | パワーステアリング制御装置 |
| JP2017056796A (ja) * | 2015-09-15 | 2017-03-23 | マツダ株式会社 | 車線維持制御装置 |
| US10780882B2 (en) | 2018-09-12 | 2020-09-22 | Subaru Corporation | Lane keeping controller |
| CN116691825A (zh) * | 2022-03-02 | 2023-09-05 | 丰田自动车株式会社 | 控制装置、转向操纵装置、控制方法、存储介质 |
| JP2024024886A (ja) * | 2022-08-10 | 2024-02-26 | トヨタ自動車株式会社 | 車両の制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006335149A (ja) * | 2005-05-31 | 2006-12-14 | Toyota Motor Corp | 操舵支援装置 |
| JP2007038696A (ja) * | 2005-07-29 | 2007-02-15 | Toyota Motor Corp | 操舵支援装置 |
| JP2009056994A (ja) * | 2007-09-03 | 2009-03-19 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| WO2010073373A1 (ja) * | 2008-12-26 | 2010-07-01 | トヨタ自動車株式会社 | パワーステアリング装置 |
-
2012
- 2012-12-15 JP JP2012274143A patent/JP5900309B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006335149A (ja) * | 2005-05-31 | 2006-12-14 | Toyota Motor Corp | 操舵支援装置 |
| JP2007038696A (ja) * | 2005-07-29 | 2007-02-15 | Toyota Motor Corp | 操舵支援装置 |
| JP2009056994A (ja) * | 2007-09-03 | 2009-03-19 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| WO2010073373A1 (ja) * | 2008-12-26 | 2010-07-01 | トヨタ自動車株式会社 | パワーステアリング装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016107810A (ja) * | 2014-12-05 | 2016-06-20 | トヨタ自動車株式会社 | パワーステアリング制御装置 |
| JP2017056796A (ja) * | 2015-09-15 | 2017-03-23 | マツダ株式会社 | 車線維持制御装置 |
| US10780882B2 (en) | 2018-09-12 | 2020-09-22 | Subaru Corporation | Lane keeping controller |
| CN116691825A (zh) * | 2022-03-02 | 2023-09-05 | 丰田自动车株式会社 | 控制装置、转向操纵装置、控制方法、存储介质 |
| JP2023127935A (ja) * | 2022-03-02 | 2023-09-14 | トヨタ自動車株式会社 | 制御装置、操舵装置、制御方法、プログラム |
| JP7616125B2 (ja) | 2022-03-02 | 2025-01-17 | トヨタ自動車株式会社 | 制御装置、操舵装置、制御方法、プログラム |
| JP2024024886A (ja) * | 2022-08-10 | 2024-02-26 | トヨタ自動車株式会社 | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5900309B2 (ja) | 2016-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105980238B (zh) | 车辆转向控制装置 | |
| JP6573643B2 (ja) | 車両の走行制御装置 | |
| JP6652045B2 (ja) | 自動運転車両 | |
| JP4582052B2 (ja) | 走行支援装置 | |
| JP6185482B2 (ja) | 車両の走行制御装置 | |
| JP6011304B2 (ja) | 車線維持支援装置 | |
| JP4995029B2 (ja) | 車両の運転支援装置 | |
| JP5936281B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JP6637553B1 (ja) | 車両制御装置 | |
| JP5561385B2 (ja) | 逸脱抑制装置および逸脱抑制プログラム | |
| JP6952014B2 (ja) | 車両制御装置、車両制御方法、及び車両制御システム | |
| JP6759538B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| JP5561386B2 (ja) | 逸脱抑制装置および逸脱抑制プログラム | |
| JP2018177152A (ja) | 車両の操舵支援装置および操舵支援方法 | |
| JP2006264623A (ja) | 車線維持支援装置 | |
| JP2018012424A (ja) | 車両用運転支援装置 | |
| CA3036762C (en) | Parking assist method and device | |
| JP5900309B2 (ja) | 車線維持支援装置 | |
| JP2017061279A (ja) | 操舵支援制御装置 | |
| JP2022060934A (ja) | 車両の車線逸脱抑制制御装置 | |
| JP2015151048A (ja) | 車両用軌跡制御装置 | |
| JP2016011060A (ja) | 車線維持支援システム | |
| JP6176194B2 (ja) | 車線維持支援システム | |
| JP2016011059A (ja) | 車線維持支援システム | |
| JP6011358B2 (ja) | 車線維持支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150312 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160209 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5900309 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |