JP2014141037A - 記録装置及び記録方法 - Google Patents
記録装置及び記録方法 Download PDFInfo
- Publication number
- JP2014141037A JP2014141037A JP2013011789A JP2013011789A JP2014141037A JP 2014141037 A JP2014141037 A JP 2014141037A JP 2013011789 A JP2013011789 A JP 2013011789A JP 2013011789 A JP2013011789 A JP 2013011789A JP 2014141037 A JP2014141037 A JP 2014141037A
- Authority
- JP
- Japan
- Prior art keywords
- recording
- detection position
- recording medium
- relative movement
- obstacle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Ink Jet (AREA)
- Handling Of Sheets (AREA)
- Accessory Devices And Overall Control Thereof (AREA)
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
Abstract
【解決手段】被記録媒体Pを支持する支持部10と、記録データに基づいて前記支持部10に支持された前記被記録媒体Pに記録する記録機構4と、前記支持部10と前記記録機構4とを相対移動可能な移動機構8と、記録を実行する際に前記被記録媒体Pにおける障害物を前記相対移動方向Aにおいて前記記録機構4に対して検出位置を移動させることなく検出可能であって、前記検出位置を前記記録機構4に対して前記相対移動方向Aに移動可能な検出部19と、を備える。
【選択図】図1
Description
このような障害物に起因する問題を抑制するために、障害物を検出する検出部を記録装置に備えることが考えられる。しかし、その検出部の位置等によっては、例えば、障害物を検出しても被記録媒体の搬送停止が間に合わず、該障害物が記録機構と干渉する場合があった。また、本来なら障害物の影響を受けずに記録を完了可能な場合でも被記録媒体の搬送を停止させてしまい、被記録媒体を無駄にする場合があった。
また、「被記録媒体における障害物」とは、被記録媒体に発生する皺、浮き及び捲れ、並びに、被記録媒体の被記録面上にゴミなどの異物等、記録を実行する際に障害となる前記被記録媒体に生じるすべての事物を意味する。
なお、一旦前記相対移動を停止させた後に続きの部分から記録を再開すると、記録画像にムラが生じやすい。このため、一旦前記相対移動を停止させた後に続きの部分から記録を再開するということは困難であり、被記録媒体を無駄にし易い。本態様によれば、このような被記録媒体の無駄を抑制可能である。
なお、「前記記録機構から前記検出位置までの前記相対移動方向の距離」とは、記録機構のいずれか1つの構成部材から前記検出位置までの最短距離のほか、記録機構の構成部材としての記録ヘッドから前記検出位置までの距離のいずれをも含む意味である。
本態様によれば、前記障害物が発生した場合においても、該障害物を検出するとともに、被記録媒体の無駄を抑制しつつ該障害物が記録機構と干渉することを抑制することが可能になる。
以下に、本発明の実施例に係る記録装置について、添付図面を参照して詳細に説明する。
最初に、本発明の実施例1に係る記録装置について説明する。なお、本実施例の記録装置は、記録機構に対して被記録媒体の支持部であるグルーベルトによって移動させることにより被記録媒体を搬送する構成の記録装置である。ただし、このような構成に限定されず、被記録媒体の支持部に対して記録機構を移動させる構成でもよく、両者を共に移動させる構成でもよい。
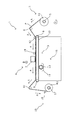
図1は本発明の実施例1に係る記録装置1の概略側面図であり、図2は本発明の実施例1に係る記録装置1の概略平面図である。
そして、該検出位置に光学センサー19が固定された状態で、障害物の検出は行われる。別の表現をすると、記録を実行する際における光学センサー19による障害物の検出は、光学センサー19による障害物の検出位置を搬送方向Aにおいて記録機構4に対して移動させることなく行われる。
一方、制御部20は、画像Iが搬送方向Aに長く、前記長さL1よりも前記距離L2が長くなる範囲に前記検出位置を設定可能でない場合、予め定められた所定の位置に前記検出位置を設定する。
なお、本実施例の記録装置1は、前記距離L2として、記録機構4から前記検出位置までの最短距離を用いているが、記録ヘッド7から前記検出位置までの距離を用いる構成でもよい。
記録の際、記録ヘッド7を往復走査させて記録するが、記録走査中(記録ヘッドの移動中)は、搬送機構3は被記録媒体Pの搬送を停止させる。別の表現をすると、記録の際、記録ヘッド7の往復走査と被記録媒体Pの搬送は交互に行われる。すなわち、記録の際、記録ヘッド7の往復走査に対応して、搬送機構3は被記録媒体Pを間欠搬送させている。
なお、本実施例の記録装置1はこのような構成の記録機構4を備えているが、このような構成に限定されず、例えば、ラインヘッドを有する記録機構を備える構成でもよい。
図3は、本実施例の記録装置1のブロック図である。
制御部20には、記録装置1の全体の制御を司るCPU21が設けられている。CPU21は、システムバス22を介して、CPU21が実行する各種制御プログラム等を格納したROM23と、データを一時的に格納可能なRAM24と接続されている。また、CPU21は、システムバス22を介して、記録ヘッド7を駆動するためのヘッド駆動部25と接続されている。
ここで、キャリッジモーター26は、記録ヘッド7を搭載したキャリッジを移動させるためのモーターである。また、搬送モーター27は、搬送ローラー8を駆動するためのモーターである。また、送り出しモーター28は、回転軸5の回転機構であり、被記録媒体Pを搬送機構3に送り出すために回転軸5を駆動するモーターである。また、巻取モーター29は、巻取軸17を回転させるための駆動モーターである。そして、光学センサー移動モーター36は、光学センサー19を搬送方向Aに沿って移動させるために使用されるモーターである。
さらに、CPU21は、被記録媒体Pにおける障害物を検出可能な光学センサー19と、記録装置1に設けられたモニター34及びコントロールパネル35と、並びに、記録データ等をPC等の外部装置から入力する等のためのインターフェース31と、データ及び信号の送受信を行うための入出力部30と接続されている。
次に、本発明の実施例2に係る記録装置について説明する。
図4は、本発明の実施例2に係る記録装置を表す概略平面図である。なお、上記実施例と共通する構成部材は同じ符号で示しており、詳細な説明は省略する。
制御部20は、記録装置1に入力された記録データに基づく記録を行う場合、画像Iの搬送方向Aの長さL1よりも記録機構4から前記検出位置までの搬送方向Aの距離L2が長くなる範囲に前記検出位置を設定可能な場合、該範囲に前記検出位置を設定する。具体的には、前記長さL1よりも前記距離L2が長くなる範囲にある光学センサー(発光部U1、受光部U2)を使用する光学センサーとして選択する。
一方、制御部20は、画像Iが搬送方向Aに長く、前記長さL1よりも前記距離L2が長くなる範囲の光学センサーを選択可能でない場合、予め定められた所定の光学センサーを使用する光学センサーとして選択する。
次に、本発明の一実施例に係る記録方法について説明する。
図5は、本発明の一実施例に係る記録方法を表すフローチャートである。
なお、本実施例の記録方法は、上記実施例1の記録装置1を用いて行った実施例である。
次に、ステップS120において、制御部20は、ステップS110での演算結果に基づいて、前記長さL1よりも記録機構4から検出位置までの搬送方向Aの距離L2が長くなる範囲に検出位置を設定可能かどうかについて判断する。設定可能と判断した場合はステップS130に進み、設定可能でないと判断した場合はステップS140に進む。
ステップS140においては、予め定められた所定の位置に検出位置を設定し、ステップS150に進む。
そして、ステップS150において、ステップS130又はステップS140で設定された検出位置に搬送方向Aに沿って光学センサー19を移動する。
次に、ステップS170において、制御部20は障害物の検出有無を判断する。本ステップにおいて、障害物を検出していないと判断した場合はステップS180に進み、障害物を検出したと判断した場合は本実施例の記録方法を終了する。
ステップS180においては、制御部20は、記録装置1に入力された記録データの記録が終了したかどうかを判断する。本ステップにおいて、記録が終了していないと判断した場合は記録が終了したと判断するまでステップS170とステップS180とを繰り返し、記録が終了したと判断した場合は本実施例に係る記録方法を終了する。
なお、本実施例の記録方法において、ステップS170及びステップS180は、記録ヘッド7の1回の記録走査毎に対応して行われる。
5 セット部2の回転軸、6 従動ローラー、7 記録ヘッド、
8 搬送ローラー(移動機構)、9 従動ローラー、10 グルーベルト(支持部)、
11 従動ローラー、12 加圧ローラー、13 洗浄ユニット、14 トレイ、
15 洗浄機構、16 カッター、17 巻取軸、18 巻取機構、
19 光学センサー、19a 発光部、19b 受光部、20 制御部、
21 CPU、22 システムバス、23 ROM、24 RAM、
25 ヘッド駆動部、26 キャリッジモーター、27 搬送モーター、
28 送り出しモーター、29 巻取モーター、30 入出力部、
31 インターフェース、32 モーター駆動部、33 カッター駆動部、
34 モニター、35 コントロールパネル、36 光学センサー移動モーター、
37a 発光部、37b 受光部、P 被記録媒体
Claims (7)
- 被記録媒体を支持する支持部と、
記録データに基づいて前記支持部に支持された前記被記録媒体に記録する記録機構と、
前記支持部と前記記録機構とを相対移動可能な移動機構と、
記録を実行する際に前記被記録媒体における障害物を前記相対移動方向において前記記録機構に対して検出位置を移動させることなく検出可能であって、前記検出位置を前記記録機構に対して前記相対移動方向に移動可能な検出部と、を備えることを特徴とする記録装置。 - 請求項1に記載の記録装置において、
前記記録データに基づく記録を行った場合の、前記被記録媒体に記録される画像の前記相対移動方向の長さを演算する演算部と、
前記記録データに基づいて前記検出位置を設定可能であって、前記長さよりも前記記録機構から前記検出位置までの前記相対移動方向の距離が長くなる範囲に前記検出位置を設定可能な場合、該範囲に前記検出位置を設定する設定部と、を備えることを特徴とする記録装置。 - 請求項2に記載の記録装置において、
前記検出部は、前記相対移動方向に移動可能な光学センサーであり、
前記設定部は、前記記録データに基づいて前記光学センサーの位置を設定することで前記検出位置を設定することを特徴とする記録装置。 - 請求項2に記載の記録装置において、
前記検出部は、前記相対移動方向に複数並べられる光学センサーを有し、
前記設定部は、前記記録データに基づいて使用する光学センサーを選択することで前記検出位置を設定することを特徴とする記録装置。 - 請求項1から4のいずれか1項に記載の記録装置において、
前記支持部は、被記録媒体を載置して搬送可能なグルーベルトであり、
前記移動機構は、前記グルーベルトを駆動する駆動機構であり、
前記障害物は、前記グルーベルトに対する前記被記録媒体の貼り付き不良部分であることを特徴とする記録装置。 - 被記録媒体を支持する支持部と、記録データに基づいて前記支持部に支持された前記被記録媒体に記録する記録機構と、前記支持部と前記記録機構とを相対移動可能な移動機構と、記録を実行する際に前記被記録媒体における障害物を前記相対移動方向において前記記録機構に対して検出位置を移動させることなく検出可能な検出部と、を備える記録装置を用いて行う記録方法であって、
前記検出位置を前記記録機構に対して前記相対移動方向に移動する移動工程を有することを特徴とする記録方法。 - 請求項6に記載の記録方法において、
前記記録データに基づく記録を行った場合の、前記被記録媒体に記録される画像の前記相対移動方向の長さを演算する演算工程と、
前記長さよりも前記記録機構から前記検出位置までの前記相対移動方向の距離が長くなる範囲に前記検出位置を設定することができる場合、該範囲に前記検出位置を設定する設定工程と、を有し、
前記移動工程は、前記設定工程での設定に従って前記検出位置を移動することを特徴とする記録方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013011789A JP6268709B2 (ja) | 2013-01-25 | 記録装置及び記録方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013011789A JP6268709B2 (ja) | 2013-01-25 | 記録装置及び記録方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014141037A true JP2014141037A (ja) | 2014-08-07 |
| JP6268709B2 JP6268709B2 (ja) | 2018-01-31 |
Family
ID=
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019018409A (ja) * | 2017-07-13 | 2019-02-07 | セイコーエプソン株式会社 | 液体吐出装置及び干渉物の検出方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11192694A (ja) * | 1997-12-29 | 1999-07-21 | Canon Inc | インクジェットプリント装置 |
| JP2002080146A (ja) * | 2000-09-05 | 2002-03-19 | Fuji Xerox Co Ltd | シート搬送装置 |
| JP2005029333A (ja) * | 2003-07-11 | 2005-02-03 | Konica Minolta Business Technologies Inc | インクジェット記録装置 |
| JP2005127723A (ja) * | 2003-10-21 | 2005-05-19 | Dainippon Printing Co Ltd | ラインセンサの光軸調整用指標表示体およびこれを用いた光軸調整方法 |
| JP2006341474A (ja) * | 2005-06-08 | 2006-12-21 | Olympus Corp | 画像記録装置 |
| JP2009051114A (ja) * | 2007-08-28 | 2009-03-12 | Brother Ind Ltd | 布帛印刷装置、種別報知方法及び布帛印刷プログラム |
| JP2009154368A (ja) * | 2007-12-26 | 2009-07-16 | Brother Ind Ltd | インクジェット記録装置 |
| JP2011079214A (ja) * | 2009-10-07 | 2011-04-21 | Seiko Epson Corp | 描画装置、描画装置の描画方法およびプログラム |
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11192694A (ja) * | 1997-12-29 | 1999-07-21 | Canon Inc | インクジェットプリント装置 |
| JP2002080146A (ja) * | 2000-09-05 | 2002-03-19 | Fuji Xerox Co Ltd | シート搬送装置 |
| JP2005029333A (ja) * | 2003-07-11 | 2005-02-03 | Konica Minolta Business Technologies Inc | インクジェット記録装置 |
| JP2005127723A (ja) * | 2003-10-21 | 2005-05-19 | Dainippon Printing Co Ltd | ラインセンサの光軸調整用指標表示体およびこれを用いた光軸調整方法 |
| JP2006341474A (ja) * | 2005-06-08 | 2006-12-21 | Olympus Corp | 画像記録装置 |
| JP2009051114A (ja) * | 2007-08-28 | 2009-03-12 | Brother Ind Ltd | 布帛印刷装置、種別報知方法及び布帛印刷プログラム |
| JP2009154368A (ja) * | 2007-12-26 | 2009-07-16 | Brother Ind Ltd | インクジェット記録装置 |
| JP2011079214A (ja) * | 2009-10-07 | 2011-04-21 | Seiko Epson Corp | 描画装置、描画装置の描画方法およびプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019018409A (ja) * | 2017-07-13 | 2019-02-07 | セイコーエプソン株式会社 | 液体吐出装置及び干渉物の検出方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8985737B2 (en) | Recording apparatus and recording method | |
| US9844959B2 (en) | Recording device | |
| JP6264538B2 (ja) | 記録装置及び記録方法 | |
| EP2754557B1 (en) | Recording apparatus and recording method | |
| JP6277809B2 (ja) | 記録装置及び搬送ベルトの洗浄方法 | |
| JP6268709B2 (ja) | 記録装置及び記録方法 | |
| EP2857335B1 (en) | Recording apparatus and recording method | |
| JP2014141037A (ja) | 記録装置及び記録方法 | |
| US9682578B2 (en) | Recording apparatus, method for transporting recording medium, and method for notifying information of remaining amount of recording medium | |
| JP6528944B2 (ja) | 液体吐出装置 | |
| JP6288436B2 (ja) | 記録装置及び被記録媒体の搬送方法 | |
| US20140285598A1 (en) | Recording apparatus | |
| JP6119975B2 (ja) | 記録装置及び記録方法 | |
| JP6066070B2 (ja) | 記録装置及び記録方法 | |
| JP2016132139A (ja) | 記録装置 | |
| EP2759409B1 (en) | Recording apparatus and recording method | |
| JP2014148155A (ja) | 記録装置及び記録方法 | |
| JP2014172692A (ja) | 記録装置及び記録装置の待機方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151125 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160614 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161102 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170817 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6268709 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |