JP2014159057A - ロボット支持装置およびロボット支持装置の設置方法 - Google Patents
ロボット支持装置およびロボット支持装置の設置方法 Download PDFInfo
- Publication number
- JP2014159057A JP2014159057A JP2013030655A JP2013030655A JP2014159057A JP 2014159057 A JP2014159057 A JP 2014159057A JP 2013030655 A JP2013030655 A JP 2013030655A JP 2013030655 A JP2013030655 A JP 2013030655A JP 2014159057 A JP2014159057 A JP 2014159057A
- Authority
- JP
- Japan
- Prior art keywords
- flat plate
- shaped portion
- rail
- hole
- mounting surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 31
- 238000009434 installation Methods 0.000 title description 20
- 230000007246 mechanism Effects 0.000 claims description 17
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 claims description 10
- 230000000052 comparative effect Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images







Landscapes
- Manipulator (AREA)
Abstract
【課題】ロボット支持装置のレール部材の位置決めを容易に精度良く短時間で行う。
【解決手段】ロボット支持装置は、複数のレール部材と複数のブラケット部材とを備える。各ブラケット部材は、互いに直交する第1の平板形状部分と第2の平板形状部分とを有する第1の部材と、第3の平板形状部分を有すると共に第3の平板形状部分が第2の平板形状部分と平行となる姿勢で第2の平板形状部分に固定される第2の部材とを含む。第1の平板形状部分の第1の孔は、第2の平板形状部分に直交する第1の方向に伸びる形状であり、第2の平板形状部分の第2の孔は、第1の方向に直交する第2の方向に伸びる形状であり、第3の平板形状部分の第3の孔は、第1,2の方向に直交する第3の方向に伸びる形状である。各第1の部材は、第1の平板形状部分が水平方向となる姿勢で載置面上に直接固定される。
【選択図】図4
【解決手段】ロボット支持装置は、複数のレール部材と複数のブラケット部材とを備える。各ブラケット部材は、互いに直交する第1の平板形状部分と第2の平板形状部分とを有する第1の部材と、第3の平板形状部分を有すると共に第3の平板形状部分が第2の平板形状部分と平行となる姿勢で第2の平板形状部分に固定される第2の部材とを含む。第1の平板形状部分の第1の孔は、第2の平板形状部分に直交する第1の方向に伸びる形状であり、第2の平板形状部分の第2の孔は、第1の方向に直交する第2の方向に伸びる形状であり、第3の平板形状部分の第3の孔は、第1,2の方向に直交する第3の方向に伸びる形状である。各第1の部材は、第1の平板形状部分が水平方向となる姿勢で載置面上に直接固定される。
【選択図】図4
Description
本発明は、ロボット支持装置およびロボット支持装置の設置方法に関する。
工場等のサイトにおいて、ロボットを摺動可能に支持するロボット支持装置が使用されている。ロボット支持装置は、水平方向に伸びるレールを有し、ロボットを、レールに沿って摺動することができる状態で支持する。このようなロボット支持装置は、例えば、レールに沿って並んだ複数の設備間におけるワーク搬送を行うロボットを支持するために使用される。
なお、本明細書では、水平とは、実質的に水平であることを意味し、厳密な水平に加えて略水平(例えば、厳密な水平からの傾きがプラスマイナス10度以下である状態)も含むものとする。また、鉛直とは、実質的に鉛直であることを意味し、厳密な鉛直に加えて略鉛直(例えば、厳密な鉛直からの傾きがプラスマイナス10度以下である状態)も含むものとする。
ロボット支持装置に必要とされるレールの長さは、サイトに応じて異なり得る。また、必要レール長は、レールを単一部品として製造・搬入・設置するには長すぎる場合がある。そのため、一般に、所定の長さの複数のレール部材が準備され、各レール部材が水平の一直線上に連続的に並べられて固定されることにより、各レール部材の長さより長い1つのレールが構成される。より具体的には、サイトの床面上に複数の架台がレール方向に沿って並べて設置され、各架台の水平の載置面上にレール部材が設置されることにより、1つのレールが構成される。この場合に、複数のレール部材から構成されたレール上をロボットがスムーズに摺動できるようにするために、各レール部材の位置決めを精度良く実行することが求められる。
従来、一方の建屋に設けられたキャリア走行レールと他方の建屋に設けられたキャリア走行レールとを接続する際の位置ずれによる問題を解決するために、2つの走行レール間に自在継手レールを設置する技術が知られている(例えば、特許文献1参照)。
上述のようなロボット支持装置を設置する際には、各架台の載置面上に1つのレール部材を設置し、各架台の水平位置を調整したり、各架台の足の長さを調整することによって載置面の高さおよび傾きを調整したりすることにより、各架台上に設置された各レール部材の位置決めが行われていた。しかし、一般に、架台は大きくて重い(例えば、単独で20kg程度、レール部材を含めると30kg程度)ため、架台を移動させるには多大な労力を要する上に、架台を移動させることによるレール部材の位置決めは精度が低くなりがちであった。また、一般に、サイトの床面は比較的平面度が低いため、架台の足の長さを調整することによって載置面の高さおよび傾きを調整した後に架台を水平方向に移動させると、載置面の高さおよび傾きの再調整が必要になる場合がある。そのため、レール部材の位置決めに多大な時間を要する場合があった。
なお、上記従来技術は、サイトの床面に設置された架台上のレール部材の位置決めに関するものではない上、2つのレール間に自在継手レールという付加的なレール部材を要するものであり、そのような付加的なレール部材を要さずに、上記課題を解決するものではなかった。
本発明は、上述の課題を解決するためになされたものであり、ロボット支持装置のレール部材の位置決めを容易に精度良く短時間で行うことができる技術を提供することを目的とする。
本発明は、上述の課題を解決するため、以下の形態として実現することが可能である。
(1)本発明の一形態によれば、ロボット支持装置が提供される。このロボット支持装置は、前記ロボットを摺動可能に支持する複数のレール部材と、水平の一直線上に連続的に並べられた前記複数のレール部材を支持すると共に、サイトの床面に設置された架台における載置面上に固定される複数のブラケット部材と、を備え、各前記ブラケット部材は、第1の平板形状部分と、前記第1の平板形状部分に直交する第2の平板形状部分と、を有する第1の部材と、第3の平板形状部分を有すると共に、前記第3の平板形状部分が前記第1の部材の前記第2の平板形状部分と平行となる姿勢で前記第1の部材の前記第2の平板形状部分に固定される第2の部材と、を含み、前記第1の平板形状部分に形成された第1の孔は、前記第2の平板形状部分に直交する第1の方向に伸びる形状であり、前記第2の平板形状部分に形成された第2の孔は、前記第1の方向に直交する第2の方向に伸びる形状であり、前記第3の平板形状部分に形成された第3の孔は、前記第1の方向および前記第2の方向に直交する第3の方向に伸びる形状であり、各前記第1の部材は、前記第1の平板形状部分が水平方向となる姿勢で、前記第1の孔に挿入された第1の締結部材によって前記載置面上に直接固定され、各前記第2の部材は、前記レール部材に固定されると共に、前記第2の孔と前記第3の孔とに挿入された第2の締結部材によって、前記第1の部材の前記第2の平板形状部分に固定される。この形態のロボット支持装置によれば、ブラケット部材の第1の部材を、第1の平板形状部分が水平方向となる姿勢で載置面上に載置し、レール部材に固定された第2の部材を、第3の平板形状部分が第1の部材の第2の平板形状部分と平行となる姿勢で、第2の孔と第3の孔とに挿入された第2の締結部材によって第1の部材の第2の平板形状部分に仮固定し、第2の部材を鉛直方向に沿って移動させることによりレール部材の鉛直方向に沿った位置を調整すると共に第1の部材および第2の部材を載置面上で水平移動させることによりレール部材の水平位置を調整し、レール部材の位置を維持しつつ第1の孔が載置面上に形成された孔に連通する位置まで第1の部材を載置面上で水平移動させ、第1の孔と載置面上の孔とに挿入された第1の締結部材によって第1の部材を載置面上に固定し、第2の締結部材によって第2の部材を第1の部材に本固定することにより、レール部材の位置決めを精度良く行うことができる。すなわち、この形態のロボット支持装置は、各部材の形状や孔の形状、各部材間の位置関係等を上述のように規定することにより、レール部材の精度良い位置決めを実現している。そのため、レール部材の位置決めのために、比較的大きくて重い架台を移動させたり、比較的平面度の低い床面上で架台の高さを調整したりする必要がなく、レール部材の位置決めを容易に精度良く短時間で行うことができる。さらに、この形態のロボット支持装置によれば、第1の部材が架台の載置面上に直接固定されるため、第2の部材の平行度や平面度の精度を高めることなく、調整済みのレール部材の高さが第1の部材の水平方向移動に伴ってずれることを抑制することができ、レール部材の位置決めを極めて容易に精度良く短時間で行うことができる。
(2)上記形態のロボット支持装置において、各前記ブラケット部材は、さらに、鉛直方向に沿った前記第1の部材と前記第2の部材との相対位置を調整する高さ調整機構を含むとしてもよい。この形態のロボット支持装置によれば、高さ調整機構によってレール部材の鉛直方向に沿った位置を調整した後に、調整されたレール部材の鉛直方向に沿った位置を維持しつつレール部材の水平位置を調整することができるため、レール部材の位置決めをより容易に精度良く短時間で行うことができる。
(3)本発明の他の一形態によれば、ロボット支持装置の設置方法が提供される。このロボット支持装置の設置方法は、前記ロボットを摺動可能に支持する複数のレール部材を準備する工程と、水平の一直線上に連続的に並べられた前記複数のレール部材を複数のブラケット部材で支持すると共に、サイトの床面に設置された架台における載置面上に前記複数のブラケット部材を固定する工程と、を備え、各前記ブラケット部材は、第1の平板形状部分と、前記第1の平板形状部分に直交する第2の平板形状部分と、を有する第1の部材と、第3の平板形状部分を有すると共に、前記第3の平板形状部分が前記第1の部材の前記第2の平板形状部分と平行となる姿勢で前記第1の部材の前記第2の平板形状部分に固定される第2の部材と、を含み、前記第1の平板形状部分に形成された第1の孔は、前記第2の平板形状部分に直交する第1の方向に伸びる形状であり、前記第2の平板形状部分に形成された第2の孔は、前記第1の方向に直交する第2の方向に伸びる形状であり、前記第3の平板形状部分に形成された第3の孔は、前記第1の方向および前記第2の方向に直交する第3の方向に伸びる形状であり、前記固定する工程は、前記第1の部材を、前記第1の平板形状部分が水平方向となる姿勢で、前記載置面上に直接載置する工程と、前記レール部材に固定された前記第2の部材を、前記第2の孔と前記第3の孔とに挿入された第2の締結部材によって、前記第1の部材の前記第2の平板形状部分に仮固定する工程と、前記第2の部材を鉛直方向に沿って移動させることにより、前記レール部材の鉛直方向に沿った位置を調整すると共に、前記第1の部材および前記第2の部材を前記載置面上で水平移動させることにより、前記レール部材の水平位置を調整する工程と、前記レール部材の位置を維持しつつ、前記第1の孔が前記載置面上に形成された孔に連通する位置まで前記第1の部材を前記載置面上で水平移動させ、前記第1の孔と前記載置面上の前記孔とに挿入された第1の締結部材によって前記第1の部材を前記載置面上に固定する工程と、前記第2の締結部材によって、前記第2の部材を前記第1の部材に本固定する工程と、を含む。この形態のロボット支持装置の設置方法によれば、ブラケット部材の第1の部材を、第1の平板形状部分が水平方向となる姿勢で載置面上に載置し、レール部材に固定された第2の部材を、第3の平板形状部分が第1の部材の第2の平板形状部分と平行となる姿勢で、第2の孔と第3の孔とに挿入された第2の締結部材によって第1の部材の第2の平板形状部分に仮固定し、第2の部材を鉛直方向に沿って移動させることによりレール部材の鉛直方向に沿った位置を調整すると共に第1の部材および第2の部材を載置面上で水平移動させることによりレール部材の水平位置を調整し、レール部材の位置を維持しつつ第1の孔が載置面上に形成された孔に連通する位置まで第1の部材を載置面上で水平移動させ、第1の孔と載置面上の孔とに挿入された第1の締結部材によって第1の部材を載置面上に固定し、第2の締結部材によって第2の部材を第1の部材に本固定することにより、レール部材の位置決めを精度良く行うことができる。すなわち、この形態のロボット支持装置の設置方法は、各部材の形状や孔の形状、各部材間の位置関係、設置方法等を上述のように規定することにより、レール部材の精度良い位置決めを実現している。そのため、レール部材の位置決めのために、比較的大きくて重い架台を移動させたり、比較的平面度の低い床面上で架台の高さを調整したりする必要がなく、レール部材の位置決めを容易に精度良く短時間で行うことができる。さらに、この形態のロボット支持装置の設置方法によれば、第1の部材が架台の載置面上に直接固定されるため、第2の部材の平行度や平面度の精度を高めることなく、調整済みのレール部材の高さが第1の部材の水平方向移動に伴ってずれることを抑制することができ、レール部材の位置決めを極めて容易に精度良く短時間で行うことができる。
本発明は、ロボット支持装置およびロボット支持装置の設置方法以外の種々の形態で実現することも可能である。例えば、ロボット支持装置とロボットとを備えるロボットシステム、該ロボットシステムの設置方法等の形態で実現することができる。
A.実施形態:
A−1.ロボットシステムの構成:
図1は、本発明の実施形態におけるロボットシステム10の概略構成を示す説明図である。ロボットシステム10は、ロボット20と、ロボット20を水平方向(以下、「X方向」という)に沿って摺動可能に支持するロボット支持装置12と、ロボット支持装置12を支持する架台30と、を備えている。
A−1.ロボットシステムの構成:
図1は、本発明の実施形態におけるロボットシステム10の概略構成を示す説明図である。ロボットシステム10は、ロボット20と、ロボット20を水平方向(以下、「X方向」という)に沿って摺動可能に支持するロボット支持装置12と、ロボット支持装置12を支持する架台30と、を備えている。
ロボット20は、X方向に直交する水平方向であるY方向に沿って伸縮する間接と、鉛直方向(以下、「Z方向」という)に沿って伸縮する間接と、を有している。ロボット20は、例えば、X方向に沿って並んだ複数の設備間におけるワーク搬送に利用される。すなわち、ロボット20は、ある設備において所定の作業がなされたワークをつかみ、該ワークを保持した状態で次の設備に対向する位置までロボット支持装置12上をX方向に沿って移動し、次の設備にワークを渡すことができる。
架台30は、ロボット支持装置12を設置するための水平面である載置面34を提供する台であり、サイト(例えば工場)の床面FL上に設置される。図1には、2つの架台30を示している。以下、各架台30を区別するときには、一方の架台30を架台30Aと呼び、他方の架台30を架台30Bと呼ぶ。各架台30は、略直方体形状であり、上面が載置面34として機能する。また、各架台30は、個別に高さ調整可能な4つの脚部32を有しており、各脚部32の高さを調整することにより、載置面34の高さおよび傾きを調整することができる。
各架台30は、各載置面34の長手方向の中心軸がX方向に沿った一直線上に位置する状態となるように、連続的に並べられる。また、各架台30の載置面34が水平面となり、かつ、載置面34の高さ(鉛直方向に沿った位置)が他の架台30の載置面34の高さと揃う(同じ高さとなる)ように、各脚部32の高さが調整される。ただし、架台30は大きくて重い(例えば20kg程度の重量を有する)ため、架台30の水平位置(すなわち、載置面34の水平位置)を細かく調整することは多大な労力を要する上に精度も低くなりがちである。また、一般に、サイトの床面FLの平面度は低いため、載置面34の高さおよび傾きを調整した後に架台30を水平方向に再度移動させると、載置面34の高さおよび傾きが変化してしまう場合がある。そこで、本実施形態では、架台30(載置面34)の位置や高さの調整には精度を求めず、各載置面34の中心軸がおおよそX方向に沿った一直線上に位置する状態となり、各載置面34の高さが互いにおおよそ揃うように実行される。このような架台30(載置面34)の位置および高さの調整は、比較的容易に短時間で行うことができる。
ロボット支持装置12は、複数のレール部材40と、複数のブラケット部材50と、を備えている。レール部材40は、ロボット20を軸方向に沿って一端部から他端部まで摺動可能に支持する部材である。図1には、2つのレール部材40を示している。各レール部材40は、各架台30に対応している。以下、各レール部材40を区別するときには、架台30Aに対応するレール部材40をレール部材40Aと呼び、架台30Bに対応するレール部材40をレール部材40Bと呼ぶ。各レール部材40は、水平(X方向)の一直線上に連続的に並べられ、1つのレールを構成する。このように複数のレール部材40から構成されたレール上をロボット20がスムーズに摺動できるようにするためには、各レール部材40の位置決めを精度良く実行することが求められる。
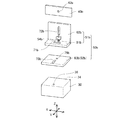
ブラケット部材50は、レール部材40を支持すると共に、架台30における載置面34上に固定される部材である。図1には、5つのブラケット部材50を示している。図2は、ブラケット部材50の構成を概念的に示す説明図である。図2には、ブラケット部材50の構成をわかりやすくするため、図1に示した実施形態におけるブラケット部材50の一部の構成を簡略化して示したり、図示を省略したりしている。
図2に示すように、ブラケット部材50は、第1の部材51と第2の部材52とを有している。第1の部材51は、互いに直交する第1の平板形状部分61と第2の平板形状部分62とから構成された略L字形断面の部材である。なお、第1の部材51は、必ずしも第1の平板形状部分61および第2の平板形状部分62のみから構成された略L字形断面の部材である必要はなく、第1の平板形状部分61および第2の平板形状部分62以外の部分を有するとしてもよい。
第1の部材51の第1の平板形状部分61には、第1の平板形状部分61を貫通する第1の孔71が形成されている。第1の孔71は、第1の部材51を架台30の載置面34上に固定するためのボルト(以下「第1のボルト」という)が挿入される孔である。すなわち、第1の平板形状部分61に形成された第1の孔71と載置面34上に形成された孔36とに挿入された第1のボルトにより、第1の部材51が架台30の載置面34上に固定される。図示するように、第1の部材51は、第1の平板形状部分61が水平方向となる姿勢で(すなわち、第2の平板形状部分62が鉛直方向となる姿勢で)、載置面34上に直接固定される。なお、第1の部材51が載置面34上に直接固定されるとは、第1の部材51と載置面34との間に他の部材が介在することなく、両者が直接接触した状態で固定されることを意味する。第1の平板形状部分61における載置面34との接触面は、平面度が十分に高くなるように加工されている。また、第1の孔71の平面形状(深さ方向に直交する断面形状)は、第2の平板形状部分62に直交する方向(請求項における第1の方向に相当する)に伸びる直線形状である。この方向は、第1の部材51が載置面34上に固定された状態においてはY方向となる。
第1の部材51の第2の平板形状部分62には、第2の平板形状部分62を貫通する第2の孔72が形成されている。第2の孔72は、第1の部材51と第2の部材52とを固定するためのボルト(以下「第2のボルト」という)が挿入される孔である。第2の孔72の平面形状は、第1の孔71の延伸方向に直交する方向(請求項における第2の方向に相当する)に伸びる直線形状である。この方向は、第1の部材51が載置面34上に固定された状態においてはZ方向(鉛直方向)となる。
また、第1の部材51は、高さ調整機構54を有する。高さ調整機構54は、第1の部材51と第2の部材52との相対位置関係を調整する機構である。第1の部材51が載置面34上に固定された状態において、高さ調整機構54は、第1の部材51と第2の部材52とのZ方向(鉛直方向)に沿った相対位置関係を調整する。
第2の部材52は、第3の平板形状部分63から構成された略平板形状の部材である。なお、第2の部材52は、必ずしも第3の平板形状部分63のみから構成された略平板形状の部材である必要はなく、第3の平板形状部分63以外の部分を有するとしてもよい。
第2の部材52の第3の平板形状部分63には、第3の平板形状部分63を貫通する第3の孔73が形成されている。第3の孔73は、第2の部材52と第1の部材51とを固定するための上述の第2のボルトが挿入される孔である。すなわち、第3の平板形状部分63に形成された第3の孔73と第1の部材51の第2の平板形状部分62に形成された第2の孔72とに挿入された第2のボルトにより、第2の部材52と第1の部材51とが互いに固定される。図示するように、第2の部材52は、第3の平板形状部分63が第1の部材51の第2の平板形状部分62と平行となる姿勢で(すなわち、第3の平板形状部分63が鉛直方向となる姿勢で)、第1の部材51に固定される。また、第3の孔73の平面形状は、第1の孔71の延伸方向と第2の孔72の延伸方向とに直交する方向(請求項における第3の方向に相当する)に伸びる直線形状である。この方向は、第2の部材52が第1の部材51を介して載置面34上に固定された状態においてはX方向となる。このように、第1の孔71と第2の孔72と第3の孔73との形状は、それぞれ互いに直交する方向に延伸する直線形状である。
第2の部材52の第3の平板形状部分63には、また、第2の部材52とレール部材40とを固定するためのボルト(以下「第3のボルト」という)が挿入される孔75が形成されている。すなわち、第3の平板形状部分63に形成された孔75とレール部材40に形成された孔42とに挿入された第3のボルトにより、第2の部材52とレール部材40とが互いに固定される。レール部材40は、第2の部材52および第1の部材51を介して、架台30の載置面34上に固定されることとなる。
図1に示した実施形態におけるブラケット部材50の構成は、第1の平板形状部分61、第2の平板形状部分62、第3の平板形状部分63のそれぞれに形成された孔(第1の孔71、第2の孔72、第3の孔73)の数が異なるものの、基本的には図2に示した構成と同様の構成である。
A−2.ロボット支持装置12の設置方法:
次に、ロボット支持装置12の設置方法について説明する。上述したように、ロボット支持装置12の2つのレール部材40により構成される単一のレールの一端から他端までロボット20をスムーズに摺動可能とするために、各レール部材40は、水平の一直線上に連続的に並べられる必要がある。そのため、ロボット支持装置12を設置する際には、各レール部材40の位置決めが精度良く実行される必要がある。
次に、ロボット支持装置12の設置方法について説明する。上述したように、ロボット支持装置12の2つのレール部材40により構成される単一のレールの一端から他端までロボット20をスムーズに摺動可能とするために、各レール部材40は、水平の一直線上に連続的に並べられる必要がある。そのため、ロボット支持装置12を設置する際には、各レール部材40の位置決めが精度良く実行される必要がある。
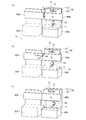
図3は、ロボット支持装置12の設置方法を示すフローチャートである。また、図4は、ロボット支持装置12の設置方法を概念的に示す説明図である。以下では、図4に示すように、図2に示したブラケット部材50を用いたレール部材40Bの位置決めについて説明する。前提として、図4(a)に示すように、サイトの床面FL上に1つの架台30Aが設置され、架台30A上に1つのレール部材40Aがその軸がX方向を向くような姿勢で固定され、他の架台30Bが床面FL上に設置され、架台30Bの載置面34上にブラケット部材50と他のレール部材40Bとが載置されているものとする。このとき、架台30Bは、その載置面34が水平面となり、載置面34の水平位置や高さが架台30Aの載置面34の水平位置および高さにおおよそ揃うように設置・調整されている。また、レール部材40Bはボルトによって第2の部材52に固定されているが、第2の部材52と第1の部材51とは第2のボルトの仮締めによって仮に固定されているのみである。第2の部材52と第1の部材51とが仮固定された状態では、第2の部材52を第1の部材51に対して移動させることができる。また、第1の部材51は、架台30Bの載置面34上に置かれているだけであって、載置面34に固定されてはいない。
まず、レール部材40Bの高さが、レール部材40Aの高さに揃うように調整される(ステップS110、図4(a))。レール部材40Bの高さ調整は、第1の部材51に設けられた高さ調整機構54を用いて実行される。高さ調整機構54は、鉛直方向(Z方向)に沿って、第1の部材51の位置に対する第2の部材52の相対位置を調整する機能を有する。そのため、架台30Bの載置面34上に設置された第1の部材51の高さ調整機構54を用いることにより、第2の部材52の高さを調整することができ、これにより第2の部材52に固定されたレール部材40Bの高さを調整することができる。上述したように、第1の部材51と第2の部材52とを固定するための第2のボルトが挿入される第2の孔72はZ方向に伸びる直線形状であるため、第1の部材51を移動させることなく、第2の部材52をZ方向に沿って移動させることができる。
次に、レール部材40Bの水平位置(すなわち、X方向およびY方向に沿った位置)が、レール部材40Aの水平位置に揃うように(レール部材40Aとレール部材40BとがX方向の一直線上に連続的に並ぶように)調整される(ステップS120、図4(b))。レール部材40Bの水平位置調整は、架台30Bの載置面34上で、ブラケット部材50(第1の部材51および第2の部材52)を水平方向に移動させることにより実行される。上述したように、第2の部材52とレール部材40Bとは固定されているため、ブラケット部材50を水平方向に移動させることにより、レール部材40Bの水平方向の位置を調整することができる。ここで、架台30Bの載置面34は水平面となるように調整されており、また、第1の部材51の第1の平板形状部分61(図2参照)における載置面34との接触面の平面度は十分に高い。そのため、ブラケット部材50を水平方向に移動させることによってレール部材40Bの水平方向の位置を調整しても、それによって既に調整済みのレール部材40Bの高さがずれることはない。従って、レール部材40Bの水平位置調整を完了した時点で、高さおよび水平位置の両者の点で、レール部材40Bはレール部材40Aに揃うこととなる。この状態で、レール部材40Aとレール部材40Bとが連結される。
次に、第1の部材51の水平位置が調整される(ステップS130、図4(c))。具体的には、第1の部材51に形成された第1の孔71が架台30Bの載置面34に形成された孔36(図2参照)と連通する状態となる位置まで、第1の部材51をX方向に沿って移動させる。上述したように、第1の部材51を架台30の載置面34に固定するための第1のボルトが挿入される第1の孔71はY方向に伸びる直線形状であるため、第1の部材51をX方向に沿って移動させることによって、第1の孔71と架台30Bの載置面34に形成された孔36とを連通させることができる。また、第2の部材52を第1の部材51に固定するための第2のボルトが挿入される第3の孔73はX方向に伸びる直線形状であるため、第1の部材51をX方向に沿って移動させても、第3の孔73と第2のボルトとの相対位置が変化するだけで、第2の部材52(および第2の部材52に固定されたレール部材40B)は移動しない。そのため、第1の部材51の水平位置を調整しても、レール部材40Aとレール部材40Bとが高さおよび水平位置の点で互いに揃った状態が維持される。
最後に、第1の部材51に形成された第1の孔71および架台30Bに形成された孔36に第1のボルトを挿入して本締めすることにより、第1の部材51が架台30Bの載置面34上に本固定される。また、第1の部材51に形成された第2の孔72と第2の部材52に形成された第3の孔73とに挿入された第2のボルトを本締めすることにより、第1の部材51と第2の部材52とが本固定される(ステップS140)。これにより、レール部材40Bは、高さおよび水平位置がレール部材40Aに揃った状態で、ブラケット部材50を介して架台30Bの載置面34上に固定される。
以上説明したロボット支持装置12の設置方法では、ブラケット部材50を構成する第1の部材51および第2の部材52に形成された3つの孔(第1の孔71、第2の孔72および第3の孔73)の形状が、それぞれ互いに直交する方向に延伸する直線形状であるため、架台30Bを、その載置面34の水平位置や高さが架台30Aの載置面34の水平位置および高さにおおよそ揃うように設置・調整されていれば、比較的小さくて軽いブラケット部材50の位置を調整することによって、レール部材40Bの位置をレール部材40Aに精度良く揃えることができる。そのため、レール部材40Bの位置決めのために、比較的大きくて重い架台30Bを移動させたり、比較的平面度の低い床面FL上で架台30Bの脚部32の高さを調整したりする必要がない。従って、このロボット支持装置12の設置方法によれば、レール部材40Bの位置決めを容易に精度良く短時間で行うことができる。
また、このロボット支持装置12の設置方法では、最初にレール部材40Bの高さが調整され、次にブラケット部材50を架台30Bの載置面34上で水平方向に移動させることによりレール部材40Bの水平位置が調整されるため、何らかの部材を空中に保持しつつ位置調整を行うような作業が必要ではなく、レール部材40Bの位置決めを極めて容易に精度良く短時間で行うことができる。
また、このロボット支持装置12の設置方法では、上述したように、第1の部材51が架台30Bの載置面34上に直接固定されるため、レール部材40Bの高さ調整(図3のステップS110)後のレール部材40Bの水平位置調整(ステップS120)の際に、ブラケット部材50を水平方向に移動しても、それによって既に調整済みのレール部材40Bの高さがずれることが抑制される。この点について、以下説明する。
図5および図6は、比較例におけるブラケット部材(ブラケット部材50a,50b)の構成を示す説明図である。図5に示す第1の比較例のブラケット部材50aは、第2の部材52aの配置の点が、図2に示したブラケット部材50と異なっている。具体的には、第1の比較例のブラケット部材50aでは、第2の部材52aは、第3の平板形状部分63aが第1の部材51aの第1の平板形状部分61aと平行になるような状態で、架台30の載置面34上に直接固定される。また、第1の部材51aは、第2の部材52aを介して間接的に架台30の載置面34上に固定される。第1の比較例のブラケット部材50aでも、3つの孔(第1の孔71a、第2の孔72aおよび第3の孔73a)の形状が、それぞれ互いに直交する方向に延長する直線形状であるため、比較的小さくて軽いブラケット部材50aの位置を調整することによって、レール部材40の位置を精度良く調整することができる。ただし、第1の比較例のブラケット部材50aを用いると、レール部材40の高さ調整(図3のステップS110)後、レール部材40の水平位置調整(ステップS120)のために第1の部材51aを水平方向に移動すると、第2の部材52aの上面と下面との平行度や上面の平面度によっては、レール部材40の高さがずれる場合がある。このようなずれを防止するためには、第2の部材52aの上記平行度や平面度の精度を高める必要がある。
また、図6に示す第2の比較例のブラケット部材50bは、第1の孔71bおよび第3の孔73bの方向の点が、図5に示した第1の比較例のブラケット部材50aと異なっている。具体的には、第2の比較例のブラケット部材50bでは、第1の孔71bがX方向に伸びる直線形状であり、第3の孔73bがY方向に伸びる直線形状である。第2の比較例のブラケット部材50bは、上記点で第1の比較例のブラケット部材50aと異なるものの、第2の部材52bが架台30の載置面34上に直接固定され、第1の部材51bが第2の部材52bを介して間接的に架台30の載置面34上に固定される点では、第1の比較例のブラケット部材50aと同様である。そのため、第2の比較例のブラケット部材50bを用いると、やはり、第2の部材52bの上面と下面との平行度や上面の平面度によっては、レール部材40の高さがずれる場合があり、このようなずれを防止するためには、第2の部材52bの上記平行度や平面度の精度を高める必要がある。
これに対し、図3および図4に即して説明したロボット支持装置12の設置方法では、第1の部材51が架台30の載置面34上に直接固定されるため、第2の部材52の平行度や平面度の精度を高めることなく、第1の部材51の水平方向移動に伴う調整済みのレール部材40の高さのずれを抑制することができ、第2の部材52の平行度や平面度の精度を高めることなく、レール部材40Bの位置決めを極めて容易に精度良く短時間で行うことができる。
次に、図1に示した本実施形態におけるロボット支持装置12の設置方法について説明する。図7ないし図9は、本実施形態におけるロボット支持装置12の設置方法を示す説明図である。本実施形態では、図9に示すように、最終的に5つのブラケット部材50が設置されるが、各ブラケット部材50を区別する場合には、架台30Aにおける架台30B側とは反対側の端部に設置されるブラケット部材50から順に、ブラケット部材50(1)、ブラケット部材50(2)、ブラケット部材50(3)、ブラケット部材50(4)、ブラケット部材50(5)と呼ぶものとする。また、ブラケット部材50を構成する部材(第1の部材51および第2の部材52)についても、各部材を区別する場合には、同様に括弧付き数字を付して呼ぶものとする。
まず、図7に示すように、架台30Aと架台30Bとが設置される。架台30Aと架台30Bとの設置の際には、各架台30の載置面34の長手方向の中心軸がおおよそX方向に沿った一直線上に位置するように、調整される。また、各架台30の載置面34が水平面となり、載置面34の高さが互いにおおよそ同一の高さとなるように調整される。また、載置面34上に、3つの第1の部材51が設置される。3つの第1の部材51の内の1つ(第1の部材51(1))は、架台30Aにおける架台30B側とは反対側の端部に設置され、他の1つ(第1の部材51(3))は、架台30Aと架台30Bとに跨がるように設置され、残りの1つ(第1の部材51(2))は、架台30Aの載置面34のX方向に沿った中央付近に設置される。架台30Aと架台30Bとに跨がるように設置された第1の部材51(3)は、架台30Aと架台30Bとの内、載置面34の位置がより高い方(図7では架台30A)に設置される。
次に、図8に示すように、レール部材40Aが設置される。この際には、まず、レール部材40Aの両端部分と中央部分とに第2の部材52が連結され、レール部材40Aの一端がブラケット部材50(1)の第2の部材52(1)を介して第1の部材51(1)に固定される。次に、レール部材40Aの他端がブラケット部材50(3)の第2の部材52(3)を介して第1の部材51(3)に仮固定される。その後、レール部材40Aの軸方向が水平方向(X方向)となるように、第1の部材51(3)の高さ調整機構54によりレール部材40Aの高さが調整されると共に、ブラケット部材50(3)を移動させることによってレール部材40Aの水平位置が調整される。調整の後、レール部材40Aがブラケット部材50(3)を介して架台30Aに本固定される。また、レール部材40Aの中央部分がブラケット部材50(2)を介して架台30Aに本固定される。これにより、レール部材40Aが、レール部材40Aの軸方向がX方向となった状態で、3つのブラケット部材50を介して架台30Aの載置面34上に固定される。
次に、図9に示すように、レール部材40Bが設置される。この際には、まず、架台30Bの載置面34上に、2つの第1の部材51が設置される。2つの第1の部材51の内の1つ(第1の部材51(5))は、架台30Bにおける架台30A側とは反対側の端部に設置され、他の1つ(第1の部材51(4))は、架台30Bの載置面34のX方向に沿った中央付近に設置される。次に、レール部材40Bの両端部分と中央部分とに第2の部材52が接続され、レール部材40Bの一端が、レール部材40Aの一端と位置合わせされた状態で、第2の部材52(3)を介して第1の部材51(3)に固定される。次に、レール部材40Bの他端が、第2の部材52(5)を介して第1の部材51(5)に仮固定される。その後、レール部材40Bがレール部材40AとX方向の一直線上に連続的に並ぶ状態となるように、第1の部材51(5)の高さ調整機構54によりレール部材40Bの高さが調整されると共に、ブラケット部材50(5)を移動させることによってレール部材40Bの水平位置が調整される。調整の後、レール部材40Bがブラケット部材50(5)を介して架台30Bに本固定される。また、レール部材40Bの中央部分がブラケット部材50(4)を介して架台30Bに本固定される。これにより、レール部材40Bが、高さおよび水平位置がレール部材40Aに揃った状態で、ブラケット部材50を介して架台30Bの載置面34上に固定される。
図7ないし図9に示した本実施形態におけるロボット支持装置12の設置方法でも、架台30Bが、その載置面34の水平位置や高さが架台30Aの載置面34の水平位置および高さにおおよそ揃うように設置・調整されていれば、比較的小さくて軽いブラケット部材50の位置を調整することによって、レール部材40Bの位置をレール部材40Aに精度良く揃えることができるため、比較的大きくて重い架台30Bを移動させたり、比較的平面度の低い床面FL上で架台30Bの脚部32の高さを調整したりする必要がなく、レール部材40Bの位置決めを容易に精度良く短時間で行うことができる。また、最初にレール部材40Bの高さが調整され、次にブラケット部材50を架台30Bの載置面34上に仮置きした状態で水平方向に移動させることによりレール部材40Bの水平位置が調整されるため、何らかの部材を空中に保持しつつ位置調整を行うような作業が必要ではなく、レール部材40Bの位置決めを極めて容易に精度良く短時間で行うことができる。また、第1の部材51が架台30Bの載置面34上に直接固定されるため、レール部材40Bの高さ調整後のレール部材40Bの水平位置調整の際に、ブラケット部材50を水平方向に移動しても、それによって既に調整済みのレール部材40Bの高さがずれることが抑制され、第2の部材52の平行度や平面度の精度を高めることなく、ロボット支持装置12を設置する際のレール部材40Bの位置決めを、極めて容易に精度良く短時間で行うことができる。
B.変形例:
上記各実施形態では、ロボットシステム10が2つの架台30と、2つのレール部材40とを備えるとしたが、ロボットシステム10は、X方向に沿って並んで配置された3つ以上の架台30を備えるとしてもよく、X方向に沿って並んで配置された3つ以上のレール部材40を備えるとしてもよい。また、架台30の数とレール部材40の数とは1対1の関係である必要はなく、1つの架台30に複数のレール部材40が設置されてもよいし、1つのレール部材40が複数の架台30に跨がって設置されてもよい。また、レール部材40の数とブラケット部材50の数との関係は任意に変更可能であり、例えば、1つのレール部材40が1つのブラケット部材50により支持されてもよいし、1つのレール部材40が2つ以上の任意の数のブラケット部材50により支持されてもよい。
上記各実施形態では、ロボットシステム10が2つの架台30と、2つのレール部材40とを備えるとしたが、ロボットシステム10は、X方向に沿って並んで配置された3つ以上の架台30を備えるとしてもよく、X方向に沿って並んで配置された3つ以上のレール部材40を備えるとしてもよい。また、架台30の数とレール部材40の数とは1対1の関係である必要はなく、1つの架台30に複数のレール部材40が設置されてもよいし、1つのレール部材40が複数の架台30に跨がって設置されてもよい。また、レール部材40の数とブラケット部材50の数との関係は任意に変更可能であり、例えば、1つのレール部材40が1つのブラケット部材50により支持されてもよいし、1つのレール部材40が2つ以上の任意の数のブラケット部材50により支持されてもよい。
また、上記各実施形態において、第2の孔72の向きと第3の孔73の向きを逆としてもよい。すなわち、第2の孔72の平面形状は、X方向に伸びる直線形状であり、第3の孔73の平面形状は、Z方向に伸びる直線形状であるとしてもよい。
また、上記各実施形態において、第1の部材51が架台30に設置されたときの姿勢は、第1の平板形状部分61が水平方向となる姿勢であれば、必ずしも第2の平板形状部分62がX方向に平行となる姿勢である必要はない。第2の平板形状部分62がX方向に平行ではない姿勢であっても、第2の部材52の形状を変更することによって、レール部材40の軸方向をX方向とすることができる。ただし、第2の平板形状部分62がX方向に平行となる姿勢とすれば、第2の部材52の形状を単純な平板形状としてもレール部材40の軸方向をX方向とすることができるため、好ましい。
また、上記各実施形態において、ブラケット部材50は必ずしも高さ調整機構54を備えている必要はない。高さ調整機構54がなくても、例えば、作業者がレール部材40の高さおよび水平位置を調整した上で保持しつつ、ブラケット部材50の位置を調整して架台30に固定することにより、レール部材40の位置決めを行うことも可能である。ただし、ブラケット部材50が高さ調整機構54を備えていれば、高さ調整機構54によってレール部材40の鉛直方向に沿った位置を調整した後に、調整されたレール部材40の鉛直方向に沿った位置を維持しつつレール部材40の水平位置を調整することができるため、レール部材40の位置決めをより容易に精度良く短時間で行うことができる。
本発明は、上述の実施形態や変形例に限られるものではなく、その趣旨を逸脱しない範囲において種々の構成で実現することができる。例えば、発明の概要の欄に記載した各形態中の技術的特徴に対応する実施形態、変形例中の技術的特徴は、上述の課題の一部又は全部を解決するために、あるいは、上述の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
10…ロボットシステム
12…ロボット支持装置
20…ロボット
30…架台
32…脚部
34…載置面
36…孔
40…レール部材
42…孔
50…ブラケット部材
51…第1の部材
52…第2の部材
54…高さ調整機構
61…第1の平板形状部分
62…第2の平板形状部分
63…第3の平板形状部分
71…第1の孔
72…第2の孔
73…第3の孔
75…孔
12…ロボット支持装置
20…ロボット
30…架台
32…脚部
34…載置面
36…孔
40…レール部材
42…孔
50…ブラケット部材
51…第1の部材
52…第2の部材
54…高さ調整機構
61…第1の平板形状部分
62…第2の平板形状部分
63…第3の平板形状部分
71…第1の孔
72…第2の孔
73…第3の孔
75…孔
Claims (3)
- ロボット支持装置であって、
前記ロボットを摺動可能に支持する複数のレール部材と、
水平の一直線上に連続的に並べられた前記複数のレール部材を支持すると共に、サイトの床面に設置された架台における載置面上に固定される複数のブラケット部材と、を備え、
各前記ブラケット部材は、
第1の平板形状部分と、前記第1の平板形状部分に直交する第2の平板形状部分と、を有する第1の部材と、
第3の平板形状部分を有すると共に、前記第3の平板形状部分が前記第1の部材の前記第2の平板形状部分と平行となる姿勢で前記第1の部材の前記第2の平板形状部分に固定される第2の部材と、を含み、
前記第1の平板形状部分に形成された第1の孔は、前記第2の平板形状部分に直交する第1の方向に伸びる形状であり、
前記第2の平板形状部分に形成された第2の孔は、前記第1の方向に直交する第2の方向に伸びる形状であり、
前記第3の平板形状部分に形成された第3の孔は、前記第1の方向および前記第2の方向に直交する第3の方向に伸びる形状であり、
各前記第1の部材は、前記第1の平板形状部分が水平方向となる姿勢で、前記第1の孔に挿入された第1の締結部材によって前記載置面上に直接固定され、
各前記第2の部材は、前記レール部材に固定されると共に、前記第2の孔と前記第3の孔とに挿入された第2の締結部材によって、前記第1の部材の前記第2の平板形状部分に固定される、ロボット支持装置。 - 請求項1に記載のロボット支持装置であって、
各前記ブラケット部材は、さらに、鉛直方向に沿った前記第1の部材と前記第2の部材との相対位置を調整する高さ調整機構を含む、ロボット支持装置。 - ロボット支持装置の設置方法であって、
前記ロボットを摺動可能に支持する複数のレール部材を準備する工程と、
水平の一直線上に連続的に並べられた前記複数のレール部材を複数のブラケット部材で支持すると共に、サイトの床面に設置された架台における載置面上に前記複数のブラケット部材を固定する工程と、を備え、
各前記ブラケット部材は、
第1の平板形状部分と、前記第1の平板形状部分に直交する第2の平板形状部分と、を有する第1の部材と、
第3の平板形状部分を有すると共に、前記第3の平板形状部分が前記第1の部材の前記第2の平板形状部分と平行となる姿勢で前記第1の部材の前記第2の平板形状部分に固定される第2の部材と、を含み、
前記第1の平板形状部分に形成された第1の孔は、前記第2の平板形状部分に直交する第1の方向に伸びる形状であり、
前記第2の平板形状部分に形成された第2の孔は、前記第1の方向に直交する第2の方向に伸びる形状であり、
前記第3の平板形状部分に形成された第3の孔は、前記第1の方向および前記第2の方向に直交する第3の方向に伸びる形状であり、
前記固定する工程は、
前記第1の部材を、前記第1の平板形状部分が水平方向となる姿勢で、前記載置面上に直接載置する工程と、
前記レール部材に固定された前記第2の部材を、前記第2の孔と前記第3の孔とに挿入された第2の締結部材によって、前記第1の部材の前記第2の平板形状部分に仮固定する工程と、
前記第2の部材を鉛直方向に沿って移動させることにより、前記レール部材の鉛直方向に沿った位置を調整すると共に、前記第1の部材および前記第2の部材を前記載置面上で水平移動させることにより、前記レール部材の水平位置を調整する工程と、
前記レール部材の位置を維持しつつ、前記第1の孔が前記載置面上に形成された孔に連通する位置まで前記第1の部材を前記載置面上で水平移動させ、前記第1の孔と前記載置面上の前記孔とに挿入された第1の締結部材によって前記第1の部材を前記載置面上に固定する工程と、
前記第2の締結部材によって、前記第2の部材を前記第1の部材に本固定する工程と、を含む、ロボット支持装置の設置方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013030655A JP2014159057A (ja) | 2013-02-20 | 2013-02-20 | ロボット支持装置およびロボット支持装置の設置方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013030655A JP2014159057A (ja) | 2013-02-20 | 2013-02-20 | ロボット支持装置およびロボット支持装置の設置方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014159057A true JP2014159057A (ja) | 2014-09-04 |
Family
ID=51611187
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013030655A Pending JP2014159057A (ja) | 2013-02-20 | 2013-02-20 | ロボット支持装置およびロボット支持装置の設置方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014159057A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240044362A (ko) * | 2022-09-28 | 2024-04-04 | 니덱 인스트루먼츠 가부시키가이샤 | 산업용 로봇 |
-
2013
- 2013-02-20 JP JP2013030655A patent/JP2014159057A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240044362A (ko) * | 2022-09-28 | 2024-04-04 | 니덱 인스트루먼츠 가부시키가이샤 | 산업용 로봇 |
| KR102885471B1 (ko) * | 2022-09-28 | 2025-11-14 | 니덱 인스트루먼츠 가부시키가이샤 | 산업용 로봇 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5563845B2 (ja) | 仕口用溶接支持台 | |
| CN204381737U (zh) | 一种用于白车身试制补焊的焊接平台 | |
| US9302394B2 (en) | Positioning device | |
| JP2015196207A (ja) | 産業用ロボット | |
| JP5682721B1 (ja) | 産業用ロボットおよびその架台ユニット | |
| JP4150411B2 (ja) | ステージ装置 | |
| JP6917948B2 (ja) | 重量物の揚重装置、および、揚重運搬方法 | |
| JP2014159057A (ja) | ロボット支持装置およびロボット支持装置の設置方法 | |
| JP6470285B2 (ja) | 足場 | |
| JP2018108611A (ja) | 工作機械の位置調整方法および位置調整構造 | |
| JP2013223910A (ja) | 製缶構造物支持装置 | |
| CN101274407A (zh) | 载物台装置 | |
| US20130145893A1 (en) | Ceiling-mounted scara robot | |
| CN112166061A (zh) | 用于电力机车的可变的变压器保持设备 | |
| CN106933045A (zh) | 一种辅助支撑装置及带有辅助支撑的光刻机设备 | |
| JP4673215B2 (ja) | ステージ装置 | |
| KR101120439B1 (ko) | 액정 노광 장치 | |
| JP2016219695A (ja) | リワーク用の基板保持構造およびその基板保持構造を備えるリワーク装置 | |
| JP6983658B2 (ja) | 部品実装関連装置 | |
| CN215572719U (zh) | 一种竖向预制构件的检测装置 | |
| JP2021134538A (ja) | 位置調整装置及び位置調整方法 | |
| CN110453897B (zh) | 一种墙体砖固定装置 | |
| JP6967668B2 (ja) | 部品実装関連装置及びその高さ調整方法 | |
| KR101666990B1 (ko) | 공작기계용 베드 | |
| TWI698289B (zh) | 塗布裝置 |