JP2014163696A - 電磁波イメージングシステムの計測治具および計測方法 - Google Patents
電磁波イメージングシステムの計測治具および計測方法 Download PDFInfo
- Publication number
- JP2014163696A JP2014163696A JP2013032412A JP2013032412A JP2014163696A JP 2014163696 A JP2014163696 A JP 2014163696A JP 2013032412 A JP2013032412 A JP 2013032412A JP 2013032412 A JP2013032412 A JP 2013032412A JP 2014163696 A JP2014163696 A JP 2014163696A
- Authority
- JP
- Japan
- Prior art keywords
- scanner
- scanning
- measurement
- measured
- fastener
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Geophysics And Detection Of Objects (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
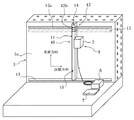
【解決手段】電磁波を媒体とするスキャナー2により被計測物3の表面3aを走査する電磁波イメージングシステム1の計測治具10であって、直線棒状の走査案内部15と、一辺の長さがスキャナー2の計測幅Wに等しい正N角形(N≧3)の断面形状を有する角柱に形成され走査案内部15の少なくとも一方の端部に同軸に設けられる回転位置決め部14と、を備えた治具本体11と、被計測物3の表面3aに固定される第1ファスナー12aと、回転位置決め部14の外面に固定される第1ファスナー12aに貼り付け可能な第2ファスナー12bとを備え、治具本体11を被計測物3に固定する面ファスナー12と、被計測物3の表面3aに固定され、スキャナー2の走査開始位置を指示する開始位置用マーカー13とを有する。
【選択図】図1
Description
2 スキャナー
3 被計測物
3a 表面
4 電磁波送受信器
5 距離センサ
6 バッテリ
7 パーソナルコンピュータ
10 計測治具
11 治具本体
12 面ファスナー
12a 第1ファスナー
12b 第2ファスナー
13 開始位置用マーカー
14 回転位置決め部
15 走査案内部
S 計測領域
Claims (7)
- 電磁波を媒体とするスキャナーにより被計測物の表面を走査する電磁波イメージングシステムの計測治具であって、
直線棒状の走査案内部と、一辺の長さが前記スキャナーの計測幅に等しい正N角形(N≧3)の断面形状を有する角柱に形成され前記走査案内部の少なくとも一方の端部に該走査案内部と同軸に設けられる回転位置決め部と、を備えた治具本体と、
前記被計測物の表面に固定される第1ファスナーと、前記回転位置決め部の外面に固定される前記第1ファスナーに貼り付け可能な第2ファスナーとを備え、前記治具本体を前記被計測物に固定する面ファスナーと、
前記被計測物の表面に固定され、前記スキャナーの走査開始位置を指示する開始位置用マーカーと、を有することを特徴とする計測治具。 - 前記被計測物の計測領域の、前記スキャナーの走査方向両側に固定される一対の前記開始位置用マーカーを有することを特徴とする請求項1に記載の計測治具。
- 前記走査案内部の両端に前記回転位置決め部が設けられるとともに、それぞれの前記回転位置決め部に固定される前記第2ファスナーに対応する2つの前記第1ファスナーを備えることを特徴とする請求項1または2に記載の計測治具。
- 電磁波を媒体とするスキャナーにより被計測物の表面を走査する電磁波イメージングシステムの計測方法であって、
前記被計測物の表面に、第1ファスナーと開始位置用マーカーとを固定する固定工程と、
直線棒状の走査案内部と、一辺の長さが前記スキャナーの計測幅に等しい正N角形(N≧3)の断面形状を有する角柱に形成され前記走査案内部の少なくとも一方の端部に該走査案内部と同軸に設けられる回転位置決め部と、を備えた治具本体を、前記回転位置決め部の外面に固定される第2ファスナーを前記第1ファスナーに貼り付けることにより、前記被計測物の表面に設置する設置工程と、
前記スキャナーを前記開始位置用マーカーから前記走査案内部に沿って移動させて前記被計測物の表面を走査する第1走査工程と、
前記回転位置決め部を前記被計測物の表面上で1/N回転させて前記治具本体を前記スキャナーの反復方向に移動させる移動工程と、
前記移動工程の後、前記スキャナーを前記開始位置用マーカーから前記走査案内部に沿って移動させて前記被計測物の表面を走査する第2走査工程と、を有することを特徴とする電磁波イメージングシステムの計測方法。 - 前記固定工程において、前記被計測物の計測領域の、前記スキャナーの走査方向両側に一対の前記開始位置用マーカーを固定し、
前記第1走査工程における前記スキャナーの走査方向と前記第2走査工程における前記スキャナーの走査方向とを逆向きとすることを特徴とする請求項4に記載の電磁波イメージングシステムの計測方法。 - 前記スキャナーに設けた距離センサにより該スキャナーの走査距離を検出することを特徴とする請求項4または5に記載の電磁波イメージングシステムの計測方法。
- 電磁波を媒体とするスキャナーにより被計測物の表面を走査する電磁波イメージングシステムの計測治具であって、
直線棒状の走査案内部と、正N角形(N≧3)の断面形状を有する角錐台に形成され前記走査案内部の少なくとも一方の端部に該走査案内部と同軸に設けられる回転位置決め部と、を備えた治具本体と、
前記被計測物の表面に固定される第1ファスナーと、前記回転位置決め部の外面に固定される前記第1ファスナーに貼り付け可能な第2ファスナーとを備え、前記治具本体を前記被計測物に固定する面ファスナーと、
前記被計測物の表面に固定され、前記スキャナーの走査開始位置を指示する開始位置用マーカーと、を有することを特徴とする計測治具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013032412A JP5917428B2 (ja) | 2013-02-21 | 2013-02-21 | 電磁波イメージングシステムの計測治具および計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013032412A JP5917428B2 (ja) | 2013-02-21 | 2013-02-21 | 電磁波イメージングシステムの計測治具および計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014163696A true JP2014163696A (ja) | 2014-09-08 |
| JP5917428B2 JP5917428B2 (ja) | 2016-05-11 |
Family
ID=51614450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013032412A Active JP5917428B2 (ja) | 2013-02-21 | 2013-02-21 | 電磁波イメージングシステムの計測治具および計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5917428B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017156247A (ja) * | 2016-03-02 | 2017-09-07 | 公益財団法人鉄道総合技術研究所 | 検査架台及び非破壊検査装置 |
| CN109061635A (zh) * | 2018-06-08 | 2018-12-21 | 深圳市华讯方舟太赫兹科技有限公司 | 旋转扫描系统 |
| JP2019128225A (ja) * | 2018-01-24 | 2019-08-01 | 応用地質株式会社 | 樹木診断用画像生成装置及び樹木診断用画像生成方法 |
| CN113514832A (zh) * | 2021-07-28 | 2021-10-19 | 吉林大学 | 基于毫米波雷达sar成像的金属探伤装置及方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS519842U (ja) * | 1974-07-09 | 1976-01-24 | ||
| JPS6131794U (ja) * | 1984-07-30 | 1986-02-26 | 敏 藤田 | 等間隔平行線引き定規 |
| JPS61105954A (ja) * | 1984-10-30 | 1986-05-24 | Toshiba Corp | ハンドスキヤナ入力方式 |
| US4944095A (en) * | 1989-12-20 | 1990-07-31 | James Anglehart | Guiding device for a computer mouse |
| JPH03146892A (ja) * | 1989-10-31 | 1991-06-21 | Awaa Bureen Kankyo Sekkei Kk | 埋設金属物体の位置表示装置 |
| JPH09269310A (ja) * | 1996-04-02 | 1997-10-14 | Kyosan Electric Mfg Co Ltd | センサ移動装置 |
| JPH1048348A (ja) * | 1996-07-31 | 1998-02-20 | Geo Saac Kk | 電磁波センサーを有する記録装置 |
| JP2003014651A (ja) * | 2001-07-05 | 2003-01-15 | Mitsui Eng & Shipbuild Co Ltd | コンクリート構造物検査方法およびその装置 |
| JP2003035772A (ja) * | 2001-07-23 | 2003-02-07 | Osaka Gas Co Ltd | 隠蔽物体探査方法 |
| JP2010286308A (ja) * | 2009-06-10 | 2010-12-24 | Nippon Telegr & Teleph Corp <Ntt> | ミリ波イメージングシステムとその撮像方法 |
-
2013
- 2013-02-21 JP JP2013032412A patent/JP5917428B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS519842U (ja) * | 1974-07-09 | 1976-01-24 | ||
| JPS6131794U (ja) * | 1984-07-30 | 1986-02-26 | 敏 藤田 | 等間隔平行線引き定規 |
| JPS61105954A (ja) * | 1984-10-30 | 1986-05-24 | Toshiba Corp | ハンドスキヤナ入力方式 |
| JPH03146892A (ja) * | 1989-10-31 | 1991-06-21 | Awaa Bureen Kankyo Sekkei Kk | 埋設金属物体の位置表示装置 |
| US4944095A (en) * | 1989-12-20 | 1990-07-31 | James Anglehart | Guiding device for a computer mouse |
| JPH09269310A (ja) * | 1996-04-02 | 1997-10-14 | Kyosan Electric Mfg Co Ltd | センサ移動装置 |
| JPH1048348A (ja) * | 1996-07-31 | 1998-02-20 | Geo Saac Kk | 電磁波センサーを有する記録装置 |
| JP2003014651A (ja) * | 2001-07-05 | 2003-01-15 | Mitsui Eng & Shipbuild Co Ltd | コンクリート構造物検査方法およびその装置 |
| JP2003035772A (ja) * | 2001-07-23 | 2003-02-07 | Osaka Gas Co Ltd | 隠蔽物体探査方法 |
| JP2010286308A (ja) * | 2009-06-10 | 2010-12-24 | Nippon Telegr & Teleph Corp <Ntt> | ミリ波イメージングシステムとその撮像方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017156247A (ja) * | 2016-03-02 | 2017-09-07 | 公益財団法人鉄道総合技術研究所 | 検査架台及び非破壊検査装置 |
| JP2019128225A (ja) * | 2018-01-24 | 2019-08-01 | 応用地質株式会社 | 樹木診断用画像生成装置及び樹木診断用画像生成方法 |
| JP7000175B2 (ja) | 2018-01-24 | 2022-01-19 | 応用地質株式会社 | 樹木診断用画像生成装置及び樹木診断用画像生成方法 |
| CN109061635A (zh) * | 2018-06-08 | 2018-12-21 | 深圳市华讯方舟太赫兹科技有限公司 | 旋转扫描系统 |
| CN113514832A (zh) * | 2021-07-28 | 2021-10-19 | 吉林大学 | 基于毫米波雷达sar成像的金属探伤装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5917428B2 (ja) | 2016-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10444189B2 (en) | Method and apparatus for non-destructive evaluation of materials | |
| US9146214B2 (en) | Leakage magnetic flux flaw inspection method and device | |
| JP5917428B2 (ja) | 電磁波イメージングシステムの計測治具および計測方法 | |
| US20190091811A1 (en) | Method and apparatus for measuring a pipe weld joint | |
| US8345094B2 (en) | System and method for inspecting the interior surface of a pipeline | |
| WO2010029373A3 (en) | Method and apparatus for ultrasonic inspection | |
| US9638648B2 (en) | Flaw detection using transient thermography | |
| CN105004796A (zh) | 用于曲轴检测的超声相控阵试块 | |
| Buyukozturk et al. | Nondestructive testing of materials and structures | |
| KR20140033681A (ko) | 구조물의 거동분석을 통한 구조 건전성 평가 방법 | |
| JP5689035B2 (ja) | かぶりコンクリートの剥落形状計測装置、及び、かぶりコンクリートの剥落形状計測方法 | |
| KR102140170B1 (ko) | 교차 경사형 유도전류를 이용한 비파괴 검사장치용 프로브 및 비파괴 검사장치용 유도코일 제조방법 | |
| US20110057646A1 (en) | Apparatus and method for sensing position of non-orbital movable truck | |
| Hüblová et al. | Experimental measurement of the diameter and cover depth of steel reinforcement using an electromagnetic concrete cover meter | |
| JP2006153783A (ja) | 埋設物探査方法およびその装置 | |
| KR20190123893A (ko) | 관주형 송전탑의 용접부 잔류응력 측정장치 | |
| KR101936367B1 (ko) | 전자기 유도 센서를 활용한 비파괴 피로 검사 장치 및 그 검사 방법 | |
| Maierhofer et al. | Validation of active thermography techniques for the characterization of CFRP structures | |
| JP2004294341A (ja) | パルスリモートフィールド渦電流による探傷方法及びその探傷装置 | |
| KR20170092273A (ko) | 유도 기전력을 이용한 비파괴 검사장치 | |
| Watson et al. | A comparative study of electromagnetic NDE methods and quantum well hall effect sensor imaging for surface-flaw detection in mild steel welds | |
| Trela et al. | Positioning accuracy of an automatic scanning system for GPR measurements on concrete structures | |
| JP5492004B2 (ja) | 渦電流探傷装置、方法、及びプログラム | |
| Giri | Integrated approaches for non-destructive testing of construction materials and structures | |
| EP3207365B1 (en) | System for display of non-destructive testing region |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5917428 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |