JP2014170357A - 車両監視装置 - Google Patents
車両監視装置 Download PDFInfo
- Publication number
- JP2014170357A JP2014170357A JP2013041522A JP2013041522A JP2014170357A JP 2014170357 A JP2014170357 A JP 2014170357A JP 2013041522 A JP2013041522 A JP 2013041522A JP 2013041522 A JP2013041522 A JP 2013041522A JP 2014170357 A JP2014170357 A JP 2014170357A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- camera
- side mirror
- user
- monitoring apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Burglar Alarm Systems (AREA)
- Alarm Systems (AREA)
Abstract
【課題】車両の周囲を精度よく検出することができる車両監視装置を提供する。
【解決手段】車両100に搭載され車両100の周囲を撮像する複数のカメラ104〜107から撮像画像を取得して所定の携帯端末300に送信する車両監視装置200であって、複数のカメラのうち車両のサイドミラー108,109に設置されるカメラ106,107の撮像画像から所定の対象物を検出し、検出された所定の対象物がサイドミラー108,109に設置されるカメラ106,107の撮像範囲から外れないようにサイドミラー108,109の回動角を制御する制御部204を備える。
【選択図】図3
【解決手段】車両100に搭載され車両100の周囲を撮像する複数のカメラ104〜107から撮像画像を取得して所定の携帯端末300に送信する車両監視装置200であって、複数のカメラのうち車両のサイドミラー108,109に設置されるカメラ106,107の撮像画像から所定の対象物を検出し、検出された所定の対象物がサイドミラー108,109に設置されるカメラ106,107の撮像範囲から外れないようにサイドミラー108,109の回動角を制御する制御部204を備える。
【選択図】図3
Description
本発明は車両に設置されたカメラを利用して車両の周囲を監視する車両監視装置に関するものである。
従来のこの種の車両監視装置としては、車両に搭載されたセンサが物体を検出するとカメラが起動して撮像を開始し、撮像した画像の画像処理により車両周囲に異常が発生したと判断した場合には、ユーザの端末装置にカメラの撮像画像を送信していた(例えば下記特許文献1)。
しかしながら、上記従来技術においては、一つのカメラの撮像範囲は限られているため、車両の全周囲を精度よく検出するためには、カメラの数を増やす必要があった。
本発明は、上記従来の課題を解決するもので、車両の周囲を精度よく検出できる車両監視装置を提供することを目的とする。
上記目的を達成するために本発明の車両監視装置は、車両に搭載され前記車両の周囲を撮像する複数のカメラから撮像画像を取得して所定の携帯端末に送信する車両監視装置であって、複数のカメラのうち車両のサイドミラーに設置されるカメラの撮像画像から所定の対象物を検出し、検出された所定の対象物がサイドミラーに設置されるカメラの撮像範囲から外れないようにサイドミラーの回動角を制御する制御部を備える。
本発明の車両監視装置によれば、車両の周囲を精度よく検出することができる。
以下、本発明の実施の形態について図面を参照しながら説明する。なお、以下で説明す
る本発明の実施の形態は、本発明の好ましい一具体例を示すものである。本実施の形態で示される数値、形状、構成要素、構成要素の配置及び接続形態などは、一例であり、本発明を限定する主旨ではない。本発明は、特許請求の範囲だけによって限定される。よって、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素は、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。
る本発明の実施の形態は、本発明の好ましい一具体例を示すものである。本実施の形態で示される数値、形状、構成要素、構成要素の配置及び接続形態などは、一例であり、本発明を限定する主旨ではない。本発明は、特許請求の範囲だけによって限定される。よって、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素は、本発明の課題を達成するのに必ずしも必要ではないが、より好ましい形態を構成するものとして説明される。
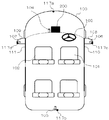
図1は本発明の実施の形態における車両監視装置を搭載した車両を上から見たときの模式図を示している。自動車等の車両100の前方には運転席101と助手席102が設けられ、また、運転席101の前方には、ハンドル103が配置され、このハンドル103の側方には車両監視装置200が装着されている。
また、車両100の右側ドア110には右側サイドミラー108が回動可能に取り付けられ、左側ドア111には左側サイドミラー109が回動可能に取り付けられている。さらに、車両100には、車両100の前方周囲を撮像する前方カメラ104、後方周囲を撮像する後方カメラ105、右側周囲を撮像する右方カメラ106、左側周囲を撮像する左方カメラ107が搭載されている。これらのカメラは、車両周辺画像を車両100に搭載されるディスプレイ(図示せず)上に表示して、駐車時等にユーザを運転支援するための安全運転支援装置のカメラと兼用することができる。また、カメラの数は4つに限定されるものではない。
ここで、右方カメラ106は右側サイドミラー108に取り付けられ、左方カメラ107は左側サイドミラー109に取り付けられている。さらに、車両100には物体の接近を検出する超音波センサ、レーザーレーダなどのセンサ117a〜117dが、車両前方、後方、右側、左側にそれぞれ設置されている。
図2は、車両100の右側サイドミラー108を示す図で、(a)は車両100の右側前方部の上面図で、(b)は右側サイドミラーの拡大図、(c)は右側サイドミラーの回動による右方カメラの撮像範囲の変化を示している。図2に示すように、車両100の前方をY軸方向、右側をX軸方向とする。
右方カメラ106は、図2(b)に示すように車両100の右側周囲を撮像するために、右側サイドミラー108の開放状態においてその光軸がおよそX軸方向を向くように調整されている。同様に、左方カメラ107は、車両100の左側周囲を撮像するために、左側サイドミラー109の開放状態においてその光軸がおよそ−X軸方向を向くように調整されている。
右側サイドミラー108は図2(c)の破線で示すような開放状態と、図2(c)の実線で示すような収納状態の間で回動軸120を中心に回動することができる。右方カメラ106の撮像範囲は、開放状態では撮像範囲A、収納状態では撮像範囲Bとなり、右側サイドミラー108を回動させることで、その撮像範囲を変更することができる。
左側サイドミラー109についても、開放状態と収納状態の間で回動軸を中心に回動することで、左方カメラ107の撮像範囲を同様に変更することができる。
右側サイドミラー108、左側サイドミラー109はモータとギア等の機構により電動で回動させることができるが、通常の自動車に搭載されている機構を利用することができる。そのため、よく知られた機構でありその詳細な説明は省略する。
図3は、車両監視装置200を搭載した車両100およびユーザの携帯端末を含む全体
のシステム構成を説明するための図である。
のシステム構成を説明するための図である。
車両100には、車両100の前方周囲を撮像する前方カメラ104と、後方周囲を撮像する後方カメラ105と、右側周囲を撮像する右方カメラ106と、左側周囲を撮像する左方カメラ107が搭載されている。また、右側サイドミラー108の回動位置を検出する右側サイドミラー位置検出部112と、左側サイドミラー109の回動位置を検出する左側サイドミラー位置検出部113と、右側サイドミラー108を回動させる右側サイドミラー回動部114と、左側サイドミラー109を回動させる左側サイドミラー回動部115と、ドアの開閉等を制御するECU(Electronic Control Unit)116と、センサ117a〜117dが搭載されている。
ユーザが所有する携帯端末300は、携帯電話、スマートフォン、タブレット型PC(Personal Computer)、ノート型PCなどであり、通信部301、アンテナ302、表示部303、スピーカ304、制御部305を備えている。
また、車両監視装置200は、通信部201と、アンテナ202と、記憶部203と、制御部204とを備えている。
通信部201は、アンテナ202から3G等の通信網400を介してユーザが所有する携帯端末300と通信可能に接続して、データの送受信を行う。また、通信部201は、無線LAN(Local Area Network)により通信可能に接続できる無線通信手段を備えていてもよい。
記憶部203は、ハードディスクドライブ、半導体メモリ等の記憶媒体で構成され、前方カメラ104、後方カメラ105、右方カメラ106、左方カメラ107から入力された撮像画像や、ユーザが所有する携帯端末300の電話番号、メールアドレス、ID等を記憶している。
制御部204は、ハードウェア的には、任意のコンピュータのプロセッサ、その他のLSIで実現でき、ソフトウェア的にはメモリにロードされたプログラムなどによって実現される。例えば、システムコントローラ、アプリケーションプロセッサ、メモリおよびメモリ上の車両監視用アプリケーションプログラムの協働により実現される。
制御部204には、例えばロータリエンコーダ等で構成される右側サイドミラー位置検出部112および左側サイドミラー位置検出部113から、各サイドミラーの回動位置のデータが入力される。例えば、右側サイドミラー位置検出部112からは、右側サイドミラー108の開放状態を基準に時計回りに回動位置が何度といったデータが入力される。ここで、右側サイドミラー位置検出部112および左側サイドミラー位置検出部113は、単に各サイドミラーが所定位置にあるか否かを検出して、制御部204に入力するものであってもよい。この場合、例えば所定位置を図2(b)に示した開放状態であるとすると、右側サイドミラー位置検出部112は右側サイドミラー108が開放状態にあるか否かのデータを制御部204に出力する。
制御部204は、入力された回動位置のデータに基づいて、モータとギア等の機構により構成される右側サイドミラー回動部114、左側サイドミラー回動部115を制御して右側サイドミラー108、左側サイドミラー109を所定位置にセットする。
また、制御部204は、前方カメラ104、後方カメラ105、右方カメラ106、左方カメラ107からの撮像画像を入力して、通信部201から携帯端末300に撮像画像を送信する。
次に、車両監視装置200の動作について、図4、5のフローチャートを用いて説明する。
まず、制御部204は監視機能を有効にするON信号が入力されたかを検出する(ステップS401)。例えば、ユーザが降車して車両100のドアを施錠後に、監視機能を有効にするON信号がECU116から自動で入力される。また、ユーザが携帯端末300を用いて無線LANにより通信部201と接続し、監視機能を有効にするON信号を送信するようにしてもよい。制御部204は監視機能を有効にするON信号を受信した場合(ステップS401でYes)には、ステップS402に処理を進め、ON信号を受信していない場合には処理を戻してON信号の受信を待つ。
ステップS402では、制御部204は前方カメラ104、後方カメラ105、右方カメラ106と、左方カメラ107を起動して撮像画像を入力し、記憶部203に保存する。その後、各カメラを省電力のため待機モードにする。そして、ユーザが車両100から十分離れたかを検出し(ステップS403)、センサ117a〜117dを起動して監視モードに入る(ステップS404)。
ここで、ユーザが車両100の近くに居る場合に、誤ってユーザ自身を検出してしまうことがない様に、ユーザが車両100から十分離れてから、実際に監視を開始することとなる。監視モードとは、センサ117a〜117dを起動して実際に監視を開始した状態をいう。
例えば、車両100のドアを施錠/開錠するための無線信号の送受信機能を備えた鍵をユーザが保有しており、降車してECU116により車両100が施錠され、鍵を保有するユーザが車両100から離れて無線信号の送受信ができなくなったことを検出したECU116からの信号により、監視モードに入る。
次に、ステップS405では、制御部204はステップS402で取得して、記憶部203に保存した各カメラの撮像画像を、通信部201を介してユーザの携帯端末300に送信する。このとき撮像画像を送信する通信手段としては、通信網400を利用した移動体通信であっても、ユーザは車両100の近くに居るため無線LANにより通信網400を介さずに接続して送信することもできる。通信網400を利用した移動体通信で送信する場合には、記憶部203に記憶されているに電話番号、メールアドレス等により、ユーザの携帯端末300を特定できる。
ユーザは、車両100に乗車中に、保有する携帯端末300を車載機器と無線LANで通信接続し、携帯端末300に保存されている音楽や画像データを再生している場合がある。この場合、ユーザが降車しても車両100の近くに居れば、通信接続を維持したまま、撮像画像を送ることができる。
また、ステップS405では、前方カメラ104、後方カメラ105、右方カメラ106と、左方カメラ107からの4枚の撮像画像を送信しても良いが、適宜加工して送信することもできる。ステップS402で取得され、記憶部203に保存した撮像画像は、車両監視装置200が監視モードに入る前の画像であるため、ユーザは車両100の近くに居て、いずれかのカメラの撮像画像に写っていることになる。ステップS405により、携帯端末300で受信された撮像画像は、ユーザにより携帯端末300の表示部303で表示される。その撮像画像を見ることにより、ユーザは車両監視装置200が起動していることを確認できると共に、手動で車両監視装置200を起動する場合にはその起動し忘れがないことを、後に携帯端末300を見るだけで確認できる。
次に、ステップS406において、制御部204はセンサ117a〜117dが物体の接近を検出することにより、異常を検出する。異常を検出した場合には(ステップS406でYes)、右側サイドミラー回動部114および左側サイドミラー回動部115を制御して右側サイドミラー108、左側サイドミラー109を開放状態にセットする(ステップS407)。異常を検出しなかった場合には(ステップS406でNo)、処理を戻して異常の検出を待つ。
ステップS408では、各カメラが待機モード中であれば起動させて撮像画像を取得し、制御部204は取得した撮像画像を画像処理することにより、所定の対象物として動く人物を検出し、対象物が写っているカメラを特定する(ステップS409)。対象物が写っているカメラが特定できた場合には(ステップS410でYes)、処理をステップS412に移し、対象物がどのカメラの撮像画像からも検出できず特定できなかった場合には(ステップS410でNo)、右側サイドミラー回動部114および左側サイドミラー回動部115を制御して右側サイドミラー108、左側サイドミラー109を収納状態に戻して、各カメラを省電力のため待機モードに戻す(ステップS411)。そして、処理をステップS406に戻して異常検出を待つ。
ここで、ステップS406で異常検出したが、ステップS409では動く人物を検出できない場合としては、センサ117a〜117dの誤検出、犬等の人物以外の検出、車両100に人物が接近したが、直ぐに離れた場合などが考えられる。
次に、図5のステップS412では、ユーザが車両監視装置200の監視機能を無効にしたかを検出する。例えば、ユーザが車両100のドアを開錠後に、監視機能を無効にするOFF信号がECU116から自動で制御部204に入力される。あるいは、ステップS401と同様に、ユーザが携帯端末300を用いて無線LANにより通信部201と接続して、監視機能を無効にするOFF信号を送信してもよい。制御部204はそのOFF信号を検出すると(ステップS412でYes)、監視モードを解除して処理を終了する。OFF信号を検出しなかった場合には(ステップS412でNo)、処理をステップS413に移す。
ステップS409において、カメラの撮像画像から対象物を検出した場合、その対象物がユーザ本人である可能性があるため、ステップS413の撮像画像の送信処理の前に、ステップS412の処理を入れている。
ステップS413では、ステップS409で特定したカメラの撮像画像を、携帯端末300に送信する。ユーザは、携帯端末300で受信した撮像画像から、車両100にいたずらや盗難の可能性があると判断すると、警察・警備会社に連絡することができる。
次に、ステップS414では、ステップS409で特定したカメラが右方カメラ106かを判断する。右方カメラであった場合には(ステップS414でYes)、制御部204は対象物が右方カメラ106の撮像範囲から外れないように、右側サイドミラー回動部114により右側サイドミラー108の回動角を制御する。例えば、対象物が撮像画像の中央にくるように右側サイドミラー回動部114を制御して右側サイドミラー108を回動させる。ステップS414で右方カメラ106ではなかった場合には(No)、ステップS418に処理を移す。
ステップS415で右側サイドミラー108が回動すると、その回動時の音により車両100に近づいた人物は誰か居るのではないかという不安を感じて逃走し、いたずらや盗難を未然に防止できるという効果も期待できる。
次に、ステップS416において、制御部204は、対象物が右方カメラ106の撮影範囲内に居るかを、その撮像画像の画像処理により判断する。対象物が撮像画像内に居る場合には(ステップS416でYes)、その撮像画像を携帯端末300に送信し、対象物が撮像画像内に居ない場合には(ステップS416でNo)、処理をステップS408に戻して、別のカメラの撮像画像に対象物が居るかを検出する。
ステップS418では、ステップS409で特定したカメラが左方カメラ107かを判断する。ステップS419からS421までの処理については、右方カメラ106の場合のステップS415からS417の処理と同様であるため、その説明は割愛する。
ステップS418で、左方カメラ107ではなかった場合には(No)、ステップS422に処理を移す。この場合、対象物を撮像しているカメラは前方カメラ104または後方カメラ105であって、回動しないため、右方カメラ106の場合のステップS415に対応する処理は無い。ステップS422、S423は右方カメラ106の場合のステップS416、S417の処理と同様であるため、その説明は割愛する。
以上説明したように、本発明の車両監視装置は、車両に搭載され車両の周囲を撮像する複数のカメラから撮像画像を取得して所定の携帯端末に送信する車両監視装置であって、複数のカメラのうち車両のサイドミラーに設置されるカメラの撮像画像から所定の対象物を検出し、検出された所定の対象物がサイドミラーに設置されるカメラの撮像範囲から外れないようにサイドミラーの回動角を制御する制御部を備える。それにより、サイドミラーに設置されるカメラの撮像可能な範囲はサイドミラーの回動角を変えることにより広くなるため、車両の周囲を精度よく検出することができる。
なお、本発明の車両監視装置は、ナビゲーション、安全運転支援等の機能を有する車載機器の一機能として車載機器に内蔵することもできる。
本発明の車両監視装置は、車両の周囲を精度よく検出することができるという効果を有し、自動車などの車両に搭載して用いられる盗難警報装置や車載機器等として有用である。
100 車両
104 前方カメラ
105 後方カメラ
106 右方カメラ
107 左方カメラ
108 右側サイドミラー
109 左側サイドミラー
112 右側サイドミラー位置検出部
113 左側サイドミラー位置検出部
114 右側サイドミラー回動部
115 左側サイドミラー回動部
116 ECU
117a〜117d センサ
120 回動軸
200 車両監視装置
201、301 通信部
202、302 アンテナ
203 記憶部
204、305 制御部
300 携帯端末
400 通信網
104 前方カメラ
105 後方カメラ
106 右方カメラ
107 左方カメラ
108 右側サイドミラー
109 左側サイドミラー
112 右側サイドミラー位置検出部
113 左側サイドミラー位置検出部
114 右側サイドミラー回動部
115 左側サイドミラー回動部
116 ECU
117a〜117d センサ
120 回動軸
200 車両監視装置
201、301 通信部
202、302 アンテナ
203 記憶部
204、305 制御部
300 携帯端末
400 通信網
Claims (1)
- 車両に搭載され前記車両の周囲を撮像する複数のカメラから撮像画像を取得して所定の携帯端末に送信する車両監視装置であって、前記複数のカメラのうち車両のサイドミラーに設置されるカメラの撮像画像から所定の対象物を検出し、検出された前記所定の対象物が前記サイドミラーに設置されるカメラの撮像範囲から外れないように前記サイドミラーの回動角を制御する制御部を備える車両監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013041522A JP2014170357A (ja) | 2013-03-04 | 2013-03-04 | 車両監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013041522A JP2014170357A (ja) | 2013-03-04 | 2013-03-04 | 車両監視装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014170357A true JP2014170357A (ja) | 2014-09-18 |
Family
ID=51692715
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013041522A Pending JP2014170357A (ja) | 2013-03-04 | 2013-03-04 | 車両監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014170357A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020136715A (ja) * | 2019-02-13 | 2020-08-31 | 株式会社Jvcケンウッド | 車両用映像制御装置、車両用映像システム、映像制御方法、及びプログラム |
| WO2025134210A1 (ja) * | 2023-12-18 | 2025-06-26 | パイオニア株式会社 | 監視装置、監視方法、および監視プログラム |
-
2013
- 2013-03-04 JP JP2013041522A patent/JP2014170357A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020136715A (ja) * | 2019-02-13 | 2020-08-31 | 株式会社Jvcケンウッド | 車両用映像制御装置、車両用映像システム、映像制御方法、及びプログラム |
| CN113965666A (zh) * | 2019-02-13 | 2022-01-21 | Jvc建伍株式会社 | 车辆用影像控制装置、车辆用影像系统、影像控制方法和程序 |
| EP3926948A4 (en) * | 2019-02-13 | 2022-04-06 | JVCKenwood Corporation | VIDEO CONTROL DEVICE FOR VEHICLES, VIDEO SYSTEM FOR VEHICLES, VIDEO CONTROL METHOD AND PROGRAM |
| US11940794B2 (en) | 2019-02-13 | 2024-03-26 | Jvckenwood Corporation | Vehicle video control apparatus, vehicle video system, video control method, and program |
| WO2025134210A1 (ja) * | 2023-12-18 | 2025-06-26 | パイオニア株式会社 | 監視装置、監視方法、および監視プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6482147B2 (ja) | 報知システム | |
| JP6581987B2 (ja) | 車両用のシステムと、車両の付近のオブジェクトの検出に基づいて応答をアクティブ化する方法 | |
| CN105459954B (zh) | 一种汽车报警方法及装置 | |
| US11926267B2 (en) | Camera arrangement, method, device and computer-readable storage medium with instructions for controlling an assistance system | |
| KR101533421B1 (ko) | 금고 원격 제어 시스템과 방법 및 그 방법을 컴퓨터로 실행시키기 위한 프로그램 코드를 저장한 기록매체 | |
| JP2020149088A (ja) | 車両防犯装置 | |
| JP2010257249A (ja) | 車載防犯装置 | |
| JP6655318B2 (ja) | 車両防犯システム | |
| JP2013036251A (ja) | 車載カメラと携帯情報端末機による車両開閉体操作装置及びシステム並びにその制御方法 | |
| JP2013041489A (ja) | 車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム | |
| JP2014203317A (ja) | 携帯型通信機器 | |
| KR20230052719A (ko) | 자율 주행 차량, 그를 원격 제어하는 시스템 및 그 방법 | |
| JP2006182234A (ja) | 車載カメラシステム、撮影方法及びドアミラー | |
| JP2014170357A (ja) | 車両監視装置 | |
| JP2020132073A (ja) | 車両用防犯システム及び車両用防犯装置 | |
| JP7051369B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP3950393B2 (ja) | 車両警報システム | |
| JP7112191B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2005167943A (ja) | 不審者撮像装置 | |
| CN116095469A (zh) | 车辆监控的方法、系统、设备组和存储介质 | |
| JP7545199B2 (ja) | 制御装置、車載装置及び制御方法 | |
| JP7103773B2 (ja) | 画像処理装置及び画像処理方法 | |
| CN104057920B (zh) | 一种汽车无线防盗装置及其使用方法 | |
| JP2020097305A (ja) | 制御装置、プログラム、及び制御システム | |
| JP2003304530A (ja) | 監視装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20150225 |