[第1実施形態]
本発明における第1実施形態の電位検出装置について図面を参照して以下に説明するが、本発明の趣旨を越えない限り、何ら本実施形態に限定されるものではない。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化乃至省略する。
本実施形態の概略を以下に説明する。発明者は、コンパクトに構成でき、対象部材の一例である感光体の表面電位を精度良く検出する電位検出装置を提供するため、ピエゾ抵抗体を備えたカンチレバーを応用することを知見した。
近年、ピエゾ内蔵型カンチレバー、もしくは、自己検知カンチレバーとよばれるカンチレバーが実用化されてきている。これは、表面にピエゾ抵抗体が形成されたカンチレバーを用い、そのピエゾ抵抗体の抵抗値の変動を検出することによってカンチレバーのたわみ量を検出するものである。この方式のカンチレバーであれば、光学系を必要としない為、コンパクトな構成にすることが可能である。また、光テコ方式のように、漏れ光が感光体に届くことを考慮する必要も無くなる。
さらに重要なことは、カンチレバーの寸法はマイクロスケールであり、その他の配線および設置機構を含めても、非常にコンパクトに設計することができる。このため、センシング部を感光体の長手方向に複数配置できることである。したがって、出力した画像パターン、もしくは、材料の偏りに起因する長手方向の光疲労のムラを検知することができる。
本実施形態は、このピエゾ内蔵型カンチレバーを用い、正確に感光体表面の光疲労を検知する電位検出装置を提案するものである。これにより、画像形成装置では、より精度の良い画像濃度の制御を行うことが可能となる。また、本実施形態は、より適切なタイミングで感光体を交換する電位検出装置を提案するものでもある。これにより、より安定した画像濃度を出力できるようになる。
本実施形態の電位検出装置を備える画像形成装置の概略構成について図1を参照して説明する。本実施形態の画像形成装置1において、本体筐体内に、時計周りに回転駆動される像担持体としての感光体20が収納されている。そして、感光体20の周囲に、帯電部30と、露光部40と、本実施形態の電位検出装置10と、現像部50と、転写部60と、クリーニングブラシ70と、ブレード80と、感光体除電部90が配置されている。
画像形成装置1は、複数枚の記録紙を収納する給紙カセットを備えている。給紙カセット内の記録紙は、給紙ローラによりレジストローラ対へ1枚ずつ送り出される。そして、記録紙は、レジストローラ対によりタイミング調整された後、転写部60と感光体20の間に送り出される。
画像形成装置1は、感光体20を時計周りに回転駆動して、感光体20を帯電部30で一様に帯電する。その後、露光部40により画像データで変調されたレーザーを照射して感光体20に静電潜像を形成し、静電潜像の形成された感光体20に現像部50でトナーを付着させて現像する。
画像形成装置1は、現像部50でトナーを付着してトナー画像を形成した感光体20を、転写部60で感光体20と転写部60との間に搬送されてきた記録紙に転写させ、トナー画像の転写された記録紙を定着部に搬送する。
定着部は、内蔵ヒータにより所定の定着温度に加熱される定着ローラと、定着ローラに所定圧力で押圧される加圧ローラとを備え、転写部60から搬送されてきた記録紙を加熱、加圧して、記録紙上のトナー画像を記録紙に定着させた後、排紙トレー上に排出する。
一方、画像形成装置1は、転写部60でトナー画像を記録紙に転写した感光体20をさらに回転して、クリーニングブラシ70で感光体表面に残留するトナーをブレード80により除去する。その後、画像形成装置1は感光体除電部90で除電する。
画像形成装置1は、感光体除電部90で除電した感光体20を帯電部30で一様に帯電させた後、上記同様に、次の画像形成を行う。なお、クリーニングブラシ70は、ブレード80で感光体20上の残留トナーを掻き落とすものに限るものではなく、例えばファーブラシで感光体20上の残留トナーを掻き落とすものであってもよい。
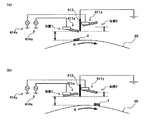
次に、本実施形態の電位検出装置を適用可能な他の画像形成装置の概略構成について図2を参照して説明する。図2(a)はタンデム型のフルカラー画像形成装置100の概略構成を、図2(b)は、リボルバタイプのフルカラー画像形成装置200の概略構成を示したものである。なお、上述した本実施形態の画像形成装置1と同様の構成については説明を省略する。
まず、タンデム型のフルカラー画像形成装置100の概略構成について図2(a)を参照して説明する。画像形成装置100においては、不図示の本体筐体内に、時計周りに回転駆動される像担持体102がC(シアン)、M(マゼンタ)、Y(イエロー)、K(ブラック)の各色分、中間転写部106上にタンデム配置されている。そして、中間転写部106に転写されたトナー像が転写部107において記録紙にカラー画像が転写される。
次に、リボルバタイプのフルカラー画像形成装置200の概略構成について図2(b)を参照して説明する。リボルバタイプのフルカラー画像形成装置200は、現像装置の動作を切り替えることによって1つの像担持体上に順次複数色のトナーを現像して構成をとるものである。
つまり、図示のように、像担持体202上に、シアンのトナー像を現像する現像装置205Cと、マゼンタのトナー像を現像する現像装置205Mと、イエローのトナー像を現像する現像装置205Yと、ブラックのトナー像を現像する現像装置205Kがリボルバ状に配置されている。
上述した本実施形態の画像形成装置に搭載される部材の1つとしての像担持体について説明する。本発明に用いられる像担持体には電子写真感光体を用いることができる。電子写真感光体はトナー画像を記録紙または中間転写体に転写するため、トナーに対して大きな付着力を持つことは好ましくない。ゆえに本発明を好適に用いることができる。電子写真感光体としては、導電性支持体上に少なくとも中間層、感光層を有していれば、上記以外のその他の層が形成されていてもよい。
次に、本実施形態の電位検出装置10の概略構成について図1及び図3を参照して説明する。図3(a)に示すように、本実施形態の電位検出装置10は、感光体20の表面から略垂直方向に所定距離(以下『ギャップ』とする)を空けて配置され、ピエゾ内蔵型カンチレバーとして、カンチレバー11と駆動機構であるピエゾ12とから構成される。本実施形態の電位検出装置10には、上述のようにピエゾ内蔵型カンチレバーを用いる。図1に示すように、電位検出装置10を露光部40の下流側に設置することで、作像プロセスに悪影響を及ぼさずに感光体の表面状態を検知できる。
また、図3(b)に示すように本実施形態の電位検出装置10を感光体20の長手方向に沿って保持部材13等で保持し、所定の間隔で設置することで、感光体20の長手方向の電位ムラを検知することが可能である。つまり、感光体20の長手方向の電位ムラを検出する間隔は、この配置の間隔と関係がある。この所定の間隔を狭めるか、拡げるかを決定することで、電位検出装置10のトータル設置数を制御することができる。また、所定の間隔を拡げると、電位ムラの検出精度は多少落ちるものの、ピエゾ内蔵型カンチレバーの個数が減るため、コストを低減することができる。
ピエゾ内蔵型カンチレバーを用いて行う感光体表面での鏡像力検出は、基本的に、原子間力顕微鏡を用いた手法と同じである。ここで、具体的な測定行為について説明する。まず、ピエゾ内蔵型カンチレバーと感光体の表面との間に一定のギャップを設けて設置する。こうすることで、感光体の表面電荷と感光体の表面電位によってカンチレバーに誘起される鏡像電荷とのクーロン力が発生する。このとき、ピエゾ内蔵型カンチレバーの先端が感光体側に引き寄せられる。このときのピエゾ内蔵型カンチレバーのたわみ量をモニターすることで、感光体の表面の電位を測定することができる。
また、ピエゾ内蔵型カンチレバーのバネ定数は数〜数十N/mに限られている為、検出対象の表面電位に対して適切なギャップを設定することが重要である。図4に、感光体の表面電位とカンチレバーに作用する力の関係を示す。感光体の表面電位は、数十から数百Vである。例えばSIIナノテクノロジー社(現日立ハイテクサイエンス)製の自己検知カンチレバー≪幅50μm・長さ400μm≫のように、4N/mのバネ定数のカンチレバーを用いる場合、検出可能な力範囲は数〜数百nNであるため、感光体表面とカンチレバーとのギャップは100〜300μmに設定するのが良い。
本実施形態の電位検出装置10を構成するピエゾ内蔵型カンチレバーについては、例えばSPMプローブを用いる。SPMプローブの概略構成と作用について図16を参照して説明する。
図16は、自己検知型SPMプローブ700の平面図である。図16において、自己検知型SPMプローブ700は、先端に探針712を設けたレバー部と、支持部とを2つの屈曲部によって連結された構成となっている。2つの屈曲部上には、それぞれピエゾ抵抗体722、724が形成されている。
ピエゾ抵抗体722、724は、特に屈曲部上において、レバー部の一部から支持部の一部に至って形成されている。さらに、ピエゾ抵抗体722、724上および支持部上には、絶縁層が形成されている。なお、図11においては、図を簡略化して理解を容易にするため、絶縁層を図示していない。また、これら2つの屈曲部とピエゾ抵抗体722、724は、カンチレバー702の長手方向に探針712を通過する線を中心軸として、両対称に形成される。
絶縁層上においては、配線となる導電層726、728が、ピエゾ抵抗体722、724のレバー部に位置する部分から屈曲部とピエゾ抵抗体722、724の支持部に位置する部分とを介し、カンチレバーの支持部においてピエゾ抵抗体722、724の形成されていない部分にまでそれぞれ形成されている。
導電層726のレバー部に位置する一端と、下層のピエゾ抵抗体722とは、メタルコンタクト部742において電気的に接続される。同様に、導電層728のレバー部に位置する一端と、下層のピエゾ抵抗体724とは、メタルコンタクト部744において電気的に接続される。
さらに、絶縁層上において、配線となる導電層732、734が、ピエゾ抵抗体722、724の支持部に位置する部分から、支持部においてピエゾ抵抗体722、724の形成されていない部分に至ってそれぞれ形成されている。
導電層732のピエゾ抵抗体722に位置する一端と、下層のピエゾ抵抗体722とは、メタルコンタクト部736において電気的に接続される。同様に、導電層734のピエゾ抵抗体724に位置する一端と、下層のピエゾ抵抗体724とは、メタルコンタクト部738において電気的に接続される。
このように、カンチレバー702のレバー部と支持部とが2つの屈曲部によって連結され、ピエゾ抵抗体を、それら屈曲部上にレバー部から支持部にわたって直線状に形成しているので、屈曲部をピエゾ抵抗体形成領域として有効に利用でき、細く形成することが可能となる。そのため、2つのピエゾ抵抗体間において、カンチレバー702の捩れにより生じる両屈曲部の変位差を示す抵抗値差が、顕著にかつ正確に現れる。
さらに、それぞれのピエゾ抵抗体の抵抗値を読み出すために、ピエゾ抵抗体の両端からピエゾ抵抗体にそれぞれ電気的に接続したメタルコンタクト部を形成して、両メタルコンタクト部から、カンチレバー702の支持部におけるピエゾ抵抗体の形成されていない部分へと、配線となる導電層が、下層に酸化層を配した状態で導かれている。
すなわち、屈曲部のピエゾ抵抗体の抵抗値変化を、支持部上に導かれた2つの導電層から読み出すことができ、それら抵抗値変化からカンチレバー702のたわみ量および反り量を検出することができる。このため、信号処理部は、抵抗値とたわみ量や反り量の参照データを照合する。
なお、この場合の信号処理部は、ピエゾ抵抗体の抵抗値と、たわみ量や反り量との対応関係を予め求めておき、入力とされる抵抗値から、たわみ量や反り量を求めることができる。
次に、本実施形態の電位検出装置10により表面電位ムラを検出した場合は、その結果を基に、露光量を調整することで、画像濃度ムラを一定に保つことができる。例えば、図5に示すように、局所的に光疲労が発生して、露光後電位が高い領域が存在する場合は、その領域のみ、光量を強くし、狙いの現像ポテンシャルを保つことで、画像濃度ムラの発生を抑えることができる。
なお、本実施形態の電位検出装置10は、上述した駆動機構としてのピエゾ12により動的にバネ定数の高いカンチレバーを発振させて、その振幅変化、もしくは、周波数変化を検出することで、感光体の表面電位を検出することができる。カンチレバーの発振させるためのピエゾ12を設けることためのコストアップは発生するが、表面電位の検出感度を上げることが可能である。
発振可能なピエゾ内蔵型カンチレバーとしては、自己検知型カンチレバーを用いることができる。カンチレバーの発振方法としては、一般的な原子間力顕微鏡の手法と同じであり、カンチレバー11の根元に設置したピエゾ12を周期的に伸び縮みさせることで、カンチレバーを発振させる。
これに対し、図3(c)に示すように、ピエゾ内蔵型カンチレバーとして、比較的、バネ定数の低い、ピエゾ12aを内蔵したピエゾ内蔵カンチレバー11aを用い、誘導電荷によるカンチレバーの反りを静的に検出する構成をとることとしてもよい。これにより、駆動機構としてのピエゾ12を別途設けることによるコストアップを抑えることが可能である。
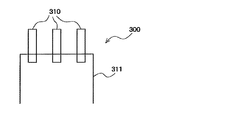
また、図6に示すように、ピエゾ内蔵型カンチレバーとして、アレイ構造のものを用いるのも有効である。ここでは、アレイ構造の電位検出装置300として、ピエゾ内蔵型カンチレバー310を3つ並べてアレイ構造とした構成を採用している。
このようなアレイ構造とすることで、使用中にカンチレバーの破損、性能劣化が発生した際にも、他のカンチレバーを使用することで、継続して感光体の表面電位をモニターし続けることができる。アレイを構成するカンチレバーの数は、当然、多い方が破損等のリスク許容度が大きくなる。一方、カンチレバーの製造コストを抑える観点から3〜10本程度のカンチレバーで構成するのが好適である。
次に、本実施形態の電位検出装置10について図7及び図8を参照して具体的に説明する。本発明の発明者は、検知対象の部材と距離が異なる2つの位置にピエゾ内蔵型カンチレバーを配置することが有効であることを知見した。
感光体等の検知の対象部材は、装置が動作中は回転や移動しているため、常に、振れが発生する。ピエゾ内蔵型カンチレバーで検知する鏡像力検出は、対象部材との距離に依存するため、振れによって距離変動が発生すると、検出する鏡像力と、鏡像力から算出する電位値も変動することになる。例えば、感光体であれば、10〜50μm程度の振れは発生するが、この距離の変動が鏡像力の検出値に直接に影響することになる。ここで、感光体等の対象部材上の電荷により、ピエゾ内蔵型のカンチレバーに反対極性の電荷が誘起され、対象部材とピエゾ内蔵型のカンチレバーとの間に作用するクーロン力が生じる。このクーロン力が鏡像力のことであり、対象部材上の電荷の量によりクーロン力が変化する。このクーロン力の作用により、ピエゾ内蔵型のカンチレバーは対象部材側へ引っ張られるように変形する。この変形が、たわみ量や反り量として検知される。
そこで、本実施形態の電位検出装置10は、図7に示すように、検知の対象部材としての感光体20に対して略垂直方向にそれぞれ異なる距離を空けて、位置1と位置2とに2つのピエゾ内蔵型カンチレバーを配置している。さらに、所定の保持部材14により2つのピエゾ内蔵型カンチレバーを相互に一定の距離を空けて保持している。なお、保持部材としては、2つのピエゾ内蔵型カンチレバーを相互に一定の距離を空けて保持できる構造であれば、図7に記載の構造に限定されない。また、2つのピエゾ内蔵型カンチレバーの固定方法としては、ネジ等の固定部材で固定してもよく、接着剤等により固定してもよい。
ここでは、例えば感光体20から約200μm空けてピエゾ12xを備えたカンチレバー11xが配置され、ピエゾ12yを備えたカンチレバー11yがピエゾ内蔵型カンチレバー11xとの間に一定の距離、約100μmを空けて配置されている。
このように、対象部材と距離の異なる2つの位置にカンチレバーを配置し、かつ、これらのカンチレバーを構成し、装置の動作中も、カンチレバー間の距離は変動しないように配置して鏡像力を検出することで上述の感光体の振れに対応することができる。いずれのカンチレバーとも、感光体20との距離は装置の動作中に変動し得るが、カンチレバー間の距離は常に100μmと固定である。
本実施形態において、上述のようにカンチレバー間の距離を常に100μmと固定することにより得られる利点について、図8を参照して説明する。図8は、横軸に感光体20の表面からのカンチレバーの距離X[μm]をとり、縦軸にカンチレバーに働く鏡像力F[nN]をとって、両者の相関をみるグラフである。そして、感光体20の表面電位が100Vの場合に得られる数値を『◆』で示し、感光体20の表面電位が200Vの場合に得られる数値を『□』で示し、感光体20の表面電位が500Vの場合に得られる数値を『×』で示している。
また、図8(a)は、感光体20に振れが全く発生しないとした理想的な状態を示したグラフであり、この場合は、各カンチレバー単体で感光体20の表面電位を検出することができる。一方、図8(b)は、感光体20に振れが発生して、カンチレバーと感光体20との間隔が上記の理想的な状態より狭くなった状態を示している。また、図8(c)は、感光体20に振れが発生して、カンチレバーと感光体20との間隔が上記の理想的な状態より広くなった状態を示している。
ここで、検出値である鏡像力Fに対して、感光体の表面電位V、感光体と感光体側のカンチレバーの距離Xとした場合、V=k×F/Xが成立する。なお、kは予め決定可能な比例定数である。Xは装置の動作中に変動するため未知数となり、カンチレバーと感光体間の距離が1水準の状態では、距離Xと感光体の表面電位Vの2つの未知数は求めることができない。
一方、上記のように常に、感光体20との距離を2水準に変えて、さらにカンチレバー同士の距離を100μmと固定にし、鏡像力を検出できれば、V=k×F/X、V=k×F/(X+100)の2式から、2つの未知数VとXを求めることができる。つまり、2つのカンチレバーが感光体20に対しての距離を異ならせ、さらに、2つのカンチレバー間の距離を固定することで、2つの未知数を求めることができる。
カンチレバー間の距離は、対象部材の変動よりも大きく、かつ、対象部材から離れている、例えば本実施形態では位置2のカンチレバー11yでも鏡像力が検知できるように設定することが望ましい。本実施形態の一例では、100μmとしたが、具体的には、距離50〜100μmに設定するのが好適である。
[第2実施形態]
次に、本発明における第2実施形態の電位検出装置について図面を参照して説明する。なお、第1実施形態と重複する内容については説明を省略する。
まず、本実施形態と第1実施形態との違いについて説明する。第1実施形態の電位検出装置によれば、ピエゾ内蔵型カンチレバーを用い、正確に感光体表面の光疲労を検知する等により、より精度の良い画像濃度の制御を行うことが可能となる。
一方、電子写真方式の画像形成装置においては、地汚れやクリーニング不良等、微量かつ点在する異常トナーが発生するような不具合が見られる。クリーニング不良等を防ぐため、異常トナーを検出する必要があるが、トナー電荷によって発生する電位は感光体等の部材上の電位よりもさらに小さいため、これを解決する構成を第1実施形態に加える必要がある。そこで、本発明者は、電圧印加手段により、ピエゾ内蔵型カンチレバーに所定の電圧を印加することで電位検知精度を向上させて、トナーの有無を検出する本実施形態の構成を知見した。
さらに、本実施形態においては、印加する電圧を所定の交流電圧とし、カンチレバーへの最大印加電圧、つまりピークツーピーク電圧を上げて、電位検出精度を上げることとした。また、対象部材の線速に応じて電圧周波数を変える制御を行う。これにより、カンチレバー下をトナーが通過する際に、その交流周期が通過時間以下になるような、交流電圧をカンチレバーに印加するようにした。本実施形態によれば、カンチレバーに電圧を印加することで、電位計測時のカンチレバー変位が増幅されて、トナー電位レベルの微小電位が計測できるので、部材表面上のトナー電位とトナー存在の有無を正確に検出可能となり、画像形成装置が動作中の異常発生によるユーザー負荷を低減することが可能となる。ここで、ピークツーピーク電圧とは、交流電圧を印加した際の最大電圧と最小電圧の差分である。
なお、本実施形態においては、専らトナーを検知する実施態様について説明するが、本発明はこれに限定されず、対象部材の電位検出の精度を高めることが必要なシーンにおいて適用することができる。
本実施形態の電位検出装置を備えた画像形成装置400の概略構成について図9を参照して説明する。図9に示すように、本実施形態においては、電位検出装置としての、ピエゾ内蔵型カンチレバーによるセンシング部410を、ブレード80の下流側に設置する。また、図3(b)で示すように、第1実施形態と同様に、感光体の長手方向に対して平行に隙間無くカンチレバーを設けることで、感光体の長手方向全域でのクリーニング不良を検知することができる。
ピエゾ内蔵型カンチレバーを用いての電位検出は、電圧印加により誘起されたカンチレバーの電荷と、感光体表面およびトナーの電荷との間に作用するクーロン力を、カンチレバーのたわみ、そり量として検出することによって行う。具体的には、ピエゾ内蔵型カンチレバー411には、電圧印加手段414により、ピークツーピーク電圧1〜500V、周波数1〜100kHzの交流電圧を印加し、ピーク電圧時点でのカンチレバーのたわみ、そり量を検出することで、電位を推定する。
カンチレバー近傍に電荷が存在すれば、その鏡像力を検出することで、電位を検出することも可能だが、本実施形態のように、トナーのように微小の電位を検出する場合には、カンチレバーに電圧を印加して、カンチレバーの変形量を大きくすることが有効である。このように、交流電圧をピエゾ内蔵型カンチレバーに印加するのは、カンチレバーの変形量を大きくし、検出SN比を上げることである。この結果、感光体等の対象部材上の電荷によるものより大きな電荷がピエゾ内蔵型カンチレバーに存在することになり、対象部材上の電荷とピエゾ内蔵型カンチレバー上の電荷による鏡像力が増加する。
カンチレバーに直流電圧を印加することによっても、検出するカンチレバーの変形量を増幅できる。しかし、交流電圧の方が、電圧印加によるカンチレバーへの負荷は小さいため、長期間、安定して電圧を印加し続けるためには、交流電圧を用いるのが良い。この場合、重要なのはカンチレバー変位のピークツーピーク信号なので、得られた変位信号にハイパスフィルターをかければよい。なお、交流電圧の方が直流電圧より電圧印加時の安定性が良いため、本実施形態では交流電圧を例示しているが、直流電圧であっても良いことは言うまでもない。
さらに、カンチレバーに印加する電圧、周波数のより具体的な値は、カンチレバー、感光体間のギャップ、感光体線速等で最適化すべきであるが、近年、画像形成装置に係る各部の高速化が進んでいるため、この点を反映させて周波数を設定しなければならない。
例えば、現状、製品化されている画像形成装置であれば、感光体線速は、100mm/sから1000mm/sである。線速1000mm/sで駆動している感光体上で、1ドットレベル程度、すなわち、約30um角の大きさのトナー層を検出するためには、30usecの時間幅で2、3周期の交流電圧を印加しなければならない。このため、周波数を約100kHzに設定する必要がある。
ここで、本実施形態のように2つのカンチレバーに電圧を印加する場合に、カンチレバー相互に作用する電界の影響を考慮した構成が必要である。これについて図10を参照して説明する。
つまり、対象部材から距離の異なる2つのカンチレバー間で相互に電界が作用し、それぞれのカンチレバーの変形量が変わることにより検知精度に与える影響を考慮しなければならない。例えば、位置1のカンチレバー411xに印加した電圧により電界が発生し、その電界で位置2のカンチレバー411yが変形すると、感光体や感光体上のトナーの電位によるカンチレバーの変形量の検出精度が下がる。
そこで、図10に示すように2つのカンチレバーの間に、電界を遮断する電界遮断手段としてのシート413を配置することで、それぞれのカンチレバーから発生する電界を遮蔽する。これにより精度良く、感光体、およびトナーの電位を検出することが可能となる。なお、シート413は、導電性のある部材で構成し、かつ接地されている。例えば、Al(Aluminium)やSUS(Steel Use Stainless)の1mm厚のシートをカンチレバー間に配置することで、より精度の良い検出が可能となる。なお、図示の都合、第1実施形態では示した保持部材14を省略している。
ところで、上述のように、カンチレバー間にシート413を配置する場合、位置1のカンチレバー411x、2のカンチレバー411yそれぞれに同位相の交流電圧を印加すると、感光体20上の電位をモニタリングする位置は同じにはならない。
そこで、本実施形態においては、図11に示すように、それぞれのカンチレバー間に印加する交流電圧の位相をずらした状態で、電位をセンシングする。これにより、図12に示すように、感光体20上の同一の位置、例えばトナーTをモニタリングすることが可能となる。矢印Rは、感光体20が回転する方向を示している。なお、具体的な位相のずれ量は、感光体線速と周方向のカンチレバーアレイ間の距離によって決定する。例えば、位相のずれ量は、感光体線速400mm/s、ピエゾ内蔵型のカンチレバーのアレイ間の距離1mmの場合、異なるカンチレバーアレイ間で同一の感光体の位置を検知する場合の時間差は2.5msecとなる。印加する交流電圧周波数が1kHz〔周期1msec〕とすれば、時間差2.5msecは、カンチレバー間で2.5周期の位相ずれに相当するので、カンチレバー間の位相差は180°に設定すれば良い。
次に、図13(a)に示すように、例えば感光体20の長手方向に沿ってカンチレバーを複数並べたアレイ構造とした本実施形態の電位検出装置において、電位検出に与える影響を考慮する必要がある。その影響とは、本手法での検出ノイズ要因の1つに、感光体20の回転により発生する気流によってカンチレバーが変形することで、電位検出の際、ノイズを発生させるというものである。
そこで、本実施形態においては、図13(a)のZ部分を拡大表示した図13(b)のように、長手方向に連なるカンチレバーアレイで、隣り合うカンチレバーの支点を交互に反転して配置した。これにより、それぞれの信号の平均を求めることで、気流による検出ノイズを低減することが可能である。
感光体の近傍で発生する気流は、感光体の線速や、カンチレバー自体を含むセンシング部の配置、経時での回転振れ変動等で複雑に変化する。これに対して、図13(b)で示した配置とすれば、隣り合うカンチレバー間で、カンチレバーの支点とレバー自体が、感光体の回転方向に対して、対称になるように配置されているので、感光体の回転とカンチレバー自身を含むセンシング部の配置によって発生するランダムな気流の影響をキャンセルすることができる。
なお、上述する各実施の形態は、本発明の好適な実施の形態であり、本発明の要旨を逸脱しない範囲内において種々変更実施が可能である。例えば、本実施形態の電位検出装置10は、検知した電位ムラから露光量制御を行うことによる画像濃度補正に適用する以外に、ユーザーに感光体の交換メッセージを提示する際にも適用することができる。例えば、露光量で現像ポテンシャルを調整しきれない程、光疲労が極度に進行した場合は、感光体交換のメッセージをユーザーに知らせることで、スジ画像等の異常画像の発生を未然に防ぐことができる。
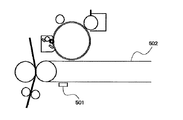
また、本実施形態の電位検出装置は、図14及び図15に示すように、他の電子写真部材の状態検知にも適用可能である。図14は、転写ベルト502の表面電位を検出するため電位検出装置501を設けた他の画像形成装置の構成であり、図15は、帯電ローラ603の表面電位を検出するために電位検出装置601を設けた他の画像形成装置の構成である。
このように、本実施形態の電位検出装置は、経時での表面汚染による、転写ベルトや帯電ローラの電位ムラ発生を検知することにも適用可能である。転写ベルトや帯電ローラの場合、放電を用いて、長手方向に一様に電位を印加するため、長手方向の電位を補正することはできないが、適切なタイミングでユーザーに、転写ベルトや帯電ローラの交換をするようにメッセージを提示することができる。また、転写ベルトや帯電ローラ上のトナーを検知してクリーニング不良等を防止することができる。