JP2014187530A - 投影装置、画像出力装置、投影方法及び投影プログラム - Google Patents
投影装置、画像出力装置、投影方法及び投影プログラム Download PDFInfo
- Publication number
- JP2014187530A JP2014187530A JP2013060735A JP2013060735A JP2014187530A JP 2014187530 A JP2014187530 A JP 2014187530A JP 2013060735 A JP2013060735 A JP 2013060735A JP 2013060735 A JP2013060735 A JP 2013060735A JP 2014187530 A JP2014187530 A JP 2014187530A
- Authority
- JP
- Japan
- Prior art keywords
- output
- projection
- image
- angle
- recommended
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Projection Apparatus (AREA)
- Liquid Crystal Display Device Control (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
Abstract
【解決手段】CPU19は、当該プロジェクタ1とスクリーン2との相対角度を例えば姿勢センサ23によって取得し、その取得された相対角度に基づいて、PC4に推奨する出力画素数を算出して、PC4に通知する。そして、その通知された出力画素数に応じてPC4から出力された画像信号を、相対角度に基づいて、歪み補正して投影する。
【選択図】図1
Description
第1実施形態について図面を参照して説明する。本実施形態に係る投影装置は、出力表示素子としてマイクロミラー表示素子を用いたDigital Light Processing(DLP)(登録商標)方式を用いている。本実施形態に係る投影装置としてのプロジェクタ1は、図1(A)に示すように、本実施形態に係る画像出力装置としてのパーソナルコンピュータ(PC)4に接続され、該PC4の出力画像を受けて、スクリーン2に投影表示するものである。
まず、プロジェクタ1の投影動作を説明する。この投影動作は、CPU19の制御の下、投影処理部14が実行するものである。光源部16の動作は、投影処理部14により制御される。投影処理部14は、光源部16内の各色を発する半導体レーザやLEDのオン又はオフや、それら光源と蛍光体との組み合わせなどを変化させることで、例えば赤色光(R)、緑色光(G)、青色光(B)の3色の光を、光源部16から順次射出させる。投影処理部14は、光源部16からマイクロミラー素子15に順次、赤色光、緑色光、及び青色光を入射させる。
すなわち、PC4側においては、不図示CPUが、同じく不図示のメモリに格納されたプログラムに従って動作し、まず、ステップS401において、プロジェクタ1に対して、現在の出力画素数つまりデフォルト出力画素数を通知する。
なお、歪み補正処理は、プロジェクタ1側ではなくPC4側で実施することも可能である。図5は、この場合の歪み補正動作の一例を表すフローチャートである。ここで、図5(A)はプロジェクタ1側の動作、図5(B)はPC4側の動作である。
第2実施形態について説明する。ここでは、第1実施形態との相違点について説明し、同一の部分については、同一の符号を付してその説明を省略する。本実施形態では、歪み補正の際にロール角も調整し得るようにすることで、さらに画素利用率を高めることができるようにしたものである。
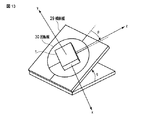
図7は、図15の状態の後、z軸を回転軸として矢印方向に角度rだけ回転させた場合を表している。図8はその詳細である。ここで、図8(A)及び(B)は、図16(A)及び(B)と同様である。図8(C)において、z軸を回転軸として矢印方向に三つ目の角度である角度rだけ回転させる。これにより、x軸とy軸はそれぞれ点線に移動する。図8(D)の三つの矢印は、先ず水平方向に角度hだけ回転させ、次に垂直方向に角度vだけ回転させ、さらにロール角度rだけ回転させた後のプロジェクタ座標系である。このとき、x軸は、もはや水平ベース3に対して平行ではない。

すなわち、前記第1実施形態と同様にして、歪み補正処理パラメータを決定し、PC4からデフォルトの出力画素数を受信した後、本実施形態では、処理はステップS121に進む。このステップS121においては、CPU19は、ユーザが操作部22を用いて設定した動作モードとして、ロール角変更モードが選択されているか否かを判定する。ロール角度変更モードが選択されていないと判定されたとき、処理はステップS105に進んで、前記第1実施形態と同様の動作を実行する。
なお、歪み補正処理は、前記第1実施形態の変形例と同様に、プロジェクタ1側ではなくPC4側で実施することも可能である。図12は、この場合の歪み補正動作の一例を表すフローチャートである。ここで、図12(A)はプロジェクタ1側の動作、図12(B)はPC4側の動作である。なお、紙面の都合上、プロジェクタ1側の動作は、前記第1実施形態の変形例と異なる部分のみ、すなわち前記ステップS112とステップS113との間に挿入される処理のみを示している。
前記第2実施形態では、電動脚部28を用いてロール角を変更するようにしたが、ロール角変更機構はそのようなものに限定されない。
[1]
画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置であって、
当該投影装置と前記被投影体との相対角度を取得する取得手段と、
取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出する推奨画素数算出手段と、
算出された前記出力画素数を前記画像出力装置に通知する通知手段と、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度に基づいて、歪み補正して投影する歪み補正手段と、
を備えることを特徴とする投影装置。
前記推奨画素数算出手段は、当該投影装置の出力表示素子の画素利用率を向上させるような出力画素数を算出することを特徴とする[1]に記載の投影装置。
前記推奨画素数算出手段は、当該投影装置の出力表示素子の横縦比と異なる出力画素数を算出することを特徴とする[1]又は[2]に記載の投影装置。
前記推奨画素数算出手段は、前記出力画素数の横縦比が所定の範囲になるような出力画素数を算出することを特徴とする[1]乃至[3]のうち何れか一に記載の投影装置。
前記取得手段は、前記画像出力装置のデフォルトの出力画素数を更に取得し、
前記推奨画素数算出手段は、取得された前記デフォルトの出力画素数に近い出力画素数を算出することを特徴とする[1]乃至[4]のうち何れか一に記載の投影装置。
前記推奨画素数算出は、前記出力画素数の候補を複数算出することを特徴とする[1]乃至[5]のうち何れか一に記載の投影装置。
投影画像がロールするようにロール角を変更するロール角変更手段を更に備え、
前記推奨画素数算出手段は、前記ロール角変更手段により変更されるロール角も更に考慮して、出力画素数を算出し、
前記歪み補正手段は、前記ロール角変更手段により変更されるロール角を考慮して、投影画像を前記被投影体で矩形画像となるように歪み補正して投影することを特徴とする[1]乃至[6]のうち何れか一に記載の投影装置。
前記取得手段は、当該投影装置の投影時の画角情報を更に取得し、
前記推奨画素数算出手段は、取得された前記画角情報に更に基づいて、前記出力画素数を算出することを特徴とする[1]乃至[7]のうち何れか一に記載の投影装置。
前記取得手段は、
前記被投影体までの複数の点までの距離を測定する測距手段を含み、
前記測距手段で測定された測定結果に基づいて、前記相対角度を取得することを特徴とする[1]乃至[8]のうち何れか一に記載の投影装置。
当該投影装置の姿勢を検出する姿勢検出手段を更に備え、
前記取得手段は、前記姿勢検出手段で検出された検出結果に基づいて、前記相対角度を取得することを特徴とする[1]乃至[9]のうち何れか一に記載の投影装置。
出力した画像信号を被投影体に投影する投影装置と協働する画像出力装置であって、
前記投影装置と前記被投影体との相対角度及び投影時の画角情報を取得する取得手段と、
取得された前記相対角度及び前記画角情報に基づいて、歪み補正する際に出力する画像信号の推奨する出力画素数を算出する推奨画素数算出手段と、
前記相対角度及び前記画角情報に基づいて、出力する画像信号を歪み補正する歪み補正手段と、
算出した推奨する出力画素数で、歪み補正された前記画像信号を前記投影装置に出力する出力手段と、
を備えることを特徴とする画像出力装置。
前記歪み補正手段は、前記投影装置に前記相対角度及び前記画角情報に基づいて、前記投影装置の出力表示素子の画素利用率を向上させるように歪み補正することを特徴とする[11]に記載の画像出力装置。
前記取得手段は、前記投影装置の出力表示素子の画素数を更に取得し、
前記推奨画素数算出手段は、取得された前記画素数に更に基づいて、前記推奨する出力画素数を算出することを特徴とする[11]又は[12]に記載の画像出力装置。
前記歪み補正手段は、前記投影装置にロール角調整をさせるように画像信号を歪み補正し、
前記ロール角の調整量を前記投影装置に通知する通知手段を更に備えることを特徴とする[11]乃至[13]のうち何れか一に記載の画像出力装置。
画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置における投影方法であって、
当該投影装置と前記被投影体との相対角度を取得する相対角度取得工程と、
前記相対角度取得工程により取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出する推奨画素数算出工程と、
前記推奨画素数算出工程により算出された前記出力画素数を前記画像出力装置に通知する通知工程と、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度取得工程により取得された前記相対角度に基づいて、歪み補正して投影する歪み補正工程と、
を備えることを特徴とする投影方法。
画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置におけるコンピュータに、
当該投影装置と前記被投影体との相対角度を取得することと、
取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出することと、
算出された前記出力画素数を前記画像出力装置に通知することと、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度に基づいて、歪み補正して投影することと、
を実行させるための投影プログラム。
Claims (16)
- 画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置であって、
当該投影装置と前記被投影体との相対角度を取得する取得手段と、
取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出する推奨画素数算出手段と、
算出された前記出力画素数を前記画像出力装置に通知する通知手段と、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度に基づいて、歪み補正して投影する歪み補正手段と、
を備えることを特徴とする投影装置。 - 前記推奨画素数算出手段は、当該投影装置の出力表示素子の画素利用率を向上させるような出力画素数を算出することを特徴とする請求項1に記載の投影装置。
- 前記推奨画素数算出手段は、当該投影装置の出力表示素子の横縦比と異なる出力画素数を算出することを特徴とする請求項1又は請求項2に記載の投影装置。
- 前記推奨画素数算出手段は、前記出力画素数の横縦比が所定の範囲になるような出力画素数を算出することを特徴とする請求項1乃至請求項3のうち何れか一に記載の投影装置。
- 前記取得手段は、前記画像出力装置のデフォルトの出力画素数を更に取得し、
前記推奨画素数算出手段は、取得された前記デフォルトの出力画素数に近い出力画素数を算出することを特徴とする請求項1乃至請求項4のうち何れか一に記載の投影装置。 - 前記推奨画素数算出は、前記出力画素数の候補を複数算出することを特徴とする請求項1乃至請求項5のうち何れか一に記載の投影装置。
- 投影画像がロールするようにロール角を変更するロール角変更手段を更に備え、
前記推奨画素数算出手段は、前記ロール角変更手段により変更されるロール角も更に考慮して、出力画素数を算出し、
前記歪み補正手段は、前記ロール角変更手段により変更されるロール角を考慮して、投影画像を前記被投影体で矩形画像となるように歪み補正して投影することを特徴とする請求項1乃至請求項6のうち何れか一に記載の投影装置。 - 前記取得手段は、当該投影装置の投影時の画角情報を更に取得し、
前記推奨画素数算出手段は、取得された前記画角情報に更に基づいて、前記出力画素数を算出することを特徴とする請求項1乃至請求項7のうち何れか一に記載の投影装置。 - 前記取得手段は、
前記被投影体までの複数の点までの距離を測定する測距手段を含み、
前記測距手段で測定された測定結果に基づいて、前記相対角度を取得することを特徴とする請求項1乃至請求項8のうち何れか一に記載の投影装置。 - 当該投影装置の姿勢を検出する姿勢検出手段を更に備え、
前記取得手段は、前記姿勢検出手段で検出された検出結果に基づいて、前記相対角度を取得することを特徴とする請求項1乃至請求項9のうち何れか一に記載の投影装置。 - 出力した画像信号を被投影体に投影する投影装置と協働する画像出力装置であって、
前記投影装置と前記被投影体との相対角度及び投影時の画角情報を取得する取得手段と、
取得された前記相対角度及び前記画角情報に基づいて、歪み補正する際に出力する画像信号の推奨する出力画素数を算出する推奨画素数算出手段と、
前記相対角度及び前記画角情報に基づいて、出力する画像信号を歪み補正する歪み補正手段と、
算出した推奨する出力画素数で、歪み補正された前記画像信号を前記投影装置に出力する出力手段と、
を備えることを特徴とする画像出力装置。 - 前記歪み補正手段は、前記投影装置に前記相対角度及び前記画角情報に基づいて、前記投影装置の出力表示素子の画素利用率を向上させるように歪み補正することを特徴とする請求項11に記載の画像出力装置。
- 前記取得手段は、前記投影装置の出力表示素子の画素数を更に取得し、
前記推奨画素数算出手段は、取得された前記画素数に更に基づいて、前記推奨する出力画素数を算出することを特徴とする請求項11又は請求項12に記載の画像出力装置。 - 前記歪み補正手段は、前記投影装置にロール角調整をさせるように画像信号を歪み補正し、
前記ロール角の調整量を前記投影装置に通知する通知手段を更に備えることを特徴とする請求項11乃至請求項13のうち何れか一に記載の画像出力装置。 - 画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置における投影方法であって、
当該投影装置と前記被投影体との相対角度を取得する相対角度取得工程と、
前記相対角度取得工程により取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出する推奨画素数算出工程と、
前記推奨画素数算出工程により算出された前記出力画素数を前記画像出力装置に通知する通知工程と、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度取得工程により取得された前記相対角度に基づいて、歪み補正して投影する歪み補正工程と、
を備えることを特徴とする投影方法。 - 画像出力装置より出力される画像信号を入力して被投影体に投影する投影装置におけるコンピュータに、
当該投影装置と前記被投影体との相対角度を取得することと、
取得された前記相対角度に基づいて、前記画像出力装置に推奨する出力画素数を算出することと、
算出された前記出力画素数を前記画像出力装置に通知することと、
前記通知された前記出力画素数に応じて前記画像出力装置から出力された画像信号を、前記相対角度に基づいて、歪み補正して投影することと、
を実行させるための投影プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013060735A JP6197322B2 (ja) | 2013-03-22 | 2013-03-22 | 投影装置、画像出力装置、投影方法及び投影プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013060735A JP6197322B2 (ja) | 2013-03-22 | 2013-03-22 | 投影装置、画像出力装置、投影方法及び投影プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014187530A true JP2014187530A (ja) | 2014-10-02 |
| JP6197322B2 JP6197322B2 (ja) | 2017-09-20 |
Family
ID=51834647
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013060735A Active JP6197322B2 (ja) | 2013-03-22 | 2013-03-22 | 投影装置、画像出力装置、投影方法及び投影プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6197322B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023113201A1 (ko) * | 2021-12-17 | 2023-06-22 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| WO2024029991A1 (ko) * | 2022-08-05 | 2024-02-08 | 삼성전자 주식회사 | 전자 장치 및 그 동작 방법 |
| US12615352B2 (en) | 2022-08-05 | 2026-04-28 | Samsung Electronics Co., Ltd. | Electronic device and operation method thereof |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004032484A (ja) * | 2002-06-27 | 2004-01-29 | Sony Corp | 投影型画像表示装置および画像変換方法 |
| JP2005150818A (ja) * | 2003-11-11 | 2005-06-09 | Nec Viewtechnology Ltd | 歪補正手段を有するコンピュータを備えたプロジェクタシステム |
| JP2006005549A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 画像投射装置、画像処理装置および画像処理方法 |
| JP2006313259A (ja) * | 2005-05-09 | 2006-11-16 | Seiko Epson Corp | プロジェクタへの画像の供給 |
| JP2009005148A (ja) * | 2007-06-22 | 2009-01-08 | Seiko Epson Corp | 画像処理装置、プロジェクタ |
-
2013
- 2013-03-22 JP JP2013060735A patent/JP6197322B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004032484A (ja) * | 2002-06-27 | 2004-01-29 | Sony Corp | 投影型画像表示装置および画像変換方法 |
| JP2005150818A (ja) * | 2003-11-11 | 2005-06-09 | Nec Viewtechnology Ltd | 歪補正手段を有するコンピュータを備えたプロジェクタシステム |
| JP2006005549A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 画像投射装置、画像処理装置および画像処理方法 |
| JP2006313259A (ja) * | 2005-05-09 | 2006-11-16 | Seiko Epson Corp | プロジェクタへの画像の供給 |
| JP2009005148A (ja) * | 2007-06-22 | 2009-01-08 | Seiko Epson Corp | 画像処理装置、プロジェクタ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023113201A1 (ko) * | 2021-12-17 | 2023-06-22 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| WO2024029991A1 (ko) * | 2022-08-05 | 2024-02-08 | 삼성전자 주식회사 | 전자 장치 및 그 동작 방법 |
| US12615352B2 (en) | 2022-08-05 | 2026-04-28 | Samsung Electronics Co., Ltd. | Electronic device and operation method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6197322B2 (ja) | 2017-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6244638B2 (ja) | 投影装置、投影方法及び投影プログラム | |
| JP6201359B2 (ja) | 投影システム、投影方法及び投影プログラム | |
| US9723281B2 (en) | Projection apparatus for increasing pixel usage of an adjusted projection area, and projection method and program medium for the same | |
| US9514716B2 (en) | Projection apparatus, projection control apparatus, projection system, and projection state adjustment method | |
| US11006066B2 (en) | Projector and method for controlling projector | |
| US11503260B2 (en) | Projector and method for controlling projector | |
| JP2005033703A (ja) | 画像処理システム、プロジェクタ、プログラム、情報記憶媒体および画像処理方法 | |
| JP6127443B2 (ja) | 投影装置及び投影状態調整方法 | |
| JP6926464B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP6197322B2 (ja) | 投影装置、画像出力装置、投影方法及び投影プログラム | |
| JP6590008B2 (ja) | 投影装置、投影方法及び投影プログラム | |
| JP2013083985A (ja) | 投影装置、投影方法及びプログラム | |
| JP6232695B2 (ja) | 投影装置、投影制御装置、投影システム及び投影状態調整方法 | |
| JP5630799B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP6286978B2 (ja) | 投影装置、投影方法及び投影プログラム | |
| JP2017169204A (ja) | 投影装置及び投影状態調整方法 | |
| JP2006235073A (ja) | 投影装置、投影方法及びプログラム | |
| JP2009186678A (ja) | 投影装置及び投影制御方法 | |
| JP2017152765A (ja) | プロジェクター及びプロジェクターの制御方法 | |
| JP4511433B2 (ja) | 画像処理システム、プロジェクタ、携帯型装置および画像処理方法 | |
| JP2011252972A (ja) | 投影装置、投影方法及びプログラム | |
| JP2009069661A (ja) | 投影装置、投影方法及びプログラム | |
| JP2005227640A (ja) | 投影装置、測距処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160229 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170725 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6197322 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |