JP2014190815A - 弾性表面波デバイス及びこれを用いた物理量検出装置 - Google Patents
弾性表面波デバイス及びこれを用いた物理量検出装置 Download PDFInfo
- Publication number
- JP2014190815A JP2014190815A JP2013066191A JP2013066191A JP2014190815A JP 2014190815 A JP2014190815 A JP 2014190815A JP 2013066191 A JP2013066191 A JP 2013066191A JP 2013066191 A JP2013066191 A JP 2013066191A JP 2014190815 A JP2014190815 A JP 2014190815A
- Authority
- JP
- Japan
- Prior art keywords
- stw
- saw
- surface acoustic
- change
- acoustic wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000010897 surface acoustic wave method Methods 0.000 claims abstract description 84
- 238000005259 measurement Methods 0.000 claims abstract description 44
- 239000000758 substrate Substances 0.000 claims abstract description 35
- 230000005284 excitation Effects 0.000 claims description 60
- 238000001514 detection method Methods 0.000 claims description 47
- 230000001681 protective effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 claims description 4
- 230000000704 physical effect Effects 0.000 claims description 3
- 230000010355 oscillation Effects 0.000 description 7
- 239000000126 substance Substances 0.000 description 7
- 239000002184 metal Substances 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 239000000017 hydrogel Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000010453 quartz Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004132 cross linking Methods 0.000 description 1
- 239000007772 electrode material Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
- 239000011345 viscous material Substances 0.000 description 1
Images

Landscapes
- Surface Acoustic Wave Elements And Circuit Networks Thereof (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
【課題】横波型弾性表面波のSTWデバイスと縦波型弾性表面波のSAWデバイスとを個別に用意して、それぞれの感応膜を測定し、それらの情報から粘性変化を測定すると、感応膜のバラつきから、正確な測定ができなかった。
【解決手段】圧電基板上に、STW伝搬方向にSTW励振用電極111とSTW検出用電極112とを形成し、SAW伝搬方向にSAW励振電極121とSAW検出電極122とを形成する。STWとSAWが交差する部分を被測定部位110としそこに感応膜を設ける。1つの感応膜の変化に対するSAWの伝搬速度変化とSTWの伝搬速度変化とを測定すれば、感応膜の正確な粘性変化を測定することが可能である。
【選択図】図1
【解決手段】圧電基板上に、STW伝搬方向にSTW励振用電極111とSTW検出用電極112とを形成し、SAW伝搬方向にSAW励振電極121とSAW検出電極122とを形成する。STWとSAWが交差する部分を被測定部位110としそこに感応膜を設ける。1つの感応膜の変化に対するSAWの伝搬速度変化とSTWの伝搬速度変化とを測定すれば、感応膜の正確な粘性変化を測定することが可能である。
【選択図】図1
Description
本発明は、弾性表面波の伝搬特性を利用するデバイスに関し、特に横波型弾性表面波であるSTW及び縦波型弾性表面波であるSAWが同一の被測定部位を伝搬する弾性表面波デバイス及び物理量検出装置に関する。
弾性表面波デバイスは、圧電基板表面に弾性表面波を発生させ、その弾性表面波の伝搬経路における表面の物性変化による弾性表面波の変調を検知することができるデバイスである。
一般に、弾性表面波デバイスは、圧電基板と、圧電基板上に少なくとも2つの櫛歯形状の電極を配置する。第1の櫛歯形状の電極は励振用電極であり、この励振用電極により弾性表面波を発生させる。弾性表面波は圧電基板表面を伝搬し、第2の櫛歯形状の電極まで伝搬する。第2の櫛歯形状の電極は検出用電極であり、弾性表面波を検出することができる。
弾性表面波デバイスを構成する圧電基板表面は、環境の影響を受け表面近傍の密度、誘電率、導電率が変化する。
弾性表面波は、縦波型弾性表面波(Surface Acoustic Wave:SAW)と横波型弾性表面波(Surface Transverse Wave:STW)とがある。一般に、これらの波の違いを弾性表面波のモードと呼ぶ。
圧電基板表面の特異的な表面修飾と弾性表面波のモードとによって、環境の影響を受けて変化する弾性表面波の伝搬速度や振幅の変化に変換される。
弾性表面波は、縦波型弾性表面波(Surface Acoustic Wave:SAW)と横波型弾性表面波(Surface Transverse Wave:STW)とがある。一般に、これらの波の違いを弾性表面波のモードと呼ぶ。
圧電基板表面の特異的な表面修飾と弾性表面波のモードとによって、環境の影響を受けて変化する弾性表面波の伝搬速度や振幅の変化に変換される。
従って、換言すると、弾性表面波の伝搬速度や振幅の変化を検出することにより、環境の変化を検出することが可能である。
このような弾性表面波デバイスを利用して、圧電基板の表面に付着した被測定物の検出する研究が行われている。
以後、このようなデバイスの中で、STWを用いた弾性表面波デバイスをSTWデバイス、SAWを用いた弾性表面波デバイスをSAWデバイスと呼ぶこととする。
圧電基板表面に現れる弾性表面波のモードは使用する圧電基板により変わる。検出対象となる被測定物や検出したい環境(物理量)によって、適するモードがある。例えば、SAWを用いると被測定部位の質量変化を検出できるのに対し、STWを用いると被測定部位の質量変化と粘性変化とが足し合わさった変化を検出することができることが知られている。
このようなSTWモードを用いた弾性表面波デバイスは多くの提案を見るものであるが、2つの弾性表面波の伝搬経路にそれぞれ感応膜を用いる技術が提案されている(例えば、特許文献1参照。)。
特許文献1に示した従来技術の、STWモードを用いた弾性表面波デバイスの構成は、圧電基板の表面上に2組の励振用電極と検出用電極とが平行に配置され、それぞれの伝搬経路には同種類の感応膜が設けられている。2つの感応膜の1つは基準用感応膜として用い、その感応膜は被測定物が吸着しないように封止されている。もう1つの感応膜は、測
定用感応膜として用い、その感応膜は被測定物が吸着可能なように開口されている。
定用感応膜として用い、その感応膜は被測定物が吸着可能なように開口されている。
被測定物の到来により、測定用感応膜を有する伝搬経路を通る弾性表面波と、基準用感応膜を有する伝搬経路を通る弾性表面波との伝搬速度に差が生じ、その差から被測定物の濃度を検出することが可能である。
弾性表面波の伝搬速度は被測定物の到来以外にも、環境温度によっても変化する。通常、この環境温度変化による伝搬速度の変化はノイズとなり測定精度を劣化させる。ここで、測定用感応膜を有する伝搬経路を通る弾性表面波の伝搬速度変化は、被測定物の到来と環境温度変化とによって引き起こされ、基準用感応膜を有する伝搬経路を通る弾性表面波の伝搬速度変化は、環境温度変化のみにより引き起こされるため、その差をとると、被測定物の到来による伝搬速度変化のみを得ることができる。
この伝搬速度変化を検出することにより被測定物の濃度を高精度で検出することが可能である。
すでに説明したように、被測定物の到来をSTWデバイスで検出する場合、弾性表面波の伝搬速度の変化は質量変化と粘性変化とによって引き起こされる。被測定物の到来を粘性変化で検出する感応膜を用いた場合、質量変化による伝搬速度の変化がノイズとなり正確な測定ができないという課題があった。
そのような課題に対しては、STWデバイスの他にSAWデバイスも併用するという考えがある。つまり、SAWデバイスは感応膜の質量変化のみの影響を受けることを利用するのである。
すなわち、SAWデバイスから質量変化分を読み取り、STWでの質量変化へ換算すれば、STWデバイスから得られる質量変化によるノイズ成分を相殺することができる。
しかしながら、上記のように単にSAWデバイスとSTWデバイスとを個別に用意して、それらを組み合わせただけでは、正確な測定値が得られないという問題があった。
すなわち、それぞれのデバイスに用いられている感応膜は別物であるから、感応膜の製造時の厚みバラつきをゼロにすることができない。このバラつきがあると、その影響を受けてしまい、正確な測定ができなくなるのである。また、バラつきが大きくなると、測定そのものができなくなることもある。
本発明は、これらの問題を解決するためになされたものであり、感応膜の粘性変化のみを測定することができるので高精度な測定が可能な弾性表面波デバイス及び物理量検出装置を提供することを目的とする。
本発明の弾性表面波デバイスは、上記の目的を達成するため、下記記載の構成を採用するものである。
弾性表面波を基板に発生し、この基板の所定の検出部位に配置された被測定部位の物性を測定する弾性表面波デバイスにおいて、
基板は、その一表面に横波型弾性表面波と縦波型弾性表面波とが直交する方向に伝搬する圧電基板であり、
一表面の横波型弾性表面波が伝搬する方向に、所定の周波数の第1の励振信号が入力されて横波型弾性表面波を発生させるSTW励振用電極と、これと所定の距離を離間して対向して配置するSTW検出用電極と、からなるSTW電極対を備え、
一表面の縦波型弾性表面波が伝搬する方向に、所定の周波数の第2の励振信号が入力されて縦波型弾性表面波を発生させるSAW励振用電極と、これと所定の距離を離間して対向して配置するSAW検出用電極と、からなるSAW電極対を備え、
STW電極対とSAW電極対とが交差する位置に被測定部位を配置し、
この被測定部位に感応膜を備えることを特徴とする。
基板は、その一表面に横波型弾性表面波と縦波型弾性表面波とが直交する方向に伝搬する圧電基板であり、
一表面の横波型弾性表面波が伝搬する方向に、所定の周波数の第1の励振信号が入力されて横波型弾性表面波を発生させるSTW励振用電極と、これと所定の距離を離間して対向して配置するSTW検出用電極と、からなるSTW電極対を備え、
一表面の縦波型弾性表面波が伝搬する方向に、所定の周波数の第2の励振信号が入力されて縦波型弾性表面波を発生させるSAW励振用電極と、これと所定の距離を離間して対向して配置するSAW検出用電極と、からなるSAW電極対を備え、
STW電極対とSAW電極対とが交差する位置に被測定部位を配置し、
この被測定部位に感応膜を備えることを特徴とする。
一表面を覆い、被測定部位を開口する保護膜を備えるようにしてもよい。
上記課題を解決するため、本発明の物理量検出器は、下記記載の構成を採用する。
上述の弾性表面波デバイスを用いる物理量検出装置であり、
第1の励振信号を発生する第1の発振器と、
第2の励振信号を発生する第2の発振器と、
STW検出用電極から第1の信号を所定の時間取り込み、所定の波形を抽出するSTW用波形検出器と、
SAW検出用電極から第2の信号を所定の時間取り込み、所定の波形を抽出するSAW用波形検出器と、
STW用波形検出器及びSAW用波形検出器の検出結果から、被測定部位の粘性変化を検出する粘性検出器と、
を備え、
STW用波形検出器は、第1の信号を周波数カウンタにより計測し、この情報から被測定部位の質量変化と粘性変化との情報を含む第1の変化情報を検出し、
SAW用波形検出器は、第2の信号を周波数カウンタにより計測し、この情報から被測定部位の質量変化の情報を含む第2の変化情報を検出し、
粘性検出器は、第1の変化情報から第2の変化情報の除去処理をすることで、被測定部位の粘性変化を検出することを特徴とする。
第1の励振信号を発生する第1の発振器と、
第2の励振信号を発生する第2の発振器と、
STW検出用電極から第1の信号を所定の時間取り込み、所定の波形を抽出するSTW用波形検出器と、
SAW検出用電極から第2の信号を所定の時間取り込み、所定の波形を抽出するSAW用波形検出器と、
STW用波形検出器及びSAW用波形検出器の検出結果から、被測定部位の粘性変化を検出する粘性検出器と、
を備え、
STW用波形検出器は、第1の信号を周波数カウンタにより計測し、この情報から被測定部位の質量変化と粘性変化との情報を含む第1の変化情報を検出し、
SAW用波形検出器は、第2の信号を周波数カウンタにより計測し、この情報から被測定部位の質量変化の情報を含む第2の変化情報を検出し、
粘性検出器は、第1の変化情報から第2の変化情報の除去処理をすることで、被測定部位の粘性変化を検出することを特徴とする。
第1の励振信号と第2の励振信号との所定の周波数は、それぞれ異なるようにしてもよい。
本発明によれば、感応膜の粘性変化のみを測定することができ、しかも1つの感応膜を測定するから、感応膜のバラつきの影響を排除できるので、高精度な測定が可能となる。
本発明の弾性表面波デバイスは、1つの圧電基板にSTWとSAWとを発生させる励振用電極と検出用電極とからなる電極対をそれぞれ設けている。これらの弾性表面波が交差する位置を被測定部位とし、そこに感応膜を備えている。感応膜が1つであるから、その膜のバラつきはなく、コンパクトで高精度な測定が可能なデバイスを構成できる。
以下、本発明の弾性表面波デバイス及びこれを用いた物理量検出装置の好ましい実施の形態について図面を参照しながら説明する。第1の実施形態として、図1を用いて弾性表面波デバイスを説明する。第2の実施形態として、図2を用いて物理量検出装置を説明する。
説明にあっては、圧電基板を37°回転Yカット水晶基板とし、電極材料を金とする例で説明する。また、弾性表面波デバイスに到来する被測定物(たとえば、液体や気体など)を検出する場合を例にして説明する。
[第1の実施形態の説明:図1]
弾性表面波デバイスの第1の実施形態を、図1を用いて説明する。
弾性表面波デバイスの特徴は、互いに直交するSTW励振用電極とSAW励振用電極とを2つの励振信号で駆動する。それにより発生した2つの弾性表面波は、同一の被測定部位を伝播して、それぞれSTW検出用電極とSAW検出用電極により検出される。
弾性表面波デバイスの第1の実施形態を、図1を用いて説明する。
弾性表面波デバイスの特徴は、互いに直交するSTW励振用電極とSAW励振用電極とを2つの励振信号で駆動する。それにより発生した2つの弾性表面波は、同一の被測定部位を伝播して、それぞれSTW検出用電極とSAW検出用電極により検出される。
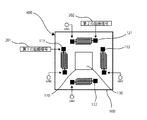
図1に示すように、弾性表面波デバイス400は、SAW伝搬方向とSTW伝搬方向とが直行する圧電基板100に形成される。
例えば、圧電基板100を37°回転Yカット水晶基板で構成すると、圧電基板100の一表面上の所定の方向にSAW伝搬方向があり、それに直交する方向にSTW伝搬方向が存在する。
例えば、圧電基板100を37°回転Yカット水晶基板で構成すると、圧電基板100の一表面上の所定の方向にSAW伝搬方向があり、それに直交する方向にSTW伝搬方向が存在する。
図1に示す例では、圧電基板100の一表面上に、STW伝搬方向にSTW励振用電極111とSTW検出用電極112とがそれぞれ離間されて形成されている。これら2つの電極でSTW電極対を形成している。
同じく、SAW伝搬方向にSAW励振電極121とSAW検出電極122とがそれぞれ離間されて形成されている。これら2つの電極でSAW電極対を形成しており、STW電極対とは直交する方向に形成している。
被測定部位110は、STWとSAWとが交差する部分に設けてある。図1に示す例では、被測定部位110の四方を囲うように、STW電極対及びSAW電極対がバランスよく配置している。
STW励振用電極111は、2つの櫛歯状電極を所定の距離だけ離間して対向配置してなる金属電極であり、櫛歯状電極の一方に第1の励振信号201が入力されており、他方は接地電位(GND)に接続されている。
SAW励振用電極121は、2つの櫛歯状電極を所定の距離だけ離間して対向配置してなる金属電極であり、櫛歯状電極の一方に第2の励振信号202が入力されており、他方は接地電位(GND)に接続されている。
STW検出用電極112は、2つの櫛歯状電極を所定の距離だけ離間して対向配置してなる金属電極であり、櫛歯状電極の一方はSTWを検出して電圧を発生させる電極であり、他方は接地電位(GND)に接続されている。
SAW検出用電極122は、2つの櫛歯状電極を所定の距離だけ離間して対向配置してなる金属電極であり、櫛歯状電極の一方はSAWを検出して電圧を発生させる電極であり、他方は接地電位(GND)に接続されている。
第1の励振信号201及び第2の励振信号202を生成する図示しない信号源は、弾性表面波デバイス400とは異なる基板に設ける。たとえば、シリコン半導体基板に設ける。もちろん、圧電基板100に設けてもよい。
STW励振用電極111に第1の励振信号201が入力されると、STWが励振され被測定部位110を経由してSTW検出用電極112に到達し、STW検出用電極112に信号が発生する。
同様に、SAW励振電極121に第2の励振信号202が入力されると、SAWが励振され被測定部位110を経由してSAW検出用電極122に到達し、SAW検出用電極122に信号が発生する。
同様に、SAW励振電極121に第2の励振信号202が入力されると、SAWが励振され被測定部位110を経由してSAW検出用電極122に到達し、SAW検出用電極122に信号が発生する。
被測定物が到来する前の伝搬速度をVSTWoとすると、被測定物が到来することによる伝搬速度の変化分がΔVSTWである。同様に、被測定物が到来する前の伝搬速度をVSAWoとすると、被測定物が到来することによる伝搬速度の変化分がΔVSAWである。
従って、STWの伝搬速度の変化率は、ΔVSTW/VSTWoとなる。SAWの伝搬速度の変化率は、ΔVSAW/VSAWoとなる。
従って、STWの伝搬速度の変化率は、ΔVSTW/VSTWoとなる。SAWの伝搬速度の変化率は、ΔVSAW/VSAWoとなる。
被測定部位110には、被測定物質が吸着すると粘性変化を引き起こす粘性体を感応膜130として形成する。感応膜130は、被測定部位110を覆うように形成するのであるが、図1に示す例では、被測定部位110と同じサイズで形成している。
このようにすれば、STW伝搬速度の変化率とSAW伝搬速度の変化率とを用いて、粘性変化率に変換することができる。
詳細は後述するが、まず、SAW伝搬速度の変化率から感応膜130の質量変化を知ることができる。次に、STW伝搬速度の変化率からその質量変化分を差し引く、その残りが粘性変化となる。
詳細は後述するが、まず、SAW伝搬速度の変化率から感応膜130の質量変化を知ることができる。次に、STW伝搬速度の変化率からその質量変化分を差し引く、その残りが粘性変化となる。
感応膜130として用いる粘性体としては、被測定物質が吸着すると粘性変化する物質であれば特に限られないが、例えば、ハイドロゲルがある。被測定物質により解離する架橋点をハイドロゲルに導入することにより、被測定物質に対して粘性変化を引き起こすことが可能である。
一方、このハイドロゲル中の水分量は、気温、湿度によって変化し、粘性体の質量が変化してしまう。従来知られているSTWの伝搬速度の減少のみの測定では、被測定物質の吸着による粘性変化だけでなく、粘性体の質量変化による効果も重畳した状況を測定していた。これに対して、本発明はSAWの伝搬速度の減少を独立に測定することにより、粘性体の質量変化を補正することができる。従って、粘性変化を正確に測定することが可能となる。
従来知られているように、SAWデバイスとSTWデバイスとを個々に用いた場合、それぞれの感応膜は同一種類としたとしても、成膜時のバラつきなどから厚みに違いがある。この厚みの違いは粘性体の質量、水分量がもともと異なることを意味しており、正確に質量変化を補正することができない。しかしながら、本発明の構成によれば、1つの感応膜を測定するため正確な測定値が得られる。
[保護膜の付加]
以上説明した実施形態の改良として、圧電基板100の一表面を覆い、被測定部位110を開口する保護膜を備えると好ましい。例えば、図1に示す例では、被測定部位110
と同じサイズを開口ずる保護膜を圧電基板100の表面に形成する。
以上説明した実施形態の改良として、圧電基板100の一表面を覆い、被測定部位110を開口する保護膜を備えると好ましい。例えば、図1に示す例では、被測定部位110
と同じサイズを開口ずる保護膜を圧電基板100の表面に形成する。
このようにすれば、被測定部位110に到来した被測定物質のみを計測することができる。保護膜は特に限られないが、酸化物などの無機材料を用いることができ、樹脂などの高分子材料でもよい。
[第2の実施形態の説明:図2]
次に、第2の実施形態として、弾性表面波デバイスを用いた物理量検出装置を、図2を用いて説明する。なお、すでに説明した同一の構成には同一の番号を付与している。
次に、第2の実施形態として、弾性表面波デバイスを用いた物理量検出装置を、図2を用いて説明する。なお、すでに説明した同一の構成には同一の番号を付与している。
すでに説明した第1の実施形態は、互いに直交するSTWとSAWとが被測定部位を伝搬する際の伝搬速度の変化を測定することにより、感応膜の粘性変化を検出する。第2の実施形態は、アンプを追加し発振器により発振させる構成とすることにより、感度を高くして伝搬速度変化を検出することができる。従って、弾性表面波デバイスとしては第1の実施形態と同じ構成であるが、図2では弾性表面波デバイス401と記載している。
図2に示す物理量検出器500は、弾性表面波デバイス401とSTW用波形検出器211、SAW用波形検出器212、粘性検出器300とで構成している。
STW励振用電極111の櫛歯状電極の一方とSTW検出用電極112の櫛歯状電極の一方との間に第1のアンプ115が接続させており、STW励振用電極111及びSTW検出用電極112の他方は接地電位(GND)に接続されている。
SAW励振用電極121の櫛歯状電極の一方とSAW検出用電極122の櫛歯状電極の一方との間に第2のアンプ125が接続させており、SAW励振用電極121及びSAW検出用電極122の他方は接地電位(GND)に接続されている。
第1のアンプ115は、その入力側がSTW検出用電極112となり、第2のアンプ125は、その入力側がSAW検出用電極122となるように接続されている。
STW励振用電極111とSTW検出用電極112と第1のアンプ115とで第1の発振器114を構成している。同じく、SAW励振用電極121とSAW検出用電極122と第2のアンプ125とで、第2の発振器124を構成している。
第1の実施形態で説明した弾性表面波デバイス400は、第1の励振信号201及び第2の励振信号202は、これを生成する信号源から入力していたが、この弾性表面波デバイス401は、第1の励振信号201及び第2の励振信号202を、弾性表面波による共振現象を用いて発生させている。
すなわち、第1の発振器114は、STW検出用電極112からの出力電圧信号を第1のアンプ115により増幅し、STW励振用電極111へ印加するので、STW励振用電極111から弾性表面波が発生する。同様に、SAW検出用電極122からの出力電圧信号を第2のアンプ125により増幅し、SAW励振用電極121へ印加するので、SAW励振用電極から弾性表面波が発生するのである。
第1の発振器114の出力信号は、第1の信号116である。第1の信号116をSTW用波形検出器211により所定の時間取り込み、電圧波形を抽出する。抽出された電圧波形は、周波数カウンタにより読み取ることができ、これをfSTWと呼ぶ。
第2の発振器124の出力信号は、第2の信号126である。第2の信号126をSA
W用波形検出器212により所定の時間取り込み、電圧波形を抽出する。抽出された電圧波形は、周波数カウンタにより読み取ることができ、これをfSAWと呼ぶ。
第2の発振器124の出力信号は、第2の信号126である。第2の信号126をSA
W用波形検出器212により所定の時間取り込み、電圧波形を抽出する。抽出された電圧波形は、周波数カウンタにより読み取ることができ、これをfSAWと呼ぶ。
なお、周波数カウンタの回路構成やその動作は、公知の技術を用いることができるため、その詳細な説明は省略する。
被測定物の到来する前の初期状態の第1の発振器114の発振周波数をfSTWo、第2の発振器124の発振周波数をfSAWoとする。
被測定物の到来により、感応膜130の質量及び粘性が変化すると、それぞれの発振周波数が減少し、それぞれfSTW、fSAWになったとする。
この周波数の変化を、以下のようにする。
ΔfSTW=fSTW−fSTWo
ΔfSAW=fSAW−fSAWo
被測定物の到来により、感応膜130の質量及び粘性が変化すると、それぞれの発振周波数が減少し、それぞれfSTW、fSAWになったとする。
この周波数の変化を、以下のようにする。
ΔfSTW=fSTW−fSTWo
ΔfSAW=fSAW−fSAWo
第1の発振器114の発振周波数のずれΔfSTW/fSTWoは、第1の実施形態で説明した伝搬速度の変化率ΔVSTW/VSTWoと等しく、伝搬速度の変化率を示している。このSTWの伝搬速度の変化率に等しいΔfSTW/fSTWoを第1の変化情報117とする。この第1の変化情報117は、感応膜130の質量変化と粘性変化との2つの効果が足し合わされている。
第2の発振器124の発振周波数のずれΔfSAW/fSAWoは、第1の実施形態で説明した伝搬速度の変化率ΔVSAW/VSAWoと等しく、伝搬速度の変化を示している。このSAWの伝搬速度の変化率に等しいΔfSAW/fSAWoを第2の変化情報127とする。この第2の変化情報127は、感応膜130の質量変化を示している。
上記の例では、第1の励振信号たる、第1の発振器114の発振周波数fSTWoと、第2の励振信号たる、第2の発振器124の発振周波数fSAWoと、が異なる場合の第1の変化情報117及び第2の変化情報127の計算法を示したが、第1の励振信号と第2の励振信号とは同じであってもよい。その場合、第1の変化情報117をΔfSTWとし、第2の変化情報127をΔfSAWとすればよい。
この粘性検出器300は、第1の変化情報117から第2の変化情報127を差し引くと粘性の変化を示す値を得ることができる。粘性検出器300は、論理演算を行う論理回路で構成している。例えば、除算回路である。このような論理演算にてデジタル処理ができるため、ノイズに強く高速処理可能である。
なお、除算回路は、公知の技術を用いることができるため、その詳細な説明は省略する。
なお、除算回路は、公知の技術を用いることができるため、その詳細な説明は省略する。
以上のように、本発明は、圧電基板100の一表面上に、STW電極対とSAW電極対とを交差するよう配置し、その交差部分に被測定部位110を設け、そこに感応膜130を設けている。STWデバイスとSAWデバイスとを別々に用意する必要はない。従って、1つの感応膜で被測定物を検出することができる。このため、感応膜の製造バラつきなどの要因を排除できると共に、コンパクトで高精度な弾性表面波デバイスを構成できる。
本発明にかかる弾性表面波デバイス及び物理量検出器は、STW及びSAW弾性表面波を用いて、感応膜の粘性変化のみを高精度に測定することができる。このため、匂いセンサやガスセンサに応用できる。
100 圧電基板
110 被測定部位
111 STW励振用電極
112 STW検出用電極
114 第1の発振器
115 第1のアンプ
116 第1の信号
117 第1の変化情報
121 SAW励振電極
122 SAW検出電極
124 第2の発振器
125 第2のアンプ
126 第2の信号
127 第2の変化情報
130 感応膜
201 第1の励振信号
202 第2の励振信号
211 STW用波形検出器
212 SAW用波形検出器
300 粘性検出器
400、401 弾性表面波デバイス
500 物理量検出器
110 被測定部位
111 STW励振用電極
112 STW検出用電極
114 第1の発振器
115 第1のアンプ
116 第1の信号
117 第1の変化情報
121 SAW励振電極
122 SAW検出電極
124 第2の発振器
125 第2のアンプ
126 第2の信号
127 第2の変化情報
130 感応膜
201 第1の励振信号
202 第2の励振信号
211 STW用波形検出器
212 SAW用波形検出器
300 粘性検出器
400、401 弾性表面波デバイス
500 物理量検出器
Claims (4)
- 弾性表面波を基板に発生し、該基板の所定の検出部位に配置された被測定部位の物性を測定する弾性表面波デバイスにおいて、
前記基板は、その一表面に横波型弾性表面波と縦波型弾性表面波とが直交する方向に伝搬する圧電基板であり、
前記一表面の前記横波型弾性表面波が伝搬する方向に、所定の周波数の第1の励振信号が入力されて横波型弾性表面波を発生させるSTW励振用電極と、これと所定の距離を離間して対向して配置するSTW検出用電極と、からなるSTW電極対を備え、
前記一表面の前記縦波型弾性表面波が伝搬する方向に、所定の周波数の第2の励振信号が入力されて縦波型弾性表面波を発生させるSAW励振用電極と、これと所定の距離を離間して対向して配置するSAW検出用電極と、からなるSAW電極対を備え、
前記STW電極対と前記SAW電極対とが交差する位置に前記被測定部位を配置し、
前記被測定部位に感応膜を備える
ことを特徴とする弾性表面波デバイス。 - 前記一表面を覆い、前記被測定部位を開口する保護膜を備える
ことを特徴とする請求項1に記載の弾性表面波デバイス。 - 請求項1又は2に記載の弾性表面波デバイスを用いる物理量検出装置であり、
前記第1の励振信号を発生する第1の発振器と、
前記第2の励振信号を発生する第2の発振器と、
前記STW検出用電極から第1の信号を所定の時間取り込み、所定の波形を抽出するSTW用波形検出器と、
前記SAW検出用電極から第2の信号を所定の時間取り込み、所定の波形を抽出するSAW用波形検出器と、
前記STW用波形検出器及び前記SAW用波形検出器の検出結果から、前記被測定部位の粘性変化を検出する粘性検出器と、
を備え、
前記STW用波形検出器は、前記第1の信号を周波数カウンタにより計測し、この情報から前記被測定部位の質量変化と粘性変化との情報を含む第1の変化情報を検出し、
前記SAW用波形検出器は、前記第2の信号を周波数カウンタにより計測し、この情報から前記被測定部位の質量変化の情報を含む第2の変化情報を検出し、
前記粘性検出器は、前記第1の変化情報から前記第2の変化情報の除去処理をすることで、前記被測定部位の粘性変化を検出することを特徴とする物理量検出装置。 - 前記第1の励振信号と前記第2の励振信号との前記所定の周波数は、それぞれ異なることを特徴とする請求項3に記載の物理量検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013066191A JP2014190815A (ja) | 2013-03-27 | 2013-03-27 | 弾性表面波デバイス及びこれを用いた物理量検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013066191A JP2014190815A (ja) | 2013-03-27 | 2013-03-27 | 弾性表面波デバイス及びこれを用いた物理量検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014190815A true JP2014190815A (ja) | 2014-10-06 |
Family
ID=51837206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013066191A Pending JP2014190815A (ja) | 2013-03-27 | 2013-03-27 | 弾性表面波デバイス及びこれを用いた物理量検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014190815A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017002411A1 (ja) * | 2015-07-01 | 2017-10-05 | 三菱電機株式会社 | ろ過膜蓄積物判定装置及び方法 |
| WO2022186453A1 (ko) * | 2021-03-05 | 2022-09-09 | 재단법인대구경북과학기술원 | 물질 계측 장치, 물질 계측 시스템 및 물질 계측 방법 |
-
2013
- 2013-03-27 JP JP2013066191A patent/JP2014190815A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017002411A1 (ja) * | 2015-07-01 | 2017-10-05 | 三菱電機株式会社 | ろ過膜蓄積物判定装置及び方法 |
| WO2022186453A1 (ko) * | 2021-03-05 | 2022-09-09 | 재단법인대구경북과학기술원 | 물질 계측 장치, 물질 계측 시스템 및 물질 계측 방법 |
| KR20220125414A (ko) * | 2021-03-05 | 2022-09-14 | 재단법인대구경북과학기술원 | 물질 계측 센서, 물질 계측 시스템 및 물질 계측 방법 |
| KR102511788B1 (ko) * | 2021-03-05 | 2023-03-21 | 재단법인대구경북과학기술원 | 물질 계측 센서, 물질 계측 시스템 및 물질 계측 방법 |
| US12584885B2 (en) * | 2021-03-05 | 2026-03-24 | Daegu Gyeongbuk Institute Of Science And Technology | Material measuring device, material measuring system and material measuring method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6568126B2 (ja) | 検体センサおよび検体センシング方法 | |
| US10241082B2 (en) | Analyte sensor and analyte sensing method | |
| CN103512957A (zh) | 声表面波阵列传感器 | |
| CN102305827B (zh) | 基于扫频技术的乐甫波传感器测试系统及测试方法 | |
| KR101025715B1 (ko) | Saw 소자를 이용한 가스 감지센서 및 그 감지방법 | |
| CN100430711C (zh) | 测定方法、测定信号输出电路及测定装置 | |
| CN104459313A (zh) | 一种双谐振元石英晶体微天平的信号采集装置及方法 | |
| JP2014190815A (ja) | 弾性表面波デバイス及びこれを用いた物理量検出装置 | |
| JPH03209157A (ja) | 弾性表面波利用溶液測定装置及び溶液中特定物質の測定法 | |
| TWI416108B (zh) | 石英感測器及感測裝置 | |
| JP5431687B2 (ja) | 被測定物特性測定装置 | |
| JP5123046B2 (ja) | 比誘電率・導電率測定装置及びその測定方法 | |
| JP6317455B2 (ja) | センサ装置およびセンシング方法 | |
| RU2533692C1 (ru) | Мультисенсорная акустическая решетка для аналитических приборов "электронный нос" и "электронный язык" | |
| KR102101567B1 (ko) | 마이크로 공진기를 이용한 미세먼지 측정장치 및 측정방법 | |
| JP2014192692A (ja) | 弾性表面波デバイス及びこれを用いた物理量検出装置 | |
| JP2008298768A (ja) | 比誘電率測定装置 | |
| JP2010032245A (ja) | 比誘電率・導電率測定装置 | |
| dos Santos et al. | Design of a phase readout circuit for saw sensors with an equivalent circuit model | |
| JP2009281801A (ja) | 被測定物特性測定装置 | |
| KR20120050099A (ko) | 캔틸레버 센서 |