JP2014194151A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2014194151A JP2014194151A JP2014032242A JP2014032242A JP2014194151A JP 2014194151 A JP2014194151 A JP 2014194151A JP 2014032242 A JP2014032242 A JP 2014032242A JP 2014032242 A JP2014032242 A JP 2014032242A JP 2014194151 A JP2014194151 A JP 2014194151A
- Authority
- JP
- Japan
- Prior art keywords
- duty ratio
- electric motor
- control unit
- door
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Power-Operated Mechanisms For Wings (AREA)
Abstract
【解決手段】本発明のモータ制御装置41において、制御部53は、スライドドアが途中停止すると、スライドドアを途中停止させてから所定の第1規定時間が経過するまでは、電動モータ21のブレーキ力を所定のブレーキ力に維持し、所定の第1規定時間の経過後は、所定の制御周期ごとに、所定の制御周期に占める電動モータの入力端子の短絡時間の割合であるデューティ比を所定の初期デューティ比から徐々に低下させてブレーキ力を制御する。
【選択図】図3
Description
これにより、傾斜地で停止した車両において、途中停止したスライドドアが重力の作用により傾斜方向に移動する際に、このスライドドアを滑らかに移動させることができる。
図1は、本発明のモータ制御装置で駆動される電動モータを備えるドア開閉装置14の概略を示す平面図である。図1に示すように、車両11の側部には、被駆動体としてのスライドドア12が装着されている。このスライドドア12は、車両11に固定されるガイドレール13に案内され、図中実線で示す全開位置と鎖線で示す全閉位置との間で車両前後方向に移動自在つまり開閉自在となっている。
図2に示すように、駆動ユニット15には電動モータ21が設けられている。この電動モータ21として、本実施形態においては、3相(U相、V相、及びW相)のブラシレスモータが用いられる。電動モータ21は、モータ制御装置41から、通電パターンに従って、3相の各相へ、それぞれ印加電圧Vu、印加電圧Vv、及び印加電圧Vwが供給されると作動する。電動モータ21は、供給される印加電圧の正負に応じて、その回転方向が正転または逆転に切り替えられる。
このため、後述するように電動モータ21により回生ブレーキ力を発生させる際に、電動モータ21の固定子(ステータ)と、ドラム31に接続された回転子47(マグネットロータ)との間にはエアギャップがあり機械的には直接接していないため、電動モータ21に回生ブレーキ力を発生させる際に生じる振動は、クラッチ機構の断続制御により生じる振動(衝撃)よりも少ない。
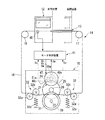
図3は、図2に示すモータ制御装置41、及び電動モータ21の詳細を示す回路図である。電動モータ21は、3相DCブラシレスモータである。電動モータ21は、インナーロータ型で、一対のN極およびS極を含む永久磁石(マグネット)を埋め込んで構成された回転子47(マグネットロータ)を含む。また、電動モータ21は、スター結線されたU相、V相及びW相の固定子巻線21u、21v、及び21wを含む。
また、回転子47に近接して、120度毎に、回転位置検出素子(ホールIC48u、ホールIC48v、及びホールIC48w)が配置される。これらホールICは、回転子47の回転位置を検出する。
なお、駆動信号(ゲート信号)G1は、ハイ信号(H信号)の場合に、対応するトランジスタ42aがオン(ON)になり、ロー信号(L信号)の場合に、対応するトランジスタ42aがオフ(OFF)になる。駆動信号(ゲート信号)G2〜G6についても同様である。
ドア開閉情報生成部52は、ホールIC48u、48v、48wがそれぞれ出力するパルス信号Su、Sv、及びSwが入力されると、パルス信号の発生間隔に基づいて電動モータ21の回転速度、つまりスライドドア12の移動速度Vを算出する。
また、ドア開閉情報生成部52は、パルス信号Su、Sv、及びSwの出現タイミング(出現する順番)に基づいて電動モータ21の回転方向、つまりスライドドア12の移動方向を検出し、方向信号Dを出力する。
ところで、乗員等が開閉スイッチ45を操作して、スライドドア12の開閉中にスライドドア12の停止を指示すると、制御部53は、回生ブレーキ制御部55により、電動モータ21に回生制動をかけて(回生ブレーキ力を発生させて)、その回転を停止させる。この回生制動は、駆動信号G4〜G6(または駆動信号G1〜G3)をデューティ比(Duty)100%とする信号としてドライバ回路51から出力し、駆動回路部42が、対応する下段側のトランジスタ42dと、トランジスタ42eと、トランジスタ42fとをオンさせて固定子巻線21u、21v、及び21w、それぞれに設けられた入力端子22u、22v、及び22wを短絡することにより行なわれる。
回生制動においては、より具体的には、図4(A)に示すように、ドライバ回路51から出力される駆動信号G1〜G3をロー信号(L信号)とし、駆動信号G4〜G6をハイ信号(H信号)とすることにより、上段(上アーム)のトランジスタ42aと、トランジスタ42bと、トランジスタ42cとをオフにする。また、下段(下アーム)のトランジスタ42dと、トランジスタ42eと、トランジスタ42fとをオンにする。
このように、回生ブレーキ制御部55は、デューティ比を制御することにより、回生ブレーキ力の大きさを制御することができる。つまり、回生ブレーキ制御部55は、このデューティ比を小さくすることにより、回生ブレーキ力を低下させることができる。
そして、所定の第1規定時間の経過後(例えば、10分経過後)に、回生ブレーキ制御部55は、デューティ比を徐々に低下させて回生ブレーキ力を弱めることにより、スライドドア12を重力の作用する方向に徐々に移動させる。なお、上記第1所定時間は、車両11における消費電力を低減する省電力モードに移行するために予め設定される時間である。
次に、回生ブレーキ力の具体的な制御例について説明する。
図6は、スライドドア12を途中停止させたときの回生ブレーキ力の第1の制御例を示す図である。この図6は、スライドドア12の位置及び移動速度を検出しない場合の例であり、横方向に時間tの経過を示し、縦方向に回生ブレーキ動作のデューティ比Duの時間変化と、スライドドア12の移動速度であるドア速度Spの時間変化と、を並べて示したものである。
そして、この時刻t1から所定の第1規定時間(例えば、10分)が経過する時刻t2までの間、回生ブレーキ制御部55は、電動モータ21にデューティ比100%の回生ブレーキ動作を行わせる。
また、図7は、スライドドア12を途中停止させたときの回生ブレーキ力の第2の制御例を示す図である。この図7に示す例は、スライドドア12の位置及び移動速度を検出する場合の例であり、横方向に時間tの経過を示し、縦方向にデューティ比Duの時間変化と、スライドドア12の移動速度であるドア速度Spの時間変化と、を並べて示したものである。
これにより、回生ブレーキ制御部55は、スライドドア12の移動速度を検出して、この移動速度が速くなりすぎることを防ぐことができる。また、回生ブレーキ制御部55は、スライドドア12が「全開位置」又は「全開位置」に到達したことを検出して、回生ブレーキの制御動作を終了することができる。
なお、図6及び図7の時刻t1〜t2の間で行われる処理が、図8のステップST1〜ST3の処理に相当する。
一方、ステップST5の処理において、終了条件が成立していないと判定された場合(ステップST5:No)、回生ブレーキ制御部55は、現在のデューティ比(Duty)が規定デューティ比(規定Duty)に到達しているか否かを判定する(ステップST6)。例えば、図6では、時刻t3において規定デューティ比Du1に到達したと判定される。
そして、ステップST7の処理においてデューティタイマがタイムアップ(計測完了)していない判定された場合(ステップST7:No)、回生ブレーキ制御部55は、ステップST5の処理に戻り、回生ブレーキ制御の終了条件が成立しているか否かを判定する(ステップST5)。
一方、ステップST9の判定処理において、終了条件が成立していないと判定された場合(ステップST9:No)、回生ブレーキ制御部55は、スライドドア12の移動速度が規定速度(図7の規定速度SP1を参照)を超えているか否かを判定する(ステップST10)。
図7に示す例では、時刻t6において、ドア速度Spが規定速度Sp1に到達し、このときのデューティ比がデューティ比Du2になる。回生ブレーキ制御部55では、この時刻t6以降、時刻t7まで、デューティ比Duを一定のデューティ比Du2に維持する。
そして、上記実施形態において、本発明のモータ制御装置41は、車両11のスライドドア12の開閉を行う電動モータ21の回転を制御するとともに、開閉中のスライドドア12を途中停止させる場合に、電動モータ21の入力端子を短絡し回生ブレーキ力を発生させてスライドドア12を途中停止させる制御部53を有するモータ制御装置41であって、制御部53は、所定の制御周期Tに占める入力端子の短絡時間の割合であるデューティ比を、スライドドア12を途中停止させてから所定の第1規定時間が経過するまでは、所定の初期デューティ比に維持し、所定の第1規定時間の経過後は、所定の制御周期Tごとに、デューティ比を初期デューティ比から徐々に低下させて回生ブレーキ力を制御する。
このような構成のモータ制御装置であれば、スライドドア12を途中停止させる場合に、電動モータ21の入力端子22u、22v、及び22wを短絡し回生ブレーキ力を発生させてスライドドア12を途中停止させる。そして、スライドドア12を途中停止させてから所定の第1規定時間が経過するまでは、所定の初期デューティ比により電動モータ21に回生ブレーキ力を発生させ、この第1規定時間の経過後は、デューティ比を初期デューティ比から徐々に低下させることにより回生ブレーキ力を徐々に弱めていく。
これにより、傾斜地で停止した車両11において、途中停止したスライドドア12が重力の作用により傾斜方向に移動する際に、このスライドドア12を滑らかに移動させることができる。
このような構成のモータ制御装置41であれば、デューティ比を徐々に低下させる際に、デューティ比が所定のデューティ閾値に到達した場合はデューティ比を低下させることを停止する。これにより、モータ制御装置41は、スライドドア12が停止位置から傾斜方向に移動する際に、スライドドア12の移動速度が速くなり過ぎることを防ぐことができる。
これにより、モータ制御装置41は、スライドドア12が「全開位置」又は「全閉位置」に到達するであろうと推定される時間を考慮して、回生ブレーキ制御を終了する時間を設定することができる。
これにより、モータ制御装置41は、デューティ比を徐々に低下させる場合に、スライドドア12の移動速度が規定速度を超えた場合にデューティ比を低下させることを停止することができる。このため、モータ制御装置41は、スライドドア12の移動速度が速くなり過ぎることを防ぐことができる。
これにより、モータ制御装置41は、スライドドア12が「全開位置」又は「全閉位置」に到達するであろうと推定される時間を考慮して、回生ブレーキ制御を終了する時間(第2規定時間)を設定することができる。また、スライドドア12が「全閉位置」又は「全開位置」に到達した場合には、回生ブレーキ制御を直ちに終了することができる。
図9は、図1に示すドア開閉装置14の制御体系の他の一例を示す説明図である。なお、図9において、図3と同じ部分には同じ符号を付し、その説明を省略する。図9に示す制御系回路部50aは、電動モータ21への印加電圧Vu、Vv、Vw(より正確には電圧と周波数)を可変制御するために、駆動回路部42のトランジスタ42a〜42fの各ゲートを駆動する駆動信号G1〜G6をパルス幅変調信号(PWM信号)として形成する。制御系回路部50aは、トランジスタ42a〜42fを高速スイッチングすることにより、直流電源44から各固定子巻線21u、21v、及び21wへ供給する印加電圧を制御する。
制御系回路部50aは、ドライバ回路51、ドア開閉情報生成部52、及び制御部53aを含んで構成される。
回転制御部54aは、方向信号Dが示す回転方向と同方向のPWM指令信号をドライバ回路51に対して出力する。なお、ROM57の制御マップは、目標速度Vcを、位置信号Pが示すスライドドア12の位置、及び方向信号Dが示すスライドドア12の移動方向に関連付けて記憶している。
電動モータ21を正転駆動する動作において、ホールIC48u、48v、48wはそれぞれパルス信号Su、Sv、及びSwとして、図10に示すようにハイ信号(H信号)またはロー信号(L信号)を出力する。ドア開閉情報生成部52は、これらの信号から回転子47の回転方向を検出し、方向信号D(位置信号パターン)として回転制御部54aに対して出力する。例えば、回転子47が回転子位置シーケンスSnのS1の回転位置にあるとき、パルス信号Su、Sv、及びSwは、それぞれH信号、L信号、H信号となる。つまり、3つのホールICで検出するので、位置信号パターンは、H−L−H(パルス信号Su、Sv、及びSwを並列に並べた信号で示す)となり、この位置信号パターンを、便宜的に位置信号パターン「A」とする。また、回転子位置シーケンスSnがS2のとき、位置信号パターンは、H−L−Lとなり、位置信号パターンは「B」となる。
つまり、回転子位置が360°回転する回転子位置シーケンスS1〜S6に対応して、ドア開閉情報生成部52が出力する方向信号D(位置信号パターン)は「A」〜「F」となる。このように、電動モータ21の回転子47が開閉スイッチ45からの設定方向である正転方向に駆動されている場合、ドア開閉情報生成部52は、回転子位置シーケンスSnのシーケンスS1〜S6に対応して方向信号D(位置信号パターンA〜F)を回転制御部54aに対して出力する。
駆動回路部42は、駆動信号G1〜G6によって、トランジスタ42a〜42fをスイッチング制御し、固定子巻線21u、21v、及び21wに、図10に示すような、印加電圧Vu、Vv、Vwを印加する。これにより、電動モータ21の回転子47は、正転に回転する。本実施態様では、図10に示すように、上述した方向信号D(位置信号パターンA〜F)に対応して、印加電圧Vu、Vv、Vwの通電パターンを便宜的に通電パターンG〜Lとする。例えば、駆動回路部42は、位置信号パターンAに対応して、(0)−(−V)−(+V)の通電パターンGを出力している。
このように、ドライバ回路51は、回転制御部54aからの電動モータ21を正転駆動するためのPWM指令信号が入力されて、トランジスタ42a〜42fを駆動する駆動信号G1〜G6をパルス幅変調(PWM)信号として出力する。また、ドライバ回路51は、回転制御部54aによってPWM信号のバルス幅(デューティ)が目標速度Vpに応じて調整される。これにより、電動モータ21の印加電圧Vu、Vv、Vwは可変制御され、電動モータ21の回転軸21aの回転速度が調整される。
正転時の回転子位置シーケンスSnの順序S1〜S6(S1→S2→S3→S4→S5→S6の順序を意味する)に対して、位置信号パターンの順序は、A〜F(A→B→C→D→E→Fの順序を意味する)となる。また、位置信号パターンに基づいて出力される通電パターンの順序は、G〜L(G→H→I→J→K→Lの順序を意味する)となる。
同様にして、図10(C)に示すように、逆転時の回転子位置シーケンスSnの順序S6〜S1(S6→S5→S4→S3→S2→S1の順序を意味する)に対して、位置信号パターンの順序は、F〜A(F→E→D→C→B→Aの順序を意味する)となる。また、位置信号パターンに基づいて出力される通電パターンの順序は、L〜G(L→K→J→I→H→Gの順序を意味する)となる。
ところで、乗員等がスライドドア12の開閉中に開閉スイッチ45を操作してスライドドア12の停止を指示すると、開閉スイッチ45は途中停止信号を出力する。制御部53aは、開閉スイッチ45から途中停止信号が入力されたら、ブレーキ制御部56により、電動モータ21を一相通電してブレーキ力を発生させ、その回転を停止させる。この一相通電は、制御部53aが、開閉スイッチ45から途中停止信号を入力されたときの位置信号パターンに対応する通電パターン(通電パターンG〜Lのうちの1つ)の出力を位置信号パターンの切り替わりに関わらず維持することにより行われる。
そして、所定の第1規定時間の経過後(例えば、10分経過後)に、ブレーキ制御部56は、デューティ比を徐々に低下させてブレーキ力を弱めることにより、スライドドア12を重力の作用する方向に徐々に移動させる。なお、上記第1所定時間は、車両11における消費電力を低減する省電力モードに移行するために予め設定される時間である。
次に、ブレーキ力の具体的な制御例について説明する。
図11は、スライドドア12を途中停止させたときのブレーキ力の第1の制御例を示す図である。この図11は、スライドドア12の位置及び移動速度を検出しない場合の例であり、横方向に時間tの経過を示し、縦方向にデューティ比Duの時間変化と、スライドドア12の移動速度であるドア速度Spの時間変化と、を並べて示したものである。
そして、この時刻t0から所定の第1規定時間(例えば、10分)が経過する時刻t2までの間、ブレーキ制御部56は、電動モータ21にデューティ比A%のブレーキ動作を行わせる。
また、図12は、スライドドア12を途中停止させたときのブレーキ力の第2の制御例を示す図である。この図12に示す例は、スライドドア12の位置及び移動速度を検出する場合の例であり、横方向に時間tの経過を示し、縦方向にデューティ比Duの時間変化と、スライドドア12の移動速度であるドア速度Spの時間変化と、を並べて示したものである。
これにより、ブレーキ制御部56は、スライドドア12の移動速度を検出して、この移動速度が速くなりすぎることを防ぐことができる。また、ブレーキ制御部56は、スライドドア12が「全開位置」又は「全開位置」に到達したことを検出して、ブレーキの一相通電制御動作を終了することができる。
回転制御部54aは、スライドドア12のドア位置が「全閉位置」または「全開位置」に到達したと判断すると(ステップST0_2―Yes)、ドライバ回路51に対して、電動モータ21の駆動を停止するためのPWM指令信号を出力する。電動モータ21への通電は終了し、スライドドア12の自動開閉動作が終了する(ステップST0_3)。
一方、ブレーキ制御部56が、スライドドア12の途中停止信号が入力されていると判断した場合(ステップST0_4:Yes)、ブレーキ制御部56は、デューティタイマを始動させる(ステップST0_5)。
ブレーキ制御部56が、スライドドア12の途中停止信号が解除されていると判断した場合(ステップST0_7:Yes)、ステップST0_2に戻り、スライドドア12のドア位置が「全閉位置」または「全開位置」にあるか否かが判断される。
一方、ステップST5の処理において、終了条件が成立していないと判定された場合(ステップST5:No)、ブレーキ制御部56は、現在のデューティ比(Duty)が規定デューティ比(規定Duty)に到達しているか否かを判定する(ステップST6)。例えば、図11では、時刻t3において規定デューティ比Du1に到達したと判定される。
そして、ステップST7の処理においてデューティタイマがタイムアップ(計測完了)していない判定された場合(ステップST7:No)、ブレーキ制御部56は、ステップST5の処理に戻り、ブレーキ制御の終了条件が成立しているか否かを判定する(ステップST5)。
一方、ステップST9の判定処理において、終了条件が成立していないと判定された場合(ステップST9:No)、ブレーキ制御部56は、スライドドア12の移動速度が規定速度(図12の規定速度SP1を参照)を超えているか否かを判定する(ステップST10)。
図12に示す例では、時刻t6において、ドア速度Spが規定速度Sp1に到達し、このときのデューティ比がデューティ比Du2になる。ブレーキ制御部56では、この時刻t6以降、時刻t7まで、デューティ比Duを一定のデューティ比Du2に維持する。
そして、上記実施形態において、本発明のモータ制御装置41は、車両11のスライドドア12の開閉を行う電動モータ21の回転を制御するとともに、スライドドア12の開閉中に途中停止信号が入力されたら電動モータ21にブレーキ力を発生させる制御を行ってスライドドア12を途中停止させる制御部53または制御部53aを有するモータ制御装置41である。制御部53または制御部53aは、スライドドア12が途中停止すると、スライドドア12を途中停止させてから所定の第1規定時間が経過するまでは、電動モータ21のブレーキ力を所定のブレーキ力に維持し、所定の第1規定時間の経過後は、所定の制御周期ごとに、所定の制御周期に占める電動モータの入力端子の短絡時間の割合であるデューティ比を所定の初期デューティ比から徐々に低下させてブレーキ力を徐々に低下させる制御を行う。
このような構成のモータ制御装置であれば、スライドドア12を途中停止させる場合に、電動モータ21のブレーキ力を所定のブレーキ力に維持してスライドドア12を途中停止させる。そして、スライドドア12を途中停止させてから所定の第1規定時間が経過するまでは、所定の初期デューティ比により電動モータ21にブレーキ力を発生させ、この第1規定時間の経過後は、デューティ比を初期デューティ比から徐々に低下させることによりブレーキ力を徐々に弱めていく。
制御部53aでは、途中停止信号が入力されたら、途中停止信号が入力されたときの回転子の位置に応じて駆動回路部42を一相通電制御することでブレーキ力を発生する。
制御部53は、途中停止信号が入力されたら、電動モータ21の入力端子を短絡し、ブレーキ力としての回生ブレーキ力を発生させる。
これにより、傾斜地で停止した車両11において、途中停止したスライドドア12が重力の作用により傾斜方向に移動する際に、このスライドドア12を滑らかに移動させることができる。
このような構成のモータ制御装置41であれば、デューティ比を徐々に低下させる際に、デューティ比が所定のデューティ閾値に到達した場合はデューティ比を低下させることを停止する。これにより、モータ制御装置41は、スライドドア12が停止位置から傾斜方向に移動する際に、スライドドア12の移動速度が速くなり過ぎることを防ぐことができる。
これにより、モータ制御装置41は、スライドドア12が「全開位置」又は「全閉位置」に到達するであろうと推定される時間を考慮して、ブレーキ制御(回生ブレーキ制御または一相通電制御)を終了する時間を設定することができる。
これにより、モータ制御装置41は、デューティ比を徐々に低下させる場合に、スライドドア12の移動速度が規定速度を超えた場合にデューティ比を低下させることを停止することができる。このため、モータ制御装置41は、スライドドア12の移動速度が速くなり過ぎることを防ぐことができる。
これにより、モータ制御装置41は、スライドドア12が「全開位置」又は「全閉位置」に到達するであろうと推定される時間を考慮して、ブレーキ制御を終了する時間(第2規定時間)を設定することができる。また、スライドドア12が「全閉位置」又は「全開位置」に到達した場合には、ブレーキ制御を直ちに終了することができる。
また、本発明のモータ制御装置は、上述の図示例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
Claims (7)
- 車両のスライドドアの開閉を行う電動モータの回転を制御するとともに、前記スライドドアの開閉中に途中停止信号が入力されたら前記電動モータにブレーキ力を発生させる制御を行って前記スライドドアを途中停止させる制御部を有するモータ制御装置であって、
前記制御部は、前記スライドドアが途中停止すると、
前記スライドドアを途中停止させてから所定の第1規定時間が経過するまでは、前記電動モータのブレーキ力を所定のブレーキ力に維持し、
前記所定の第1規定時間の経過後は、前記所定の制御周期ごとに、所定の制御周期に占める前記電動モータの入力端子の短絡時間の割合であるデューティ比を所定の初期デューティ比から徐々に低下させて前記ブレーキ力を制御する
ことを特徴とするモータ制御装置。 - 前記制御部は、
途中停止信号が入力されたら、前記途中停止信号が入力されたときの回転子の位置に応じて駆動回路を一相通電制御することでブレーキ力を発生する
ことを特徴とする請求項1に記載のモータ制御装置。 - 前記制御部は、
途中停止信号が入力されたら、前記電動モータの入力端子を短絡し、前記ブレーキ力としての回生ブレーキ力を発生させる
ことを特徴とする請求項1に記載のモータ制御装置。 - 前記制御部は、
前記デューティ比を前記初期デューティ比から徐々に低下させる際に、前記デューティ比が予め定められた所定のデューティ閾値に到達した場合は、前記デューティ比を低下させることを停止し、以降、前記所定のデューティ閾値のデューティ比により前記ブレーキ力を制御する
ことを特徴とする請求項1から請求項3いずれか一項に記載のモータ制御装置。 - 前記制御部は、
前記デューティ比を前記初期デューティ比から徐々に低下させる制御を開始した後、所定の第2規定時間が経過した場合に、前記電動モータに回生ブレーキ力を発生させることを終了させる
ことを特徴とする請求項4に記載のモータ制御装置。 - 前記スライドドアの位置と移動速度を検出するドア開閉情報生成部を備え、
前記制御部は、
前記デューティ比を前記初期デューティ比から徐々に低下させる制御を開始した後、前記スライドドアの移動速度が予め定められた規定速度を超えた場合に、前記デューティ比を低下させることを停止する
ことを特徴とする請求項4に記載のモータ制御装置。 - 前記スライドドアの位置と移動速度とを検出するドア開閉情報生成部を備え、
前記制御部は、
前記デューティ比を前記初期デューティ比から徐々に低下させる制御を開始した後、前記所定の第2規定時間が経過した場合と、
前記スライドドアの全開位置を検出した場合と、
前記スライドドアの全閉位置を検出した場合と、
のいずれかの場合が生じた際に、前記電動モータに回生ブレーキ力を発生させることを終了させる
ことを特徴とする請求項5に記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014032242A JP6132784B2 (ja) | 2013-02-28 | 2014-02-21 | モータ制御装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013038667 | 2013-02-28 | ||
| JP2013038667 | 2013-02-28 | ||
| JP2014032242A JP6132784B2 (ja) | 2013-02-28 | 2014-02-21 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014194151A true JP2014194151A (ja) | 2014-10-09 |
| JP2014194151A5 JP2014194151A5 (ja) | 2016-01-07 |
| JP6132784B2 JP6132784B2 (ja) | 2017-05-24 |
Family
ID=51839553
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014032242A Active JP6132784B2 (ja) | 2013-02-28 | 2014-02-21 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6132784B2 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101639695B1 (ko) * | 2015-02-11 | 2016-07-14 | 공주대학교 산학협력단 | 브러시리스 직류 전동기를 이용한 자동문 제어 장치 및 방법 |
| KR20160136018A (ko) * | 2015-05-19 | 2016-11-29 | 공주대학교 산학협력단 | 브러시리스 직류 전동기를 이용한 자동문 제어 장치 및 방법 |
| JP2017036602A (ja) * | 2015-08-10 | 2017-02-16 | 三井金属アクト株式会社 | ドア開閉装置 |
| JP2017057645A (ja) * | 2015-09-17 | 2017-03-23 | アイシン精機株式会社 | 車両用開閉体制御装置 |
| JP2017082421A (ja) * | 2015-10-23 | 2017-05-18 | 株式会社ミツバ | モータ制御装置 |
| JP2018107960A (ja) * | 2016-12-27 | 2018-07-05 | 株式会社ミツバ | モータ制御装置 |
| JP2018105024A (ja) * | 2016-12-27 | 2018-07-05 | ダイハツ工業株式会社 | 電動スライドドアのモータ制御装置 |
| JP2018119332A (ja) * | 2017-01-26 | 2018-08-02 | 株式会社ミツバ | モータ制御装置 |
| US20180266160A1 (en) * | 2017-03-17 | 2018-09-20 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| CN108625714A (zh) * | 2017-03-17 | 2018-10-09 | 爱信精机株式会社 | 车辆用开闭体控制装置 |
| JP2018159196A (ja) * | 2017-03-22 | 2018-10-11 | アイシン精機株式会社 | 車両用開閉体制御装置 |
| JP2018159195A (ja) * | 2017-03-22 | 2018-10-11 | アイシン精機株式会社 | 車両用開閉体制御装置及びモータ制御装置 |
| CN106142020B (zh) * | 2015-04-08 | 2019-01-04 | 南京德朔实业有限公司 | 利用扳机开关控制电机的方法 |
| JP2019157623A (ja) * | 2019-05-13 | 2019-09-19 | 株式会社ミツバ | 開閉体制御装置 |
| US10683690B2 (en) | 2017-03-17 | 2020-06-16 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| JP2020190190A (ja) * | 2017-01-26 | 2020-11-26 | 株式会社ミツバ | モータ制御装置およびドア開閉装置 |
| JP2021192581A (ja) * | 2020-07-22 | 2021-12-16 | 株式会社ミツバ | モータ制御装置およびドア開閉装置 |
| JP2022157703A (ja) * | 2021-03-31 | 2022-10-14 | 株式会社ユーシン | 車両用開閉体制御装置 |
| CN117188901A (zh) * | 2022-05-31 | 2023-12-08 | 比亚迪股份有限公司 | 车辆的滑动门、控制方法及车辆 |
| US12291918B2 (en) | 2021-08-04 | 2025-05-06 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Control device, control method, and storage medium |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0970195A (ja) * | 1995-08-31 | 1997-03-11 | Toyota Motor Corp | モータの制御装置 |
| JPH10266691A (ja) * | 1997-03-21 | 1998-10-06 | Mitsuba Corp | オートスライドドア装置 |
| JP2001280002A (ja) * | 2000-03-30 | 2001-10-10 | Oi Seisakusho Co Ltd | 車両用開閉体の自動開閉装置 |
| JP2005194767A (ja) * | 2004-01-07 | 2005-07-21 | Mitsuba Corp | 車両用開閉体の制御方法 |
| JP2005248434A (ja) * | 2004-03-01 | 2005-09-15 | Mitsuba Corp | 車両用スライドドア装置 |
| JP2006097407A (ja) * | 2004-09-30 | 2006-04-13 | Mitsuba Corp | 車両用自動開閉装置 |
-
2014
- 2014-02-21 JP JP2014032242A patent/JP6132784B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0970195A (ja) * | 1995-08-31 | 1997-03-11 | Toyota Motor Corp | モータの制御装置 |
| JPH10266691A (ja) * | 1997-03-21 | 1998-10-06 | Mitsuba Corp | オートスライドドア装置 |
| JP2001280002A (ja) * | 2000-03-30 | 2001-10-10 | Oi Seisakusho Co Ltd | 車両用開閉体の自動開閉装置 |
| JP2005194767A (ja) * | 2004-01-07 | 2005-07-21 | Mitsuba Corp | 車両用開閉体の制御方法 |
| JP2005248434A (ja) * | 2004-03-01 | 2005-09-15 | Mitsuba Corp | 車両用スライドドア装置 |
| JP2006097407A (ja) * | 2004-09-30 | 2006-04-13 | Mitsuba Corp | 車両用自動開閉装置 |
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101639695B1 (ko) * | 2015-02-11 | 2016-07-14 | 공주대학교 산학협력단 | 브러시리스 직류 전동기를 이용한 자동문 제어 장치 및 방법 |
| CN106142020B (zh) * | 2015-04-08 | 2019-01-04 | 南京德朔实业有限公司 | 利用扳机开关控制电机的方法 |
| KR20160136018A (ko) * | 2015-05-19 | 2016-11-29 | 공주대학교 산학협력단 | 브러시리스 직류 전동기를 이용한 자동문 제어 장치 및 방법 |
| KR101690188B1 (ko) | 2015-05-19 | 2016-12-27 | 공주대학교 산학협력단 | 브러시리스 직류 전동기를 이용한 자동문 제어 장치 및 방법 |
| JP2017036602A (ja) * | 2015-08-10 | 2017-02-16 | 三井金属アクト株式会社 | ドア開閉装置 |
| JP2017057645A (ja) * | 2015-09-17 | 2017-03-23 | アイシン精機株式会社 | 車両用開閉体制御装置 |
| JP2017082421A (ja) * | 2015-10-23 | 2017-05-18 | 株式会社ミツバ | モータ制御装置 |
| CN108258969B (zh) * | 2016-12-27 | 2021-11-02 | 株式会社美姿把 | 马达控制装置 |
| JP2018105024A (ja) * | 2016-12-27 | 2018-07-05 | ダイハツ工業株式会社 | 電動スライドドアのモータ制御装置 |
| US11233467B2 (en) | 2016-12-27 | 2022-01-25 | Mitsuba Corporation | Motor control device |
| JP2018107960A (ja) * | 2016-12-27 | 2018-07-05 | 株式会社ミツバ | モータ制御装置 |
| CN108258969A (zh) * | 2016-12-27 | 2018-07-06 | 株式会社美姿把 | 马达控制装置 |
| JP2020190190A (ja) * | 2017-01-26 | 2020-11-26 | 株式会社ミツバ | モータ制御装置およびドア開閉装置 |
| JP2018119332A (ja) * | 2017-01-26 | 2018-08-02 | 株式会社ミツバ | モータ制御装置 |
| US10934759B2 (en) | 2017-03-17 | 2021-03-02 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| US20180266160A1 (en) * | 2017-03-17 | 2018-09-20 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| CN108625713B (zh) * | 2017-03-17 | 2021-07-16 | 爱信精机株式会社 | 车辆用开闭体控制装置 |
| US10683690B2 (en) | 2017-03-17 | 2020-06-16 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| CN108625714B (zh) * | 2017-03-17 | 2021-07-13 | 爱信精机株式会社 | 车辆用开闭体控制装置 |
| US10794105B2 (en) | 2017-03-17 | 2020-10-06 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device |
| CN108625714A (zh) * | 2017-03-17 | 2018-10-09 | 爱信精机株式会社 | 车辆用开闭体控制装置 |
| CN108625713A (zh) * | 2017-03-17 | 2018-10-09 | 爱信精机株式会社 | 车辆用开闭体控制装置 |
| JP2018159196A (ja) * | 2017-03-22 | 2018-10-11 | アイシン精機株式会社 | 車両用開閉体制御装置 |
| US10787065B2 (en) | 2017-03-22 | 2020-09-29 | Aisin Seiki Kabushiki Kaisha | Vehicular opening/closing body control device and motor control device |
| JP2018159195A (ja) * | 2017-03-22 | 2018-10-11 | アイシン精機株式会社 | 車両用開閉体制御装置及びモータ制御装置 |
| JP2019157623A (ja) * | 2019-05-13 | 2019-09-19 | 株式会社ミツバ | 開閉体制御装置 |
| JP2021192581A (ja) * | 2020-07-22 | 2021-12-16 | 株式会社ミツバ | モータ制御装置およびドア開閉装置 |
| JP7197650B2 (ja) | 2020-07-22 | 2022-12-27 | 株式会社ミツバ | モータ制御装置およびドア開閉装置 |
| JP2022157703A (ja) * | 2021-03-31 | 2022-10-14 | 株式会社ユーシン | 車両用開閉体制御装置 |
| JP7791656B2 (ja) | 2021-03-31 | 2025-12-24 | 株式会社ユーシン | 車両用開閉体制御装置 |
| US12291918B2 (en) | 2021-08-04 | 2025-05-06 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Control device, control method, and storage medium |
| CN117188901A (zh) * | 2022-05-31 | 2023-12-08 | 比亚迪股份有限公司 | 车辆的滑动门、控制方法及车辆 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6132784B2 (ja) | 2017-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6132784B2 (ja) | モータ制御装置 | |
| JP6068956B2 (ja) | モータ制御装置 | |
| JP6711746B2 (ja) | モータ制御装置 | |
| US11226037B2 (en) | Shift range control device | |
| US11002360B2 (en) | Shift range control apparatus | |
| JP6658416B2 (ja) | シフトレンジ制御装置 | |
| US10787065B2 (en) | Vehicular opening/closing body control device and motor control device | |
| JP2016208633A (ja) | モータ駆動装置 | |
| JP6643862B2 (ja) | モータ制御装置 | |
| US20170244350A1 (en) | Motor control system and method | |
| JP2019118241A (ja) | モータ制御装置 | |
| JP2008005656A (ja) | 車両用自動開閉装置 | |
| JP7197650B2 (ja) | モータ制御装置およびドア開閉装置 | |
| JP6928156B2 (ja) | モータ制御装置およびドア開閉装置 | |
| JP2008005683A (ja) | ブラシレスdcモータの駆動装置 | |
| JP6741606B2 (ja) | モータ制御装置 | |
| JP6036087B2 (ja) | ロボットシステム | |
| JP7197426B2 (ja) | モータ制御装置 | |
| JP6529444B2 (ja) | 開閉体制御装置 | |
| JP2017132387A (ja) | 車両シート制御装置 | |
| JP2006333691A (ja) | モータ制御装置 | |
| JP2012130178A (ja) | 電動ポンプ用ブラシレスモータの制御装置 | |
| JP2021083271A (ja) | モータ駆動装置、モータ駆動システムおよびモータ駆動方法 | |
| JP2019157623A (ja) | 開閉体制御装置 | |
| JP2021115915A (ja) | 車両用開閉体制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151112 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161020 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170321 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170418 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6132784 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |