以下、本発明の実施の形態を図面に基づいて説明する。
(第1実施形態)
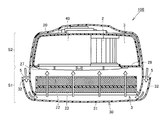
図1,2,3に、本発明の第1実施形態の空気清浄機100を示す。空気清浄機100は、本発明に従った空気調和機の一例である。図1は、空気清浄機100を前面側から見た斜視図である。図2は、空気清浄機100を背面側から見た斜視図である。図3は、空気清浄機100の平面図である。空気清浄機100は、室内等の床に置かれたうえで使用される据え置き型の空気清浄機である。
図1に示すように、空気清浄機100は、本体ケーシング20と、前面パネル30とを備えている。主に本体ケーシング20と前面パネル30とによって、空気清浄機100の外形が形成される。本体ケーシング20は、縦長の直方体形状を有している。本体ケーシング20には、空気の調和の一例としての空気の清浄化に必要な部品のうちの主要な部品が収容される。なお、後述するように、本体ケーシング20の前方側は開口している。本体ケーシング20の下部には、脚部33が接続されている。脚部33は、空気清浄機100が直立した状態で空気清浄機100を床面等に置くことができるように構成されている。
前面パネル30は、本体ケーシング20の前面および側面の一部を覆うように本体ケーシング20に着脱自在に取付けられる。前面パネル30は、主面部31と側面部32とを有する。主面部31は、略鉛直方向に延びる面によって形成されている。主面部31は、空気清浄機100の正面に配置されている。側面部32は、空気清浄機100の左右方向における主面部31の端部から後方に向かって延びている。側面部32は、空気清浄機100の左右の両側面に設けられている。側面部32も、略鉛直方向に延びる面によって形成されている。
前面パネル30が本体ケーシング20に取り付けられることによって、本体ケーシング20に収容された部品が発生させる作動音が空気清浄機100の外部に漏れ出すことを遮蔽することができる。また、本体ケーシング20に収容された部品を隠すことができるので、空気清浄機100の美観が損なわれることを防止できる。
前面パネル30の上部には、人体センサー50が設置されている。人体センサー50は、空気清浄機100が管理する領域に使用者等の人体を含む生体が存在することを検知する。人体センサー50には、生体が発する赤外線を検出する赤外線焦電センサー、または、音声を検出もしくは測定するマイクロフォン等を利用することができる。あるいは、生体の存在を直接的に検出する代わりに、照度を検出する照度センサーが人体センサー50に利用されていてもよい。
図2に示すように、空気清浄機100および本体ケーシング20の背面には、把手部24が設けられている。把手部24は、本体ケーシング20の背面に開口が形成されるように、当該背面の一部が空気清浄機100の内部に入り込むことによって形成される。空気清浄機100の使用者は、把手部24を用いることによって、空気清浄機100を持ち上げながら搬送することができる。
本体ケーシング20の側面と前面パネル30の側面部32との間には、隙間が設けられている。この隙間は、吸込口5を構成する。吸込口5は、空気清浄機100の外部の空気を空気清浄機100の内部に導入するための開口部である。また、本体ケーシング20の一方の側面において、吸込口5の近傍には開口部26が形成されている。本体ケーシング20の内部において、開口部26に対向する位置には粒子センサー60が配置されている。粒子センサー60には、空気清浄機100の外部の空気が開口部26を通って導入される。
本体ケーシング20の上部には、吹出口4が設けられている。吹出口4は、吹出口4aと吹出口4bとを含む。吸込口5を通って空気清浄機100の内部に導入された空気は、空気清浄機100の内部において清浄される。清浄化された空気は、吹出口4を通って空気清浄機100の外部に吹き出される。
図3に示すように、本体ケーシング20の上面には、上面パネル部21が設けられている。上面パネル部21は、各種操作ボタンによって構成された操作部と、LED(Light Emitting diode)等の発光部材によって構成された表示部200とを含む。例えば、操作部は、電源ボタン201と、タイマボタン202と、イオンスイッチボタン203と、風量切換ボタン204等を含む。電源ボタン201は、空気清浄機100の運転を開始または停止させるためのものである。タイマボタン202は、空気清浄機100のタイマ運転を設定するためのものである。イオンスイッチボタン203は、後述するイオン発生器によるイオンの発生を指示するためのものである。風量切換ボタン204は、後述するシロッコファンによる送風量を設定するためのものである。
表示部200は、空気清浄機100の各種運転モード、人体センサー50(図1参照)による検知に基づいた情報、粒子センサー60(図2参照)の作動と検知とに基づいた情報、後述するイオン発生器の作動の状態、および、後述するシロッコファンによる送風量等を表示するように構成されている。
次に、空気清浄機100の内部の構造について、図4〜9を用いて説明する。図4は、空気清浄機100の縦断面図である。図5は、空気清浄機100の略水平方向の断面図であって、図2のV−V線の断面図である。図6は、空気清浄機100を部分的に破断した背面図であって、空気清浄機100の背面側の構成としての送風通路3を含む構成を示す図である。図7は、空気清浄機100の分解斜視図の一部であって、送風通路3の構成を示す図である。図8は、空気清浄機100の分解斜視図の一部であって、イオン発生器10を示す図である。図9は、イオン発生器10の斜視図である。
図4に示すように、本体ケーシング20の内部には、仕切壁29が配置されている。仕切壁29は、本体ケーシング20によって形成される空間を、前面パネル30が位置する側の前方空間S1と、背面側の後方空間S2とに区画する。前方空間S1は、本体ケーシング20の側方において吸込口5を介して空気清浄機100の外部と連通する。後方空間S2には、シロッコファン2が配置される。仕切壁29と前面パネル30との間には、高機能フィルタ23が配置される。高機能フィルタ23は、例えば、脱臭用のフィルタと、ホルムアルデヒドを吸着させるフィルタと、制菌および集塵のためのフィルタとの三つで構成される。
本体ケーシング20の前面側には、背面側に向かって窪んだ凹部22が形成されている。凹部22の上端は、水平方向に沿って、吹出口4aの位置と略同一の位置に配置される。凹部22の下端は、シロッコファン2の下端よりも下方であって、水平方向に沿って本体ケーシング20の下端の位置の近傍に配置される。凹部22の前端は、本体ケーシング20の開口の縁を形成する。この開口の前方は、前面パネル30によって塞がれる。高機能フィルタ23は、凹部22に収容されるように取り付けられる。高機能フィルタ23によって、前方空間S1は前後方向(図4の左右方向)に二つに分割される。
シロッコファン2は、空気清浄機100の上下方向に沿った中心よりも下方に配置される。シロッコファン2よりも後方には、モータ9が配置されている。シロッコファン2は、モータ9に連結されているため、モータ9の回転によって駆動する。
仕切壁29には、連通孔27が形成されている。連通孔27は、空気清浄機100の上下方向に沿って、仕切壁29の中心よりも下方に位置する。シロッコファン2における吸い込み側の面は、連通孔27に面する。仕切壁29の背面側には、シロッコファン2を覆うようにファンカバー40が取付けられている。ファンカバー40と仕切壁29とによって、送風通路3の一部が構成される。送風通路3は、吹出口4に連通している。図5に示すように、送風通路3の別の一部は、シロッコファン2の上流に位置する部分として、前面パネル30と仕切壁29とによって囲まれる空間を含む。側面部32と本体ケーシング20の側面とに挟まれる部分も送風通路3に含まれる。
図4に示すように、仕切壁29における連通孔27よりも上方には、イオン発生器10が取り付けられる。イオン発生器10は、送風通路3のうちのシロッコファン2の下流において、流通する空気にイオンを含ませることができるように仕切壁29に取り付けられる。イオン発生器10から発生するイオンは、後述するように、シロッコファン2が送出する空気の流れに乗って空気清浄機100の外部に放出される。
仕切壁29とファンカバー40とによって囲まれた空間が、後方空間S2における送風通路3として構成される。図6に示すように、ファンカバー40は、端板部41と、側板部42,43,44とによって構成される。ファンカバー40は、空気清浄機100の前後方向に沿って端板部41が仕切壁29に対向するように、仕切壁29に固定される。端板部41は、略鉛直方向に延びる表面を有している。側板部42,43,44は、ファンカバー40の側面部として、ファンカバー40が仕切壁29に取付けられた状態において空気清浄機100の前後方向に沿って延びている。
図7に示すように、ファンカバー40が仕切壁29に取付けられた状態において、端板部41と仕切壁29とは、一対の端面部として、シロッコファン2の回転軸線(図示せず)に沿って、つまり、空気清浄機100の前後方向(図4の左右方向)に沿って側板部42,43,44を挟み込む。図6に示すように、側板部42は、シロッコファン2の外周に沿ってシロッコファン2の右側の一部と下方と左側と上側の一部とを囲むように、略円弧形状を有する。側板部43は、所定の接線が延びる方向に略平行な方向に沿って、側板部42の当該一端から上方に延びる。所定の接線とは、側板部42の一端とシロッコファン2の回転軸線とを結ぶ線(図示せず)が通るシロッコファン2の外周の一点における接線である。側板部44は、側板部43と対向する。また、側板部44は、側板部42の他端から上方に向かって側板部43から遠ざかるように延びる。側板部43には、側板部44の側に向かって傾斜する偏向部45が形成されている。偏向部45によって、側板部43の表面が延びる方向に沿って流れる空気に、側板部44の側に向かって流れる成分を含ませることができる。
図7に示すように、吹出口4aは、仕切壁29と側板部43,44と端板部41とに囲まれるようにファンカバー40と仕切壁29とによって形成される開口部であって、側板部43の上端と側板部44の上端と端板部41の上端とに位置する。吹出口4bは、吹出口4aの上方に配置されている。仕切壁29には、半円筒形状を有する囲い壁28が固定されている。囲い壁28の上端は、吹出口4aよりも上方に位置する。囲い壁28の下端は、吹出口4aよりも下方に位置する。囲い壁28の左右の両側と背面側とは、ファンカバー40に囲まれている。囲い壁28の下方且つシロッコファン2の上方には、イオン発生器10が配置されている。イオン発生器10は、仕切壁29に取り付けられる。
図8に示すように、イオン発生器10は、押え具130を用いて仕切壁29に取り付けられる。図9に示すように、イオン発生器10は、筐体13と、正イオンを発生させる放電電極11と、負イオンを発生させる放電電極12とを有する。筐体13には、放電電極11と放電電極12とを含むイオン発生素子(図示せず)が収容される。イオン発生素子は、針状の放電電極11,12が図示しない基板に設置された構成を有する。筐体13には、円形状を有するイオン放出用の孔14,15が形成されている。筐体13の表面において、孔14は、放電電極11の先端に対向する位置に形成され、孔15は、放電電極12の先端に対向する位置に形成されている。筐体13の内部において、孔14,15の縁の近傍には、板状の誘導電極(図示せず)がそれぞれ形成されている。また、筐体13の内部には、イオン発生素子を駆動するための回路および昇圧コイル等が配置される。
図8に示すように、イオン発生器10は、押え具130が仕切壁29に固定されることによって仕切壁29に取り付けられる。このとき、放電電極11と放電電極12とは、送出される空気が流れる方向(白抜きの矢印が示す方向)と交差する方向に沿って並んでいる。押え具130は、放電電極11と放電電極12とを露出させるための開口部131,132と、傾斜部133とを有する。傾斜部133は、押え具130が仕切壁29に固定されるときに、仕切壁29に対して傾斜する面部である。開口部131,132は、傾斜部133に形成されている。仕切壁29に対する傾斜部133の傾斜が利用されることによって、イオン発生器10は、放電電極11の先端と放電電極12の先端とが斜め鉛直下方を指すように、仕切壁29に取り付けられる。この状態において、イオン発生器10の孔14,15は、押え具130の開口部131,132に対向する。
本実施形態で使用するイオン発生器10においては、放電電極と誘導電極との間に高圧電気を印加することによって、放電が発生し、空気中の酸素または水蒸気がエネルギーを受けてイオン化し、正イオンH+(H2O)m(mは任意の自然数)と負イオンO2 -(H2O)n(nは任意の自然数)を主体としたイオンが生成される。生成したイオンは、シロッコファン2で発生した風によって吹出口4から室内に放出される。放出されたこれらの正イオンH+(H2O)mおよび負イオンO2 -(H2O)nは、空気中に浮遊する浮遊細菌を取り囲んで、その表面に付着し、化学反応して活性種である過酸化水素H2O2または水酸基ラジカル・OHを生成する。過酸化水素H2O2または水酸基ラジカル・OHは、極めて強力な活性を示すため、空気中の浮遊菌を殺菌することができる。
上述の正イオンと負イオンは、浮遊細菌の細胞表面で式(1)〜式(3)に示すように化学反応を起こして、活性種である過酸化水素H2O2または水酸基ラジカル・OHが生成される。
H+(H2O)m+O2 -(H2O)n →・OH+1/2O2+(m+n)H2O … (1)H+(H2O)m+H+(H2O)m'+O2 -(H2O)n+O2 -(H2O)n' →
2・OH+O2+(m+m'+n+n')H2O … (2)
H+(H2O)m+H+(H2O)m'+O2 -(H2O)n+O2 -(H2O)n' →
H2O2+O2+(m+m'+n+n')H2O … (3)
ここで、式(1)〜式(3)において、m、m'、n、n'は任意の自然数である。発生した活性種の作用によって浮遊細菌の細胞膜が破壊される。したがって、空気中に浮遊する浮遊細菌が効率的に殺菌され、これを無害化することができる。
空気清浄機100(図4参照)においては、以上のメカニズムによって、浮遊菌の殺菌効果を得ることができる。また、上記式(1)〜式(3)は、空気中の有害物質表面でも同様の作用を生じさせることができるため、活性種である過酸化水素H2O2または水酸基ラジカル・OHが、有害物質を酸化もしくは分解することにより、ホルムアルデヒドまたはアンモニア等の化学物質を、二酸化炭素、水、または、窒素等の無害な物質に変換することができる。また、正イオンと負イオンとの反応によって、臭いの元となる分子を分解する働きがあることも確かめられており、室内の脱臭にも利用することができる。この他、上記の正イオンと負イオンとには、コクサッキーウイルスまたはポリオウイルス等のウイルス類も不活化する働きがあり、これらウイルス類の混入による汚染が防止できる。
図4に示すように、吹出口4のうちの吹出口4aは、ファンカバー40の端板部41の側(空気清浄機100の前後方向の後側)に配置され、且つ、吹出口4bは、吹出口4aに対して、イオン発生器10が取付けられた仕切壁29の側(空気清浄機100の前後方向の前側)に配置されている。特に、吹出口4aは、吹出口4bの側方と後方(背面側)とを取り囲むように形成されている。また、吹出口4には、送出される空気が流れる方向を調整するためのルーバ6a,6b,6cが設けられている。ルーバ6aは、吹出口4aに配置されている。ルーバ6b、6cは、吹出口4bに配置されている。ルーバ6a,6b,6cは、送風通路3に、異物が侵入すること、または、使用者の手もしくは指等が誤って差し込まれることを防止するといった故障防止および安全対策を図る機能も有する。
図7に示すように、吹出口4の幅(言い換えると、モータ軸91(図4参照)が延びる方向と略直交する方向に沿った吹出口4aの寸法)Wは、シロッコファン2の直径Dよりも大きい。吹出口4bを形成する囲い壁28は、吹出口4aの中心部を通るように仕切壁29に固定されている。イオン発生器10は、吹出口4bの下方に配置されている。そのため、イオン発生器10によって発生したイオンを含んだ空気は、主に吹出口4bに導かれる。したがって、吹出口4bからは、イオンの濃度が相対的に高い空気が吹き出される。一方、吹出口4aからは、イオンの濃度が相対的に低い空気が吹き出される。
続いて、空気清浄機100における空気の流れについて説明する。図4に示すように、モータ9の回転を受けたシロッコファン2が駆動することにより、本体ケーシング20の前方空間S1において負圧が生じる。図5に示すように、この負圧に基づいて、空気清浄機100の外部の空気が吸込口5を通って前方空間S1に流入する。前方空間S1に流入する空気は、高機能フィルタ23を通過する際に、脱臭処理と、ホルムアルデヒドの吸着処理と、除塵処理および制菌処理とが施される。これらの処理が施されたうえで、空気は連通孔27を通過する。
連通孔27を通過した空気は、図6に示すようにシロッコファン2の周面から半径方向の外方に向かって吹き出される。吹き出された空気は、送風通路3を通りながら吹出口4にまで導かれる。このとき、イオン発生器10において発生するイオンが空気に混合される。イオンを含む空気は、吹出口4から空気清浄機100の外部に吹き出される。吹出口4のうち、吹出口4aからは、吹出口4bから吹き出される空気の側方と後方とを覆うように空気が吹き出される。上記のように、吹出口4bからは、イオンの濃度が相対的に高い空気が吹き出される。また、吹出口4aからは、イオンの濃度が相対的に低い空気が吹き出される。そのため、空気清浄機100の外部に吹き出されたイオンの濃度が高い空気が壁等に直ちに衝突することを抑制することができる。このように、吹出口4a,4bを含む空気清浄機100の内部の構成によれば、対象の空間にイオンをより均一に放出することができる。なお、図4,5,6においては、このような一連の空気の流れについて、白抜きの矢印で示す。
なお、イオン発生器10は、空気中における放電を利用している。そのため、放電電極11,12(図9参照)に印加される電圧が高いほど、発生するイオンの量が増加する。発生するイオンの量は、電圧の低下に基づいて減少する。また、放電電極11,12を流通する空気の量が多いほど、搬送されるイオンの量が増加するため、送出されるイオンの量が結果的に増加する。一方、放電電極11,12を流通する空気の量が低減する場合には、搬送されるイオンの量が減少することによって、送出されるイオンの量が減少する。また、放電電極11,12を流通する空気の流速が速いほど、単位時間あたりに搬送および送出されるイオンの量は増加する。空気の流速が低下する場合には、単位時間あたりに搬送および送出されるイオンの量が減少する。
次に、粒子センサー60を含む制御関連の構成と、浮遊する生物由来の粒子を検出するための粒子センサー60の構成について説明する。なお、生物由来の粒子とは、微生物、もしくはカビ等の菌、または、花粉を含む生物に由来する粒子である。鉱物または石油精製品等の粉塵は、生物由来の粒子に含まれない。
図10は、本発明に従った空気調和機の一例の制御に係る制御ブロック図である。図11は、塵埃センサーの一例としての粒子センサー60の模式図であって、粒子センサー60の原理を示す図である。なお、粒子センサー60としては、空気中を浮遊する物質を検出するセンサーのうちの公知のものを利用することができる。
図10に示すように、制御部80は、モータ9とイオン発生器10と粒子センサー60と表示部200とを制御する。なお、制御部80は、空気清浄機100(図1参照)の図示しない中央演算処理装置(CPU:Central Processing Unit)に含まれる構成であって、このCPUは、必要な制御用の回路および基板とともに空気清浄機100の内部に配置されている。
制御部80には、電源ボタン201、タイマボタン202、イオンスイッチボタン203、および、風量切換ボタン204に接続される回路が含まれる。電源ボタン201の操作に基づいて、空気清浄機100の運転の開始と停止とが切り替えられる。つまり、モータ9の回転の開始と停止とが切り替えられる。タイマボタン202の操作に基づいて、タイマ運転が実施される。イオンスイッチボタン203の操作に基づいて、イオン発生器10におけるイオンの発生の開始と停止とが切り替えられ、且つ、発生されるイオンの量が調整される。また、風量切換ボタン204の操作に基づいて、モータ9の回転数が調整される。
また、人体センサー50と粒子センサー60とは、測定または検出に基づく信号を制御部80に出力する。制御部80は、人体センサー50から出力される信号に基づいて、人の存在を検知する。また、制御部80は、粒子センサー60の検出に基づいて浮遊物質としての生物由来の粒子の量を検知する。さらに、制御部80は、上面パネル部21における操作と、人体センサー50と粒子センサー60とから出力される信号と、検知の結果とに基づいて、モータ9とイオン発生器10と粒子センサー60とを制御する。表示部200は、これらの制御に関する情報を、上記のように上面パネル部21(図3参照)において表示する。これらの制御に関する情報としては、粒子センサー60の作動に関する情報と、粒子センサー60によって検出される粒子の量に関する情報とが含まれる。なお、制御において必要な判定は、制御部80を含むCPUにおいて実行される。
図11に示すように、粒子センサー60においては、捕集基板61上に捕集された生物由来の粒子601と化学繊維等の粒子602との混在粒子600に向けて、発光素子63から光が照射される。混在粒子600からは、光の照射によって励起された蛍光が発せられる。発光した蛍光は、レンズ64で集光されたうえで受光素子65によって受光される。
粒子センサー60において粒子を検出するための行程としては、周辺空気を導入することによって混在粒子600を捕集する行程(捕集行程)と、加熱前の混在粒子600の蛍光の量(または光度)を測定する行程(第1測定行程)と、混在粒子600を加熱する行程(加熱行程)と、加熱後の混在粒子600の蛍光の量(または光度)を測定する行程(第2測定行程)と、捕集基板61を清掃し、且つ、蛍光の量(または光度)の測定の結果に基づいて生物由来の粒子601の量を算出する行程(清掃および演算行程)とを含む複数の行程が実行される。なお、捕集基板61の下面に取り付けられたヒータ62が、捕集基板61を介して混在粒子600を加熱する。
捕集行程においては、空気中を浮遊する混在粒子600を、捕集用に形成した電界によって静電帯電させる。帯電した混在粒子600は、捕集基板61に捕集される。捕集行程において、捕集基板61は、別途設けた静電針(図示せず)に対向するように配置される。捕集基板61および上記静電針は、別途設けた直流電源(図示せず)に接続される。例えば、上記静電針(図示せず)に上記直流電源の正極を接続し、捕集基板61に上記直流電源の負極を接続する。捕集基板61と上記静電針との間には、電位差を生じさせる。
粒子センサー60の外部からは、別途設けられたファン(図示せず)の駆動によって混在粒子600を含む空気が内部に導入される。粒子センサー60内部に導入される空気は、上記静電針の周囲を通過したうえで捕集基板61に向かう。粒子センサー60の内部を浮遊する混在粒子600は、上記静電針の周囲において正の電荷に帯電する。帯電した混在粒子600は、静電気力によって捕集基板61の表面に付着する。
捕集された粒子に含まれる微生物等を検出するために、捕集基板61に発光素子63から特定範囲の波長を有する光を照射する。照射される光によって励起された蛍光が混在粒子600から発せられる。発せられた蛍光は、レンズ64で集光された後に、受光素子65において受光される。受光される光の量(または光度)が、制御に必要な蛍光の量(または光度)として測定される。このような蛍光の量(または光度)は、混在粒子600を捕集した直後と、混在粒子600を加熱して再び冷却した後の2回測定される。生物由来の粒子601の量は、加熱前後の測定の結果を比較することによって算出される。また、加熱行程の前に混在粒子600が発した蛍光の量(または光度)を、予め取得したデータと比較することによって、粒子センサー60の内部に導入される混在粒子600の量を算出することができる。
粒子センサー60と制御部80(図10参照)とは、上記の一連の行程を繰り返すことによって、連続的にまたは間欠的に同様の測定(または検出)を繰り返すことが可能であるように構成されている。つまり、粒子センサー60は、浮遊物質としての混在粒子600を捕集する第1の行程の一例としての捕集行程と、第2の行程の一例としての第1測定行程と加熱行程と第2測定行程と清掃および演算行程とを含む生物由来の粒子601の量を検出する行程とを、繰り返して実行するように構成されている。
なお、測定(または検出)が終了した際に、または、定期的に、混在粒子600が捕集基板61から除去されるように、別途設けられた清掃部(図示せず)によって捕集基板61の表面が清掃される。上記清掃部は、例えば、ブラシ、ブラシ押さえおよびブラシ固定部を含む。
上記ブラシは、繊維集合体から形成されている。繊維集合体としては、導電性を有する繊維を含むことが好ましい。導電性を有するブラシを用いることにより、帯電した混在粒子600の電荷を除去することができる。また、上記ブラシは、導電性を有する板状の物体に置き換えることも可能である。また、一般的なまたは公知の構造によって上記清掃部を構成することができる。
このような構成により、制御部80と粒子センサー60とは、空気中を浮遊する粒子の量と、当該粒子に含まれる生物由来の粒子の量との両方を検知し、これらの量をデータ化することができる。粒子センサー60とは異なり、一般的な埃センサーは、空気中の浮遊物を光散乱効果によって検出するので、埃全体の濃度を把握できるとしても、浮遊する微生物の濃度だけを取り出して検出することはできない。すなわち、粒子センサー60は、埃センサーおよび微生物センサーの働きを兼ねることが可能である。
続いて、粒子センサー60と人体センサー50と制御部80とを含む構成を備えた本発明に従った空気清浄機において実行される制御の一例について、図12〜14を用いて説明する。図12は、本発明に従った空気調和機の一例において実行される制御の一例のフローチャートである。図13は、本発明に従った空気調和機の一例において実行される制御の一例のうち、粒子センサー60(図10参照)に対して実行される制御の一例のフローチャートである。図14は、本発明に従った空気調和機の一例において実行される制御の一例のうち、当該空気調和機に対して実行される制御の一例のフローチャートである。
図12に示すように、ステップS101において人体センサー50が起動される。人体センサー50は、電源ボタン201(図3参照)の操作に基づいた空気清浄機100(図3参照)の運転の開始に伴って起動する。ステップS102においては、予め定められたシーケンスに従って周囲に存在する人の検出および検知が自動的に開始される。
ステップS103においては、人体センサー50による検出の結果を含む情報に基づいて、粒子センサー60の駆動の条件が決定される。具体的な例として、図13を用いて説明する。ステップS131においては、人体センサー50から得られる情報、つまり、人の存在に係る信号が、所定のレベルに達するか否かが判定される。
人の存在に係る信号が所定のレベル以上である場合には、人が存在するものと判断することによって、ステップS132において粒子センサー60の駆動の頻度を上げる。例えば、粒子センサー60の駆動の頻度を1時間に1回以上且つ十回以下まで上げる。一方、人の存在に係る信号が所定のレベルに達しない場合には、人が存在しないものと判断することによって、ステップS133において粒子センサー60の駆動の頻度を下げる。例えば、1時間に1回もしくは1回よりも少なくする。
一般的には、空気中を浮遊する微生物等の物質を検出するためには、1時間あたり数回の検出で足りる。しかし、空気清浄機100(図2参照)が設置される環境等の条件によっては、それ以上の頻度が要求される。したがって、予め試験をしてできるだけ少ない頻度にするのが好ましい。
粒子センサー60をこのように作動させるプログラムが、制御部80(図10参照)を含むCPUに予め組み込まれることによって、人が周囲に存在するか、または、存在する可能性が高い場合に、粒子センサー60の駆動の頻度を高めることができる。このように、制御部80を含むCPUは、人の存在を検知する場合に、人の存在を検知しない場合よりも粒子センサー60による検出の単位時間あたりの回数を増加させるように構成されている。
図12に示すステップS103に続いて、ステップS104においては、空気清浄機100の運転の条件が決定される。具体的な例として、図14を用いて説明する。ステップS141においては、粒子センサー60から得られる情報、つまり、粒子センサー60によって検出(または測定)される蛍光の量(または光度)が、所定値以上であるか否かが判定される。検出(または測定)される蛍光の量(または光度)が予め定められた所定値以上である場合、つまり、空気の汚染のレベルが比較的高いことが判断される場合には、ステップS142において、空気の清浄に対する作動が強くなるように、空気清浄機100の運転のモードが調整される。図12に示すように、ステップS105においては、決定された条件下において空気清浄機100が運転する。具体的には、イオン発生器10(図10参照)の印加電圧を高めること、もしくは、印加するパルス数の増加によってイオンの発生量を増加させる方法、または、シロッコファン2(図10参照)による送風の量を増加させる方法が採用される。
このように、制御部80は、検知される浮遊物質としての粒子の量が所定の量を超える場合には、イオン発生器10またはシロッコファン2等の浄化手段の作動の量を増大させるように当該浄化手段を制御する。このような方法を実行するためのプログラムが制御部80(図10参照)等に組み込まれることによって、設置される周囲の状況に応じて空気清浄機100の運転のモードを適切に変化させることができる。このようにして、設置される周囲の状況に応じて空気清浄機100による清浄化の性能を大きくすることができるので、周囲の空気を迅速に清浄化することができる。
図14に示すように、一方、検出(または測定)される蛍光の量(または光度)が予め定められた所定値よりも小さい場合、つまり、空気の汚染のレベルが比較的低いことが判定される場合には、ステップS143において、空気の清浄に対する作動が比較的弱くなるように、空気清浄機100の運転のモードが調整される。
具体的には、イオン発生器10の印加電圧を低くすること、もしくは、印加するパルス数の減少によってイオンの発生量を減少させる方法、または、シロッコファン2による送風の量を減少させる方法が採用される。このような方法を実行するためのプログラムが制御部80(図10参照)等に組み込まれることによって、設置される周囲の状況に応じて空気清浄機100の運転のモードを適切に変化させることができる。空気清浄機100による清浄化の性能が小さくなるとしても、周囲の空気が清浄化された状態を維持するためには十分な作動の強さで空気清浄機100を運転させることができる。
なお、ステップS105のように空気清浄機100が所定の条件で運転するように、空気清浄機100の運転のモードが調整された後においても、人体センサー50は引き続き作動する。そのため、周囲の状況が変化する場合、例えば、周囲の空気の汚染のレベルが変化する場合でも、同様のプログラムが実行され続けることによって、常に最適な条件で周囲の空気を清浄化することができる。
なお、空気清浄機100が間欠的に作動するように運転している場合には、各周期において作動する時間を長くするように、各周期において作動が停止する時間を短くするように、または、各周期を短縮するように制御を変更すること等によって、空気清浄機100による清浄化の性能を向上させることができる。
なお、粒子センサー60の作動の状態は、図15に例示するパネル210によって表示される。パネル210においては、粒子センサー60(図10参照)の作動と検知に基づいた情報とが表示される。検知に基づいた情報としては、粒子センサー60が微生物等の空気中の粒子を検出したかどうかを表す情報、または、粒子センサー60によって検出される浮遊物質の量が所定の量を超えているかどうかを表す情報である。このような表示により、粒子センサー60の作動の状況と、作動による結果とを使用者が把握することができる。
以上のように、空気清浄機100は、空気を清浄化するための浄化手段の一例としてのイオン発生器10と、人体センサー50と、粒子センサー60とを備える。人体センサー50は、人の存在を検知する。粒子センサー60は、空気中の浮遊物質を検出する。また、粒子センサー60は、空気中の浮遊物質を検出する際に、これら浮遊物質を帯電させる。空気清浄機100は、人の存在が検出される場合に、人の存在が検出されない場合よりも粒子センサー60の単位時間あたりの検出回数を増加させるように構成されている。
このように、空気清浄機100においては、周囲の環境等に応じた適切な時期として、人の存在が検出される場合に、粒子センサー60による検出の単位時間あたりの回数を増加させる。これにより、空気清浄機100は、周囲の環境等に応じて、つまり、人の存否に応じて適切に運転することができる。すなわち、空気清浄機100は、現状において要求される運転のために必要な情報を、人の存否に応じて粒子センサー60から適切な時期に得ることができるため、周囲の環境等に応じて適切に運転することができる。したがって、空気清浄機100は、対象の環境に応じて、当該環境における空気を適切に調和する機能を十分に発揮することができる。
このようにすることにより、空気中の浮遊物質を静電気帯電させて検出する粒子センサー60を備えた空気調和機としての空気清浄機100であって、設置される環境に応じて粒子センサー60の検出頻度を調整することが可能な空気清浄機100を提供することができる。
また、粒子センサー60の作動の時間のうちの不要な部分を低減することができるため、粒子センサー60の長寿命化を図ることができる。
さらに、空気清浄機100においては、単に、人の存在について判定するだけで粒子センサー60の駆動の時期を変更させることができるため、複雑な演算の処理が含まれないように空気清浄機100を構成することができる。すなわち、空気清浄機100の構成を簡略化することができる。
空気清浄機100は、検出される浮遊物質の量が所定の量を超える場合には、例えば、イオン発生器10の作動の量を増大させるようにイオン発生器10を制御する。
この構成によれば、設置される環境に応じて空気清浄機100による清浄化の性能を大きくすることができるので、周囲の空気を迅速に清浄化することができる。
空気清浄機100において、粒子センサー60は、浮遊物質としての混在粒子600を捕集する捕集行程と、第1測定行程と加熱行程と第2測定行程と清掃および演算行程とを含む生物由来の粒子601の量を検出する行程とを、繰り返して実行するように構成されている。
このような粒子センサー60の作動によって、空気清浄機100は、現状において要求される運転のために必要な情報としての粒子601の量に関する情報を、人の存否に応じて粒子センサー60から適切な時期に得ることができる。
空気清浄機100は、粒子センサー60の作動に関する情報と、粒子センサー60によって検出される浮遊物質の量に関する情報とを表示するパネル210を備えている。
パネル210にこれらの情報が表示されることにより、粒子センサー60の作動の状態と、作動による結果とを使用者が把握することができる。
なお、空気清浄機100において、空気を清浄化するための浄化手段としては、イオン発生器10、または、高機能フィルタ23と送風機としてのシロッコファン2とを含む。送風機としては、シロッコファン2に限定されず、別の種類のファンが用いられていてもよい。また、空気の清浄化としては、対象の空間における加湿または除湿等も、本発明に従った空気調和機における空気の調和および清浄化に該当する。したがって、本発明に従った空気調和機における空気の浄化手段には、加湿もしくは除湿のための湿度を調整する手段等が含まれる。
以上においては、本発明に従った空気調和機が、イオン発生器10を備える空気清浄機100であるとして説明した。ただし、本発明に従った空気調和機は、空気清浄機であることに限定されない。例えば、イオンを発生させる装置を備えていなくても、空気を浄化する手段としてのフィルタおよび送風機を備えた空気調和機であれば、送風の量を変更するだけで空気清浄化の効果を向上させることができる。なお、対象の環境の温度を調節する機能を備えた空気調和機は、粒子センサー60の作動に関する情報と、粒子センサー60によって検出される浮遊物質の量に関する情報とに加えて、例えば、当該空気調和機の運転の状態も表示するパネル211(図16参照)を備えている。
このように、運転に関する情報をさらに表示するパネル211を当該空気調和機が備えることによって、使用者が当該空気調和機の運転の状態を容易に把握することができる。
粒子センサー60は、空気中に浮遊する物質として、生物由来の粒子601と化学繊維等の粒子602とを含む混在粒子600、または、生物由来の粒子601を検出している。ただし、本発明に従った空気調和機における塵埃センサーが検出する物質は、粒子に限らずに塵埃等に含まれる他の物質であってもよい。
空気清浄機100においては、制御部80を含むCPUの構成が、人体センサー50による検出に基づいて人の存在を検知し、且つ、粒子センサー60による検出に基づいて空気中の浮遊物質を検知している。しかしながら、人体センサー50自体が、検出または測定の後に検知および判定していてもよい。同様に、粒子センサー60自体が、検出または測定の後に、検知および判定していてもよい。
なお、イオン発生器10が発生させる帯電粒子としてのイオンの例は、正イオンと負イオンとに限定されない。例えば、正イオンと負イオンとのイオン種を特定せずにイオンが発生する場合には、イオンが有する電荷によって、付着対象である物体の電位を除去すること、または、空間のイオンバランスを調整することができる。
一方、発生するイオンの例が負イオンのみである場合には、対象物の正電荷に負イオンを帯電させることによって対象物の電位を除去することができるため、同時に殺菌効果を得ることができる。また一方、帯電粒子の例が帯電微粒子水である場合には、帯電微粒子水が持つ電荷による除電効果と、帯電微粒子水に含まれるイオンによる殺菌の効果とを得ることができる。
(第2実施形態)
図17に、本発明の第2実施形態の空気調和機100aを示す。空気調和機100aは、本発明に従った空気調和機の一例である。図17は、車室内の斜視図であって、車両に搭載された空気調和機100aを示す図である。
空気調和機100aは、車室の温度を調節する機能と、車室の空気を清浄化する機能とを有する。特に空気の清浄化の機能については、第1実施形態の空気清浄機100と同様に、イオン発生器10(いずれも図10参照)を搭載している。イオン発生器10が発生させるイオンは、空気調和機100aの空気吹出用のダクトを経由して車室内に拡散させられる。
図17に示すように、空気調和機100aは、人体センサー50aと粒子センサー60aとを備える。人体センサー50aと粒子センサー60aとは、例えば、車のダッシュボードに組み込まれる。人体センサー50aは、運転者以外にも搭乗者が居るか居ないかを検出している。つまり、人体センサー50aは、運転者と運転者を除く搭乗者の存在とを区別して検出することができる。粒子センサー60aは、車室内を浮遊する空気中の埃と微生物とを含む浮遊物質を検出する。
空気調和機100aは、助手席または後部座席に搭乗者が居る場合には、運転者単独の搭乗時よりも粒子センサー60aによる検出の単位時間あたりの回数を増加するように粒子センサー60aを作動させる。例えば、運転者のみの場合には、粒子センサー60aは1時間に2回検出するように作動する。運転者以外に搭乗者が居る場合には、粒子センサー60aは、例えば1時間に4回検出するように作動する。
図示しないが、空気調和機100aは、検出または測定の結果に基づいた信号を人体センサー50aと粒子センサー60aとから入力することにより、第1実施形態の空気清浄機100(図10参照)と同様に、制御に必要な判定を実行したうえで人体センサー50aによる検出の結果と粒子センサー60aによる検出の結果とを検知することができるように構成されている。また、空気調和機100aは、粒子センサー60aによる浮遊物質の検出の結果に基づいて、イオン発生器10におけるイオンの発生量または吹き出される空気の量が調節されるように、図示しないと送風機とイオン発生器10とを含む空気の浄化手段を制御する。これらの制御については、第1実施形態の空気清浄機100と同様に、制御部を含むCPUが実行する。あるいは、これらの制御について、人体センサー50a自体が実行していてもよく、且つ、粒子センサー60a自体が実行していてもよい。
なお、人体センサー50aと粒子センサー60aとは、それぞれ、人の検出と浮遊物質の検出とが可能である位置に配置されていればよく、車両において何処に設置されていてもよい。
なお、空気調和機100aにおいては、人体センサーとして、着座センサーを用いても目的を達成することができる。着座センサーとは、助手席または後部座席を含むシートに人が着座していることを検知するセンサーであって、人の重量を検知する。また、車両の重量の増加分を検知することによっても、助手席または後部座席に人が着座しているかどうかを検知することができる。近年は車両の走行性能を高めるために、その様な検知装置を備える車両も提供されているので、当該検知装置からデータを簡単に流用することができる。
以上のように、空気調和機100aは、車両に搭載され、且つ、車室内における所定の条件としての少なくとも温度を調節するための空気調和機である。人体センサー50aは、運転者を除く搭乗者の存在を検出する。空気調和機100aは、運転者を除く搭乗者の存在が検知される場合には、運転者を除く搭乗者の存在が検知されない場合よりも粒子センサー60aによる検出の単位時間あたりの回数を増加させるように構成されている。
このように、空気調和機100aにおいては、周囲の環境等に応じた適切な時期として、運転者を除く搭乗者の存在が検出される場合に、粒子センサー60aによる検出の単位時間あたりの回数を増加させる。これにより、空気調和機100aは、周囲の環境等に応じて、つまり、運転者を除く搭乗者の存否に応じて適切に運転することができる。すなわち、空気調和機100aは、現状において要求される運転のために必要な情報を、運転者を除く搭乗者の存否に応じて粒子センサー60aから適切な時期に得ることができるため、周囲の環境等に応じて適切に運転することができる。したがって、空気調和機100aは、対象の環境に応じて、当該環境における空気を適切に調和する機能を十分に発揮することができる。
以上に開示された実施の形態はすべての点で例示であって制限的なものではないと考慮されるべきである。本発明の範囲は、以上の実施の形態ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての修正と変形を含むものである。