JP2014236576A - インナーロータ型モータ - Google Patents
インナーロータ型モータ Download PDFInfo
- Publication number
- JP2014236576A JP2014236576A JP2013116272A JP2013116272A JP2014236576A JP 2014236576 A JP2014236576 A JP 2014236576A JP 2013116272 A JP2013116272 A JP 2013116272A JP 2013116272 A JP2013116272 A JP 2013116272A JP 2014236576 A JP2014236576 A JP 2014236576A
- Authority
- JP
- Japan
- Prior art keywords
- stator core
- stator
- main poles
- back yoke
- inner rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
【課題】 本発明は、角型の固定子コアを採用した固定子を有し、大型化を招くことなくトルクアップを実現し得るインナーロータ型モータを提供することを目的とする。【解決手段】 環状バックヨーク部の内側に複数の主極を突出させた固定子コア、及びこの各主極に絶縁体を介して巻回されたコイルを有する固定子と、この固定子の内側に各主極の先端に対向するように回転自在に配置され軸中心に回転軸を備えた回転子と、を有するインナーロータ型モータであって、固定子コアのバックヨーク部を外形がほぼ正方形状とし、固定子コアにおける主極を周方向等間隔で、バックヨーク部における正方形の4辺のそれぞれの中央に、任意の隣り合う2つの主極の中間が位置するように配置し、バックヨーク部における前記2つの主極の中間位置に径方向内側に向けて突出する凸部を形設する。【選択図】 図4
Description
本発明は、巻き線極である複数個の主極にコイルを巻回してなる固定子と、固定子の内側に配置される回転子とを備えたステッピングモータ等のインナーロータ型モータに関する。
従来より、ステッピングモータは、プリンタ・ファクシミリ・複写機などの情報機器分野や、FA機器などの産業機器分野を含め、広範囲に渡ってその駆動部分に使用されている。この種ステッピングモータとしては、例えば回転子に磁性体と永久磁石とを用いたハイブリッド型の場合、例えば特開2012−044826号公報に示されるインナーロータ型のものが多用されている。
図8は、この種インナーロータ型モータの一例であるハイブリッド型ステッピングモータの一部を示したものである。このモータでは、環状の磁性体枠であるバックヨーク部1に放射状でかつ内方に突出するよう複数(8個)の主極2を設けて固定子コア3を形成し、この固定子コア3の各主極2にそれぞれ図外の絶縁部材を介在させてコイル(図示せず)を巻回することにより固定子4を構成し、この固定子4の内側にエアギャップを介して、対の磁性体間に軸方向に着磁した永久磁石を挟持して構成されたハイブリッド型回転子5を配置させている。固定子4の軸方向両側にはカバー部材(図示せず)が固定され、このカバー部材の中央部にそれぞれ保持した軸受により回転子5の回転軸6を支持するようにしている。
上述したインナーロータ型ステッピングモータにあっては、固定子コア3の外周面、つまりバックヨーク部1の外周面がモータ外表面の一部を構成することにより、モータ内部で発生する熱を固定子コア3を介して効果的に放散することができる上、固定子コア3の外周面をモータカバー等で覆う必要が無く、モータカバー等の材料費を削減することができる利点がある。また、固定子コア3の軸方向両側に設けられるカバー部材は、固定子コア3の軸方向端面より突出するコイルや絶縁部材全体を包括的に覆うように構成されているため、モータ内部に対する防塵性が確保されている。
ところで、上述した特許文献1には、インナーロータ型のステッピングモータにおける固定子コアの外形が丸形状のものは、図8に示したような角型に比べて磁路面積の制約からトルクが低く、角型と同等のトルクを得るためには外形の増加を招き、モータが大型になる主旨の記載がある。従って、図8に示した角型の固定子コアを用いたステッピングモータは丸型の固定子コアを用いたものに比し高トルク化が期待できることになる。
しかし、近年では、用途に応じ、益々の高トルク化が要求される傾向にあり、このような場合、角型の固定子コアを用いたとしても大型にならざるを得ない問題がある。既存モータと同等の大きさでトルクアップを図る手立てとしては、回転子のマグネットを高磁束密度のネオジムにする等の対応が行われるが、コストアップを招く結果となる。
本発明は、上記問題点を解決するためになされたものであり、その目的とするところは、角型の固定子コアを採用した固定子を有し、大型化を招くことなくトルクアップを実現し得るインナーロータ型モータを提供することにある。
上記目的を達成するために、本発明のインナーロータ型モータにあっては、環状のバックヨーク部の内側に放射方向に突出した複数の主極を有する固定子コア、及び固定子コアの各主極に絶縁体を介して巻回されたコイルを有する固定子と、この固定子の内側に各主極の先端に対向するように回転自在に配置され軸中心に回転軸を備えた回転子と、固定子の軸方向両側を覆うように設けられそれぞれ回転軸を支持する軸受を保持した2つのカバー部材とからなるインナーロータ型モータにおいて、
固定子コアのバックヨーク部を外形ほぼ正方形状とし、固定子コアにおける主極を周方向等間隔で、バックヨーク部における正方形の4辺のそれぞれの中央に、任意の隣り合う2つの主極の中間が位置するよう配置し、かつ、バックヨーク部の4辺における前記2つの主極の中間位置に径方向内側に向けて突出する凸部を形設する。
固定子コアのバックヨーク部を外形ほぼ正方形状とし、固定子コアにおける主極を周方向等間隔で、バックヨーク部における正方形の4辺のそれぞれの中央に、任意の隣り合う2つの主極の中間が位置するよう配置し、かつ、バックヨーク部の4辺における前記2つの主極の中間位置に径方向内側に向けて突出する凸部を形設する。
上記モータにおける固定子は、固定子コアにおける主極を8個としてこれに2相のコイルを巻回するようにし、各主極を45°毎の等間隔に配置すると共に、これら各主極の位置をバックヨーク部における正方形の4辺の各中央部から周方向に22.5°傾いた角度に設定することができる。この場合、固定子コアにおける各主極間のうち、バックヨーク部における正方形の4辺の各中央部に対応する部分のみに凸部を設けるようにしてもよい。加えて、バックヨーク部における凸部は、任意の隣り合う2つの主極の中間に頂点が位置するほぼ山状に形成したり、任意の隣り合う2つの主極の中間に中心が位置する等脚台形に形成することができる。さらに、固定子コアにおける最小外径に対する最大内径の比を0.65〜0.75に設定することが望ましい。
上述した構成のインナーロータ型モータにあっては、角型の固定子コアのバックヨーク部における正方形の4辺の各中間部から径方向内側に向けた凸部が形設されることにより、4辺の各中央部における肉厚を確保することができる。従って、固定子コアのバックヨーク部における正方形の4辺の各中央部に単に2つの主極の中間を位置させた場合には、バックヨーク部における正方形の4辺の各中央部の径方向寸法を小さくせざるを得ないが、凸部を設けることによりこの不具合を解消することができ、バックヨーク部における四辺形の4辺における中央部の肉厚を確保できることになる。このため、例えば、固定子コアの最小外径に対する最大内径の比を0.65〜0.75に設定する等、各主極におけるコイルの巻数・巻容積を所定確保した上で、固定子コアの内径を従来のものより大きくする場合に有利となり、これにより回転子の外径を大きくでき、高トルク化を図ることができる。言い換えれば、回転子の外径を大きくできることから、回転子に使用するマグネットを従来よりも寸法の小さい、あるいは低グレードのものを使用しても従来と同等若しくはそれ以上のトルクを確保できることになり、コスト低減に大きく寄与できることになる。
本発明に係るインナーロータ型モータの実施形態につき、以下図面に基づいて説明する。
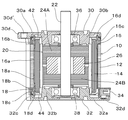
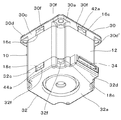
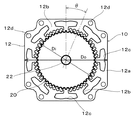
図1〜図3は、本発明の第1の実施形態である2相ハイブリッド(HB)型ステッピングモータ1の全体構成を示し、図1は平面図、図2は断面図、図3は斜視図である。また、図4は主極数が8である固定子10の固定子コア12とその内側に配置されたHB型回転子20とを示している。この実施形態は、固定子10として、不平衡電磁力が発生せず高速性に優れた8主極構造を採用した例であり、8主極の巻き線極である首部にはそれぞれコイルが巻回され、1個おきの4個の各主極に巻回されたコイルが連結されて1相分を形成し、残りの4主極で他の1相分を形成し、全体で2相コイル構成としている。
図1〜図3は、本発明の第1の実施形態である2相ハイブリッド(HB)型ステッピングモータ1の全体構成を示し、図1は平面図、図2は断面図、図3は斜視図である。また、図4は主極数が8である固定子10の固定子コア12とその内側に配置されたHB型回転子20とを示している。この実施形態は、固定子10として、不平衡電磁力が発生せず高速性に優れた8主極構造を採用した例であり、8主極の巻き線極である首部にはそれぞれコイルが巻回され、1個おきの4個の各主極に巻回されたコイルが連結されて1相分を形成し、残りの4主極で他の1相分を形成し、全体で2相コイル構成としている。
固定子10は、外形が四隅を切除したほぼ正四辺形状に形成され内周がほぼ円周面に形成された環状のバックヨーク部12aとこのバックヨーク部12aより放射状内方に突出して設けられた8個の主極12bとからなる固定子コア12と、各主極12bに巻回された2相のコイル14(図2に示す)と、各主極12bとコイル14との間に介在された上下の絶縁部材16・18とからなり、巻き線極である各主極12bの先端にはそれぞれ6個の誘導子歯が設けられている。8個の主極12bは周方向等間隔に45°毎に配列されており、図4に示すように、バックヨーク部12aの四辺形の一辺の中央からθ=22.5°周方向にずれた位置に主極12bが配置されるよう、各主極12bが図8で示した従来のものに比し周方向にθだけ傾いてそれぞれ配置されている。各主極12bにおいて、6個の誘導子歯は等間隔に配置され、かつ主極12bの中心線に対し対称に配置されている。なお、6個の誘導子歯は等ピッチに配置する以外に、高調波成分の改善を目的として不等ピッチに配置することもできる。
固定子コア12は複数枚の珪素鋼板を積層して構成されている。図4において、例えば90°毎に配置された4個の主極12bで1相分(A相・C相)を構成し、残りの4個の機械角で互いに90°隔てて且つ1相分主極からは機械角で45度隔てて配置された主極12bで2相分(B相・D相)を形成する。各相において、90°毎の4個の主極12bはコイル14への通電時に交互に異極となるように励磁され駆動される。
図4に示すように、固定子コア12は、バックヨーク部12aの四辺形の各辺における径方向厚みが磁気特性上許容される範囲の最小値に設定され、その分、内径が最大化されている。すなわち、例えば特開平5−168214号公報には、回転子から最大トルクを発生させるために、固定子の外径に対する内径の比を、2相の場合で0.62〜0.64にすることが規定され、図8に示した従来構成のものでは、固定子コア3の最小外径Doに対し内径Diの比は0.625となっているが、本実施形態のようにバックヨーク部12aがほぼ正方形の場合につき、実験や各種解析で検証した結果、特性上、正方形の一辺の長さに相当する固定子コア12の最小外径Doに対し内径Diの比を約0.66に設定可能であることが確認され、内径Diが従来に比し数%以上大きく設定されている。
ここで、固定子コア12の内径を大きくすることは、その分、回転子の外径を大きくでき、出力トルクをアップすることが期待できることになる。ところが、図8で示した従来構成の場合、単に固定子コアの内径を大きくすると、その分、主極の突出長が短くなり、コイルの巻数・線積率が小さく、逆に発生トルクの低下を招く結果となる。これに対し、図4で説明したように、各主極12bの位置を図8のものに比べ、周方向に所定角度θ(実施形態では22.5°)傾けることにより、各主極12bの突出長さを所定確保した上で、固定子コア12の内径を大きくすることが可能になり、トルクアップに大きく寄与できることになる。
ここで、上述したように、固定子コア12の各主極12bを所定角度θ傾けることにより、各主極12bの突出長さを所定確保した上で、固定子コア12の内径を大きくすることが可能になるが、各主極12bへのコイル巻数をより多く確保する際には、各スロット内面のうちバックヨーク部12aに対応する部分の内周面は円弧状とするのがよい。反面、スロット内周面が円弧面になると、特にモータサイズが小さい場合(例えば、正方形の各辺が42mm×42mmの外形寸法に相当する大きさ)では、バックヨーク部12aにおける正方形の4辺の各中央部における径方向厚み寸法が小さくなり、強度不足となってしまう。また、磁気特性上においても不具合を生じてしまう。磁気特性の不具合としては、バックヨーク部の肉厚が小さいことによって最小肉厚部に磁束が集中し、磁気飽和が発生することである。このバックヨーク部の磁気飽和により逆起電力の歪みやディテントトルクが増大する。これによりモータ特性が悪化(トルク損失やトルクリップルが増大)することになる。
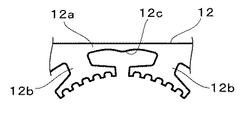
このため、本実施形態では、バックヨーク部12aにおける隣り合う2つの主極12bの中間位置に、径方向内側に向けて突出する凸部12cを形設するようにしている。この凸部12cは、図5に示すように、隣り合う2つの主極12bの中間に頂点が位置するようななだらかな山状に形成され、この山の傾斜面が各主極12bに巻回されるコイル14に巻き崩れが生じないようにも機能する。このように、バックヨーク部12aにおける隣り合う2つの主極12bの中間位置に凸部12cを設けたことにより、特に、バックヨーク部12aにおける正方形の4辺の中央部の径方向厚みを所定確保することができ、スロット内周面をほぼ円弧面にした上で、バックヨーク部12aの強度上及び磁気特性上の改善を図っている。特に、バックヨーク部12aの磁気飽和が解消されることで、ロータ外径の拡大によるトルクアップと固定子コア12の磁気特性の改善を両立することができる。
上記固定子コア12に対しては、軸方向両側(便宜上、上側及び下側と称する)から一対の絶縁部材16・18が装着される。これらは固定子コア12に対しコイル14を絶縁する絶縁体となり、絶縁性樹脂の成形体により構成される。上側から装着される上側絶縁部材16及び下側から装着される下側絶縁部材18はそれぞれ、各主極12bの上面及び両側面を覆うスロット絶縁部16a・各主極12bの下面及び両側面を覆うスロット絶縁部18aと、各スロット絶縁部16a・18aをそれぞれ上・下の外側部において環状に連結する枠部16b・18bとを備えてなる。各スロット絶縁部16a・18aはその径方向外側縁がバックヨーク部12aの内周面に沿って延設されて隣り合うスロット絶縁部16a・18aが相互に連結され、これにより各スロットの内面を覆う構成になっている。
一方、固定子コア12の内側に配置された回転子20は、図2に示すように、回転軸22に固定された軸方向に対向した一対の回転子磁極24A・24Bと、対の回転子磁極24A・24B間で挟持され軸方向に着磁された円筒状の永久磁石26とにより構成されている。これら回転子磁極24A・24Bはそれぞれ珪素鋼鈑等を積層して構成され、それぞれの外周には等ピッチで複数個(例えば50個)の磁歯が設けられて、かつ互いに歯ピッチが1/2ずれて配置され、両者の間に永久磁石26を挟持する構成になっている。回転子20の各回転子磁極24A・24Bのそれぞれの磁歯は、固定子10の各主磁極12bの誘導子歯に例えば0.05mmのエアギャップを介して径方向に対向する。永久磁石26としては例えばFCC磁石が用いられている。
ここで、上述したように、固定子10においては、その内径が従来に比し数%以上大きく設定されているが、これに合わせて、回転子20の外径も従来に比し数%程度大きく設定されている。このため、永久磁石26にアルニコ磁石とほぼ同等のFCC磁石を用いても得られるトルクは各段に大きなものとなる。勿論、永久磁石26として残留磁束密度の低いフェライト系のものを使用することもできる。
図2において、固定子10の軸方向両側には、上カバー部材30及び下カバー部材32が配置され、固定子10の外周面と共にモータ外表面を構成している。両カバー部材30・32はそれぞれ金属材料により構成され、その外側はそれぞれ固定子コア12と同様にほぼ正四辺形状に形成されている。
上カバー部材30は、モータの上端面を構成するほぼ正方形状の端板部30aと、この端板部30aの中央部に下方へ突出するように形成された円筒状の軸受保持部30bと、端板部30aの周縁部に下方へ突出するように形成され外周面が固定子コア12の外周面とほぼ面一になるよう四隅を切り欠いたほぼ正方形状とされた側壁部30cとを備えてなる。この端板部30aの四隅の角部30dはそれぞれ側壁部30cの四隅より突出し、この位置にねじ孔30d’が形成されている。
下カバー部材32は、モータの下端面を構成する四隅を切り欠いたほぼ正方形状の端板部32aと、この端板部32aの中央部に上方へ突出するように形成された円筒状の軸受保持部32bと、端板部32aの周縁に上方へ突出するように形成された周壁部32cとを備えてなる。この下カバー部材32の正方形の4辺のうち特定の一辺には、端板部32aの一辺を外方に延設すると共にこの両側に沿って周壁部32cを延設することにより大きな開口を有する口出し部32dが形成され、これに枠部18bのコネクタ保持部が収容され、コネクタ保持部に保持されたコネクタ34が内装されている。このコネクタ34の端子ピンには、2相のコイル14の各端子が接続されている。
図2に示すように、上カバー部材30及び下カバー部材32のそれぞれの軸受保持部30b・32bにはボールベアリングからなる軸受36・38が保持され、回転子20の回転軸22が両軸受36・38により回転自在に支持されている。上カバー部材30の端板部30aにおける四隅部におけるねじ孔30dの近傍にはそれぞれ、ねじ挿通孔が形成されており、これに固定子コア12の軸方向の挿通孔12dが連通しており、さらにこれに合わせて下カバー部材32にねじ孔がそれぞれ形成されている。そして、端板部30aのねじ挿通孔からそれぞれ固定ねじ40を挿通し、固定子コア12のねじ挿通孔12dを通して下カバー部材32におけるねじ孔に締着することにより、固定子10の上下両側に上下カバー部材30・32を一体に固着することができる。
ここで、図3より明らかなように、上カバー部材30における側壁部30cには、正方形の4辺の中央部及び四隅部分の中央部にそれぞれ窓状に開口30fが形成され、これに上側絶縁部材16の枠部16bにおける各外表面部16cがそれぞれ嵌合されて、各外表面部16cの外側面が上カバー部材30の側壁部30cの外側面と連続したモータ外側面の一部を構成するようになっている。また、下カバー部材32における側壁部32cには、正方形の4辺のうち口出し部32dを除く3辺の中央部及び四隅部分の中央部にそれぞれ窓状の開口32fが形成され、これに下側絶縁部材18の枠部18bにおける各外表面部18cがそれぞれ嵌合され、上述と同様に、各外表面部18cの外側面が下カバー部材32の側壁部32cの外側面と連続したモータ外側面の一部を構成している。
固定子12の上下には、各主極12bに巻回されたコイル14の上下面を覆うように絶縁カバー42・44が配置され、上下カバー部材30・32の端板部30a・32aに対するコイル14の絶縁を確保している。この絶縁カバー42・44は絶縁性樹脂により形成され、それぞれ各主極12bの上下を覆うよう、つまり絶縁部材16・18における枠部16b・18bと各主極12bの先端部に対応したスロット絶縁部16a・18aの舌片との間を覆うように環状に形成されている。これら絶縁カバー42・44には、それぞれの外周縁に、枠部16b・18bの各外表面部16c・18cにそれぞれ合致する補助突部42a・44aが形成されており、これが外表面部16c・18cと共にカバー部材30・32における側壁部30c・32cの開口30f・32fに嵌め込まれている。この結果、絶縁カバー42・44が回り止めされた上でカバー部材30・32に押さえつけられて確実に固定され、加えて、各開口30f・32fがそれぞれ気密に閉塞されることになり、カバー部材30・32内部に対する防塵効果が得られる。
以上のような構成のステッピングモータにあっては、固定子コア12の各主極12bを従来のものに比し周方向に22.5°傾いた角度に設定すると共に、各主極12bにおけるコイル14の巻数を所定数確保した上で各主極12bの内径を大きくすることが可能となり、回転子20を大径化し、出力を大幅にアップすることができる。特に、固定子コア12の各主極12bを周方向に22.5°傾けた場合に、バックヨーク部12aにおける4辺の中央部における径方向厚みが小さくなり強度上や磁気特性上の不具合が生じる点を、隣り合う2つの主極12bの中間位置に径方向内側へ突出する凸部12cを設けることにより解消し、固定子コア12の内径を最大限大きくしつつバックヨーク部12aの径方向厚みを強度上及び磁気特性上必要とされる最小値に設定することが可能となる。この結果、回転子20の大径化による出力アップが可能なことから、回転子20の永久磁石26として低グレードのフェライト系永久磁石を用いたとしても、従来のものに比し高出力化を図ることが可能となり、安価なモータを提供できることになる。或いは、回転子20に用いる永久磁石26を従来のものより小径としても、従来と同等以上の出力を得ることが可能であり、材料費等、コスト低減に寄与できるものである。
加えて、固定子10を8主極構成で2相コイルを用いた場合に、各主極12bを正方形の4辺の中央から22.5°傾いた角度に設定することにより、上述した効果は勿論のこと、固定子コア12を90°回転対称形状とすることができ、固定子コア12を珪素鋼板を所定枚数積層して構成する場合に、珪素鋼板を所定形状にプレス打ち抜きしたものを90°ずつ次々に回転して積層する手法を採用でき、パーミアンスベクトルのバラツキ抑制効果を得ることができる。
図6は、本発明の他の実施形態によるインナーロータ型ステッピングモータの固定子コア12Xを示したものである。同図において、第1の実施形態を示した図1〜図5と同一符号のものは同一もしくは相当するものを示すものとする。図6において、第1の実施形態と異なる点は、固定子コア12Xのバックヨーク部12aにおいて、隣り合う各主極12b間のそれぞれの中間部のうち、正方形の4辺に対応する位置にのみ径方向内側に突出する凸部12cを設けるようにした点であり、正方形の四隅に対応する部分には凸部は設けず、スロット内面は円弧面としている。
図6に示す実施形態によれば、図1〜図5に示した実施形態のものと同様の作用効果を奏する上、バックヨーク部12aにおける正方形の四隅における径方向厚みが必要以上に大きくなることが無く、各主極12b間のバックヨーク幅の不均一を改善することができるものである。
次に、図7は、本発明の更に他の実施形態を示すインナーロータ型ステッピングモータの固定子コア12Yの一部を拡大して示したものである。この実施形態に示すものは、固定子コア12Yのバックヨーク部12aにおいて、隣り合う2つの主極12bの中間位置に径方向内側に向けて突出するよう形設した凸部12c’を、隣り合う2つの主極12bの中間に中心が位置する等脚台形にしたものである。従って、この実施形態においても、図1〜図5に示したものと同様の効果が得られる。
以上、本発明の好ましい実施形態について説明したが、本発明は、上記実施形態に限定されることなく、特許請求の範囲に記載した範囲において種々の変形が可能である。
例えば、上記した実施形態では、2相ステッピングモータの場合について説明したが、これに限らず、他のインナーロータ型モータに適用でき、また、モータの回転子として、ハイブリッド型に限らず、異なる磁極を周方向に交互に配置した永久磁石型回転子を用いてもよい。
例えば、上記した実施形態では、2相ステッピングモータの場合について説明したが、これに限らず、他のインナーロータ型モータに適用でき、また、モータの回転子として、ハイブリッド型に限らず、異なる磁極を周方向に交互に配置した永久磁石型回転子を用いてもよい。
本発明によるインナーロータ型モータは、高トルク化が可能で、低コスト化を図ることができ、ステッピングモータとして、OA機器である複写機やプリンターの用途に対し安価で高速高トルク低振動の回転電機の提供が可能であり、工業的に大きな寄与が期待される。その他、医療機器、FA機器、ロボット、遊戯機械、住宅設備機器への応用も大いに期待される。
10:固定子
12・12X・12Y:固定子コア
12a:バックヨーク部
12b:主極
12c・12c’:凸部
14:コイル
16・18:絶縁部材
20:回転子
22:回転軸
12・12X・12Y:固定子コア
12a:バックヨーク部
12b:主極
12c・12c’:凸部
14:コイル
16・18:絶縁部材
20:回転子
22:回転軸
Claims (6)
- 環状のバックヨーク部の内側に放射方向に突出した複数の主極を有する固定子コア、及び該固定子コアの各主極に絶縁体を介して巻回されたコイルを有する固定子と、この固定子の内側に前記各主極の先端に対向するように回転自在に配置され軸中心に回転軸を備えた回転子と、前記固定子の軸方向両側を覆うように設けられそれぞれ前記回転軸を支持する軸受を保持した2つのカバー部材とからなるインナーロータ型モータにおいて、
前記固定子コアのバックヨーク部は外形がほぼ正方形状であり、前記固定子コアにおける主極は周方向等間隔で、前記バックヨーク部における正方形の4辺のそれぞれの中央に、任意の隣り合う2つの主極の中間が位置するように配置され、かつ、前記バックヨーク部の4辺における前記2つの主極の中間位置には径方向内側に向けて突出する凸部が形設されていることを特徴とするインナーロータ型モータ。 - 前記固定子は、前記固定子コアにおける主極を8個としこれに2相のコイルを巻回して構成され、前記各主極は45°毎の等間隔に配置されると共に、これら各主極の位置は前記固定子コアにおける正方形の4辺のそれぞれの中央から周方向に22.5°傾いた角度に設定されていることを特徴とする請求項1に記載のインナーロータ型モータ。
- 前記固定子コアの8個の主極のそれぞれの間のうち、前記固定子コアにおける正方形の4辺のそれぞれの中央にのみ前記凸部が設けられていることを特徴とする請求項2に記載のインナーロータ型モータ。
- 前記凸部は、前記任意の隣り合う2つの主極の中間に頂点が位置するほぼ山状になっている請求項1〜3のいずれかに記載のインナーロータ型モータ。
- 前記凸部は、前記任意の隣り合う2つの主極の中間に中心が位置する等脚台形になっている請求項1〜3のいずれかに記載のインナーロータ型モータ。
- 前記固定子コアにおける最小外径に対する最大内径の比が0.65〜0.75に設定されていることを特徴とする請求項1〜5のいずれかに記載のインナーロータ型モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013116272A JP2014236576A (ja) | 2013-05-31 | 2013-05-31 | インナーロータ型モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013116272A JP2014236576A (ja) | 2013-05-31 | 2013-05-31 | インナーロータ型モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014236576A true JP2014236576A (ja) | 2014-12-15 |
Family
ID=52138920
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013116272A Pending JP2014236576A (ja) | 2013-05-31 | 2013-05-31 | インナーロータ型モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014236576A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017070097A (ja) * | 2015-09-30 | 2017-04-06 | アイシン精機株式会社 | 回転電機 |
| CN108809041A (zh) * | 2017-05-04 | 2018-11-13 | 上海鸣志电器股份有限公司 | 一种步进电机 |
| CN109038877A (zh) * | 2017-06-09 | 2018-12-18 | 发那科株式会社 | 马达 |
| CN109713808A (zh) * | 2017-10-26 | 2019-05-03 | 上海鸣志电器股份有限公司 | 一种三相步进电机 |
| CN110036552A (zh) * | 2017-04-05 | 2019-07-19 | 三菱电机株式会社 | 定子芯构成片及旋转电机 |
| WO2019189527A1 (ja) * | 2018-03-30 | 2019-10-03 | 日本電産株式会社 | ステータおよびモータ |
| CN113631293A (zh) * | 2019-03-28 | 2021-11-09 | 日本电产株式会社 | 定子芯体板制造方法、定子芯体板、定子芯体以及模具 |
-
2013
- 2013-05-31 JP JP2013116272A patent/JP2014236576A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017070097A (ja) * | 2015-09-30 | 2017-04-06 | アイシン精機株式会社 | 回転電機 |
| CN110036552A (zh) * | 2017-04-05 | 2019-07-19 | 三菱电机株式会社 | 定子芯构成片及旋转电机 |
| CN110036552B (zh) * | 2017-04-05 | 2020-09-22 | 三菱电机株式会社 | 定子芯构成片及旋转电机 |
| CN108809041A (zh) * | 2017-05-04 | 2018-11-13 | 上海鸣志电器股份有限公司 | 一种步进电机 |
| CN109038877A (zh) * | 2017-06-09 | 2018-12-18 | 发那科株式会社 | 马达 |
| JP2018207755A (ja) * | 2017-06-09 | 2018-12-27 | ファナック株式会社 | モータ |
| CN109713808A (zh) * | 2017-10-26 | 2019-05-03 | 上海鸣志电器股份有限公司 | 一种三相步进电机 |
| CN109713808B (zh) * | 2017-10-26 | 2024-02-23 | 上海鸣志电器股份有限公司 | 一种三相步进电机 |
| WO2019189527A1 (ja) * | 2018-03-30 | 2019-10-03 | 日本電産株式会社 | ステータおよびモータ |
| CN113631293A (zh) * | 2019-03-28 | 2021-11-09 | 日本电产株式会社 | 定子芯体板制造方法、定子芯体板、定子芯体以及模具 |
| CN113631293B (zh) * | 2019-03-28 | 2024-03-22 | 日本电产株式会社 | 定子芯体板制造方法、定子芯体板、定子芯体以及模具 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014236576A (ja) | インナーロータ型モータ | |
| US12542459B2 (en) | Electric motor | |
| WO2014188628A1 (ja) | ロータおよびモータ | |
| CN104716803A (zh) | 永磁体同步电机 | |
| JP2007049884A (ja) | 小型dcモータ | |
| WO2013094659A1 (ja) | インナーロータ型モータ | |
| US7779532B2 (en) | Manufacturing method of hybrid permanent magnet type electric rotating machine | |
| JPWO2022019074A5 (ja) | ||
| WO2014069288A1 (ja) | インナーロータ型モータ | |
| JP5745347B2 (ja) | ロータ及びモータ | |
| JP2018098936A (ja) | 磁石ユニット | |
| JP7258824B2 (ja) | 回転電機 | |
| KR20190074467A (ko) | 분할 고정자를 갖는 모터 | |
| JP2013106417A (ja) | ロータ及びモータ | |
| KR101597967B1 (ko) | 평판형 모터의 고정자 및 이를 이용한 평판형 모터 | |
| KR102872324B1 (ko) | 자속 집중형 회전자 및 회전자의 착자 장치 | |
| JP7632471B2 (ja) | 回転電機 | |
| KR20150080843A (ko) | 축 방향 스포크 타입 전동기 | |
| JP6121784B2 (ja) | ブラシレス直流モータ、鏡筒及び撮像装置 | |
| JP2014082882A (ja) | 磁石埋込型ロータ及び磁石埋込型ロータの製造方法 | |
| JP5401753B2 (ja) | 回転電機 | |
| WO2025204819A1 (ja) | ロータおよびモータ | |
| CN119906173A (zh) | 转子及具备该转子的马达 | |
| JP6662008B2 (ja) | ステータ、モータ及びステータの製造方法 | |
| WO2024089882A1 (ja) | モータ |