JP2014238357A - 受信装置、時刻差算出方法、およびプログラム - Google Patents
受信装置、時刻差算出方法、およびプログラム Download PDFInfo
- Publication number
- JP2014238357A JP2014238357A JP2013121589A JP2013121589A JP2014238357A JP 2014238357 A JP2014238357 A JP 2014238357A JP 2013121589 A JP2013121589 A JP 2013121589A JP 2013121589 A JP2013121589 A JP 2013121589A JP 2014238357 A JP2014238357 A JP 2014238357A
- Authority
- JP
- Japan
- Prior art keywords
- time
- delay
- delay time
- difference
- time difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W56/00—Synchronisation arrangements
- H04W56/004—Synchronisation arrangements compensating for timing error of reception due to propagation delay
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
- H04J3/0658—Clock or time synchronisation among packet nodes
- H04J3/0661—Clock or time synchronisation among packet nodes using timestamps
- H04J3/0667—Bidirectional timestamps, e.g. NTP or PTP for compensation of clock drift and for compensation of propagation delays
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
- Electric Clocks (AREA)
Abstract
【課題】送信装置における時刻と受信装置における時刻との間の時刻差を算出することが可能な、受信装置、時刻差算出方法、およびプログラムを提供する。【解決手段】送信装置が送信信号を送信した時刻を示す第1時刻情報と、送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、送信信号が受信されるまでの時間差を示す第1遅延時間を算出する第1遅延時間算出部と、受信装置が応答信号を送信した時刻を示す第3時刻情報と、応答信号が送信装置において受信された時刻を示す第4時刻情報とに基づいて、応答信号が受信されるまでの時間差を示す第2遅延時間を算出する第2遅延時間算出部と、第1遅延時間と第2遅延時間とに基づいて時刻差を算出する時刻差算出部とを備え、時刻差算出部は、フィルタを用いずに、第1遅延時間と第2遅延時間とにおける固定遅延成分を、論理演算により時間差として算出する、受信装置が提供される。【選択図】図4
Description
本開示は、受信装置、時刻差算出方法、およびプログラムに関する。
送信装置と受信装置との間の通信によって、受信装置における時計の時刻を修正させる方法としては、例えば、IEEE1588 PTP(Precision Time Protocol)規格に係る方法が挙げられる。また、同期パケットを用いて、受信装置における時計の時刻を修正する技術としては、例えば、下記の特許文献1に記載の技術が挙げられる。
IEEE1588 PTP規格に係る方法が用いられる場合には、例えば、送信装置から送信された送信信号が受信装置において受信されるまでの時間差(以下、「往路の遅延時間」と示す場合がある。)と、受信装置から送信された応答信号が送信装置において受信されるまでの時間差(以下、「復路の遅延時間」と示す場合がある。)とが等しいこと、または、往路の遅延時間と復路の遅延時間との平均値が等しいことが前提となる。しかしながら、送信装置と受信装置との間で通信が行われる実際のネットワークでは、往路の遅延時間と復路の遅延時間とが等しくなる、または、往路の遅延時間と復路の遅延時間との平均値が等しくなる蓋然性は小さい。よって、IEEE1588 PTP規格に係る方法を用いたとしても、受信装置における時計の時刻をより正確に修正できるとは限らない。
また、例えば特許文献1に記載の技術は、受信装置が、時間的に隣り合う同期制御パケットの受信時刻差と送信時刻差の差分を累積演算することにより、往路の遅延時間を推定する。よって、例えば特許文献1に記載の技術を用いる場合には、往路の遅延時間のみを用いて、送信装置と受信装置との間の通信における遅延時間を推定することが可能である。しかしながら、例えば特許文献1に記載の技術を用いる場合には、遅延時間の最小値を、遅延時間を推定するための条件として予め受信装置に与える必要がある。よって、例えば特許文献1に記載の技術を用いたとしても、与えられる遅延時間の最小値によっては、受信装置における時計の時刻をより正確に修正できるとは限らない。
本開示では、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することが可能な、新規かつ改良された受信装置、時刻差算出方法、およびプログラムを提案する。
本開示によれば、送信装置が送信信号を送信した時刻を示す第1時刻情報と、上記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、上記送信信号が上記受信装置において受信されるまでの時間差を示す第1遅延時間を算出する第1遅延時間算出部と、上記受信装置が上記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、上記応答信号が上記送信装置において受信された時刻を示す第4時刻情報とに基づいて、上記応答信号が上記送信装置において受信されるまでの時間差を示す第2遅延時間を算出する第2遅延時間算出部と、算出された上記第1遅延時間と上記第2遅延時間とに基づいて、上記送信装置における時計の時刻と上記受信装置における時計の時刻との間の時刻差を算出する時刻差算出部と、を備え、上記時刻差算出部は、フィルタを用いずに、上記第1遅延時間と上記第2遅延時間とにおける固定遅延成分を、論理演算により上記時間差として算出する、受信装置が提供される。
また、本開示によれば、送信装置が送信信号を送信した時刻を示す第1時刻情報と、上記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、上記送信信号が上記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップと、上記受信装置が上記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、上記応答信号が上記送信装置において受信された時刻を示す第4時刻情報とに基づいて、上記応答信号が上記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップと、算出された上記第1遅延時間と上記第2遅延時間とに基づいて、上記送信装置における時計の時刻と上記受信装置における時計の時刻との間の時刻差を算出するステップと、を有し、上記時刻差を算出するステップでは、フィルタが用いられずに、上記第1遅延時間と上記第2遅延時間とにおける固定遅延成分が、論理演算により上記時間差として算出される、時刻差算出方法が提供される。
また、本開示によれば、送信装置が送信信号を送信した時刻を示す第1時刻情報と、上記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、上記送信信号が上記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップ、上記受信装置が上記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、上記応答信号が上記送信装置において受信された時刻を示す第4時刻情報とに基づいて、上記応答信号が上記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップ、算出された上記第1遅延時間と上記第2遅延時間とに基づいて、上記送信装置における時計の時刻と上記受信装置における時計の時刻との間の時刻差を算出するステップ、をコンピュータに実行させ、上記時刻差を算出するステップでは、フィルタが用いられずに、上記第1遅延時間と上記第2遅延時間とにおける固定遅延成分が、論理演算により上記時間差として算出される、プログラムが提供される。
本開示によれば、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することができる。
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
また、以下では、下記に示す順序で説明を行う。
1.本実施形態に係る時刻差算出方法
2.本実施形態に係る受信装置
3.本実施形態に係るプログラム
1.本実施形態に係る時刻差算出方法
2.本実施形態に係る受信装置
3.本実施形態に係るプログラム
(本実施形態に係る時刻差算出方法)
本実施形態に係る受信装置の構成について説明する前に、まず、本実施形態に係る時刻差算出方法について説明する。以下では、本実施形態に係る受信装置が、本実施形態に係る時刻差算出方法に係る処理を行う場合を例に挙げて、本実施形態に係る時刻差算出方法について説明する。
本実施形態に係る受信装置の構成について説明する前に、まず、本実施形態に係る時刻差算出方法について説明する。以下では、本実施形態に係る受信装置が、本実施形態に係る時刻差算出方法に係る処理を行う場合を例に挙げて、本実施形態に係る時刻差算出方法について説明する。
[I]既存の技術を用いる場合における問題の一例
上述したように、IEEE1588 PTP規格に係る方法や、上記特許文献1に記載の技術などの既存の技術を用いたとしても、受信装置における時計の時刻をより正確に修正できるとは限らない。本実施形態に係る時刻差算出方法について説明する前に、非同期ネットワークを介して受信装置における時計の時刻を修正する方法の一つである、IEEE1588 PTP規格に係る方法と、当該方法における問題の一例について、より具体的に説明する。
上述したように、IEEE1588 PTP規格に係る方法や、上記特許文献1に記載の技術などの既存の技術を用いたとしても、受信装置における時計の時刻をより正確に修正できるとは限らない。本実施形態に係る時刻差算出方法について説明する前に、非同期ネットワークを介して受信装置における時計の時刻を修正する方法の一つである、IEEE1588 PTP規格に係る方法と、当該方法における問題の一例について、より具体的に説明する。
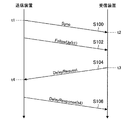
IEEE1588 PTP規格では、同期化メッセージ(以下、「Sync」と示す場合がある。)、フォローアップメッセージ(以下、「Follow−up」と示す場合がある。)、遅延要求メッセージ(以下、「Delay−request」と示す場合がある。)、および遅延応答メッセージ(以下、「Delay−response」と示す場合がある。)の4種類のメッセージを、送信装置と受信装置との間で送受信することによって、送信装置における時計の時刻と受信装置における時計の時刻との間で同期が図られる。
図1は、IEEE1588 PTP規格に係る方法を説明するための説明図である。
送信装置は、時刻同期動作の開始を伝えるために、Syncを受信装置に対して送信する(S100)。
ステップS100において送信装置から送信されたSyncを受信した受信装置は、受信装置における時計で計測されたSyncの受信時刻t2を特定し、Syncの受信時刻t2を示す時刻情報(後述する本実施形態に係る第2時刻情報に相当する。)を処理に用いる。
また、送信装置は、時刻同期動作の開始時刻情報を伝えるために、Sync送信後にFollow−upを受信装置に対して送信する(S102)。ここで、ステップS102において送信されるFollow−upには、例えば、送信装置における時計で計測されたSyncの送信時刻t1を示す時刻情報(後述する本実施形態に係る第1時刻情報に相当する。)が含まれる。
ステップS102において送信装置から送信されたFollow−upを受信した受信装置は、送信装置にDelay−responseの送信を要求するために、Delay−requestを送信装置に対して送信する。ここで、Delay−requestは、後述する本実施形態に係る応答信号に相当する。また、受信装置は、受信装置における時計で計測されたDelay−requestの送信時刻t3を特定し、Delay−requestの送信時刻t3を示す時刻情報(後述する本実施形態に係る第3時刻情報に相当する。)を処理に用いる。
ステップS104において受信装置から送信されたDelay−requestを受信した送信装置は、受信されたDelay−requestに応じてDelay−responseを受信装置に対して送信する(S106)。ここで、送信装置は、送信装置における時計で計測されたDelay−requestの受信時刻t4を特定する。そして、送信装置は、Delay−requestの受信時刻t4を示す時刻情報(後述する本実施形態に係る第4時刻情報に相当する。)を含むDelay−responseを、受信装置に対して送信する。
例えば図1に示すような信号の送受信が、送信装置と受信装置との間で行われることによって、受信装置は、Syncの送信時刻t1、Syncの受信時刻t2、Delay−requestの送信時刻t3、およびDelay−requestの受信時刻t4を、処理に用いる。
より具体的には、送信装置の時計と受信装置の時計のクロック周波数を一致させる手段(後述する)によって、当該クロック周波数が一致した状態において、往路の遅延時間と、復路の遅延時間とが等しいと仮定すると、下記の数式1、数式2が成立する。ここで、数式1、数式2に示す“オフセット”とは、送信装置における時計と受信装置における時計の時刻差を表している。
t2−t1=遅延時間+オフセット
・・・(数式1)
・・・(数式1)
t4−t3=遅延時間−オフセット
・・・(数式2)
・・・(数式2)
IEEE1588 PTP規格に係る方法を用いる受信装置は、上記数式1、数式2に示す“オフセット”を、例えば下記の数式3により算出することによって、送信装置における時計と受信装置における時計の時刻差を算出する。そして、IEEE1588 PTP規格に係る方法を用いる受信装置は、算出された時刻差を用いて受信装置における時計を補正することによって、送信装置における時計と受信装置における時計との同期を図る。
オフセット={(t2−t1)−(t4−t3)}×(1/2)
・・・(数式3)
・・・(数式3)
IEEE1588 PTP規格に係る方法が用いられる場合には、例えば上記数式3に示す演算によって、オフセット、すなわち、送信装置における時計と受信装置における時計の時刻差が求められる。しかしながら、送信装置と受信装置との間で通信が行われる実際のネットワークでは、往路の遅延時間と復路の遅延時間とが等しくなる、または、往路の遅延時間と復路の遅延時間との平均値が等しくなる蓋然性は小さい。つまり、往路の遅延時間と復路の遅延時間との平均値が等しいと仮定したとしても、送信装置と受信装置との間で通信が行われる実際のネットワークでは、往路の遅延時間と復路の遅延時間とは、パケットごとに変化している。
よって、IEEE1588 PTP規格に係る方法が用いて算出された、送信装置における時計と受信装置における時計の時刻差(以下、単に「オフセット」と示す場合がある。)を用いたとしても、受信装置における時計の時刻をより正確に修正できるとは限らない。
[II]既存の技術を用いる場合において生じうる問題の解決を図るための方法の一例
ここで、IEEE1588 PTP規格に係る方法が用いられる場合において、パケットごとに変化しうる往路の遅延時間と復路の遅延時間との影響を低減するための方法としては、例えば、算出されたオフセットに対して、ローパスフィルタなどのノイズ除去フィルタを作用させることが考えられる。
ここで、IEEE1588 PTP規格に係る方法が用いられる場合において、パケットごとに変化しうる往路の遅延時間と復路の遅延時間との影響を低減するための方法としては、例えば、算出されたオフセットに対して、ローパスフィルタなどのノイズ除去フィルタを作用させることが考えられる。
図2は、IEEE1588 PTP規格に係る方法が用いられる場合において生じうる問題の解決を図るための受信装置10の構成の一例を示すブロック図である。図2では、送信装置と通信を行う際に介されるネットワーク90を併せて示している。なお、受信装置10は、例えば、ネットワーク90を介さずに、送信装置と直接的に通信を行う構成であってもよい。
ネットワーク90としては、例えば、LAN(Local Area Network)やWAN(Wide Area Network)などの有線ネットワークや、無線LAN(WLAN;Wireless Local Area Network)や基地局を介した無線WAN(WWAN;Wireless Wide Area Network)などの無線ネットワーク、あるいは、TCP/IP(Transmission Control Protocol/Internet Protocol)などの通信プロトコルを用いたインターネットなどが挙げられる。
受信装置10は、例えば、ネットワークインタフェース12と、同期制御パケット受信部14と、往路遅延時間計算部16と、周波数誤差計算部18と、周波数誤差判定部20と、ノイズ除去フィルタ22と、PID制御部24と、同期制御パケット送信部26と、復路遅延時間計算部28と、オフセット計算部30と、ノイズ除去フィルタ32と、PID制御部34と、クロック発生部36と、カウンタ38とを備える。
また、受信装置10は、例えば、MPU(Micro Processing Unit)や各種処理回路などで構成されて受信装置10全体を制御する制御部(図示せず)や、時刻情報を生成する時刻情報生成部(図示せず)を備える。また、受信装置10は、例えば、画像信号などの各種信号を同期して処理するためのタイミング信号を生成するタイミング信号生成部(図示せず)などを備えていてもよい。
ネットワークインタフェース12は、ネットワーク90を介して(または直接的に)送信装置と通信を行う通信手段である。受信装置10は、ネットワークインタフェース12を介して、例えば、図1に示すSync、Follow−up、Delay−responseなどを受信し、図1に示すDelay−requestを送信する。Delay−requestは、同期制御パケット送信部26によって送信される。また、同期制御パケット送信部26は、Delay−requestを送信した時刻t3を示す時刻情報を、復路遅延時間計算部28へ伝達する。
ネットワークインタフェース12としては、例えば、LAN端子および送受信回路や、通信アンテナおよびRF回路、IEEE802.15.1ポートおよび送受信回路、IEEE802.11bポートおよび送受信回路などが挙げられる。
同期制御パケット受信部14は、例えば、ネットワークインタフェース12において受信されたSync、Follow−upを往路遅延時間計算部16に伝達し、ネットワークインタフェース12において受信されたDelay−responseを、復路遅延時間計算部28へ伝達する。
往路遅延時間計算部16は、例えば加算器を備え、上記数式1に示す演算を行う。往路遅延時間計算部16は、数式1の演算結果を、周波数の誤差を算出する周波数誤差計算部18と、オフセットを算出するオフセット計算部30とへ伝達する。
受信装置10は、周波数誤差計算部18に伝達された上記数式1の演算結果が、ノイズ除去フィルタ部22、PID制御部24、クロック発生部36、およびカウンタ38を経由して、往路遅延時間計算部16に戻る制御系を有する。ここで、上記制御系が、受信装置10が備える、送信装置における時計と受信装置における時計とのクロック周波数を一致させる手段に相当する。
ここで、ノイズ除去フィルタ部22は、ローパスフィルタなどのノイズ除去フィルタを備え、周波数誤差計算部18から伝達される周波数の誤差に含まれるノイズを除去する。PID制御部24は、PID(Proportional Integral Derivative)制御を行う。
クロック発生部36は、VCO(Voltage Controlled Oscillator)などで構成され、クロック信号を生成する。ここで、クロック発生部36が生成するクロック信号は、例えば、画像信号などの各種信号の処理に係る処理用のクロックとして用いられる。
カウンタ38は、伝達されるクロック信号に基づいてカウント値を更新する。カウンタ38のカウント値は、例えば、時刻情報生成部(図示せず)における時刻情報の生成や、タイミング信号生成部(図示せず)におけるタイミング信号の生成に用いられる。
周波数誤差計算部18における演算結果は、周波数誤差判定部20にも伝達され、周波数誤差判定部20は、所定の周波数引込み範囲に入ったことが確認できた時点において、PID制御部24とPID制御部34の動作を制御する。周波数誤差判定部20は、受信装置10において、クロック周波数制御を時刻制御に先行させる手段に相当する。
復路遅延時間計算部28は、例えば加算器を備え、上記数式2に示す演算を行う。復路遅延時間計算部28は、数式2の演算結果を、オフセット計算部30とへ伝達する。
オフセット計算部30は、往路遅延時間計算部16から伝達される上記数式1の演算結果、すなわち、往路の遅延時間と、復路遅延時間計算部28から伝達される上記数式2の演算結果、すなわち、復路の遅延時間とに基づいて、オフセットを算出する。オフセット計算部30は、上記数式3に示す演算を行うことによって、オフセットを算出する。
図3は、IEEE1588 PTP規格に係る方法を用いる受信装置10が備えるオフセット計算部30の構成の一例を示すブロック図である。図3では、“Δ21(j)”が、パケットj(jは、正の整数)に対応する往路の遅延時間を示しており、“Δ43(j)”が、パケットjに対応する復路の遅延時間を示している。また、図3では、オフセット計算部30から出力される算出されたオフセットを“Offset”と示している。
オフセット計算部30は、加算器50と、乗算器52とを備える。加算器50は、往路の遅延時間と復路の遅延時間との差分値を算出する。乗算器52は、算出された差分値に対して1/2を乗算する。
なお、オフセット計算部30の構成は、上記に限られない。例えば、オフセット計算部30は、乗算器52の代わりに、算出された差分値を2で除算する除算器を備えていてもよい。
オフセット計算部30は、例えば図3に示す構成によって、上記数式3に示す演算を行う。
再度図2を参照して受信装置10の構成の一例について説明する。受信装置10は、オフセット計算部30における上記数式3の演算結果が、ノイズ除去フィルタ部32、PID制御部34、クロック発生部36、およびカウンタ38を経由して、復路遅延時間計算部28に戻る制御系を有する。
ここで、ノイズ除去フィルタ部32は、ローパスフィルタなどのノイズ除去フィルタを備え、オフセット計算部30から伝達される上記数式3の演算結果、すなわちオフセットに含まれるノイズを除去する。PID制御部34は、PID制御を行う。
受信装置10は、例えば、図2に示す構成によって、IEEE1588 PTP規格に係る方法が実現される。また、受信装置10は、オフセット計算部30における上記数式3の演算結果、すなわちオフセットに対してノイズ除去フィルタ32を作用させるので、パケットごとに変化しうる往路の遅延時間と復路の遅延時間との影響を低減することが可能である。
しかしながら、上記IEEE1588 PTP規格に係る方法が用いられる場合において生じうる問題の解決を図るための方法を用いる場合には、例えば図2に示すように、受信装置10は、ノイズ除去フィルタ32を備える必要があるため、ノイズ除去フィルタ32における処理によって、制御遅れが発生する可能性が高い。また、往路の遅延時間(送信装置から受信装置に至る遅延時間)と復路の遅延時間(受信装置から送信装置に至る遅延時間)との平均値の差異が、オフセットの誤差となりうる。
よって、例えば上記IEEE1588 PTP規格に係る方法が用いられる場合において生じうる問題の解決を図るための方法を用いたとしても、受信装置における時計の時刻をより正確に修正できるとは限らない。
また、上述したように、例えば特許文献1に記載の技術を用いる場合には、遅延時間の最小値を、遅延時間を推定するための条件として予め受信装置に与える必要があり、例えば特許文献1に記載の技術を用いたとしても、与えられる遅延時間の最小値によっては、受信装置における時計の時刻をより正確に修正できるとは限らない。
[III]本実施形態に係る時刻差算出方法の概要
ネットワーク遅延を固定遅延成分と変動遅延成分の2つに分けて考えると、固定遅延成分が、例えばスイッチの出力キュー遅延の影響がない場合における最小遅延時間に相当し、変動遅延成分が、例えばスイッチの出力キュー遅延の影響分に相当する。本実施形態に係る受信装置は、例えば上記IEEE1588 PTP規格に係る方法が用いられる場合において生じうる問題の解決を図るための方法を用いる場合のように、ローパスフィルタなどののノイズ除去フィルタ類を用いず、往路の遅延時間に該当する第1遅延時間と復路の遅延時間に該当する第2遅延時間とにおける固定遅延成分を、論理演算によって“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”(以下、単に「時刻差」と示す場合がある。)として算出する。
より具体的には、本実施形態に係る受信装置は、例えば、下記に示す(1)第1遅延時間算出処理、(2)第2遅延時間算出処理、および(3)時刻差算出処理、によって、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”を算出する。
(1)第1遅延時間算出処理
本実施形態に係る受信装置は、送信信号が受信装置において受信されるまでの時間差を示す第1遅延時間を算出する。本実施形態に係る受信装置は、例えば、送信装置が送信信号を送信した時刻を示す第1時刻情報と、送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、第1遅延時間を算出する。
本実施形態に係る受信装置は、送信信号が受信装置において受信されるまでの時間差を示す第1遅延時間を算出する。本実施形態に係る受信装置は、例えば、送信装置が送信信号を送信した時刻を示す第1時刻情報と、送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、第1遅延時間を算出する。
より具体的には、本実施形態に係る受信装置は、第1遅延時間算出処理に係る処理として、例えば上記数式1に示す演算を行う。上記数式1に示すt1が、第1時刻情報が示す時刻に該当し、上記数式1に示すt2が、第2時刻情報が示す時刻に該当する。つまり、本実施形態に係る第1遅延時間は、往路の遅延時間に該当する。
ここで、本実施形態に係る送信信号としては、例えば、図1に示すSyncが挙げられれ、図1に示すSyncの受信時刻t2を示す時刻情報が、第2時刻情報に該当する。また、例えば、図1に示すFollow−upに含まれるSyncの送信時刻t1を示す時刻情報が、第1時刻情報に該当する。なお、本実施形態に係る送信信号、本実施形態に係る第1時刻情報、および本実施形態に係る第2時刻情報が、図1におけるIEEE1588 PTP規格に係る通信により送受信される信号に適用されることに限られないことは、言うまでもない。
(2)第2遅延時間算出処理
本実施形態に係る受信装置は、受信装置が送信した送信信号に対応する応答信号が、送信装置において受信されるまでの時間差を示す第2遅延時間を算出する。本実施形態に係る受信装置は、例えば、受信装置が応答信号を送信した時刻を示す第3時刻情報と、応答信号が送信装置において受信された時刻を示す第4時刻情報とに基づいて、第2遅延時間を算出する。
本実施形態に係る受信装置は、受信装置が送信した送信信号に対応する応答信号が、送信装置において受信されるまでの時間差を示す第2遅延時間を算出する。本実施形態に係る受信装置は、例えば、受信装置が応答信号を送信した時刻を示す第3時刻情報と、応答信号が送信装置において受信された時刻を示す第4時刻情報とに基づいて、第2遅延時間を算出する。
より具体的には、本実施形態に係る受信装置は、第2遅延時間算出処理に係る処理として、例えば上記数式2に示す演算を行う。上記数式2に示すt3が、第3時刻情報が示す時刻に該当し、上記数式2に示すt4が、第4時刻情報が示す時刻に該当する。つまり、本実施形態に係る第2遅延時間は、復路の遅延時間に該当する。
ここで、本実施形態に係る応答信号としては、例えば、図1に示すDelay−requestが挙げられ、図1に示すDelay−requestの送信時刻t3を示す時刻情報が、第3時刻情報に該当する。また、例えば、図1に示すDelay−responseに含まれるDelay−requestの受信時刻t4を示す時刻情報が、第4時刻情報に該当する。なお、本実施形態に係る応答信号、本実施形態に係る第3時刻情報、および本実施形態に係る第4時刻情報が、図1におけるIEEE1588 PTP規格に係る通信により送受信される信号に適用されることに限られないことは、言うまでもない。
(3)時刻差算出処理
本実施形態に係る受信装置は、上記(1)の処理(第1遅延時間算出処理)において算出された第1遅延時間と、上記(2)の処理(第2遅延時間算出処理)において算出された第2遅延時間とに基づいて、時刻差を算出する。ここで、時刻差を算出する処理では、フィルタが用いられずに、第1遅延時間と第2遅延時間とにおける固定遅延成分が、論理演算により時間差として算出される。また、時刻差を算出する処理では、例えば特許文献1に記載の技術のように、遅延時間の最小値などの事前知識を必要としない。なお、本実施形態に係る時刻差算出処理の具体例については、後述する。
本実施形態に係る受信装置は、上記(1)の処理(第1遅延時間算出処理)において算出された第1遅延時間と、上記(2)の処理(第2遅延時間算出処理)において算出された第2遅延時間とに基づいて、時刻差を算出する。ここで、時刻差を算出する処理では、フィルタが用いられずに、第1遅延時間と第2遅延時間とにおける固定遅延成分が、論理演算により時間差として算出される。また、時刻差を算出する処理では、例えば特許文献1に記載の技術のように、遅延時間の最小値などの事前知識を必要としない。なお、本実施形態に係る時刻差算出処理の具体例については、後述する。
本実施形態に係る受信装置は、本実施形態に係る時刻差算出方法に係る処理として、例えば、上記(1)の処理(第1遅延時間算出処理)、上記(2)の処理(第2遅延時間算出処理)、および上記(3)の処理(時刻差算出処理)を行うことによって、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”を算出する。
ここで、本実施形態に係る受信装置は、上記(3)の処理(時刻差算出処理)において、フィルタを用いずに、第1遅延時間と第2遅延時間とにおける固定遅延成分を、論理演算により時間差として算出する。よって、本実施形態に係る受信装置は、例えば上記IEEE1588 PTP規格に係る方法が用いられる場合において生じうる問題の解決を図るための方法が用いられる場合のような、フィルタを用いた処理による制御遅れや、オフセットの誤差の発生を防止することができる。
また、本実施形態に係る受信装置は、上記(3)の処理(時刻差算出処理)において、遅延時間の最小値などの事前知識を必要としないので、例えば特許文献1に記載の技術が用いられる場合よりも、より正確に時刻差を算出することができる可能性が高い。
したがって、本実施形態に係る受信装置は、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を、より正確に算出することができる。
なお、本実施形態に係る時刻差算出方法に係る処理は、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)に限られない。
例えば、本実施形態に係る受信装置は、上記(3)の処理(時刻差算出処理)により算出される時刻差に基づいて、受信装置における時計の時刻を補正する処理をさらに行ってもよい(補正処理)。
ここで、本実施形態に係る補正処理としては、例えば、算出される時刻差に基づいて、カウンタにおけるカウンタの値を制御するクロック信号を調整する処理(間接的にカウンタの値を補正する処理)や、算出される時刻差に基づいて、カウンタの値を書き換える処理(直接的にカウンタの値を補正する処理)が挙げられる。
例えば図2を参照して示したように、受信装置が備えるカウンタの値(カウント値)は、時刻情報の生成に用いられる。よって、本実施形態に係る受信装置は、本実施形態に係る補正処理においてカウンタの値を、間接的または直接的に変えることによって、受信装置における時計の時刻を補正することができる。
(本実施形態に係る受信装置)
次に、上述した本実施形態に係る時刻差算出方法に係る処理を行うことが可能な、本実施形態に係る受信装置の構成の一例について説明する。
次に、上述した本実施形態に係る時刻差算出方法に係る処理を行うことが可能な、本実施形態に係る受信装置の構成の一例について説明する。
以下では、本実施形態に係る受信装置と送信装置とが、例えば図1に示すIEEE1588 PTP規格に係る信号の送受信を行う場合を例に挙げる。なお、本実施形態に係る受信装置と送信装置との間で送受信される信号が、図1に示すIEEE1588 PTP規格に係る信号に限られないことは、言うまでもない。
[1]第1の実施形態に係る受信装置
図4は、第1の実施形態に係る受信装置100の構成の一例を示すブロック図である。図4では、送信装置と通信を行う際に介されるネットワーク90を併せて示している。なお、受信装置100は、例えば、ネットワーク90を介さずに、送信装置と直接的に通信を行う構成であってもよい。
図4は、第1の実施形態に係る受信装置100の構成の一例を示すブロック図である。図4では、送信装置と通信を行う際に介されるネットワーク90を併せて示している。なお、受信装置100は、例えば、ネットワーク90を介さずに、送信装置と直接的に通信を行う構成であってもよい。
受信装置100は、例えば、ネットワークインタフェース102と、同期制御パケット受信部104と、往路遅延時間計算部106(第1遅延時間算出部)と、周波数誤差計算部108と、周波数誤差判定部110と、ノイズ除去フィルタ112と、PID制御部114と、同期制御パケット送信部116と、復路遅延時間計算部118(第2遅延時間算出部)と、オフセット計算部120(時刻差算出部)と、PID制御部122と、クロック発生部124と、カウンタ126とを備える。
また、受信装置100は、例えば、MPUや各種処理回路などで構成されて受信装置100全体を制御する制御部(図示せず)や、時刻情報を生成する時刻情報生成部(図示せず)を備える。また、受信装置100は、例えば、画像信号などの各種信号を同期して処理するためのタイミング信号を生成するタイミング信号生成部(図示せず)などを備えていてもよい。
ここで、図4では、往路遅延時間計算部106、復路遅延時間計算部118、およびオフセット計算部120が、本実施形態に係る時刻差算出方法に係る上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)を行う役目を果たす。
また、図4では、例えば、PID制御部122、クロック発生部124、およびカウンタ126が、本実施形態に係る時刻差算出方法に係る補正処理を行う補正部128の役目を果たす。
また、ネットワークインタフェース102、同期制御パケット受信部104、周波数誤差計算部108、周波数誤差判定部110、ノイズ除去フィルタ112、PID制御部114、同期制御パケット送信部116は、例えば、図2に示すネットワークインタフェース12、同期制御パケット受信部14、周波数誤差計算部18、周波数誤差判定部20、ノイズ除去フィルタ22、PID制御部24、同期制御パケット送信部26と、それぞれ同様の構成、機能を有する。
以下、受信装置100における、本実施形態に係る時刻差算出方法に係る構成要素について説明し、図2に示す受信装置10と同様の機能、構成を有する構成要素については、説明を省略する。
[1−1]送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)の算出に係る構成について
往路遅延時間計算部106は、上記(1)の処理(第1遅延時間算出処理)を行う役目を果たし、第1時刻情報が示す時刻t1と、第2時刻情報が示す時刻t2とに基づいて、第1遅延時間を算出する。
[1−1]送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)の算出に係る構成について
往路遅延時間計算部106は、上記(1)の処理(第1遅延時間算出処理)を行う役目を果たし、第1時刻情報が示す時刻t1と、第2時刻情報が示す時刻t2とに基づいて、第1遅延時間を算出する。
より具体的には、往路遅延時間計算部106は、例えば、加算器を備え、後述する数式4(上記数式1に相当する数式)に示す演算を行う。そして、往路遅延時間計算部106は、後述する数式4の演算結果Δ21(j)を、第1遅延時間としてオフセット計算部120などへ伝達する。
復路遅延時間計算部118は、上記(2)の処理(第2遅延時間算出処理)を行う役目を果たし、第3時刻情報が示す時刻t3と、第4時刻情報が示す時刻t4とに基づいて、第2遅延時間を算出する。
より具体的には、復路遅延時間計算部118は、例えば、加算器を備え、後述する数式5(上記数式2に相当する数式)に示す演算を行う。そして、復路遅延時間計算部118は、後述する数式5の演算結果Δ43(j)を、第2遅延時間としてオフセット計算部120へ伝達する。
オフセット計算部120は、上記(3)の処理(時刻差算出処理)を行う役目を果たし、往路遅延時間計算部106において算出された第1遅延時間と、復路遅延時間計算部118において算出された第2遅延時間とに基づいて、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”を算出する。
以下、受信装置100における本実施形態に係る時刻差算出方法に係る処理について、より具体的に説明する。
受信装置100では、本実施形態に係る時刻差算出方法に係る処理に際して、例えば下記に示す仮定がおかれる。
・仮定1
周波数制御が完了し、送信装置と受信装置とのクロック周波数が一致した状態で安定している。
・仮定2
ネットワーク遅延は、固定遅延成分(以下、「fixed_delay」と示す場合がある。)と変動遅延成分(以下、「variable_delay」と示す場合がある。)との2つに分類される。
・仮定3
fixed_delayは、通信方向に依存しない。
・仮定1
周波数制御が完了し、送信装置と受信装置とのクロック周波数が一致した状態で安定している。
・仮定2
ネットワーク遅延は、固定遅延成分(以下、「fixed_delay」と示す場合がある。)と変動遅延成分(以下、「variable_delay」と示す場合がある。)との2つに分類される。
・仮定3
fixed_delayは、通信方向に依存しない。
また、以下では“t1(j)”、“t2(j)”、“t3(j)”、“t4(j)”、“delay_ms(j)”、“delay_sm(j)”、および“Offset”を、それぞれ下記のような意味で用いる。
・t1(j) :j番目のsync送信時刻
・t2(j) :j番目のsync受信時刻
・t3(j) :j番目のDelay−request送信時刻
・t4(j) :j番目のDelay−request受信時刻
・delay_ms(j) :j番目の往路の遅延時間(送信装置から受信装置方向の遅延時間)
・delay_sm(j) :j番目の復路の遅延時間(受信装置から送信装置方向の遅延時間)
・Offset:送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)
・t1(j) :j番目のsync送信時刻
・t2(j) :j番目のsync受信時刻
・t3(j) :j番目のDelay−request送信時刻
・t4(j) :j番目のDelay−request受信時刻
・delay_ms(j) :j番目の往路の遅延時間(送信装置から受信装置方向の遅延時間)
・delay_sm(j) :j番目の復路の遅延時間(受信装置から送信装置方向の遅延時間)
・Offset:送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)
[1−1−1]往路遅延時間計算部106、復路遅延時間計算部118における処理の具体例
上記仮定1より、下記の数式4、および数式5が成立する。往路遅延時間計算部106は、下記に示す数式4に示す演算を行うことにより第1遅延時間を算出する。また、復路遅延時間計算部118は、下記に示す数式5に示す演算を行うことにより第2遅延時間を算出する。
上記仮定1より、下記の数式4、および数式5が成立する。往路遅延時間計算部106は、下記に示す数式4に示す演算を行うことにより第1遅延時間を算出する。また、復路遅延時間計算部118は、下記に示す数式5に示す演算を行うことにより第2遅延時間を算出する。
Δ21(j)=delay_ms(j)+offset=t2(j)−t1(j)
・・・(数式4)
・・・(数式4)
Δ43(j)=delay_sm(j)−offset=t4(j)−t3(j)
・・・(数式5)
・・・(数式5)
[1−1−2]オフセット計算部120における処理の具体例
図5は、第1の実施形態に係る受信装置100が備えるオフセット計算部120の構成の一例を示すブロック図である。図5では、往路遅延時間計算部106から伝達される第1遅延時間を“Δ21(j)”と示し、また、復路遅延時間計算部118から伝達される第2遅延時間を“Δ43(j)”と示している。また、図5では、オフセット計算部120から出力される算出された時間差(オフセット)を“Offset”と示している。
図5は、第1の実施形態に係る受信装置100が備えるオフセット計算部120の構成の一例を示すブロック図である。図5では、往路遅延時間計算部106から伝達される第1遅延時間を“Δ21(j)”と示し、また、復路遅延時間計算部118から伝達される第2遅延時間を“Δ43(j)”と示している。また、図5では、オフセット計算部120から出力される算出された時間差(オフセット)を“Offset”と示している。
オフセット計算部120は、最小値ホールド部150(第1最小値保持部)と、最小値ホールド部152(第2最小値保持部)と、算出部154とを備える。
最小値ホールド部150は、ホールド回路などで構成され、往路遅延時間計算部106において算出された第1遅延時間の最小値を保持する。そして、最小値ホールド部150は、保持されている第1遅延時間の最小値Min(Δ21)を出力する。
最小値ホールド部152は、ホールド回路などで構成され、復路遅延時間計算部118において算出された第2遅延時間の最小値を保持する。そして、最小値ホールド部152は、保持されている第2遅延時間の最小値Min(Δ43)を出力する。
算出部154は、第1遅延時間の最小値Min(Δ21)と、第2遅延時間の最小値Min(Δ43)とに基づいて、時刻差(オフセット)を算出する。
算出部154は、例えば、加算器156と乗算器158とを備える。ここで、図5に示す算出部154と、図3に示すオフセット計算部30とを比較すると、算出部154とオフセット計算部30とは、同様の構成を有していることが分かる。つまり、算出部154は、第1遅延時間の最小値Min(Δ21)と第2遅延時間の最小値Min(Δ43)とを用いて、図3に示すオフセット計算部30と同様の演算を行うことによって、時間差を算出する。より具体的には、算出部154は、例えば、後述する数式10に示す演算を行うことによって、時刻差を算出する。
なお、算出部154の構成は、上記に限られない。例えば、算出部154は、乗算器158の代わりに、算出された差分値を2で除算する除算器を備えていてもよい。
以下、オフセット計算部120における処理について、より具体的に説明する。
上記仮定2および上記仮定3より、下記の数式6、および数式7が成立する。
delay_ms(j)=fixed_delay+variable_delay_ms(j)
・・・(数式6)
・・・(数式6)
delay_sm(j)=fixed_delay+variable_delay_sm(j)
・・・(数式7)
・・・(数式7)
オフセット計算部120が、最小値ホールド部150と最小値ホールド部152とを備えることによって、オフセット計算部120では、Δ21(j)の最小値を更新していく新たなサンプル系列min{Δ21(j)}と、Δ43(j)の最小値を更新していく新たなサンプル系列min{Δ43(j)}が導入される。
ここで、サンプル系列min{Δ21(j)}およびサンプル系列min{Δ43(j)}は、次第に“variable_delay_ms=0”に近づくことになるため、最終的には“delay_ms=delay_sm=fixed_delay”が成立することになる。よって、例えば下記の数式8、および数式9が成立する。
min{Δ21}=fixed_delay+offset
・・・(数式8)
・・・(数式8)
min{Δ43}=fixed_delay−offset
・・・(数式9)
・・・(数式9)
上記数式8および上記数式9より、下記の数式10が得られる。算出部154は、下記の数式10に示す演算を行うことによって、時刻差を算出する。
offset={Min(Δ21)−Min(Δ43)}×(1/2)
・・・(数式10)
・・・(数式10)
図6〜図8は、第1の実施形態に係る受信装置100が備えるオフセット計算部120における処理の過程の一例を示す説明図である。ここで、図6〜図8は、時間差(オフセット)=0となるサンプルデータを用いたグラフであり、縦軸が遅延時間、横軸がサンプル番号を表している。図6は、Δ21(j)とmin{Δ21(j)}との様子を示しており、図7は、Δ43(j)とmin{Δ43(j)}との様子を示している。また、図8は、上記数式10により算出されるOffset(すなわち、時間差)の様子を示している。
例えば図8に示すように、オフセット計算部120において算出される時間差(オフセット)は、0に収束することが分かる。
[1−2]補正処理に係る構成について
補正部128は、オフセット計算部120において算出される時刻差に基づいて、受信装置100における時計の時刻を補正する。
補正部128は、オフセット計算部120において算出される時刻差に基づいて、受信装置100における時計の時刻を補正する。
補正部128は、例えば、PID制御部122と、クロック発生部124と、カウンタ126とで構成される。ここで、PID制御部122、クロック発生部124、およびカウンタ126は、例えば、図2に示すPID制御部34、クロック発生部36、およびカウンタ38と同様の機能、構成を有する。
補正部128は、オフセット計算部120において算出される時刻差に基づいて、カウンタ126におけるカウンタの値を制御するクロック信号を調整する。つまり、補正部128は、オフセット計算部120において算出される時刻差に基づいて、クロック発生部124が発生させるクロック信号を調整することによって、カウンタ126におけるカウンタの値を間接的に変える。
ここで、例えば図2を参照して示したように、受信装置100が備えるカウンタの値(カウント値)は、時刻情報の生成に用いられる。よって、カウンタ126におけるカウンタの値を間接的に変えることによって、補正部128は、受信装置100における時計の時刻を補正することができる。
第1の実施形態に係る受信装置100は、例えば図4に示す構成によって、本実施形態に係る時刻差算出方法に係る処理(例えば、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理)を行う。
したがって、第1の実施形態に係る受信装置100は、例えば図4に示す構成によって、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することができる。
また、第1の実施形態に係る受信装置100では、時刻差の算出に際してフィルタが用いられず、また、遅延時間の最小値などの事前知識も必要としない。よって、第1の実施形態に係る受信装置100は、例えば図4に示す構成によって、フィルタを用いた処理による制御遅れや、オフセットの誤差の発生を防止することができ、また、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を、より正確に算出することができる。
なお、第1の実施形態に係る受信装置の構成は、図4に示す構成に限られない。
例えば、第1の実施形態に係る受信装置は、本実施形態に係る時刻差算出方法に係る処理(例えば、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)”、または、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理”)を行う構成要素で構成される、時刻差算出装置であってもよい。第1の実施形態に係る受信装置が上記時刻差算出装置である場合、例えば、第1の実施形態に係る受信装置が、送信装置と通信を行う受信装置に組み込まれることによって、図4に示す構成が得られる。
[2]第2の実施形態に係る受信装置
図9は、第2の実施形態に係る受信装置200の構成の一例を示すブロック図である。図9では、送信装置と通信を行う際に介されるネットワーク90を併せて示している。なお、受信装置200は、例えば、ネットワーク90を介さずに、送信装置と直接的に通信を行う構成であってもよい。
図9は、第2の実施形態に係る受信装置200の構成の一例を示すブロック図である。図9では、送信装置と通信を行う際に介されるネットワーク90を併せて示している。なお、受信装置200は、例えば、ネットワーク90を介さずに、送信装置と直接的に通信を行う構成であってもよい。
受信装置200は、例えば、ネットワークインタフェース102と、同期制御パケット受信部104と、往路遅延時間計算部106(第1遅延時間算出部)と、周波数誤差計算部108と、周波数誤差判定部110と、ノイズ除去フィルタ112と、PID制御部114と、同期制御パケット送信部116と、復路遅延時間計算部118(第2遅延時間算出部)と、オフセット計算部202(時刻差算出部)と、カウンタ値書換部204と、クロック発生部124と、カウンタ126とを備える。
また、受信装置200は、例えば、MPUや各種処理回路などで構成されて受信装置200全体を制御する制御部(図示せず)や、時刻情報を生成する時刻情報生成部(図示せず)を備える。また、受信装置200は、例えば、画像信号などの各種信号を同期して処理するためのタイミング信号を生成するタイミング信号生成部(図示せず)などを備えていてもよい。
ここで、図9では、往路遅延時間計算部106、復路遅延時間計算部118、およびオフセット計算部202が、本実施形態に係る時刻差算出方法に係る上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)を行う役目を果たす。
また、図9では、例えば、カウンタ値書換部204、およびカウンタ126が、本実施形態に係る時刻差算出方法に係る補正処理を行う補正部206の役目を果たす。
また、ネットワークインタフェース102、同期制御パケット受信部104、周波数誤差計算部108、ノイズ除去フィルタ112、PID制御部114、同期制御パケット送信部116、クロック発生部124は、例えば、図2に示すネットワークインタフェース12、同期制御パケット受信部14、周波数誤差計算部18、ノイズ除去フィルタ22、PID制御部24、同期制御パケット送信部26、およびクロック発生部36と、それぞれ同様の構成、機能を有する。また、周波数誤差判定部110は、周波数誤差計算部108から伝達される周波数誤差計算部108の計算結果に基づいて、所定の周波数引込み範囲に入ったことが確認できた時点において、カウンタ値書換部204の動作を制御する。周波数誤差判定部110は、受信装置200において、クロック周波数制御を時刻制御に先行させる手段に相当する。
以下、受信装置200における、本実施形態に係る時刻差算出方法に係る構成要素について説明し、図2に示す受信装置10と同様の機能、構成を有する構成要素については、説明を省略する。
[2−1]送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)の算出に係る構成について
往路遅延時間計算部106は、図4に示す第1の実施形態に係る往路遅延時間計算部106と同様の機能、構成を有し、上記(1)の処理(第1遅延時間算出処理)を行う役目を果たす。往路遅延時間計算部106は、第1時刻情報が示す時刻t1と、第2時刻情報が示す時刻t2とに基づいて、第1遅延時間を算出する。
[2−1]送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)の算出に係る構成について
往路遅延時間計算部106は、図4に示す第1の実施形態に係る往路遅延時間計算部106と同様の機能、構成を有し、上記(1)の処理(第1遅延時間算出処理)を行う役目を果たす。往路遅延時間計算部106は、第1時刻情報が示す時刻t1と、第2時刻情報が示す時刻t2とに基づいて、第1遅延時間を算出する。
復路遅延時間計算部118は、図4に示す第1の実施形態に係る復路遅延時間計算部118と同様の機能、構成を有し、上記(2)の処理(第2遅延時間算出処理)を行う役目を果たす。復路遅延時間計算部118は、第3時刻情報が示す時刻t3と、第4時刻情報が示す時刻t4とに基づいて、第2遅延時間を算出する。
オフセット計算部202は、上記(3)の処理(時刻差算出処理)を行う役目を果たし、往路遅延時間計算部106において算出された第1遅延時間と、復路遅延時間計算部118において算出された第2遅延時間とに基づいて、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”を算出する。
以下、受信装置200における本実施形態に係る時刻差算出方法に係る処理について、より具体的に説明する。
受信装置200では、本実施形態に係る時刻差算出方法に係る処理に際して、例えば下記に示す仮定がおかれる。
・仮定1
周波数制御が完了し、送信装置と受信装置とのクロック周波数が一致した状態で安定している。
・仮定2
ネットワーク遅延は、固定遅延成分(以下、「fixed_delay」と示す場合がある。)と変動遅延成分(以下、「variable_delay」と示す場合がある。)との2つに分類される。
・仮定3
fixed_delayは、通信方向に依存しない。
・仮定1
周波数制御が完了し、送信装置と受信装置とのクロック周波数が一致した状態で安定している。
・仮定2
ネットワーク遅延は、固定遅延成分(以下、「fixed_delay」と示す場合がある。)と変動遅延成分(以下、「variable_delay」と示す場合がある。)との2つに分類される。
・仮定3
fixed_delayは、通信方向に依存しない。
また、以下では“t1(j)”、“t2(j)”、“t3(j)”、“t4(j)”、“delay_ms(j)”、“delay_sm(j)”、および“Offset”を、それぞれ下記のような意味で用いる。
・t1(j) :j番目のsync送信時刻
・t2(j) :j番目のsync受信時刻
・t3(j) :j番目のDelay−request送信時刻
・t4(j) :j番目のDelay−request受信時刻
・delay_ms(j) :j番目の往路の遅延時間(送信装置から受信装置方向の遅延時間)
・delay_sm(j) :j番目の復路の遅延時間(受信装置から送信装置方向の遅延時間)
・Offset:送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)
・t1(j) :j番目のsync送信時刻
・t2(j) :j番目のsync受信時刻
・t3(j) :j番目のDelay−request送信時刻
・t4(j) :j番目のDelay−request受信時刻
・delay_ms(j) :j番目の往路の遅延時間(送信装置から受信装置方向の遅延時間)
・delay_sm(j) :j番目の復路の遅延時間(受信装置から送信装置方向の遅延時間)
・Offset:送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差(オフセット)
[2−1−1]往路遅延時間計算部106、復路遅延時間計算部118における処理の具体例
上記仮定1より、上記数式4、および上記数式5が成立する。往路遅延時間計算部106は、図4に示す第1の実施形態に係る往路遅延時間計算部106と同様に、上記数式4に示す演算を行うことにより第1遅延時間を算出する。また、復路遅延時間計算部118は、図4に示す第1の実施形態に係る復路遅延時間計算部118と同様に、上記数式5に示す演算を行うことにより第2遅延時間を算出する。
上記仮定1より、上記数式4、および上記数式5が成立する。往路遅延時間計算部106は、図4に示す第1の実施形態に係る往路遅延時間計算部106と同様に、上記数式4に示す演算を行うことにより第1遅延時間を算出する。また、復路遅延時間計算部118は、図4に示す第1の実施形態に係る復路遅延時間計算部118と同様に、上記数式5に示す演算を行うことにより第2遅延時間を算出する。
[2−1−2]オフセット計算部202における処理の具体例
図10は、第2の実施形態に係る受信装置200が備えるオフセット計算部202の構成の一例を示すブロック図である。図10では、往路遅延時間計算部106から伝達される第1遅延時間を“Δ21(j)”と示し、また、復路遅延時間計算部118から伝達される第2遅延時間を“Δ43(j)”と示している。また、図10では、オフセット計算部202から出力される算出された時間差(オフセット)を“Offset”と示している。
図10は、第2の実施形態に係る受信装置200が備えるオフセット計算部202の構成の一例を示すブロック図である。図10では、往路遅延時間計算部106から伝達される第1遅延時間を“Δ21(j)”と示し、また、復路遅延時間計算部118から伝達される第2遅延時間を“Δ43(j)”と示している。また、図10では、オフセット計算部202から出力される算出された時間差(オフセット)を“Offset”と示している。
オフセット計算部202は、第1サンプル間時間差算出部210と、第1シフト値算出部212と、第1差分値算出部214と、第2サンプル間時間差算出部216と、第2シフト値算出部218と、第2差分値算出部220と、算出部222とを備える。
第1サンプル間時間差算出部210は、例えば、遅延器224と、加算器226とを備え、時間的に連続する、算出された第1遅延時間のサンプル間における時間差を算出する。図10では、第1遅延時間のサンプル間における時間差を“Δ21(j)−Δ21(j−1)”と示している。
第1シフト値算出部212は、第1サンプル間時間差算出部210において算出された、第1遅延時間のサンプル間における時間差を累積する。そして、第1シフト値算出部212は、累積された累積値が所定値分シフトされた第1シフト値を算出する。本実施形態に係る第1シフト値の一例については、後述する。また、第1シフト値算出部212は、例えば、累積演算とシフト演算とが可能な任意の構成の回路で構成される。図10では、第1シフト値を“Shift[Σ21(j)]”と示している。
第1差分値算出部214は、例えば加算器を備え、往路遅延時間計算部106において算出された第1遅延時間と、第1シフト値との差分値である、第1差分値を出力する。
第2サンプル間時間差算出部216は、例えば、遅延器228と、加算器230とを備え、時間的に連続する、算出された第2遅延時間のサンプル間における時間差を算出する。図10では、第2遅延時間のサンプル間における時間差を“Δ43(j)−Δ43(j−1)”と示している。
第2シフト値算出部218は、第2サンプル間時間差算出部216において算出された、第2遅延時間のサンプル間における時間差を累積する。そして、第2シフト値算出部218は、累積された累積値が所定値分シフトされた第2シフト値を算出する。本実施形態に係る第2シフト値の一例については、後述する。また、第2シフト値算出部218は、例えば、累積演算とシフト演算とが可能な任意の構成の回路で構成される。また、第2シフト値算出部218は、例えば、累積が可能な任意の構成の回路で構成される。図10では、第2シフト値を“Shift[Σ43(j)]”と示している。
第2差分値算出部220は、例えば加算器を備え、復路遅延時間計算部118において算出された第2遅延時間と、第2シフト値との差分値である、第2差分値を出力する。
算出部222は、第1差分値と第2差分値とに基づいて、時刻差(オフセット)を算出する。
算出部222は、例えば、加算器232と乗算器234とを備える。ここで、図10に示す算出部222と、図5に示す算出部154とを比較すると、算出部222と算出部154とは、同様の構成を有していることが分かる。つまり、算出部222は、第1差分値と第2差分値とを用いて、図5に示す算出部154と同様の演算を行うことによって、時間差を算出する。より具体的には、算出部222は、例えば、後述する数式21に示す演算を行うことによって、時刻差を算出する。
なお、算出部222の構成は、上記に限られない。例えば、算出部222は、乗算器234の代わりに、算出された差分値を2で除算する除算器を備えていてもよい。
以下、オフセット計算部120における処理について、より具体的に説明する。
上記仮定2および上記仮定3より、上記数式6、および上記数式7が成立する。
オフセット計算部120が、第1サンプル間時間差算出部210と第2サンプル間時間差算出部216とを備えることによって、オフセット計算部202では、下記の数式11で表されるjitter_ms(j)と、下記の数式12で表されるjitter_sm(j)とが導入される。
jitter_ms(j)=Δ21(j)−Δ21(j−1)=delay_ms(j)−delay_ms(j−1)
・・・(数式11)
・・・(数式11)
jitter_sm(j)=Δ43(j)−Δ43(j−1)=delay_sm(j)−delay_sm(j−1)
・・・(数式12)
・・・(数式12)
オフセット計算部120が、第1シフト値算出部212と第2シフト値算出部218とを備えることによって、オフセット計算部202では、下記の数式13で表されるjitter_ms(j)の累積加算と、下記の数式14で表されるjitter_sm(j)の累積加算とが、導入される。また、下記の数式13、数式14では、累積加算Σが、n=2からjの範囲で定義されている。
Σjitter_ms(j)
={delay_ms(2)−delay_ms(1)} +{delay_ms(3)−delay_ms(2)}+{delay_ms(4)−delay_ms(3)}+…+{delay_ms(j)−delay_ms(j−1)}
=delay_ms(j)−delay_ms(1)
・・・(数式13)
={delay_ms(2)−delay_ms(1)} +{delay_ms(3)−delay_ms(2)}+{delay_ms(4)−delay_ms(3)}+…+{delay_ms(j)−delay_ms(j−1)}
=delay_ms(j)−delay_ms(1)
・・・(数式13)
Σjitter_sm(j)
={delay_sm(2)−delay_sm(1)}+{delay_sm(3)−delay_sm(2)}+{delay_sm(4)−delay_sm(3)}+…+{delay_sm(j)−delay_sm(j−1)}
=delay_sm(j)−delay_sm(1)
・・・(数式14)
={delay_sm(2)−delay_sm(1)}+{delay_sm(3)−delay_sm(2)}+{delay_sm(4)−delay_sm(3)}+…+{delay_sm(j)−delay_sm(j−1)}
=delay_sm(j)−delay_sm(1)
・・・(数式14)
上記数式13に示すように、Σjitter_ms(j)は、累積加算処理の初期値分だけシフトしたdelay_ms(j)である。また、上記数式14に示すように、Σjitter_sm(j)は、累積加算処理の初期値分だけシフトしたdelay_sm(j)である。
また、オフセット計算部120が、第1シフト値算出部212と第2シフト値算出部218とを備えることによって、オフセット計算部202では、“min{Σjitter_ms(j)}=0”を保持してシフト演算したshift[Σjitter_ms(j)]と、“min{Σjitter_sm(j)}=0”を保持してシフト演算したshift[Σjitter_sm(j)]とが導入される。
ここで、shift[Σjitter_ms(j)]は、上記数式6に示すvariable_delay_ms(j)に相当し、また、shift[Σjitter_sm(j)]は、上記数式7に示すvariable_delay_sm(j)に相当する。よって、shift[Σjitter_ms(j)]とvariable_delay_ms(j)との間では、下記の数式15に示す関係が成立し、また、shift[Σjitter_sm(j)]とvariable_delay_sm(j)との間では、下記の数式16に示す関係が成立する。
shift[Σjitter_ms(j)]=variable_delay_ms(j)
・・・(数式15)
・・・(数式15)
shift[Σjitter_sm(j)]=variable_delay_sm(j)
・・・(数式16)
・・・(数式16)
上記仮定1に基づく上記数式4および上記数式5と、上記仮定2および上記仮定3に基づく上記数式6および上記数式7と、上記数式15および上記数式16とから、下記の数式17、および数式18が得られる。ここで、下記の数式17に示す“Δ21(j)”は、第1差分値に該当し、下記の数式18に示す“Δ43(j)”は、第2差分値に該当する。つまり、第1差分値算出部214は、下記の数式17に示す演算を行うことによって、第1差分値を算出し、また、第2差分値算出部220は、下記の数式18に示す演算を行うことによって、第2差分値を算出する。
Δ21(j)=fixed_delay+offset+shift[Σjitter_ms(j)]
・・・(数式17)
・・・(数式17)
Δ43(j)=fixed_delay−offset+shift[Σjitter_sm(j)]
・・・(数式18)
・・・(数式18)
上記数式17より下記の数式19が得られ、また、上記数式18より下記の数式20が得られる。また、下記の数式19および数式20より、下記の数式21が得られる。算出部222は、下記の数式21に示す演算を行うことによって、時刻差(オフセット)を算出する。
offset=Δ21(j)−shift[Σjitter_ms(j)]− fixed_delay
・・・(数式19)
・・・(数式19)
offset=−Δ43(j)+shift[Σjitter_sm(j)]+fixed_delay
・・・(数式20)
・・・(数式20)
offset=[{Δ21(j)−shift[Σjitter_ms(j)]}−{Δ43(j)−shift[Σjitter_sm(j)]}]×(1/2)
・・・(数式21)
・・・(数式21)
図11〜図13は、第2の実施形態に係る受信装置200が備えるオフセット計算部202における処理の過程の一例を示す説明図である。ここで、図11〜図13は、時間差(オフセット)=0となるサンプルデータを用いたグラフであり、縦軸が遅延時間、横軸がサンプル番号を表している。図11は、Δ21(j)と、shift[Σjitter_ms(j)]とΔ21(j)−shift[Σjitter_ms(j)]との様子を示しており、図12は、Δ43(j)と、shift[Σjitter_sm(j)]と、Δ43(j)−shift[Σjitter_sm(j)]との様子を示している。また、図13は、上記数式21により算出されるOffset(すなわち、時間差)の様子を示している。
例えば図13に示すように、オフセット計算部202において算出される時間差(オフセット)は、0に収束することが分かる。
図14、図15は、第2の実施形態に係る受信装置200が備えるオフセット計算部202における処理と、図2に示す受信装置10が備えるオフセット計算部30およびノイズ除去フィルタ部32における処理とのシミュレーション結果の一例を示す説明図である。
図14では、受信装置10が、ノイズ除去フィルタ部32として、128サンプル移動平均フィルタ(ローパスフィルタ)を備える場合のシミュレーション結果を示している。また、図14では、往路方向(送信装置から受信装置方向)と、復路方向(受信装置から送信装置方向)の遅延の固定成分(すなわち、最少遅延)が等しく、かつ、遅延の平均値が11.7マイクロ秒だけ異なる実測データを、オフセット値=4マイクロ秒になるよう調整したデータを用いた場合における、シミュレーション結果を示している。
受信装置10が用いられる場合には、128サンプル移動平均フィルタを用いることに起因して、計算が有効になるのは128サンプル以降である。そのため、図14に示すように、受信装置10が用いられる場合には制御遅れが発生する。図14では、1〜127サンプル区間も欠損データ=0として計算した結果もプロットすることによって、受信装置200と受信装置10とにおける、オフセットの値の収束状況の違いを表している。
また、受信装置10が用いられる場合、図14に示すように、受信装置10において128サンプル移動平均フィルタから出力されるオフセットの値は、受信装置200が備えるオフセット計算部202から出力されるオフセットの値と比較して、遅延の平均値の1/2(すなわち、5.85マイクロ秒)の誤差を含んでいることが分かる。
図15では、図14と同様に、受信装置10が、ノイズ除去フィルタ部32として、128サンプル移動平均フィルタ(ローパスフィルタ)を備える場合のシミュレーション結果を示している。また、図15では、往路方向(送信装置から受信装置方向)と、復路方向(受信装置から送信装置方向)の遅延の固定成分(すなわち、最少遅延)が等しい実測データを、遅延の平均値も等しくなるように、また、オフセット値=4マイクロ秒になるよう調整したデータを用いた場合における、シミュレーション結果を示している。
遅延の平均値が等しい場合には、受信装置10を用いたとしても、図14で観測されたような誤差は含まれていない。しかしながら、図15に示すように、受信装置10において128サンプル移動平均フィルタから出力されるオフセットの値は、受信装置200が備えるオフセット計算部202から出力されるオフセットの値と比較して、遅延の変動成分が抑制されていないことが分かる。なお、図15では、図14と同様に、1〜127サンプル区間も欠損データ=0として計算した結果もプロットすることによって、受信装置200と受信装置10とにおける、オフセットの値の収束状況の違いを表している。
[2−2]補正処理に係る構成について
補正部206は、オフセット計算部120において算出される時刻差に基づいて、受信装置200における時計の時刻を補正する。
補正部206は、オフセット計算部120において算出される時刻差に基づいて、受信装置200における時計の時刻を補正する。
補正部206は、例えば、カウンタ値書換部204と、カウンタ126とで構成される。ここで、カウンタ値書換部204は、オフセット計算部202において算出される時刻差に基づいて、カウンタ126におけるカウンタの値を書き換える。また、カウンタ126は、例えば、図2に示すカウンタ38と同様の機能、構成を有する。
補正部206は、オフセット計算部202において算出される時刻差に基づいて、カウンタ126におけるカウンタの値を書き換える。つまり、補正部206は、オフセット計算部202において算出される時刻差に基づいて、カウンタ126におけるカウンタの値を直接的に変える。
ここで、例えば図2を参照して示したように、受信装置100が備えるカウンタの値(カウント値)は、時刻情報の生成に用いられる。よって、カウンタ126におけるカウンタの値を直接的に変えることによって、補正部206は、受信装置200における時計の時刻を補正することができる。
第2の実施形態に係る受信装置200は、例えば図9に示す構成によって、本実施形態に係る時刻差算出方法に係る処理(例えば、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理)を行う。
したがって、第2の実施形態に係る受信装置200は、例えば図9に示す構成によって、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することができる。
また、第2の実施形態に係る受信装置200では、時刻差の算出に際してフィルタが用いられず、また、遅延時間の最小値などの事前知識も必要としない。よって、第2の実施形態に係る受信装置200は、例えば図9に示す構成によって、フィルタを用いた処理による制御遅れや、オフセットの誤差の発生を防止することができ、また、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を、より正確に算出することができる。
なお、第2の実施形態に係る受信装置の構成は、図9に示す構成に限られない。
例えば、第2の実施形態に係る受信装置は、本実施形態に係る時刻差算出方法に係る処理(例えば、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)”、または、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理”)を行う構成要素で構成される、時刻差算出装置であってもよい。第2の実施形態に係る受信装置が上記時刻差算出装置である場合、例えば、第2の実施形態に係る受信装置が、送信装置と通信を行う受信装置に組み込まれることによって、図9に示す構成が得られる。
[3]他の実施形態に係る受信装置
なお、本実施形態に係る受信装置の構成は、図4に示す第1の実施形態に係る受信装置100(変形例に係る構成も含む。)や、図9に示す第2の実施形態に係る受信装置200(変形例に係る構成も含む。)に限られない。
なお、本実施形態に係る受信装置の構成は、図4に示す第1の実施形態に係る受信装置100(変形例に係る構成も含む。)や、図9に示す第2の実施形態に係る受信装置200(変形例に係る構成も含む。)に限られない。
[3−1]第3の実施形態に係る受信装置
例えば、本実施形態に係る受信装置は、図4に示す構成において、補正部128を、図9に示す補正部206に置き換えた構成をとってもよい。
例えば、本実施形態に係る受信装置は、図4に示す構成において、補正部128を、図9に示す補正部206に置き換えた構成をとってもよい。
上記の構成であっても、第3の実施形態に係る受信装置は、図4に示す第1の実施形態に係る受信装置100と同様に、本実施形態に係る時刻差算出方法に係る、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)を行うことが可能である。よって、第3の実施形態に係る受信装置は、図4に示す第1の実施形態に係る受信装置100と同様の効果を奏することができる。
また、上記の構成であっても、第3の実施形態に係る受信装置は、図9に示す第2の実施形態に係る受信装置200と同様に、本実施形態に係る時刻差算出方法に係る補正処理を行うことが可能である。よって、第3の実施形態に係る受信装置は、図9に示す第2の実施形態に係る受信装置200と同様に、カウンタ126におけるカウンタの値を直接的に変えることによって、受信装置における時計の時刻を補正することができる。
また、第3の実施形態に係る受信装置は、上述した第1の実施形態に係る受信装置と同様の変形例をとることが可能である。
[3−2]第4の実施形態に係る受信装置
また、本実施形態に係る受信装置は、例えば、図9に示す構成において、補正部206を、図4に示す補正部128に置き換えた構成をとってもよい。
また、本実施形態に係る受信装置は、例えば、図9に示す構成において、補正部206を、図4に示す補正部128に置き換えた構成をとってもよい。
上記の構成であっても、第4の実施形態に係る受信装置は、図9に示す第2の実施形態に係る受信装置200と同様に、本実施形態に係る時刻差算出方法に係る、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)を行うことが可能である。よって、第4の実施形態に係る受信装置は、図9に示す第2の実施形態に係る受信装置100と同様の効果を奏することができる。
また、上記の構成であっても、第4の実施形態に係る受信装置は、図4に示す第1の実施形態に係る受信装置100と同様に、本実施形態に係る時刻差算出方法に係る補正処理を行うことが可能である。よって、第4の実施形態に係る受信装置は、図4に示す第1の実施形態に係る受信装置100と同様に、カウンタ126におけるカウンタの値を間接的に変えることによって、受信装置における時計の時刻を補正することができる。
また、第4の実施形態に係る受信装置は、上述した第2の実施形態に係る受信装置と同様の変形例をとることが可能である。
[4]
以上のように、本実施形態に係る受信装置は、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”(オフセット)のノイズ除去処理を必要としないので、フィルタを用いた処理による制御遅れを防止することができる。また、本実施形態に係る受信装置は、上記ノイズ除去処理を必要としないので、例えば、往路の遅延時間(送信装置から受信装置に至る遅延時間)と復路の遅延時間(受信装置から送信装置に至る遅延時間)との最小値が等しいという条件のもとで、算出された時間差(オフセット)の誤差の発生を防止することができる。また、本実施形態に係る受信装置は、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”(オフセット)の算出に際して、遅延時間の最小値などの事前知識を必要としない。
以上のように、本実施形態に係る受信装置は、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”(オフセット)のノイズ除去処理を必要としないので、フィルタを用いた処理による制御遅れを防止することができる。また、本実施形態に係る受信装置は、上記ノイズ除去処理を必要としないので、例えば、往路の遅延時間(送信装置から受信装置に至る遅延時間)と復路の遅延時間(受信装置から送信装置に至る遅延時間)との最小値が等しいという条件のもとで、算出された時間差(オフセット)の誤差の発生を防止することができる。また、本実施形態に係る受信装置は、“送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差”(オフセット)の算出に際して、遅延時間の最小値などの事前知識を必要としない。
したがって、本実施形態に係る受信装置は、遅延時間の最小値などの事前知識を必要とせずに、時刻修正機能の高性能化を図ることができる。
以上、本実施形態として受信装置を挙げて説明したが、本実施形態は、かかる形態に限られない。本実施形態は、例えば、PC(Personal Computer)やサーバなどのコンピュータや、映像/音楽再生装置(または映像/音楽記録再生装置)、ゲーム機など、様々な電子機器に適用することができる。また、本実施形態は、例えば、上記のような電子機器に組み込むことが可能な、処理IC(Integrated Circuit)に適用することもできる。
また、本実施形態として受信装置と通信を行う対象として、送信装置を挙げて説明したが、本実施形態は、かかる形態に限られない。本実施形態は、例えば、PCやサーバなどのコンピュータや、映像/音楽再生装置(または映像/音楽記録再生装置)、ゲーム機など、様々な電子機器に適用することができる。
(本実施形態に係るプログラム)
コンピュータを、本実施形態に係る受信装置として機能させるためのプログラム(例えば、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)”、や、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理”など、本実施形態に係る時刻差算出方法に係る処理を実行することが可能なプログラム)が、コンピュータにおいて実行されることによって、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することができる。
コンピュータを、本実施形態に係る受信装置として機能させるためのプログラム(例えば、上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)”、や、“上記(1)の処理(第1遅延時間算出処理)〜上記(3)の処理(時刻差算出処理)、および上記補正処理”など、本実施形態に係る時刻差算出方法に係る処理を実行することが可能なプログラム)が、コンピュータにおいて実行されることによって、送信装置における時計の時刻と受信装置における時計の時刻との間の時刻差を算出することができる。
また、コンピュータを、本実施形態に係る受信装置として機能させるためのプログラムが、コンピュータにおいて実行されることによって、上述した第1の実施形態に係る受信装置〜第4の実施形態に係る受信装置が奏する効果を奏することができる。
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
例えば、上記では、コンピュータを、本実施形態に係る受信装置として機能させるためのプログラム(コンピュータプログラム)が提供されることを示したが、本実施形態は、さらに、上記プログラムを記憶させた記録媒体も併せて提供することができる。
上述した構成は、本実施形態の一例を示すものであり、当然に、本開示の技術的範囲に属するものである。
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出する第1遅延時間算出部と、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出する第2遅延時間算出部と、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出する時刻差算出部と、
を備え、
前記時刻差算出部は、フィルタを用いずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分を、論理演算により前記時間差として算出する、受信装置。
(2)
前記時刻差算出部は、
算出された第1遅延時間の最小値を保持し、保持される前記第1遅延時間の最小値を出力する第1最小値保持部と、
算出された第2遅延時間の最小値を保持し、保持される前記第2遅延時間の最小値を出力する第2最小値保持部と、
前記第1遅延時間の最小値と、前記第2遅延時間の最小値とに基づいて、前記時刻差を算出する算出部と、
を備える、(1)に記載の受信装置。
(3)
前記時刻差算出部は、
時間的に連続する、算出された第1遅延時間のサンプル間における時間差を算出する第1サンプル間時間差算出部と、
前記第1遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第1シフト値を算出する第1シフト値算出部と、
算出された前記第1遅延時間と、前記第1シフト値との差分値である第1差分値を算出する第1差分値算出部と、
時間的に連続する、算出された第2遅延時間のサンプル間における時間差を算出する第2サンプル間時間差算出部と、
前記第2遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第2シフト値を算出する第2シフト値算出部と、
算出された前記第2遅延時間と、前記第2シフト値との差分値である第2差分値を算出する第2差分値算出部と、
前記第1差分値と、前記第2差分値とに基づいて、前記時刻差を算出する算出部と、
を備える、(1)に記載の受信装置。
(4)
算出される時刻差に基づいて、前記受信装置における時計の時刻を補正する補正部をさらに備える、(1)〜(3)のいずれか1つに記載の受信装置。
(5)
前記補正部は、算出される前記時刻差に基づいて、カウンタにおけるカウンタの値を制御するクロック信号を調整することによって、前記受信装置における時計の時刻を補正する、(4)に記載の受信装置。
(6)
前記補正部は、算出される前記時刻差に基づいて、カウンタの値を書き換えることによって、前記受信装置における時計の時刻を補正する、(4)に記載の受信装置。
(7)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップと、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップと、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップと、
を有し、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、時刻差算出方法。
(8)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップ、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップ、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップ、
をコンピュータに実行させ、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、プログラム。
(1)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出する第1遅延時間算出部と、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出する第2遅延時間算出部と、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出する時刻差算出部と、
を備え、
前記時刻差算出部は、フィルタを用いずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分を、論理演算により前記時間差として算出する、受信装置。
(2)
前記時刻差算出部は、
算出された第1遅延時間の最小値を保持し、保持される前記第1遅延時間の最小値を出力する第1最小値保持部と、
算出された第2遅延時間の最小値を保持し、保持される前記第2遅延時間の最小値を出力する第2最小値保持部と、
前記第1遅延時間の最小値と、前記第2遅延時間の最小値とに基づいて、前記時刻差を算出する算出部と、
を備える、(1)に記載の受信装置。
(3)
前記時刻差算出部は、
時間的に連続する、算出された第1遅延時間のサンプル間における時間差を算出する第1サンプル間時間差算出部と、
前記第1遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第1シフト値を算出する第1シフト値算出部と、
算出された前記第1遅延時間と、前記第1シフト値との差分値である第1差分値を算出する第1差分値算出部と、
時間的に連続する、算出された第2遅延時間のサンプル間における時間差を算出する第2サンプル間時間差算出部と、
前記第2遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第2シフト値を算出する第2シフト値算出部と、
算出された前記第2遅延時間と、前記第2シフト値との差分値である第2差分値を算出する第2差分値算出部と、
前記第1差分値と、前記第2差分値とに基づいて、前記時刻差を算出する算出部と、
を備える、(1)に記載の受信装置。
(4)
算出される時刻差に基づいて、前記受信装置における時計の時刻を補正する補正部をさらに備える、(1)〜(3)のいずれか1つに記載の受信装置。
(5)
前記補正部は、算出される前記時刻差に基づいて、カウンタにおけるカウンタの値を制御するクロック信号を調整することによって、前記受信装置における時計の時刻を補正する、(4)に記載の受信装置。
(6)
前記補正部は、算出される前記時刻差に基づいて、カウンタの値を書き換えることによって、前記受信装置における時計の時刻を補正する、(4)に記載の受信装置。
(7)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップと、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップと、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップと、
を有し、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、時刻差算出方法。
(8)
送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップ、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップ、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップ、
をコンピュータに実行させ、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、プログラム。
10、100、200 受信装置
12、102 ネットワークインタフェース
14、104 同期制御パケット受信部
16、106 往路遅延時間計算部
18、108 周波数誤差計算部
20、110 周波数誤差判定部
22、32、112 ノイズ除去フィルタ
24、34、114、122 PID制御部
26、116 同期制御パケット送信部
28、118 復路遅延時間計算部
30、120、202 オフセット計算部
36、124クロック発生部
38、126 カウンタ
90 ネットワーク
150、152 最小値ホールド部
154、222 算出部
204 カウンタ値書換部
210 第1サンプル間時間差算出部
212 第1シフト値算出部
214 第1差分値算出部
216 第2サンプル間時間差算出部
218 第2シフト値算出部
220 第2差分値算出部
12、102 ネットワークインタフェース
14、104 同期制御パケット受信部
16、106 往路遅延時間計算部
18、108 周波数誤差計算部
20、110 周波数誤差判定部
22、32、112 ノイズ除去フィルタ
24、34、114、122 PID制御部
26、116 同期制御パケット送信部
28、118 復路遅延時間計算部
30、120、202 オフセット計算部
36、124クロック発生部
38、126 カウンタ
90 ネットワーク
150、152 最小値ホールド部
154、222 算出部
204 カウンタ値書換部
210 第1サンプル間時間差算出部
212 第1シフト値算出部
214 第1差分値算出部
216 第2サンプル間時間差算出部
218 第2シフト値算出部
220 第2差分値算出部
Claims (8)
- 送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出する第1遅延時間算出部と、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出する第2遅延時間算出部と、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出する時刻差算出部と、
を備え、
前記時刻差算出部は、フィルタを用いずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分を、論理演算により前記時間差として算出する、受信装置。 - 前記時刻差算出部は、
算出された第1遅延時間の最小値を保持し、保持される前記第1遅延時間の最小値を出力する第1最小値保持部と、
算出された第2遅延時間の最小値を保持し、保持される前記第2遅延時間の最小値を出力する第2最小値保持部と、
前記第1遅延時間の最小値と、前記第2遅延時間の最小値とに基づいて、前記時刻差を算出する算出部と、
を備える、請求項1に記載の受信装置。 - 前記時刻差算出部は、
時間的に連続する、算出された第1遅延時間のサンプル間における時間差を算出する第1サンプル間時間差算出部と、
前記第1遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第1シフト値を算出する第1シフト値算出部と、
算出された前記第1遅延時間と、前記第1シフト値との差分値である第1差分値を算出する第1差分値算出部と、
時間的に連続する、算出された第2遅延時間のサンプル間における時間差を算出する第2サンプル間時間差算出部と、
前記第2遅延時間のサンプル間における時間差を累積し、累積された累積値が所定値分シフトされた第2シフト値を算出する第2シフト値算出部と、
算出された前記第2遅延時間と、前記第2シフト値との差分値である第2差分値を算出する第2差分値算出部と、
前記第1差分値と、前記第2差分値とに基づいて、前記時刻差を算出する算出部と、
を備える、請求項1に記載の受信装置。 - 算出される時刻差に基づいて、前記受信装置における時計の時刻を補正する補正部をさらに備える、請求項1に記載の受信装置。
- 前記補正部は、算出される前記時刻差に基づいて、カウンタにおけるカウンタの値を制御するクロック信号を調整することによって、前記受信装置における時計の時刻を補正する、請求項4に記載の受信装置。
- 前記補正部は、算出される前記時刻差に基づいて、カウンタの値を書き換えることによって、前記受信装置における時計の時刻を補正する、請求項4に記載の受信装置。
- 送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップと、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップと、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップと、
を有し、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、時刻差算出方法。 - 送信装置が送信信号を送信した時刻を示す第1時刻情報と、前記送信信号が受信装置において受信された時刻を示す第2時刻情報とに基づいて、前記送信信号が前記受信装置において受信されるまでの時間差を示す第1遅延時間を算出するステップ、
前記受信装置が前記送信信号に対応する応答信号を送信した時刻を示す第3時刻情報と、前記応答信号が前記送信装置において受信された時刻を示す第4時刻情報とに基づいて、前記応答信号が前記送信装置において受信されるまでの時間差を示す第2遅延時間を算出するステップ、
算出された前記第1遅延時間と前記第2遅延時間とに基づいて、前記送信装置における時計の時刻と前記受信装置における時計の時刻との間の時刻差を算出するステップ、
をコンピュータに実行させ、
前記時刻差を算出するステップでは、フィルタが用いられずに、前記第1遅延時間と前記第2遅延時間とにおける固定遅延成分が、論理演算により前記時間差として算出される、プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013121589A JP2014238357A (ja) | 2013-06-10 | 2013-06-10 | 受信装置、時刻差算出方法、およびプログラム |
| US14/286,027 US9167545B2 (en) | 2013-06-10 | 2014-05-23 | Receiver, method of calculating time difference, and program |
| CN201410242872.9A CN104243129B (zh) | 2013-06-10 | 2014-06-03 | 接收器、计算时间差的方法以及计算机可读存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013121589A JP2014238357A (ja) | 2013-06-10 | 2013-06-10 | 受信装置、時刻差算出方法、およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014238357A true JP2014238357A (ja) | 2014-12-18 |
Family
ID=52005478
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013121589A Pending JP2014238357A (ja) | 2013-06-10 | 2013-06-10 | 受信装置、時刻差算出方法、およびプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9167545B2 (ja) |
| JP (1) | JP2014238357A (ja) |
| CN (1) | CN104243129B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018046390A (ja) * | 2016-09-14 | 2018-03-22 | 富士電機株式会社 | 処理装置、システム、処理方法および処理プログラム |
| JP2020184710A (ja) * | 2019-05-09 | 2020-11-12 | 株式会社日立製作所 | 通信制御装置および通信制御方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016103227A1 (en) * | 2014-12-24 | 2016-06-30 | Abb Technology Ltd. | A method for time synchronization of devices in a control network |
| JP2017044599A (ja) * | 2015-08-27 | 2017-03-02 | ルネサスエレクトロニクス株式会社 | 制御システム |
| US11962403B2 (en) | 2019-04-01 | 2024-04-16 | Cisco Technology, Inc. | Method and apparatus for network time syncing |
| CN110300450B (zh) * | 2019-05-22 | 2021-03-19 | 南京大学 | 一种利用自适应滤波器校正ieee 1588协议的时钟伺服方法 |
| CN110247723B (zh) * | 2019-06-18 | 2021-01-15 | 广东大普通信技术有限公司 | 一种ptp时钟网络中噪声识别和参数调整的装置及方法 |
| CN110362717B (zh) * | 2019-07-01 | 2021-09-10 | 泰华智慧产业集团股份有限公司 | 基于多设备时间差可变的目标追踪方法及系统 |
| CN110806291B (zh) * | 2019-11-25 | 2021-06-08 | 杭州绿洁环境科技股份有限公司 | 一种管网噪声记录仪的网络时间同步方法 |
| CN112019291B (zh) * | 2020-08-31 | 2022-12-27 | 合肥中科君达视界技术股份有限公司 | 一种网络设备校时方法 |
| CN114489237A (zh) * | 2021-12-24 | 2022-05-13 | 北京万集科技股份有限公司 | 时间同步方法、控制系统及计算机可读存储介质 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6681099B1 (en) * | 2000-05-15 | 2004-01-20 | Nokia Networks Oy | Method to calculate true round trip propagation delay and user equipment location in WCDMA/UTRAN |
| US7072432B2 (en) * | 2002-07-05 | 2006-07-04 | Meshnetworks, Inc. | System and method for correcting the clock drift and maintaining the synchronization of low quality clocks in wireless networks |
| US7415044B2 (en) * | 2003-08-22 | 2008-08-19 | Telefonaktiebolaget Lm Ericsson (Publ) | Remote synchronization in packet-switched networks |
| US7239626B2 (en) * | 2004-06-30 | 2007-07-03 | Sharp Laboratories Of America, Inc. | System clock synchronization in an ad hoc and infrastructure wireless networks |
| KR101197280B1 (ko) * | 2005-07-15 | 2012-11-05 | 삼성전자주식회사 | 타임 스탬프를 이용한 타임 동기 방법 및 장치 |
| US7602873B2 (en) * | 2005-12-23 | 2009-10-13 | Agilent Technologies, Inc. | Correcting time synchronization inaccuracy caused by asymmetric delay on a communication link |
| WO2008144842A1 (en) * | 2007-05-31 | 2008-12-04 | Avega Systems Pty Ltd | Systems and methods for synchronization in a networked environment |
| KR20090032306A (ko) * | 2007-09-27 | 2009-04-01 | 한국전자통신연구원 | 네트워크상의 타임 동기화 시스템 및 방법 |
| TW200935858A (en) * | 2007-10-23 | 2009-08-16 | Agency Science Tech & Res | Communication device and method for synchronisation |
| US8089989B2 (en) * | 2007-11-29 | 2012-01-03 | Samsung Electronics Co., Ltd. | Synchronization of nodes on a network |
| CA2717591C (en) * | 2008-02-19 | 2016-11-08 | Elbit Systems Of America, Llc | Mimo slotted aloha (msa) system |
| JP5369814B2 (ja) | 2009-03-26 | 2013-12-18 | ソニー株式会社 | 受信装置および受信装置の時刻修正方法 |
| KR101242419B1 (ko) * | 2009-07-20 | 2013-03-12 | 한국전자통신연구원 | 병렬처리 기반의 시각 동기화 장치 |
| WO2011025746A1 (en) * | 2009-08-25 | 2011-03-03 | Semtech Corporation | Measurement and adjustment of real-time values according to residence time in networking equipment without access to real time |
| TWI411277B (zh) * | 2009-12-23 | 2013-10-01 | Ind Tech Res Inst | 網路從節點與網路系統精確時間同步之方法 |
| CN102111258A (zh) * | 2009-12-25 | 2011-06-29 | 华为技术有限公司 | 时钟同步方法、设备和系统 |
| US8135866B2 (en) * | 2010-01-22 | 2012-03-13 | Research In Motion Limited | System and method for detecting and processing stale messages |
| EP2544387B1 (en) * | 2011-07-04 | 2016-03-16 | Mitsubishi Electric R&D Centre Europe B.V. | Methods and devices for performing synchronization and compensating clock drift among communication devices |
| US8806063B1 (en) * | 2011-07-11 | 2014-08-12 | Juniper Networks, Inc. | Enhanced pulse assisted time synchronization protocol |
-
2013
- 2013-06-10 JP JP2013121589A patent/JP2014238357A/ja active Pending
-
2014
- 2014-05-23 US US14/286,027 patent/US9167545B2/en active Active
- 2014-06-03 CN CN201410242872.9A patent/CN104243129B/zh not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018046390A (ja) * | 2016-09-14 | 2018-03-22 | 富士電機株式会社 | 処理装置、システム、処理方法および処理プログラム |
| JP2020184710A (ja) * | 2019-05-09 | 2020-11-12 | 株式会社日立製作所 | 通信制御装置および通信制御方法 |
| WO2020225954A1 (ja) * | 2019-05-09 | 2020-11-12 | 株式会社日立製作所 | 通信制御装置および通信制御方法 |
| JP7116706B2 (ja) | 2019-05-09 | 2022-08-10 | 株式会社日立製作所 | 通信制御装置および通信制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140362960A1 (en) | 2014-12-11 |
| CN104243129B (zh) | 2019-04-16 |
| CN104243129A (zh) | 2014-12-24 |
| US9167545B2 (en) | 2015-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014238357A (ja) | 受信装置、時刻差算出方法、およびプログラム | |
| JP5321923B2 (ja) | クロック同期システム、ノード、クロック同期方法及びプログラム | |
| US11606155B2 (en) | Method for exchanging time synchronization packet and network apparatus | |
| JP5440880B2 (ja) | パケットフィルタを用いたクロック同期システム、装置、方法およびそのプログラム | |
| CN107710650B (zh) | 用于在时变和有损网络上的时钟同步的方法、系统和装置 | |
| US7440474B1 (en) | Method and apparatus for synchronizing clocks on packet-switched networks | |
| CN108023723B (zh) | 频率同步的方法以及从时钟 | |
| KR20050025582A (ko) | 무선 네트워크에서 클록 드리프트의 정정 및 동기의유지를 위한 시스템 및 방법 | |
| CN101729180A (zh) | 精准时钟同步方法及系统、精准时钟频率/时间同步装置 | |
| KR20150143801A (ko) | 타임스탬프를 생성하는 방법, 장치, 그리고 시스템 | |
| WO2001050674A1 (en) | Synchronization in packet-switched telecommunications system | |
| US20130215910A1 (en) | Transmission apparatus, transmission method, program, and communication system | |
| US20140241381A1 (en) | Time control device, time control method, and program | |
| WO2013051447A1 (ja) | 時刻制御装置、時刻制御方法、およびプログラム | |
| JP2014027437A (ja) | 通信装置、通信システム、および同期処理方法、並びにプログラム | |
| JP2017069669A (ja) | 時刻同期装置、基地局装置、及び、時刻同期方法 | |
| WO2013163793A1 (en) | Automatic time and frequency synchronization over an asynchronous network | |
| CN107800529B (zh) | 一种网络节点的时钟频率同步方法 | |
| WO2024168940A1 (en) | Method of high precision time synchronization with a communication network grandmaster for user plane function | |
| CN103857029A (zh) | 一种确定上行链路和下行链路的延时差的方法、装置和设备 | |
| US9442511B2 (en) | Method and a device for maintaining a synchronized local timer using a periodic signal | |
| CN114520703B (zh) | 用于工业网络设备间时间同步的时钟漂移补偿方法及电路 | |
| CN111525975A (zh) | 一种时钟同步方法、接收器、发送器和系统 | |
| CN115208505A (zh) | 时间同步方法及时间同步装置 | |
| JP2007306497A (ja) | パケット伝送におけるクロック同期方法及び回路 |