JP2014508247A - 偏揺れ又は他のパラメータの制御を含む風力タービンを制御するためのシステム及び方法 - Google Patents
偏揺れ又は他のパラメータの制御を含む風力タービンを制御するためのシステム及び方法 Download PDFInfo
- Publication number
- JP2014508247A JP2014508247A JP2013553620A JP2013553620A JP2014508247A JP 2014508247 A JP2014508247 A JP 2014508247A JP 2013553620 A JP2013553620 A JP 2013553620A JP 2013553620 A JP2013553620 A JP 2013553620A JP 2014508247 A JP2014508247 A JP 2014508247A
- Authority
- JP
- Japan
- Prior art keywords
- turbine
- wind
- parameters
- external
- operating parameters
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 24
- 238000005259 measurement Methods 0.000 claims abstract description 22
- 238000004519 manufacturing process Methods 0.000 claims abstract description 17
- 238000003745 diagnosis Methods 0.000 claims abstract description 5
- 230000008901 benefit Effects 0.000 claims description 21
- 238000005070 sampling Methods 0.000 claims description 17
- 238000004458 analytical method Methods 0.000 claims description 11
- 238000009826 distribution Methods 0.000 claims description 8
- 238000012544 monitoring process Methods 0.000 claims description 8
- 230000007613 environmental effect Effects 0.000 claims description 5
- 230000006872 improvement Effects 0.000 claims description 5
- 238000012423 maintenance Methods 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 10
- 238000012360 testing method Methods 0.000 description 10
- 241001071864 Lethrinus laticaudis Species 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 230000001276 controlling effect Effects 0.000 description 6
- 230000010354 integration Effects 0.000 description 5
- 230000005611 electricity Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- RLQJEEJISHYWON-UHFFFAOYSA-N flonicamid Chemical compound FC(F)(F)C1=CC=NC=C1C(=O)NCC#N RLQJEEJISHYWON-UHFFFAOYSA-N 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- IRPVABHDSJVBNZ-RTHVDDQRSA-N 5-[1-(cyclopropylmethyl)-5-[(1R,5S)-3-(oxetan-3-yl)-3-azabicyclo[3.1.0]hexan-6-yl]pyrazol-3-yl]-3-(trifluoromethyl)pyridin-2-amine Chemical compound C1=C(C(F)(F)F)C(N)=NC=C1C1=NN(CC2CC2)C(C2[C@@H]3CN(C[C@@H]32)C2COC2)=C1 IRPVABHDSJVBNZ-RTHVDDQRSA-N 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000005381 potential energy Methods 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/0204—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor for orientation in relation to wind direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
- F03D7/043—Automatic control; Regulation by means of an electrical or electronic controller characterised by the type of control logic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/82—Forecasts
- F05B2260/821—Parameter estimation or prediction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/10—Purpose of the control system
- F05B2270/20—Purpose of the control system to optimise the performance of a machine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/329—Azimuth or yaw angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/335—Output power or torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Wind Motors (AREA)
Abstract
偏揺れ及び他のパラメータの制御など、風力タービンを制御するためのシステム及び方法が提供される。一実施形態によると、風力タービンの幾つかの基本動作パラメータの各々を測定し、タービンの現行パラメータ及びタービン動作極限値などのタービン動作パラメータを提供することができる。制御装置自体の重要動作パラメータも監視される。外部/周囲測定機器又はセンサを用いて、外部/周囲の風データ又は他の外部パラメータなどの環境全体に関する測定値を提供することができる。タービン動作パラメータは、制御装置論理により、実測エネルギー生産量を計算するのに用いられる。外部/周囲測定値は、制御装置論理により、推定エネルギー生産量を計算するのに用いられる。これらの指標の比較を用いて、診断及び/又は効率などの有用なフィードバックを与え、及び/又は、風力タービンにおける偏揺れ又は他のパラメータを制御することができる。
【選択図】図1
【選択図】図1
Description
本発明の実施形態は、一般に、再生可能エネルギーシステム及風力タービンに関し、具体的には、風力タービンとともに使用するための制御装置、並びに風力タービンにおける偏揺れ又は他のパラメータを制御するためのシステム及び方法に関する。
本出願は、2011年2月11日出願の「CONTROLLER FOR USE WITH A WIND TURBINE」と題する米国特許仮出願第61/442,135号、及び2011年2月11日出願の「SYSTEM AND METHOD FOR CONTROLLING YAW OR OTHER PARAMETERS IN A WIND TURBINE」と題する米国特許仮出願第61/442,136号の優先権の利益を主張するものであり、これら出願の各々は引用により本明細書に組み入れられる。
著作権表示
本特許書類の開示の一部分は、著作権保護の対象である材料を含む。著作権の所有者は、特許商標局の特許ファイル又は記録に現れる通りの本特許書類又は特許開示の何人による複製にも異議はないが、それ以外についは全ての著作権の権利を留保する。
本出願は、2011年2月11日出願の「CONTROLLER FOR USE WITH A WIND TURBINE」と題する米国特許仮出願第61/442,135号、及び2011年2月11日出願の「SYSTEM AND METHOD FOR CONTROLLING YAW OR OTHER PARAMETERS IN A WIND TURBINE」と題する米国特許仮出願第61/442,136号の優先権の利益を主張するものであり、これら出願の各々は引用により本明細書に組み入れられる。
著作権表示
本特許書類の開示の一部分は、著作権保護の対象である材料を含む。著作権の所有者は、特許商標局の特許ファイル又は記録に現れる通りの本特許書類又は特許開示の何人による複製にも異議はないが、それ以外についは全ての著作権の権利を留保する。
風力発電とは、風力タービンを用いて、電力又は電気等の使用可能ネルギーへの風の変換のことを言う。一般に、風力タービンは、ロータに取付けられた複数のブレードを含み、このロータが発電機に取付けられる。入射風によってブレード(及びロータ)が回転すると、電力が発生する。
多くの異なる設計が存在するが、タービンは、ロータが水平に取付けられた水平軸風力タービン(HAWT)と、ロータが垂直に取付けられた垂直軸風力タービン(VAWT)とに分類される。より大型のタービン及び場合により数百のタービンを含むことがある「ウィンドファーム」を幹線送電網に接続して、その出力を用いて大きな地域社会に電力供給することができ、一方、小さな風力タービンは、遠く離れた町や農場などの遠隔地に地域電力を供給するのに特に適している。多種多様な風力タービン設計について、タービンによる利用可能な風の使用をさらに最適化させて出力を向上させることができる技術が、風力の全体的な採用を促進し、より清浄な環境に寄与することができる。
通常、タービンは、特定の風条件下でタービンをどのように動作させるべきかを制御する制御装置を用いて動作させる。例えば、水平軸風力タービンにおいて、制御装置は、現在の風向に関する情報を用いてタービンブレードを風に向かって回転若しくは偏揺れさせることができ、又は、現在の風速に関する情報を用いて、タービンブレードの角度を調整することにより、低い風速においてより良く動作させ、若しくはより高い風速における損傷の可能性を減らすことができる。
多くの制御装置、特に小さいタービンの制御装置は、本質的に機械的であり、タービン自体からの現在の情報を用いて、入射風に向かってタービンブレードを回転させるなど、タービン及びブレードの動作を制御する。しかし、より洗練された制御装置であれば、新規及び既存のタービン設計の両方を、より効率的に動作させることが可能であり、より洗練された制御技術を可能にすることができる。これが本発明の実施形態が取り組もうとする一般的分野である。
本明細書は、風力タービンと共に用いる制御装置を開示する。一実施形態によると、タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含む、タービン動作パラメータを与えることができる。制御装置自体の重要な動作パラメータも監視される。外部/周囲測定機器又はセンサを用いて、外部/周囲の風データ又は他の外部データなどの環境全体に関する測定値を与えることができる。タービン動作パラメータは、制御装置論理により、実測エネルギー生産量、即ち、タービンの現在のエネルギー出力の指標を計算するのに使用される。外部/周囲測定値は、制御装置論理により、推定エネルギー生産量、即ち、現在の環境条件下で、タービンがどれほどのエネルギー出力を生成するべきかの指標を計算するのに使用される。これらの指標を比較することにより、診断及び/又は効率などの有用なフィードバックが得られる。一実施形態によると、制御装置は、この情報を用いて、自動的にタービンを調整又は制御することもできる。一実施形態によると、制御装置は、組込み型サーバを含むことができ、組込み型サーバは、ローカルエリアネットワーク又はインターネット上のアクセスを可能にし、全てのタービンの動作パラメータ及び情報にアクセスすることを可能にし、その情報を、遠隔監視、保守及びサポートのサービスを提供する他の集中型サーバに供給する。1つ又はそれ以上のタービンからの情報を、ウェブページなどのユーザインタフェースを介して提供することができる。
本明細書は、風力タービンにおける偏揺れ又は他のパラメータを制御するためのシステム及び方法も開示する。一実施形態によると、タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含む、タービンの動作パラメータを与えることができ、他方、外部/周囲測定機器又はセンサを用いて、外部/周囲の風データ又は他の外部データなどの環境全体に関する外部/周囲の測定値を与えることができる。この情報を用いて風力タービンにおける偏揺れ又は他のパラメータをより効率的な様式で制御することができる。一実施形態によると、制御装置は、あるサンプリング期間における風速分布を監視し、次いで費用/便益分析を行って偏揺れ調整を行うかどうかを判断する。
前述のように、通常、タービンは、特定の風条件下でタービンをどのように動作させるかを制御する制御装置を用いて動作させる。多くの制御装置は、本質的に大部分機械的であり、タービン自体からの情報を用いて、入射風に向かってタービンブレードを回転又は偏揺れさせるなど、タービン及びブレードの動作を制御する。しかし、より洗練された制御装置であれば、新規及び既存のタービン設計の両方を、より効率的に動作させることが可能であり、より洗練された又は有用な制御技術を可能にすることができる。この問題を克服するために、本明細書において、風力タービンと共に使用するための制御装置の種々の実施形態を説明する。さらに、本明細書において、種々の実施形態による、風力タービンにおける偏揺れ又は他のパラメータを制御するためのシステム及び方法を説明する。
風力タービン環境
図1は、一実施形態による、スマート制御装置を含む風力タービン環境の図を示す。図1に示すように、風力タービン環境100は、1つ又はそれ以上のタービン102を含み、タービン102のそれぞれがスマート制御装置104を含むか又はそれに関係付けられる。一実施形態によると、各タービンは、それ専用のスマート制御装置を含むが、他の実施形態によると、1つの制御装置を用いて複数のタービンを制御することができる。
図1は、一実施形態による、スマート制御装置を含む風力タービン環境の図を示す。図1に示すように、風力タービン環境100は、1つ又はそれ以上のタービン102を含み、タービン102のそれぞれがスマート制御装置104を含むか又はそれに関係付けられる。一実施形態によると、各タービンは、それ専用のスマート制御装置を含むが、他の実施形態によると、1つの制御装置を用いて複数のタービンを制御することができる。
動作中、タービンは、利用可能な風106を電気等の使用可能エネルギーに変換する。図1にさらに示すように、風力タービン環境は、利用可能な風、及び、タービン自体とは別個に、他の条件に関する現在の情報を捕捉する1つ又はそれ以上の外部/周囲測定機器又はセンサを含む。一実施形態によると、かかる外部/周囲測定機器又はセンサは、例えば、風速計、風向計、及び他の環境測定機器を含むことができる。
一実施形態によると、タービンの幾つかの基本動作パラメータの各々を測定して、タービン動作パラメータ110を与えることができる。この動作パラメータには、タービンの現行パラメータ112(例えば、現在測定された、交流発電機の3相の各々の入力電圧値及び電流値、交流発電機の交流周波数、直流リンク電圧値及び電流値、各々のインバータへの電流値、又は他の現在測定されたパラメータ)、及びタービン動作極限値114(例えば、交流発電機周波数の最大測定値、最大直流リンク電圧値、最大直流電流値、又は他の測定された最小値又は最大値)の両方を含めることができる。一実施形態によると、制御装置自体の重要な動作パラメータも監視される。
一実施形態によると、外部/周囲測定機器又はセンサを用いて、例えば、外部/周囲の風データ118又は他の外部データ120などの、環境全体に関する外部/周囲測定値116を与えることができる。これを遂行するため、一実施形態によると、制御装置に、例えば、外部風速計、風向計又は他の機器若しくはセンサのための入力部を含めて、制御装置が情報を受取るようにすることができる。
タービン動作パラメータは、制御装置論理130により、エネルギー生産量測定値124、即ち、タービンの現在のエネルギー出力の指標を計算するのに使用される。外部/周囲測定値は、制御装置論理により、推定エネルギー生産量126、即ち、現在の環境条件下で、タービンがどれほどのエネルギー出力を生成する必要があるかの指標を計算するのに使用される。これらの指標を比較することにより、顧客のエネルギー生産量に関する質問、例えば「今月は1000kWhしか生産しなかったので、自分のシステムには何か悪いところがあるように思われる。誰か派遣してもらえないか?」という質問に答える手段など、有用なフィードバックが与えられる。一実施形態によると、かかる診断情報146及び/又は効率情報148は、制御装置のサーバ/インタフェース132を介して、ユーザ/顧客144(エンドユーザ又は中央監視サービスとすることができる)に提供することができる。一実施形態によると、制御装置は、これら情報を用いて、タービン制御インタフェース131を介して自動的にタービン140を調整又は制御することができる。
風力タービンと共に使用するための制御装置
図2は、一実施形態による風力タービン制御装置の図150を示す。前述のように、一実施形態によると、タービンの診断及び/又は効率情報は、制御装置のサーバ/インタフェースを介して、ユーザ/顧客(エンドユーザ又は中央監視サービスとすることができる)に提供することができる。一実施形態によると、制御装置のサーバ/インタフェースは、組込み型サーバ(例えば、ウェブサーバ)152を含むか、又は、例えば無線技術、WiFi又はGSM(登録商標)を用いて、ローカルエリアネットワーク又はインターネットへのアクセスを可能にする他のアプリケーションソフトウェアを含むことができる。サーバは、タービンの動作パラメータ及び情報154の全てにアクセスし、その情報を、遠隔監視、保守及びサポートサービスを提供する他の集中型サーバに供給することができる。一実施形態によると、幾つかの監視されたタービン162、164の各々に関する診断情報146、147及び効率情報148,149などの情報を含む、1つ又はそれ以上のタービンからの情報は、ユーザインタフェース160、例えばウェブページを介して提供することができる。
図2は、一実施形態による風力タービン制御装置の図150を示す。前述のように、一実施形態によると、タービンの診断及び/又は効率情報は、制御装置のサーバ/インタフェースを介して、ユーザ/顧客(エンドユーザ又は中央監視サービスとすることができる)に提供することができる。一実施形態によると、制御装置のサーバ/インタフェースは、組込み型サーバ(例えば、ウェブサーバ)152を含むか、又は、例えば無線技術、WiFi又はGSM(登録商標)を用いて、ローカルエリアネットワーク又はインターネットへのアクセスを可能にする他のアプリケーションソフトウェアを含むことができる。サーバは、タービンの動作パラメータ及び情報154の全てにアクセスし、その情報を、遠隔監視、保守及びサポートサービスを提供する他の集中型サーバに供給することができる。一実施形態によると、幾つかの監視されたタービン162、164の各々に関する診断情報146、147及び効率情報148,149などの情報を含む、1つ又はそれ以上のタービンからの情報は、ユーザインタフェース160、例えばウェブページを介して提供することができる。
一実施形態によると、制御装置論理及びタービン制御インタフェースを、タービンの動作パラメータ及び情報と組み合せて用いることにより、例えば、タービンが発電を開始するたびに、重要及び/又は安全に関連したシステム構成要素を試験し、それらの試験の結果を報告することができる。例えば、一実施形態によると、塔上制動抵抗器が正常に機能しているかどうか、及び、負荷分岐が接続され適切に機能しているかを判断する一連の試験を実行することができる。これらの試験は、タービンが回転し始め、直流バス電圧が90ボルトを越えると、2−3秒のうちに行うことができる。(これは、本来、安全システムとして機能することを意図したものではなく、既存/多重の安全システムが意図した通りに機能することを検証するためのものであることに留意されたい)。一実施形態によると、制御装置は、塔上制動抵抗器を短時間接続し、適切な機能を示す予測挙動パターン及び交流発電機の3相の間のバランスを監視する。制御装置は、負荷分岐抵抗器について類似の試験を行って、適切に機能することを保証する。一実施形態によると、制動試験の重要な特徴は、タービンが減速する間に電気信号を測定することにより制動抵抗器が適切に機能しているかを評価することである。かかる試験期間中、タービンの速度は風の変化(これは試験期間を100msの長さにすることによって対処することができる)により、又はブレーキの機能により変化する場合がある。後者の側面は、交流発電機出力の測定された振幅をAC周波数に正規化することによって克服することができる。無負荷の交流発電機の電圧は、速度/周波数の関数であるので、交流発電機の電圧/周波数の比は、制動抵抗器で与えられる負荷によって低下する。制動器がオフであるときとオンであるときの比の変化を測定することにより、システムを速度の変化に適応させることができる。
上記の試験は、塔上制動抵抗器が適切に機能しているかどうかの判断を表すものであるが、種々の実施形態によると、他の形式の試験を行って、付加的な情報を提供することができることが明白である。
図3は、一実施形態による、風力タービンと共に制御装置を使用するための方法のフローチャートを示す。図3に示すように、ステップ170において、制御装置は、タービンの動作パラメータ(例えば、交流発動機の相への入力電圧及び電流)、動作極限値(例えば、交流発動機最大周波数)、及び,制御装置自体の重要な動作パラメータを測定する。ステップ172において、制御装置は、タービンから独立して風資源を測定するセンサから外部/周囲測定値及び情報を受け取る(例えば、風速計、風向計に対する入力を用いて)。ステップ174において、制御装置は、随意的に試験パターンを実行し、及び/又はタービン挙動の予測されたパターンを監視する。ステップ176において、制御装置は、例えば、タービンの健全性、診断及び効率に関する情報をユーザ/顧客に提供する。
風力タービンにおける偏揺れ又は他のパタメータの制御
前述の様に、一実施形態によると、タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することができ、一方、外部/周囲測定機器又はセンサを用いて、外部/周囲の風データ又は他の外部データなど、環境全体に関する外部/周囲測定値を提供することができる。
前述の様に、一実施形態によると、タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することができ、一方、外部/周囲測定機器又はセンサを用いて、外部/周囲の風データ又は他の外部データなど、環境全体に関する外部/周囲測定値を提供することができる。
一実施形態によると、この情報は、風力タービンの偏揺れ又は他のパラメータをより効率的な様式で制御するのに用いることができる。特に、大型の風力タービンの場合、タービンは、風に対してブレードを自動的に回転又は偏揺れさせないが、その理由は、自動的に回転又は偏揺れさせるには時間がかかり、最適でない可能性が高く、また、急速に/頻繁に行いすぎるとタービンを損傷するおそれがあるからである。その代わり、タービンの偏揺れの調整は、決定論的つまり制御されたステップであり、それ自体、実施するには多少の偏揺れ電力/費用がかかる。従って、電力出力を向上させる合理的な見込みがない限り、偏揺れ調整を行うことが有益ではない場合がある。これに対処するために、一実施形態によると、偏揺れ調整は、運動のエネルギー費用が、結果として見込まれるエネルギー便益の一部分である等、十分小さく、所望の効率目標が達成される場合にのみ行われる。
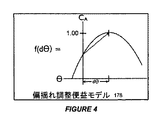
一実施形態によると、制御装置は、あるサンプリング期間における風速を監視し、費用/便益分析を行って偏揺れ調整を行うかどうか判断する。図4は、一実施形態による、偏揺れ調整便益モデル178の図を示す。かかるモデル、曲線又は同等のデータは、制御装置が調整による相対的な改善、つまり「この偏揺れ/運動でどれほどの改善を期待できるか」を判断することを可能にする。これは、以下の式で表すことができる。
Cost Model=|dΘ|・Kyaw
Expected Benefit=f(dΘ)・Future Production
ここで、Kyawは特定のタービンの係数であり、Cost Modelは、特定のタービンをΘ度偏揺れさせるのに必要な合計費用である。
Cost Model=|dΘ|・Kyaw
Expected Benefit=f(dΘ)・Future Production
ここで、Kyawは特定のタービンの係数であり、Cost Modelは、特定のタービンをΘ度偏揺れさせるのに必要な合計費用である。
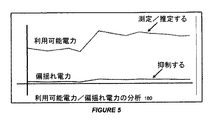
図5は、一実施形態による、使用可能電力/偏揺れ費用電力分析180の例を示す。偏揺れ調整の場合、システムの効率目標又はターゲットを達成するために、偏揺れ消費電力つまり偏揺れ費用は、見込みエネルギー生産量のある所望の小さなパーセンテージより小さくする必要がある。システムが、かかる電力出力の改善の合理的な見込みがないと判断する場合は、偏揺れ調整を行うことが有益ではないことがある。
図6は、一実施形態による、風速分布ヒストグラムつまりチャート182の図を示す。一実施形態によると、システムは、測定風速分布を積分し、タービンのカットインに必要な速度以下が切り捨て、この分析結果を用いて、非生産的偏揺れ調整のリスクを制御する。
一実施形態によると、システムは、予測便益のいくつかの小さな部分を偏揺れエネルギークレジットの「貯金箱」として積分することができる。システムは、貯金箱のクレジット内容が運動費用を超えるときにのみ偏揺れを調整する。そこで、各運動の費用が貯金箱から差し引かれる。偏揺れさせるためのエネルギー消費は、利用可能な風資源及び効率目標によって制限される。時間とともに、システムは、環境全体に対して最適に偏揺れを制御する。
図7は、一実施形態による、偏揺れ又は他のパラメータの制御を可能にする風力タービン環境185の図を示す。図7に示すように、一実施形態によると、制御装置は、風速及び風向を連続的に測定する。風速及び風向は、共に、フィルタ処理して帯域幅を約1Hzに減らす。フィルタ処理された値は、以下でさらに説明するように、制御装置により、タービン制御/費用便益アルゴリズム又は類似プロセス186の入力として用いられる。
一実施形態によると、このアルゴリズムは、反復離散サンプリング期間188(例えば、3乃至5分)にわたって動作する。システムは、ある特定のサンプリング頻度(例えば、1秒毎に1回)190で風速をサンプリングし、風速ヒストグラムつまりチャート178を追加して風速分布を特徴付ける。一実施形態によると、システムは、さらに風向値をフィルタ処理して、ヒストグラムのサンプリング期間に対する平均値を提示する。サンプリング期間の最後に、風速ヒストグラムが積分され、タービンのカットイン速度以下を切り捨てられる。積分結果を正規化して、測定風速の範囲にわたり0乃至1の確率範囲に広がるようにする。この積分結果は、風資源の確率的推定を表す。次に、システムは、積分結果を調べて、もしより大きな風資源があれば、その特定の信頼度(まだ選択されていないが65−75%の見込み)がある風速をみつける。この蓋然的速度が将来の予測資源となる。
一実施形態によると、システムは、現在の偏揺れ角度を、サンプリング期間にわたって平均された風向角度から減ずることによって、目標運動の費用を計算192することができる。次に、システムは、「便益」因子を、1引く運動角度の余弦として計算する。便益関数は、90度より大きい角度に対してゼロで切り捨てられる。「クレジット」は、蓋然的速度に対する予測タービン電力に、1引く所望システム効率(及び、おそらく他のシステム損失に関する別の因子)及び便益因子を乗ずることによって、蓋然的速度から計算される。このクレジットは、蓋然的速度がゼロであればゼロとなる。一実施形態によると、クレジットは、クレジットの「貯金箱」196に加えられる。次にシステムは、定数(未決定で、偏揺れを運動させるための機構が必要とする電力に基づく)に目標運動角度の絶対値を乗ずることによって目標運動の「費用」を計算する。貯金箱が目標運動の費用より大きい場合は、運動が開始され費用が貯金箱から差し引かれる194。運動が既に開始されている場合は、運動が完了するまで分析は一時的に中断される。次に、システムはサンプリング及び利用可能な貯金したクレジットに対して費用の定期的見積りの生成を続ける。
上記の費用便益アルゴリズムは、種々の実施形態により、風速及び風向を測定し、偏揺れの調整に関するかどうかの判断を行うことを記述するが、例えば、いつブレード制動器を設定するかなど他の考慮事項をアルゴリズムに取り入れることができる。
図8は、一実施形態による、風力タービンと共に制御装置を使用して偏揺れ又は他のパラメータを制御するための方法のフローチャートを示す。図8に示すように、ステップ220において、システムは、反復サンプリング期間(例えば、3−5分)を決定し、風速及び風向をサンプリング頻度(例えば、1サンプル/秒)でサンプリングし、ヒストグラムを追加して風速分布を特徴付ける。ステップ224において、システムは風向値をフィルタ処理して、ヒストグラムサンプリング期間の平均値を提供する。ステップ226において、サンプリング期間の最後に、システムは、タービンカットイン速度以下を切り捨てた風速ヒストグラムを積分して風資源の確率的推定を特定し、積分結果を調査し、積分結果を調べて、もしより大きな風資源があれば、その特定の信頼度(例えば65−75%の見込み)がある風速をみつけ、蓋然的風速を決定する。ステップ228において、システムは、現在の偏揺れ角度をサンプリング期間における平均風向角度から減ずることによって、目標運動を計算する。ステップ230において、システムは、蓋然性速度に対する予測タービン出力に所望のシステム効率(及び/又は他のシステム損失に対する因子)及び便益因子を乗ずることによって蓋然性速度からクレジットを計算し、そのクレジットをクレジット貯金箱に加える。ステップ232において、システムは、偏揺れを動かすためにタービン機構が必要とする電力に基づく費用因子に目標運動角度の絶対値を乗ずることによって、目標運動の費用を計算する。クレジット貯金箱が目標運動の費用より大きい場合、システムは、運動を開始させ、貯金箱から費用を減ずる。
本発明は、1つ又はそれ以上の従来の汎用若しくは専用デジタルコンピュータ、又は、本開示の教示に従ってプログラムされたマイクロプロセッサを用いて都合良く実施することができる。適切なソフトウェアコーディングは、ソフトウェア技術分野の当業者には明白であるように、本開示の教示に基づいて熟練プログラマによって容易に作成することができる。
幾つかの実施形態において、本発明は、本発明のプロセスの何れをも実行するようにコンピュータをプログラムするのに用いることができる命令を格納した格納媒体であるコンピュータプログラム製品を含む。格納媒体としては、フロピーディスク、光学ディスク、DVD、CD−ROM、マイクロドライブ、及び光磁気ディスクを含む任意の型式のディスク、ROM、RAM、EPROM、EEPROM、DRAM、VRAM、フラッシュメモリデバイス、磁気又は光学カード、ナノシステム(分子メモリICを含む)、又は、命令及び/又はデータを格納するのに適した任意の型式の媒体又はデバイスを含むことができるが、これらに限定されない。
上記の本発明の説明は、例証及び説明のために提供されたものである。これは、網羅的であること又は本発明を開示された形態だけに限定することを意図するものではない。実施形態は、本発明の原理及び実際的用途を最も良く説明し、それにより当業者が、本発明を、種々の実施形態に関し及び企図される特定の用途に適した種々の修正により理解することができるように選択され説明された。本発明の範囲は、添付の特許請求の範囲及びそれらの等価物によって規定されるものである。
100:風力タービンの環境
102:タービン
104:スマート制御装置
110:タービン動作パラメータ
112:タービンの現行パラメータ
114:タービン動作極限値
116:外部/周囲測定値
118:外部/周囲の風データ
120:他の外部データ
124:実測エネルギー生産量
126:推定エネルギー生産量
130:制御論理
131:タービン制御インタフェース
132:制御装置のサーバ/インタフェース
140:タービンの制御
144:ユーザ/顧客
146、147:診断
148、149:効率
150:風力タービン制御装置の例
152:組込み型サーバ
154:タービン動作パラメータ及び情報
160:ユーザインタフェース
162、164:タービン情報
178:偏揺れ調整便益モデル(風速ヒストグラムつまりチャート)
185:風力タービン環境
186:タービン制御/費用利益アルゴリズム又は類似のプロセス
188:サンプリング期間
190:サンプリング頻度
192:費用/便益分析
194:貯金箱からの費用の差し引き
196:クレジット貯金箱
102:タービン
104:スマート制御装置
110:タービン動作パラメータ
112:タービンの現行パラメータ
114:タービン動作極限値
116:外部/周囲測定値
118:外部/周囲の風データ
120:他の外部データ
124:実測エネルギー生産量
126:推定エネルギー生産量
130:制御論理
131:タービン制御インタフェース
132:制御装置のサーバ/インタフェース
140:タービンの制御
144:ユーザ/顧客
146、147:診断
148、149:効率
150:風力タービン制御装置の例
152:組込み型サーバ
154:タービン動作パラメータ及び情報
160:ユーザインタフェース
162、164:タービン情報
178:偏揺れ調整便益モデル(風速ヒストグラムつまりチャート)
185:風力タービン環境
186:タービン制御/費用利益アルゴリズム又は類似のプロセス
188:サンプリング期間
190:サンプリング頻度
192:費用/便益分析
194:貯金箱からの費用の差し引き
196:クレジット貯金箱
Claims (12)
- 風力タービンと共に用いる制御装置であって、
前記タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することを可能にする制御装置を含む風力タービン環境と、
外部/周囲の風データ又は他の外部データ等の環境全体に関する測定値を供給するために使用することができる1つ又はそれ以上の外部/周囲測定機器又はセンサと、
を備え、
前記タービン動作パラメータは、制御装置論理により、
実測エネルギー生産量すなわち前記タービンの現在のエネルギー出力に対する指標を計算し、
推定エネルギー生産量すなわち現在の環境条件下で前記タービンがどれほどのエネルギー出力を生成する必要があるかに関する指標を計算し、
これらの指標を比較して前記タービンに関する診断及び/又は効率等の有用なフィードバックを提供するために用いられる、
ことを特徴とする制御装置。 - 前記制御装置は、ローカルエリアネットワーク又はインターネットを介したアクセスを可能にし、前記タービンの動作パラメータ又は他の情報にアクセスし、それら情報を、遠隔監視、保守及びサポートサービスのために他のサーバに供給することを可能にする組込み型サーバを含むことを特徴とする、請求項1に記載の制御装置。
- 1つ又はそれ以上のタービンからの情報が、ウェブページ等のユーザインタフェースを介して供給されることを特徴とする、請求項1に記載の制御装置。
- 風力タービンを制御する方法であって、
前記タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することを可能にする制御装置を含む風力タービン環境と、
外部/周囲の風データ又は他の外部データ等の環境全体に関する測定値を供給するように使用することができる1つ又はそれ以上の外部/周囲測定機器又はセンサと、
を備え、
前記タービン動作パラメータは、制御装置論理により、
実測エネルギー生産量すなわち前記タービンの現在のエネルギー出力に対する指標を計算し、
推定エネルギー生産量すなわち現在の環境条件下で前記タービンがどれほどのエネルギー出力を生成する必要があるかに関する指標を計算し、
これらの指標を比較して前記タービンに関する診断及び/又は効率等の有用なフィードバックを提供するために用いられる、
ことを特徴とする方法。 - 前記制御装置は、ローカルエリアネットワーク又はインターネットを介したアクセスを可能にし、前記タービンの動作パラメータ又は他の情報にアクセスし、それら情報を、遠隔監視、保守及びサポートサービスのために他のサーバに供給することを可能にする組込み型サーバを含むことを特徴とする、請求項4に記載の方法。
- 1つ又はそれ以上のタービンからの情報が、ウェブページ等のユーザインタフェースを介して供給されることを特徴とする、請求項4に記載の方法。
- 風力タービンにおける偏揺れ又は他のパラメータを制御するためのシステムであって、
タービンの現行パラメータ及びタービン動作極限値を含むタービン動作パラメータと環境全体に関する外部/周囲測定値とを決定する手段と、
サンプリング期間における風速分布を監視し、費用/便益分析を行って偏揺れ調整等のタービン制御を行うかどうかを判断する手段と、
を備えることを特徴とするシステム。 - 前記システムは、前記タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することを可能にする制御装置と、外部/周囲の風データ又は他の外部データ等の環境全体に関する測定値を提供するために使用することができる1つ又はそれ以上の外部/周囲測定機器又はセンサと、を含むことを特徴とする、請求項7に記載のシステム。
- 前記費用/便益分析は、Kyawが特定のタービンの係数、Cost Modelが前記特定のタービンをΘ度偏揺れさせるのに必要な合計費用であるとき、Cost Model=|dΘ|×Kyaw及びExpected Benefit=f(dΘ)×Future Productionで表される、調整による相対的な改善を、システムが判断することを可能にするモデルの使用を含むことを特徴とする請求項7に記載のシステム。
- 風力タービンにおける偏揺れ又は他のパラメータを制御する方法であって、
タービンの現行パラメータ及びタービン動作極限値を含むタービン動作パラメータと環境全体に関する外部/周囲測定値とを決定するステップと、
サンプリング期間における風速分布を監視し、費用/便益分析を行って偏揺れ調整等のタービン制御を行うかどうかを判断するステップと、
を含むことを特徴とする方法。 - 前記方法は、前記タービンの幾つかの基本動作パラメータの各々を測定して、タービンの現行パラメータ及びタービン動作極限値の両方を含むタービン動作パラメータを提供することを可能にする制御装置を使用するステップと、外部/周囲の風データ又は他の外部データ等の環境全体に関する測定値を提供するために使用することができる1つ又はそれ以上の外部/周囲測定機器又はセンサを使用するステップと、を含むことを特徴とする、請求項10に記載の方法。
- 前記費用/便益分析は、Kyawが特定のタービンの係数、Cost Modelが前記特定のタービンをΘ度偏揺れさせるのに必要な合計費用であるとき、Cost Model=|dΘ|×Kyaw及びExpected Benefit=f(dΘ)×Future Productionで表される、調整による相対的な改善を、システムが判断することを可能にするモデルの使用を含むことを特徴とする請求項10に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161442135P | 2011-02-11 | 2011-02-11 | |
| US201161442136P | 2011-02-11 | 2011-02-11 | |
| US61/442,136 | 2011-02-11 | ||
| US61/442,135 | 2011-02-11 | ||
| PCT/US2012/024757 WO2012109616A2 (en) | 2011-02-11 | 2012-02-10 | System and method for controlling a wind turbine including controlling yaw or other parameters |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014508247A true JP2014508247A (ja) | 2014-04-03 |
Family
ID=46639232
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013553620A Pending JP2014508247A (ja) | 2011-02-11 | 2012-02-10 | 偏揺れ又は他のパラメータの制御を含む風力タービンを制御するためのシステム及び方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20140203562A1 (ja) |
| EP (1) | EP2673501A4 (ja) |
| JP (1) | JP2014508247A (ja) |
| CN (1) | CN103477070A (ja) |
| CA (1) | CA2827036A1 (ja) |
| MX (1) | MX2013009285A (ja) |
| WO (1) | WO2012109616A2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015065947A (ja) * | 2013-09-30 | 2015-04-13 | 不二製油株式会社 | 成形チーズ様食品 |
| JP2015065948A (ja) * | 2013-09-30 | 2015-04-13 | 不二製油株式会社 | 成形チーズ様食品 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3008207B1 (fr) * | 2013-07-04 | 2016-12-02 | M Et R Energies | Unite et procede de regulation energetique d'un systeme de production et de consommation electrique |
| DK2940295T3 (en) * | 2014-04-29 | 2018-05-22 | Gen Electric | SYSTEM AND PROCEDURE FOR MANAGING A WINDOW PARK |
| EP3037657A1 (en) * | 2014-12-23 | 2016-06-29 | ABB Technology AG | Optimal wind farm operation |
| ES2600861B1 (es) * | 2015-07-03 | 2017-11-21 | Gamesa Innovation & Technology, S.L. | Sistema de control para detectar y evitar situaciones de desalineamiento en aerogeneradores |
| CN107642457A (zh) * | 2016-07-20 | 2018-01-30 | 锐电科技有限公司 | 一种风力发电机组长周期控制参数自整定系统及方法 |
| CN108071562B (zh) * | 2016-11-17 | 2021-01-15 | 中国电力科学研究院 | 一种基于能量流的风电机组能效状态诊断方法 |
| CN110318947B (zh) * | 2018-03-30 | 2020-06-09 | 北京金风科创风电设备有限公司 | 风力发电机组的偏航控制方法、设备及系统 |
| CN108691727B (zh) * | 2018-07-03 | 2024-02-06 | 无锡风电设计研究院有限公司 | 一种风力机导流罩 |
| DK201800635A1 (en) * | 2018-09-25 | 2020-04-28 | Scada International A/S | A method for improving reporting of operational data of a wind turbine |
| CN111810358B (zh) * | 2020-07-29 | 2022-04-01 | 湘电风能有限公司 | 一种高风速工况下降低风力发电机组偏航载荷的方法 |
| EP4488508A4 (en) * | 2023-05-23 | 2025-01-15 | China Three Gorges Renewables (Group) Co., Ltd. | Method for adjusting yaw control policy, and yaw control system and medium |
| US20250198380A1 (en) * | 2023-12-14 | 2025-06-19 | Ge Infrastructure Technology Llc | Systems and methods for prioritized wake steering of wind turbines in a wind farm |
| CN120007512B (zh) * | 2025-04-18 | 2025-07-29 | 浙江大学 | 一种漂浮式风电机组动态稳定一体化规划控制方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4449053A (en) * | 1981-07-27 | 1984-05-15 | Aluminum Company Of America | Vertical axis wind turbine |
| US20030102675A1 (en) * | 2000-04-17 | 2003-06-05 | Umweltkontor Renewable Energy Ag | Power generators and method and device for generating power |
| JP4102278B2 (ja) * | 2003-03-19 | 2008-06-18 | 三菱電機株式会社 | 風力発電システム |
| US20070035135A1 (en) * | 2004-05-07 | 2007-02-15 | Mitsubishi Denki Kabushiki Kaisha | Wind power generation evaluation system and predictive control service system for use with wind power generator |
| US7118339B2 (en) * | 2004-06-30 | 2006-10-10 | General Electric Company | Methods and apparatus for reduction of asymmetric rotor loads in wind turbines |
| US7822560B2 (en) * | 2004-12-23 | 2010-10-26 | General Electric Company | Methods and apparatuses for wind turbine fatigue load measurement and assessment |
| US7199482B2 (en) * | 2005-06-30 | 2007-04-03 | General Electric Company | System and method for controlling effective wind farm power output |
| US20070124025A1 (en) * | 2005-11-29 | 2007-05-31 | General Electric Company | Windpark turbine control system and method for wind condition estimation and performance optimization |
| US7363808B2 (en) * | 2005-12-05 | 2008-04-29 | General Electric Company | Method, system and computer program product for nacelle wind speed correction |
| EP2213873A1 (en) * | 2009-01-30 | 2010-08-04 | Siemens Aktiengesellschaft | Estimating an effective wind direction for a wind turbine by means of a learning system |
| US8222757B2 (en) * | 2009-06-05 | 2012-07-17 | General Electric Company | Load identification system and method of assembling the same |
| US7763989B2 (en) * | 2009-07-07 | 2010-07-27 | General Electric Company | Method and apparatus for controlling the tip speed of a blade of a wind turbine |
| US8150641B2 (en) * | 2010-12-06 | 2012-04-03 | General Electric Company | System, device, and method for estimating possible power output of wind turbines |
| US8076789B2 (en) * | 2010-12-21 | 2011-12-13 | General Electric Company | System and method for controlling wind turbine power output |
-
2012
- 2012-02-10 JP JP2013553620A patent/JP2014508247A/ja active Pending
- 2012-02-10 CN CN2012800152893A patent/CN103477070A/zh active Pending
- 2012-02-10 US US13/984,832 patent/US20140203562A1/en not_active Abandoned
- 2012-02-10 CA CA2827036A patent/CA2827036A1/en not_active Abandoned
- 2012-02-10 EP EP12744635.9A patent/EP2673501A4/en not_active Withdrawn
- 2012-02-10 MX MX2013009285A patent/MX2013009285A/es unknown
- 2012-02-10 WO PCT/US2012/024757 patent/WO2012109616A2/en not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015065947A (ja) * | 2013-09-30 | 2015-04-13 | 不二製油株式会社 | 成形チーズ様食品 |
| JP2015065948A (ja) * | 2013-09-30 | 2015-04-13 | 不二製油株式会社 | 成形チーズ様食品 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2827036A1 (en) | 2012-08-16 |
| EP2673501A2 (en) | 2013-12-18 |
| CN103477070A (zh) | 2013-12-25 |
| US20140203562A1 (en) | 2014-07-24 |
| MX2013009285A (es) | 2014-02-06 |
| EP2673501A4 (en) | 2016-04-13 |
| WO2012109616A3 (en) | 2012-12-06 |
| WO2012109616A2 (en) | 2012-08-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014508247A (ja) | 偏揺れ又は他のパラメータの制御を含む風力タービンを制御するためのシステム及び方法 | |
| CN104620458B (zh) | 确定发电站控制器中的各个设定点的方法和发电站控制器 | |
| Dai et al. | Ageing assessment of a wind turbine over time by interpreting wind farm SCADA data | |
| US9606518B2 (en) | Control system and method of predicting wind turbine power generation | |
| CN102539538B (zh) | 用于监测风力涡轮的方法和系统 | |
| US8046109B2 (en) | Method and systems for operating a wind turbine | |
| CN102003341B (zh) | 用于风力方案集的系统和方法 | |
| US10578080B2 (en) | Initialisation of wind turbine control functions | |
| US20110123331A1 (en) | Wind speed dependent adaptation of a set point for a fatigue life of a structural component of a wind turbine | |
| CN104641529A (zh) | 用于确定发电设备控制器中的个体设定点的方法和发电设备控制器 | |
| CN102454546B (zh) | 检验至少一个风力涡轮机传感器的运行的控制系统和方法 | |
| EP3859149B1 (en) | Turbulence intensity estimation | |
| US20140103652A1 (en) | System and method of selecting wind turbine generators in a wind park for curtailment of output power to provide a wind reserve | |
| US20160226258A1 (en) | Method for controlling a power consumption of a group of a plurality of wind turbines | |
| CN101846037A (zh) | 风力涡轮机操作系统和方法 | |
| CN103109085A (zh) | 风力发电站的控制 | |
| CN112739904B (zh) | 操作混合动力发电厂以优化pv功率输出的方法 | |
| EP3608538A1 (en) | Model-based repowering solutions for wind turbines | |
| CN111327070A (zh) | 风电场能量管理方法及系统 | |
| CN107514336B (zh) | 风速信息处理方法及装置和变桨控制方法、装置及系统 | |
| KR101032930B1 (ko) | 디지털 풍속 추정 모듈과 가변속제어모듈을 통한 풍력발전기 최적제어형 통합 관리 장치 및 방법 | |
| CN103048535B (zh) | 用于发电系统中自适应可能功率确定的系统和方法 | |
| CN114033617B (zh) | 一种控制参量自适应调整的可控风力发电方法及系统 | |
| JP5272112B1 (ja) | 風力発電システム、その制御装置、及びその制御方法 | |
| Asnaz | A case study: Small scale wind turbine system selection and economic viability |