JP2015018330A - 移動体の方向別計数システム - Google Patents
移動体の方向別計数システム Download PDFInfo
- Publication number
- JP2015018330A JP2015018330A JP2013143779A JP2013143779A JP2015018330A JP 2015018330 A JP2015018330 A JP 2015018330A JP 2013143779 A JP2013143779 A JP 2013143779A JP 2013143779 A JP2013143779 A JP 2013143779A JP 2015018330 A JP2015018330 A JP 2015018330A
- Authority
- JP
- Japan
- Prior art keywords
- image
- unit
- detection line
- moving
- vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



























Landscapes
- Image Analysis (AREA)
Abstract
【課題】構成を簡素化し、高速処理を可能にする。
【解決手段】定点カメラにより人が出入りするゲート付近を撮影し、時系列で並べられた複数のフレーム画像からなる動画を収録する。画像上のゲート位置に、検出ラインLを設定し、その上に所定間隔でn個の検出基準点E(j)を設定する(j=1〜n)。各検出基準点E(j)を中心として微小領域からなるブロックを設定し、個々のブロック内の着目単位画像が次のフレームでどこへ移動するかを認識し、第i番目のフレームを探索して第j番目の検出基準点E(j)の位置にあった着目単位画像の移動経路を示す変位ベクトルV(i,j)を求める。ベクトルV(i,j)の検出ラインLに対する法線成分を、パラメータi,jを変化させながら、図の上方に向かう成分と下方に向かう成分とが別々に加算されるように集計し、各集計値を各方向に移動する人間の数に比例する値として出力する。
【選択図】図12
【解決手段】定点カメラにより人が出入りするゲート付近を撮影し、時系列で並べられた複数のフレーム画像からなる動画を収録する。画像上のゲート位置に、検出ラインLを設定し、その上に所定間隔でn個の検出基準点E(j)を設定する(j=1〜n)。各検出基準点E(j)を中心として微小領域からなるブロックを設定し、個々のブロック内の着目単位画像が次のフレームでどこへ移動するかを認識し、第i番目のフレームを探索して第j番目の検出基準点E(j)の位置にあった着目単位画像の移動経路を示す変位ベクトルV(i,j)を求める。ベクトルV(i,j)の検出ラインLに対する法線成分を、パラメータi,jを変化させながら、図の上方に向かう成分と下方に向かう成分とが別々に加算されるように集計し、各集計値を各方向に移動する人間の数に比例する値として出力する。
【選択図】図12
Description
本発明は、移動体の方向別計数システムに関し、特に、定点撮影により得られた動画を解析することにより、視野内を移動した物体を方向別に計数するシステムに関する。
特定の場所における移動体の数を計数することは、特定施設への入場者数を把握したり、特定路線の交通量を把握したりする上で重要である。特に、入場者数と退場者数とを区別して集計したり、上り交通量と下り交通量とを区別して集計したりする上では、移動体を方向別に計数する必要がある。
このような移動体の方向別計数システムとして、移動体の動きを定点から撮影し、得られた動画画像を解析することにより、移動体の数を方向別に計数するシステムが提案されている。たとえば、下記の特許文献1には、画像上に所定の計数ラインを設定し、この計数ライン上において背景画像との差分処理を行うことにより人物領域を抽出し、この人物領域の面積から人数を推定し、更に、計数ラインの両脇に設定した方向判定ラインを用いて移動方向を認識する技術が開示されている。
また、特許文献2には、画像上に設定された変化検出エリア内について、背景画像を用いた差分処理を行うことにより人物を検出し、移動方向判定ラインに到達するまでテンプレートマッチングを行って人物を追跡し、追跡完了までの移動面積の積算値に基づいて人数を特定する技術が開示されている。
前述した従来のシステムでは、画像上で人物等の移動体を認識し、この移動体を追跡することにより計数を行う必要があるため、画像の解析処理が複雑になり、システムに大きな処理負担がかかるという問題がある。また、人物を検出するラインの両側に、移動方向を検出するためのラインやエリアを設定する必要があり、移動方向の認識処理も複雑にならざるを得ない。このため、装置の構成は複雑になり、処理時間も長くならざるを得ない。
そこで本発明は、できるだけ構成を簡素化し、高速処理が可能な移動体の方向別計数システムを提供することを目的とする。
(1) 本発明の第1の態様は、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数する移動体の方向別計数システムを、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを越えて一方の領域から他方の領域に移動した移動体の数もしくは量を示す計数値を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数のブロックを設定するブロック設定部と、
複数のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
所定の着目時点におけるフレーム画像から個々のブロック内の画像をそれぞれ着目単位画像として抽出する処理を、着目時点を次々と変化させながら繰り返し行う着目単位画像抽出部と、
着目時点の前もしくは後の参照時点におけるフレーム画像に対して、個々のブロックについて設定された探索領域内を探索し、それぞれ対応するブロックについて抽出された着目単位画像に最も類似する同サイズの画像を最類似単位画像と決定する処理を、着目時点を次々と変化させながら繰り返し行う最類似単位画像決定部と、
着目単位画像抽出部によって抽出された個々の着目単位画像と、これらに対応して最類似単位画像決定部によって決定された個々の最類似単位画像と、について、時系列に沿って一方から他方に向かう変位ベクトルをそれぞれ定義する変位ベクトル定義部と、
各変位ベクトルについて、検出ラインに対する法線方向成分を示す法線ベクトルをそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルのうち、一方の領域から他方の領域への移動を示す方向を向いたベクトルの長さを集計して集計値を求める処理を行うベクトル長集計部と、
この集計値に基づいて計数値を出力する計数値算出部と、
を備えている。
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを越えて一方の領域から他方の領域に移動した移動体の数もしくは量を示す計数値を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数のブロックを設定するブロック設定部と、
複数のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
所定の着目時点におけるフレーム画像から個々のブロック内の画像をそれぞれ着目単位画像として抽出する処理を、着目時点を次々と変化させながら繰り返し行う着目単位画像抽出部と、
着目時点の前もしくは後の参照時点におけるフレーム画像に対して、個々のブロックについて設定された探索領域内を探索し、それぞれ対応するブロックについて抽出された着目単位画像に最も類似する同サイズの画像を最類似単位画像と決定する処理を、着目時点を次々と変化させながら繰り返し行う最類似単位画像決定部と、
着目単位画像抽出部によって抽出された個々の着目単位画像と、これらに対応して最類似単位画像決定部によって決定された個々の最類似単位画像と、について、時系列に沿って一方から他方に向かう変位ベクトルをそれぞれ定義する変位ベクトル定義部と、
各変位ベクトルについて、検出ラインに対する法線方向成分を示す法線ベクトルをそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルのうち、一方の領域から他方の領域への移動を示す方向を向いたベクトルの長さを集計して集計値を求める処理を行うベクトル長集計部と、
この集計値に基づいて計数値を出力する計数値算出部と、
を備えている。
(2) 本発明の第2の態様は、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数する移動体の方向別計数システムを、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、第2の領域から第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第(i−1)番目のフレーム画像F(i−1)から、第j番目のブロックB(j)内の画像を着目単位画像P(i−1,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第i番目のフレーム画像F(i)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i−1,j)に最も類似する同サイズの画像を最類似単位画像Q(i,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
着目単位画像P(i−1,j)の位置から最類似単位画像Q(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
各変位ベクトルV(i,j)について、検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルN(i,j)のうち、第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
第1方向集計値T1に基づいて第1計数値C1を算出する処理と、第2方向集計値T2に基づいて第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を備えている。
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、第2の領域から第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第(i−1)番目のフレーム画像F(i−1)から、第j番目のブロックB(j)内の画像を着目単位画像P(i−1,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第i番目のフレーム画像F(i)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i−1,j)に最も類似する同サイズの画像を最類似単位画像Q(i,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
着目単位画像P(i−1,j)の位置から最類似単位画像Q(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
各変位ベクトルV(i,j)について、検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルN(i,j)のうち、第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
第1方向集計値T1に基づいて第1計数値C1を算出する処理と、第2方向集計値T2に基づいて第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を備えている。
(3) 本発明の第3の態様は、上述した第2の態様に係る移動体の方向別計数システムにおいて、
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各検出基準点E(j)から各最類似単位画像Q(i,j)の中心点H(i,j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)について、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義するようにしたものである。
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各検出基準点E(j)から各最類似単位画像Q(i,j)の中心点H(i,j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)について、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義するようにしたものである。
(4) 本発明の第4の態様は、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数する移動体の方向別計数システムを、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、第2の領域から第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第i番目のフレーム画像F(i)から、第j番目のブロックB(j)内の画像を着目単位画像P(i,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第(i−1)番目のフレーム画像F(i−1)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i,j)に最も類似する同サイズの画像を最類似単位画像Q(i−1,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
最類似単位画像Q(i−1,j)の位置から着目単位画像P(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
各変位ベクトルV(i,j)について、検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルN(i,j)のうち、第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
第1方向集計値T1に基づいて第1計数値C1を算出する処理と、第2方向集計値T2に基づいて第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を備えている。
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、第2の領域から第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
によって構成したものである。
ここで、画像解析装置は、
計数対象期間に渡って撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
フレーム画像上に検出ラインを設定する検出ライン設定部と、
検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第i番目のフレーム画像F(i)から、第j番目のブロックB(j)内の画像を着目単位画像P(i,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第(i−1)番目のフレーム画像F(i−1)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i,j)に最も類似する同サイズの画像を最類似単位画像Q(i−1,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
最類似単位画像Q(i−1,j)の位置から着目単位画像P(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
各変位ベクトルV(i,j)について、検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
各法線ベクトルN(i,j)のうち、第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
第1方向集計値T1に基づいて第1計数値C1を算出する処理と、第2方向集計値T2に基づいて第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を備えている。
(5) 本発明の第5の態様は、上述した第4の態様に係る移動体の方向別計数システムにおいて、
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各最類似単位画像Q(i−1,j)の中心点H(i−1,j)から各検出基準点E(j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)をその始点が各検出基準点E(j)の位置にくるように平行移動し、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義するようにしたものである。
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各最類似単位画像Q(i−1,j)の中心点H(i−1,j)から各検出基準点E(j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)をその始点が各検出基準点E(j)の位置にくるように平行移動し、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義するようにしたものである。
(6) 本発明の第6の態様は、上述した第1〜第5の態様に係る移動体の方向別計数システムにおいて、
検出ライン設定部が、フレーム画像上に重ねて配置された直線、曲線、もしくは図形を指定するオペレータの描画操作に基づいて、検出ラインの設定を行うようにしたものである。
検出ライン設定部が、フレーム画像上に重ねて配置された直線、曲線、もしくは図形を指定するオペレータの描画操作に基づいて、検出ラインの設定を行うようにしたものである。
(7) 本発明の第7の態様は、上述した第1〜第6の態様に係る移動体の方向別計数システムにおいて、
ブロック設定部が、検出ラインに沿って、相互に部分的な重なりを生じる位置に複数のブロックを設定するようにしたものである。
ブロック設定部が、検出ラインに沿って、相互に部分的な重なりを生じる位置に複数のブロックを設定するようにしたものである。
(8) 本発明の第8の態様は、上述した第1〜第7の態様に係る移動体の方向別計数システムにおいて、
ブロック設定部が、縦にa個、横にb個の画素が並んだ画素配列を含む矩形状のブロックを設定し、
探索領域設定部が、当該画素配列およびその上方、下方、左方、右方にそれぞれ配置された周辺画素配列を包含する矩形状の探索領域を設定するようにしたものである。
ブロック設定部が、縦にa個、横にb個の画素が並んだ画素配列を含む矩形状のブロックを設定し、
探索領域設定部が、当該画素配列およびその上方、下方、左方、右方にそれぞれ配置された周辺画素配列を包含する矩形状の探索領域を設定するようにしたものである。
(9) 本発明の第9の態様は、上述した第8の態様に係る移動体の方向別計数システムにおいて、
最類似単位画像決定部が、縦にa個、横にb個の画素が並んだ画素配列を収容可能な候補枠を、探索領域内の配置可能な各位置に配置し、各位置において候補枠内の画像を候補単位画像として抽出し、抽出された候補単位画像のうち着目単位画像に最も類似する画像を最類似単位画像と決定するようにしたものである。
最類似単位画像決定部が、縦にa個、横にb個の画素が並んだ画素配列を収容可能な候補枠を、探索領域内の配置可能な各位置に配置し、各位置において候補枠内の画像を候補単位画像として抽出し、抽出された候補単位画像のうち着目単位画像に最も類似する画像を最類似単位画像と決定するようにしたものである。
(10) 本発明の第10の態様は、上述した第9の態様に係る移動体の方向別計数システムにおいて、
撮影装置として、三原色R,G,Bの各画素値Pr,Pg,Pbが定義された画素の集合体からなるフレーム画像を収録する装置を用い、
最類似単位画像決定部が、着目単位画像内の第h番目(但し、1≦h≦H,H=a×b)の画素の画素値をPr(h),Pg(h),Pb(h)とし、候補単位画像内の第h番目の画素の画素値をUr(h),Ug(h),Ub(h)としたときに、
ξ = Σh=1〜H (|Pr(h)−Ur(h)|+
|Pg(h)−Ug(h)|+
|Pb(h)−Ub(h)|)
なる式で定義される相違度ξが最小となる候補単位画像を最類似単位画像と決定するようにしたものである。
撮影装置として、三原色R,G,Bの各画素値Pr,Pg,Pbが定義された画素の集合体からなるフレーム画像を収録する装置を用い、
最類似単位画像決定部が、着目単位画像内の第h番目(但し、1≦h≦H,H=a×b)の画素の画素値をPr(h),Pg(h),Pb(h)とし、候補単位画像内の第h番目の画素の画素値をUr(h),Ug(h),Ub(h)としたときに、
ξ = Σh=1〜H (|Pr(h)−Ur(h)|+
|Pg(h)−Ug(h)|+
|Pb(h)−Ub(h)|)
なる式で定義される相違度ξが最小となる候補単位画像を最類似単位画像と決定するようにしたものである。
(11) 本発明の第11の態様は、上述した第10の態様に係る移動体の方向別計数システムにおいて、
最類似単位画像決定部が、相違度ξの最小値ξminが所定のしきい値ξthに対して、ξmin>ξthである場合には、「最類似単位画像なし」との決定を行い、
変位ベクトル定義部が、「最類似単位画像なし」との決定が行われた特定の着目単位画像については変位ベクトルの定義を行わず、
法線ベクトル定義部が、当該特定の着目単位画像については法線ベクトルの定義を行わず、
ベクトル長集計部が、定義が行われていない法線ベクトルについては長さの集計を行わないようにしたものである。
最類似単位画像決定部が、相違度ξの最小値ξminが所定のしきい値ξthに対して、ξmin>ξthである場合には、「最類似単位画像なし」との決定を行い、
変位ベクトル定義部が、「最類似単位画像なし」との決定が行われた特定の着目単位画像については変位ベクトルの定義を行わず、
法線ベクトル定義部が、当該特定の着目単位画像については法線ベクトルの定義を行わず、
ベクトル長集計部が、定義が行われていない法線ベクトルについては長さの集計を行わないようにしたものである。
(12) 本発明の第12の態様は、上述した第1〜第11の態様に係る移動体の方向別計数システムにおいて、
計数値算出部が、オペレータから所定の係数Kもしくは当該係数Kを決定するための情報を入力する機能を有し、ベクトル長集計部が求めた集計値を当該係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力するようにしたものである。
計数値算出部が、オペレータから所定の係数Kもしくは当該係数Kを決定するための情報を入力する機能を有し、ベクトル長集計部が求めた集計値を当該係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力するようにしたものである。
(13) 本発明の第13の態様は、上述した第1〜第11の態様に係る移動体の方向別計数システムにおいて、
計数値算出部が、複数通りの係数Kを記憶しており、時刻、日付、曜日、季節もしくは天候に応じて1つの係数Kを選択する機能を有し、ベクトル長集計部が求めた集計値を、選択された係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力するようにしたものである。
計数値算出部が、複数通りの係数Kを記憶しており、時刻、日付、曜日、季節もしくは天候に応じて1つの係数Kを選択する機能を有し、ベクトル長集計部が求めた集計値を、選択された係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力するようにしたものである。
(14) 本発明の第14の態様は、上述した第1〜第13の態様に係る移動体の方向別計数システムにおいて、
検出ライン設定部が、検出ラインに沿って重みパラメータを設定する機能を有し、
ベクトル長集計部が、法線ベクトルの長さを集計して集計値を求める際に、個々の法線ベクトルの長さに当該法線ベクトルの位置に対応した重みパラメータを乗じた値の和を求めるようにしたものである。
検出ライン設定部が、検出ラインに沿って重みパラメータを設定する機能を有し、
ベクトル長集計部が、法線ベクトルの長さを集計して集計値を求める際に、個々の法線ベクトルの長さに当該法線ベクトルの位置に対応した重みパラメータを乗じた値の和を求めるようにしたものである。
(15) 本発明の第15の態様は、上述した第14の態様に係る移動体の方向別計数システムにおいて、
検出ライン設定部が、検出ライン上の2点についての寸法パラメータを指定するオペレータの入力操作を受け、これら2点についての寸法パラメータに基づく線形補間処理により、検出ライン上の任意の位置における重みパラメータを決定するようにしたものである。
検出ライン設定部が、検出ライン上の2点についての寸法パラメータを指定するオペレータの入力操作を受け、これら2点についての寸法パラメータに基づく線形補間処理により、検出ライン上の任意の位置における重みパラメータを決定するようにしたものである。
(16) 本発明の第16の態様は、上述した第1〜第15の態様に係る移動体の方向別計数システムにおける画像解析装置を独立した装置として提供するようにしたものである。
(17) 本発明の第17の態様は、上述した第16の態様に係る画像解析装置を、コンピュータにプログラムを組み込むことにより構成したものである。
(18) 本発明の第18の態様は、上述した第16の態様に係る画像解析装置を、半導体集積回路により構成したものである。
(19) 本発明の第19の態様は、上述した第1〜第15の態様に係る移動体の方向別計数システムにおける撮影装置を所定の搬送路上を流れる物品を撮影できる位置に配置し、画像解析装置により当該搬送路上を流れる物品の個数をカウントするようにして、移動物品の個数カウントシステムを構成したものである。
(20) 本発明の第20の態様は、上述した第1〜第15の態様に係る移動体の方向別計数システムにおける撮影装置を、送出ロールから送り出されてから巻取ロールで巻き取られるまで、所定の処理経路上を流れる巻取材料を撮影できる位置に配置し、画像解析装置により当該処理経路上を流れる巻取材料の模様パターンをカウントするようにして、巻取材料の搬送量カウントシステムを構成したものである。
本発明に係る移動体の方向別計数システムでは、画像上に設定した検出ライン近傍の画像の流れが変位ベクトルとして抽出される。そしてこの変位ベクトルの、検出ラインに対する法線方向成分の大きさの総和に基づいて、検出ラインを跨いだ双方向の移動成分量を別々に求めることができる。こうして得られた移動成分量は、移動体の個数自体を直接的に示すものではないが、移動体の個数にほぼ比例した値を示すものになる。したがって、必要があれば、所定の係数を用いた補正を行うことにより、移動体の個数もしくはその近似値を得ることができる。
本発明では、画像から個々の移動体を認識する必要はなく、これを追跡する必要もない。したがって、移動体認識処理や移動体追跡処理を行う必要はなくなり、装置構成を簡素化することができる。また、移動体の移動方向は、検出ライン近傍に得られる変位ベクトルの向きにより把握できるため、移動方向を検出するためのラインやエリアの設定も不要になり、装置構成の更なる簡素化を図ることができる。その結果、処理の高速化を図ることも可能になる。
このように、本発明によれば、装置構成を簡素化し、高速処理が可能な移動体の方向別計数システムを実現することができる。
以下、本発明を図示する実施形態に基づいて説明する。
<<< §1. 本発明の基本原理 >>>
はじめに、本発明に係る計数システムの基本原理を、図示した具体例に即して説明する。本発明は、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数する機能をもったシステムである。計数対象となる移動体は任意の物体でかまわないが、ここでは歩行中の人物を計数対象とした例を説明する。
はじめに、本発明に係る計数システムの基本原理を、図示した具体例に即して説明する。本発明は、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数する機能をもったシステムである。計数対象となる移動体は任意の物体でかまわないが、ここでは歩行中の人物を計数対象とした例を説明する。
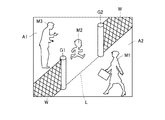
図1は、ある施設に出入りするゲート(たとえば、学校の校門)の近傍を定点カメラで撮影した状態を示す平面図である。このように、本発明に係るシステムでは、撮影装置を定点に設置し、所定の撮影対象範囲を同一視野で撮影して動画を収録し、これを画像解析装置によって解析することにより移動体の計数を行うことになる。収録された動画は、時系列で並べられた複数のフレーム画像によって構成され、図1は、そのようなフレーム画像の1枚を示している。撮影装置は、所定の撮影対象範囲を定点から同一視野で撮影しているため、複数のフレーム画像の背景画像はすべて同一になり、この背景画像上で移動体の位置が時々刻々と変化してゆくことになる。
図示の例の場合、撮影対象範囲には、2本のゲート支柱G1,G2が存在し、その両脇には塀Wが設けられているので、歩行中の人物(移動体)は、2本のゲート支柱G1,G2の間を通ってこのゲートを出入りすることになる。そこで、図に破線で示すような検出ラインLを設定し、この検出ラインLを跨いで通過する人物の数を計数するものとしよう。ここでは、便宜上、検出ラインLおよび塀Wで区分けされた左上の領域(たとえば、学校の構内)を第1の領域A1と呼び、右下の領域(たとえば、道路)を第2の領域A2と呼ぶことにする。図示のフレーム画像上では、人物M1がゲートを通って構内A1に入ろうとしており、人物M2,M3が道路A2へ出ようとしている。
本発明に係るシステムは、このようなフレーム画像を解析することにより、所定の計数対象期間内に、検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数を示す計数値を求める役割を果たす。すなわち、本発明に係るシステムは、移動体を移動方向別に計数する機能をもったシステムであるが、ここで「移動方向別に計数する」なる文言の意味は、検出ラインLを跨いで第1の領域A1から第2の領域A2へ向かう第1方向に移動した移動体(図示の例では、校門を通って構内から出た人物)と、逆に、検出ラインLを跨いで第2の領域A2から第1の領域A1へ向かう第2方向に移動した移動体(図示の例では、校門を通って構内に入った人物)と、をそれぞれ別個に計数するという意味である。
図2は、図1に示す画像に基づいて、検出ラインLを越えて移動する人物の計数を行う様子を示す平面図である。図にハッチングを施して示す領域は、3人の人物M1〜M3、すなわち、計数対象となる移動体の占有領域であり、直線Lは、図1に示す検出ラインLに対応するものである。実際には、人物が徒歩で跨いで移動可能な境界線は、図1に破線で示すように、2本のゲート支柱G1,G2の間の区間のみであり、塀Wを越えて移動することはできない。ただ、図2では、便宜上、図1に示す検出ラインLを延長し、この検出ラインLによって、フレーム画像を構成する矩形領域を、第1の領域A1と第2の領域A2とに区分けして示す。
さて、この例の場合、人物M1は構内に入ろうとしているので、フレーム画像上の人物M1の位置は時間とともに図の左上方向に移動し、やがて検出ラインLを越えて第1の領域A1へ侵入することになる。一方、人物M2,M3は構内から出ようとしているので、フレーム画像上の人物M2,M3の位置は時間とともに図の右下方向に移動し、やがて検出ラインLを越えて第2の領域A2へ侵入することになる。したがって、そのような状況を撮影した動画を解析すると、第1の領域A1から第2の領域A2に移動した人物は2名、第2の領域A2から第1の領域A1に移動した人物は1名、という計数結果が得られることになる。
前掲の特許文献1,2に開示されているような従来の計数システムの場合、このような計数結果を得るために、フレーム画像上で個々の移動体を認識し、この移動体を追跡することにより計数を行う必要がある。具体的には、まず、時系列で順次得られる個々のフレーム画像を背景画像と比較し、両者の差分をとることにより移動体を認識し、テンプレートマッチングを行って当該移動体を、後続するフレーム画像上で追跡してゆく処理を行わねばならない。しかも、第1の領域A1側および第2の領域A2側に、それぞれ移動方向を認識するためのラインやエリアを設けておき、追跡中の移動体がこれらのラインやエリアに到達したことを認識することにより、各移動体の移動方向を認識する処理が必要になる。このため、装置の構成は複雑になり、処理時間も長くなるという問題があることは、既に述べたとおりである。
本発明は、このような問題に対処するため、できるだけ構成を簡素化し、高速処理が可能な移動体の方向別計数システムを提供することを目的としてなされたものである。以下、その基本的な着想を、縄暖簾(なわのれん)を用いたモデルで説明する。
図3は、本発明の基本原理を説明するための縄暖簾10を取り付けたゲートの仮想モデルを示す正面図であり、図1に例示した校門を第2の領域A2側(道路側)から眺めた状態を示している。いま、図示のとおり、2本のゲート支柱G1,G2の間に縄暖簾10を取り付けたものとしよう。この縄暖簾10は、図に破線で示す検出ラインLの直上に配置されており、移動体(人物)は、この縄暖簾10を通り抜けて校門を出入りすることになる。縄暖簾10は、多数の縄Rを鉛直方向に垂下させた構成を有しており、人物が通り抜けると、人物と接触した縄Rの位置が変位する。
図4は、図3に示す縄暖簾10の各縄Rの下端の動きを示す平面図である。図4において、検出ラインL上に並んだ多数の円は、縄暖簾10を構成する個々の縄Rの下端を示しており、検出ラインLの上方が第1の領域A1(構内)、下方が第2の領域A2(構外)に対応する。校門を通過する人物がいない場合、各縄Rは鉛直垂下状態を維持するので、図4(a) に示すとおり、すべての縄Rの下端は検出ラインL上に整列した状態になる。
一方、図4(b) は、図1に示す人物M1が校門を通過して構内に入ろうとし、人物M2が校門を通過して構外へ出ようとした瞬間における個々の縄Rの下端の位置を示す図である。図示のとおり、人物M1に接触した縄Rは第1の領域A1側へと押し出され、人物M2に接触した縄Rは第2の領域A2側へと押し出される。なお、実在の縄暖簾10を用いた場合、個々の縄Rの移動方向は、様々な方向を向くことになるであろうが、ここでは説明の便宜上、すべての縄Rは、検出ラインLの法線方向(すなわち、検出ラインLに直交する方向)にのみ動くものとする。
そうすると、図4(c) に示すように、個々の縄Rの下端の変位は、この平面図における上方向(領域A1に向かう方向)か下方向(領域A2に向かう方向)かのいずれかになる。ここでは、上方向の変位量を正の値、下方向の変位量を負の値で示すことにし、上方向に変位した縄をR(+)、下方向に変位した縄をR(−)と呼び、縄R(+)の変位量をd(+)、縄R(−)の変位量をd(−)とする。変位量d(+)は正の値、変位量d(−)は負の値をとる。図示の例の場合、人物M1に接触した縄R(+)は正の変位量d(+)をもって変位し、人物M2に接触した縄R(−)は負の変位量d(−)をもって変位する。
このようなモデルでは、縄暖簾10を構成する個々の縄Rの変位量は、検出ラインLを通過した移動体に関する情報を有していることになる。たとえば、所定の計数対象期間に渡って、個々の縄Rの変位量を検出し、正の変位量d(+)と負の変位量d(−)とをそれぞれ別個独立して集計すれば、正の集計値は、各縄Rの領域A1に向かう方向に関する変位量の合計を示し、検出ラインLを領域A1に向かって通過した人数に関連した値になり、負の集計値は、各縄Rの領域A2に向かう方向に関する変位量の合計を示し、検出ラインLを領域A2に向かって通過した人数に関連した値になる。
個々の縄Rの変位量の集計は、所定の空間的な広がりをもった区間全体に対して、かつ、所定の時間的な広がりをもった期間全体に対して実行される。たとえば、図4に示す例の場合、検出ラインLに沿って12本の縄Rが配置されており、この配置区間(図3に示す2本のゲート支柱G1,G2の間の区間)に渡って空間的な集計が行われる。また、個々の縄Rの変位検出を所定のサンプリング周期で繰り返し実行すれば、計数対象期間に渡って時間的な集計が行われる。このように、所定の検出ラインLに沿った空間的な集計を行うとともに、所定の計数対象期間に渡って時間的な集計を行えば、得られる正の集計値および負の集計値は、空間的かつ時間的な統計量になる。
このように、本発明に係る計数システムで得られる計数値は、移動体の数を正確に示す値ではなく、統計的な値ということになる。たとえば、図4(b) に示す例の場合、人物M1は大人、人物M2は子供であり、当然、体格に差がある。したがって、図4(c) において、正の変位量d(+)の総和と負の変位量d(−)の総和とを、その絶対値で比較すると、前者の方が後者よりも大きくなる。しかしながら、空間的かつ時間的に積算された各変位量の総和は、統計量としての意味をもち、検出ラインLを跨いで各方向に向かって通過した人数を示す統計値として利用することができる。
たとえば、朝8時〜9時の1時間を計数対象期間として、縄暖簾10の各縄Rの変位量を所定のサンプリング周期で検出し、正の変位量d(+)と負の変位量d(−)とを別個に集計した結果、前者の集計値として+8000、後者の集計値として−500なる結果が得られたとしよう。この場合、これらの数値の絶対値自体は、人数を直接示すものではないが、統計的な見地からは、検出ラインLを越えて領域A1内(構内)に移動した人数は、検出ラインLを越えて領域A2内(構外)に移動した人数の16倍(8000/500)であることが認識できる。この場合、8000や500といった集計値の絶対値は、移動体の数そのものではないが、移動量を示す数値としての意味をもつ。
現実の社会では、移動体の正確な個数を示す計数値は必要なく、統計的に意味のある計数値が得られれば十分であることが多い。たとえば、上例の場合、午後3時〜4時の1時間を計数対象期間としたときに、正の集計値として+400、負の集計値として−6000なる結果が得られたとしよう。この場合、8時〜9時の登校時に構内に入る人数は、3時〜4時の下校時に構内に入る人数の20倍(8000/400)であり、8時〜9時の登校時に構外へ出る人数は、3時〜4時の下校時に構外へ出る人数の12分の1(500/6000)であることがわかる。
また、1日24時間を1時間ごとの計数対象期間に区切って、1日の出入り人数を比較することもできるし、季節や曜日による比較を行うこともできる。移動体として人物の代わりに車両を計数対象とした場合は、時間ごとや曜日ごとに交通量を比較するための統計データを得ることができる。
もちろん、こうして得られた集計値をそのまま最終的な計数値として出力してもよいが、その代わりに、所定の補正係数Kを用いた補正を行うことにより、移動体の実際の個数に近い概算値を最終的な計数値として出力することも可能である。
たとえば、ある日の特定の1時間をサンプル期間として集計した結果、正の集計値として+7000が得られたとしよう。そして、当該サンプル期間の動画画像を見ながら、検出ラインLを越えて領域A1内(構内)に移動した人の人数を手作業で計数した結果(あるいは、従来提案されている計数システムを用いて自動的に計数してもよい)、1時間の間に70人が構内に入ったことが判明したものとしよう。この場合、当該サンプル期間に関しては、1移動体あたりの集計値が100であることがわかる(7000÷70)。そこで、この1移動体あたりの集計値を係数Kとして、任意の計数対象期間について得られた集計値を当該係数Kで除した値を実際の移動体の個数を示す計数値として出力すればよい。
上例の場合、8時〜9時の登校時には、正の集計値+8000、負の集計値−500が得られているので、係数K=100で除することにより、構内に入った人数の計数値80人、構外に出た人数の計数値5人、という値を最終的な計数値として出力することができる。もちろん、こうして得られた人数は、フレーム画像上で個々の人物を認識し、これを追跡する処理によって計数されたものではないので、必ずしも正確な人数ではない。実際には、大人や子供といった体格差のある様々な人物が出入りをするであろうし、最終的に得られる計数値は、係数Kを用いた除算により小数点以下の端数が生じる値になろう。
しかしながら、現実の社会で移動体の計数が必要なケースでは、このような統計的な概算値が得られれば十分である場合がほとんどである。たとえば、街の祭礼や花火大会といったイベントにおける人出調査や、路面における交通量の調査では、それほど正確な計数値は必要とされず、たとえば、千人単位の概数で示される人数や、千台単位の概数で示される交通量が取得できれば十分なことが多い。このように、本発明に係る計数システムの基本原理では、移動体の正確な個数を示す計数値を得ることはできないが、実用上、十分に意義のある相対計数値もしくは概算計数値を得ることができる。
上記基本原理によれば、フレーム画像から個々の移動体を認識する必要はなく、これを追跡する必要もない。必要なのは、検出ラインL上に設けられた縄暖簾10を構成する個々の縄Rの変位量を方向別に集計する処理だけである。別言すれば、図2に示すフレーム画像について、検出ラインLに沿った帯状領域内について画像の動きを解析すれば足り、個々の人物M1〜M3を移動体として認識したり、後続フレーム画像上でこれを追跡したりする必要はない。また、移動方向は、検出ラインLに沿った帯状領域内についての画像の変位量を2通りの法線方向成分に分けて集計すれば足りるので、検出ラインLの両脇に移動方向を検出するためのラインやエリアを設定する必要もない。かくして、本発明によれば、装置構成を簡素化し、高速処理が可能な移動体の方向別計数システムを実現することができる。
以上、本発明の基本原理を、図3に示す縄暖簾10を用いたモデルを用いて説明したが、もちろん、このモデルは発明の原理を説明するための模擬的な仮想モデルであり、実際の計数システムにおいて縄暖簾10が利用されるわけではない。本発明に係る実際の計数システムでは、個々のフレーム画像上に検出ラインLを設定し、この検出ラインLに沿った帯状領域内についての画像の時間的な変化を解析することにより、縄暖簾の変位に相当する変位量を算出し、これを方向別に集計することにより最終的な計数値を得ることになる。その具体的な構成および処理動作については、§2以降で詳述する。
<<< §2. 本発明の基本的な実施形態 >>>
上述した§1では、本発明の基本原理を縄暖簾の仮想モデルに基づいて説明したが、ここでは、本発明に係る移動体の方向別計数システムの構成および動作を、具体的な実施形態に基づいて説明する。
上述した§1では、本発明の基本原理を縄暖簾の仮想モデルに基づいて説明したが、ここでは、本発明に係る移動体の方向別計数システムの構成および動作を、具体的な実施形態に基づいて説明する。
<2−1. 基本的実施形態の全体構成>
図5は、本発明の基本的実施形態に係る移動体の方向別計数システムの構成を示すブロック図である。このシステムは、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数するシステムであり、撮影装置100、画像解析装置200、ディスプレイ装置300によって構成されている。
図5は、本発明の基本的実施形態に係る移動体の方向別計数システムの構成を示すブロック図である。このシステムは、複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数するシステムであり、撮影装置100、画像解析装置200、ディスプレイ装置300によって構成されている。
撮影装置100は、所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する装置であり、一般的な動画撮影機能をもったデジタルカメラや監視カメラによって構成することができる。
一方、画像解析装置200は、撮影装置100によって収録されたフレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを越えて一方の領域から他方の領域に移動した移動体の数を示す計数値を求める処理を行う構成要素であり、図に一点鎖線で囲って示すとおり、検出ライン設定部211、ブロック設定部212、探索領域設定部213、入力画像格納部220、着目単位画像抽出部230、最類似単位画像決定部240、変位ベクトル定義部250、法線ベクトル定義部260、ベクトル長集計部270、計数値算出部280によって構成されている。
また、ディスプレイ装置300は、オペレータに対して、入力画像格納部220に格納されているフレーム画像を提示したり、計数値算出部280で算出された計数値を提示したりするための構成要素である。移動体を計数する処理を行う上では、このディスプレイ装置300は必ずしも必要な構成要素ではないが、後述するように、検出ライン設定部211による検出ラインLの設定処理をオペレータの描画操作に基づいて行う場合や、計数値算出部280で算出された計数値をオペレータに提示する場合には、ディスプレイ装置300を設けるのが好ましい。
なお、ここでは発明の基本概念を説明する便宜上、画像解析装置200を機能ブロックの集合体として示しているが、実際には、この画像解析装置200は、汎用のコンピュータに専用のプログラムを組み込むことにより構成することができ、ディスプレイ装置300としては、当該コンピュータ用のディスプレイをそのまま利用することができる。
もちろん、汎用のコンピュータとしては、デスクトップパソコンやノートパソコンの他、タブレット型電子端末やスマートフォンを用いることも可能である。前述したように、本発明に係る計数システムでは、構成が簡素化されるため、タブレット型電子端末やスマートフォンなどの比較的処理能力の低いコンピュータを利用して画像解析装置200を構成した場合でも、プログラムの処理手順が簡素化されるため、十分に高速な処理が可能になる。
また、最近のタブレット型電子端末やスマートフォンなどでは、ディスプレイとともに動画撮影機能をもったデジタルカメラを内蔵している機器が一般化しつつあるので、そのような機器を利用して図5に示す計数システムを構成した場合、当該機器に内蔵されたデジタルカメラを撮影装置100として利用し、当該機器に内蔵されたディスプレイをディスプレイ装置300として利用することが可能である。このため、図5に示す計数システム全体を、汎用のタブレット型電子端末やスマートフォンに専用のアプリケーションプログラムを組み込むことによって構成することが可能になる。
あるいは、図5に示す画像解析装置200を、半導体集積回路によって構成することもできる。すなわち、図5において一点鎖線で囲われた個々のブロックとして示されている構成要素を、それぞれ半導体回路として用意すれば、画像解析装置200全体を半導体集積回路によって構成することができる。そうすれば、たとえば、当該半導体集積回路をデジタルカメラの筐体内に組み込むことも可能になる。別言すれば、図5に示す画像解析装置200を撮影装置100の筐体内に組み込むことができ、撮影装置100の筐体を定点に設置するだけで、移動体の計数を行うことができるようになる。
続いて、この画像解析装置200の個々の構成要素(図5に個々のブロックで示す要素)の具体的な処理機能を順に説明する。
<2−2. 入力画像格納部>
入力画像格納部220は、所定の計数対象期間に渡って撮影装置100が撮影したフレーム画像を時系列に沿って順次入力し、これを格納する役割を果たす構成要素であり、実際には、ハードディスクやメモリなどの記憶装置によって構成される。図では、撮影装置100によって撮影されたフレーム画像を符号F(i)で示すことにする。ここで、符号「i」は、フレームの番号を示すパラメータであり、フレーム画像F(i)は、入力画像格納部220が入力した第i番目のフレーム画像ということになる。なお、フレーム番号を特定せずに、任意のフレーム画像を一般的に指す場合には、単に「フレーム画像F」と呼ぶことにする。
入力画像格納部220は、所定の計数対象期間に渡って撮影装置100が撮影したフレーム画像を時系列に沿って順次入力し、これを格納する役割を果たす構成要素であり、実際には、ハードディスクやメモリなどの記憶装置によって構成される。図では、撮影装置100によって撮影されたフレーム画像を符号F(i)で示すことにする。ここで、符号「i」は、フレームの番号を示すパラメータであり、フレーム画像F(i)は、入力画像格納部220が入力した第i番目のフレーム画像ということになる。なお、フレーム番号を特定せずに、任意のフレーム画像を一般的に指す場合には、単に「フレーム画像F」と呼ぶことにする。
ここでは、計数対象期間内に全mフレーム分の画像が入力されたものとする。したがって、入力画像格納部220には、この計数対象期間に渡って撮影装置100が撮影したフレーム画像が時系列に沿って、第1番目のフレーム画像F(1)から第m番目のフレーム画像F(m)に至るまで順次入力されることになる。入力画像格納部220は、こうして入力したフレーム画像をすべて格納しておいてもよいし、後述する着目単位画像抽出処理や最類似単位画像決定処理が完了したフレーム画像から逐次消去してゆくようにしてもかまわない。
撮影装置100が、たとえば、30フレーム/秒のレートで動画撮影を行うデジタルカメラであり、計数対象期間を1時間に設定した場合、全フレーム数mは、m=30フレーム×3600秒ということになる。もちろん、入力画像格納部220は、撮影装置100から与えられるフレーム画像を間引きして入力することもできる。たとえば、上例の場合、1/30に間引きして、1フレーム/秒のレートでフレーム画像を入力すれば、全フレーム数mは、m=1フレーム×3600秒ということになる。ただ、フレーム画像を間引きすると、後の処理で正確な変位ベクトルを定義することができなくなる可能性があるので、実用上は、撮影装置100が撮影したフレームレートでそのまま全フレーム画像を入力するのが好ましい。
<2−3. 3つの要素の設定部>
こうして、入力画像格納部220内に合計m枚のフレーム画像F(1)〜F(m)が取り込まれると、これらのフレーム画像を解析することにより、§1で述べた縄暖簾のモデルにおける縄Rの変位を示す変位ベクトルが求められる。ただ、そのためには、検出ラインL,ブロックB(j),探索領域A(j)という3つの要素を設定する必要がある。ここで、符号「j」は、検出ラインL上の位置を示すパラメータであり、ブロックB(j)は、検出ラインL上に設定された第j番目のブロックであり、探索領域A(j)は、このブロックB(j)に対応して設定された探索領域ということになる。図5に示す検出ライン設定部211,ブロック設定部212,探索領域設定部213は、上記3つの要素を設定するための構成要素である。
こうして、入力画像格納部220内に合計m枚のフレーム画像F(1)〜F(m)が取り込まれると、これらのフレーム画像を解析することにより、§1で述べた縄暖簾のモデルにおける縄Rの変位を示す変位ベクトルが求められる。ただ、そのためには、検出ラインL,ブロックB(j),探索領域A(j)という3つの要素を設定する必要がある。ここで、符号「j」は、検出ラインL上の位置を示すパラメータであり、ブロックB(j)は、検出ラインL上に設定された第j番目のブロックであり、探索領域A(j)は、このブロックB(j)に対応して設定された探索領域ということになる。図5に示す検出ライン設定部211,ブロック設定部212,探索領域設定部213は、上記3つの要素を設定するための構成要素である。
検出ライン設定部211は、フレーム画像F上に検出ラインLを設定する機能を果たす構成要素であり、ここに示す実施形態の場合、オペレータの描画操作に基づいて、検出ラインLの設定を行う機能を有している。図6は、この検出ライン設定部211による検出ラインLの設定処理画面を示す平面図である。図示の設定処理画面は、図1に例示した校門近傍のフレーム画像F上で、検出ラインLの設定作業を行っている状態を示すものである。
図5に示すシステムの場合、入力画像格納部220は、格納中のフレーム画像の中の任意の画像をディスプレイ装置300の画面上に表示させる機能を有している。そこで、ここに示す実施形態の場合、検出ライン設定部211が検出ラインの設定処理を行う際に、入力画像格納部220に対して指示を与え、任意のフレーム画像Fをディスプレイ装置300の画面に静止画像として表示させるようにする。検出ライン設定部211は、その状態で、オペレータからの描画操作を受け付け、表示中のフレーム画像F上に検出ラインLを設定する。
たとえば、図6には、フレーム画像F上に太線で示すように直線状の検出ラインLが設定された例が示されている。この太線で示す検出ラインLは、図1に破線で示す検出ラインLに対応するものであり、当該検出ラインLを横切って移動する移動体が方向別に計数されることになる。オペレータは、ディスプレイ装置300の画面上に表示されているフレーム画像Fを見ながら、計数を行うのに適切な位置に、検出ラインLを設定する描画操作を行えばよい。
具体的には、図示の例の場合、たとえば、白丸で示す2つの指定点L1,L2をマウスなどのポインティングデバイスで指定する操作を行うことにより、検出ラインLを設定することができる。この場合、検出ライン設定部211は、マウスなどのポインティングデバイスと、当該デバイスを利用して検出ラインLを設定するプログラムによって実現できる。
もちろん、点L1から点L2までのドラッグ操作により検出ラインLを設定するようにしてもよいし、キーボード操作などにより検出ラインLを設定するようにしてもよい。また、検出ラインLは必ずしも直線である必要はなく、円弧や任意の曲線(たとえば、ベジェ曲線等)によって構成してもよい。要するに、オペレータがディスプレイ画面上に表示されたフレーム画像F上に重ねて、任意の直線や曲線からなる検出ラインLを描く描画操作を行い、当該描画操作に基づいて検出ラインLの設定が行われるようにすればよい。
この実例の場合、移動体は歩行中の人物であるため、必ず2本のゲート支柱G1,G2の間を通ってこのゲートを出入りすることになる。したがって、本来は、指定点L2の代わりに、黒丸で示す指定点L3を指定し、2つの指定点L1,L3の間に検出ラインLを設定すべきであるが、実用上は、図示の例のように、指定点L3ではなく指定点L2を指定しても問題はない。もっとも、2点L2,L3間には塀Wがあり、歩行中の人物が移動することはないので、後述するように、設定した検出ラインLのうち、2点L2,L3間の部分は無駄な部分になる。
前述したとおり、撮影装置100は、所定の撮影対象範囲を定点から同一視野で撮影して動画を収録する働きをするので、入力画像格納部220に取り込まれるm枚のフレーム画像F(1)〜F(m)に含まれる背景の構図は、いずれも同じになる。したがって、この検出ライン設定処理を行う際にディスプレイ装置300に表示させるフレーム画像は、m枚のフレーム画像F(1)〜F(m)のいずれでもかまわない。実用上は、たとえば、第1番目のフレーム画像F(1)を静止画像として表示させた状態で、検出ラインLの設定処理を行うようにすればよい。
もちろん、フレーム画像F上のどの位置に検出ラインLを設定するかは、オペレータの自由意志に基づいて決められる事項であるので、図6に示すように、校門近傍のフレーム画像Fが表示されている状態において、必ずしも2本のゲート支柱G1,G2間に検出ラインLを設定する必要はない。たとえば、校門前の道路を横断するように検出ラインLを設定すれば、校門を出入りする人数を計数する代わりに、道路を往来する人数を計数することができる。
また、検出ライン設定部211は、必ずしもオペレータの描画操作に基づいて検出ラインLを設定する必要はなく、常に定位置に検出ラインLを自動設定するようにしてもかまわない。たとえば、撮影装置100が、図6に示すような校門近傍のフレーム画像Fを常に撮影できるような状態で常設され、この計数システムを、図示の校門を出入りする人数の計数のみに特化したシステムとして利用するのであれば、検出ラインLは常に図6に示す位置に設定すればよい。このような場合は、検出ライン設定部211に、常に、図6に示す検出ラインLを自動設定する機能をもたせておけば足り、毎回、オペレータによる描画操作を行う必要はない。
図7は、図6に示す検出ラインLによって区分けされた2つの領域A1,A2と、両者間の移動方向D1,D2を示す平面図である。検出ライン設定部211によって、図6に示すような検出ラインLの設定が行われた場合、当該設定情報は、フレーム画像F上に定義された二次元XY座標系上の座標情報として検出ライン設定部211内に格納される。図示の例の場合、2つの指定点L1,L2の座標値を示す情報と、これら2点を結ぶ線分が検出ラインLとして設定されたことを示す情報が、検出ライン設定部211内に格納される。
図6に示す実例の場合、歩行中の人物(移動体)は、2本のゲート支柱G1,G2の間を通ってのみゲートを行き来できる。したがって、この実例では、図7に示すとおり、実線で描かれた検出ラインLの両端を破線で示すように延長し、フレーム画像Fを第1の領域A1と第2の領域A2とに分けたときに、これら2つの領域間を行き来する移動体の数を計数する処理が行われることになる。もっとも、実際には、点L2,L3間には塀Wが設けられているため、移動体の動きは、点L1,L3間の区間においてのみ生じることになる。
画像解析装置200による解析処理は、m枚のフレーム画像F(1)〜F(m)を解析することにより、所定の計数対象期間内に、所定の検出ラインLを境界として区分けされた第1の領域A1から第2の領域A2へ向かう第1方向D1に移動した移動体の数を示す第1計数値C1と、第2の領域A2から第1の領域A1へ向かう第2方向D2に移動した移動体の数を示す第2計数値C2と、を求めるための処理ということになる。もちろん、計数値C1,C2は、必ずしも両方ともに求める必要はなく、一方のみを求めるようにしてもかまわない。
このように、検出ラインLは、2つの領域A1,A2を定義するための重要な情報であり、同じm枚のフレーム画像F(1)〜F(m)を用いた解析を行ったとしても、この検出ラインLの設定が変われば、最終的に得られる計数値C1,C2の値も変わってくる。図7に示す検出ラインLは、図6に示すフレーム画像Fを解析対象画像とする前提で設定されたラインであり、このような設定で得られる計数値C1,C2は、校門を出入りした人数としての意味をもつ。なお、実用上は、検出ライン設定部211に、設定中の検出ラインLをディスプレイ装置300によって表示されているフレーム画像Fに重ねて表示させる機能をもたせておき(図6の例では、検出ラインLは太線で重量表示されている)、どの位置に検出ラインLが設定されているかを明示するのが好ましい。
ブロック設定部212は、こうして設定された検出ラインLに沿って、複数n個のブロックB(j)を設定する機能を果たす(j=1〜n)。ここで、符号「j」は、前述したとおり、検出ラインL上の位置を示すパラメータであり、ブロックB(j)は、検出ラインL上に設定された第j番目のブロックを示す。このn個のブロックB(j)は、§1で述べた縄暖簾の仮想モデルにおける個々の縄Rの下端に相当するものであり、各ブロック内の微小画像(着目単位画像)の変位を検出することにより、移動体の計数が行われる。
図8は、ブロック設定部212によって設定されたn個のブロックB(1)〜B(n)を示す平面図である。図7では、図6に示すフレーム画像Fの内容に関連させ、校門の配置に応じて斜め方向に検出ラインLを設定した例を示したが、図8以降では、便宜上、フレーム画像Fの中央に破線として示す水平な検出ラインLを設定した例について説明を行うことにする。図8に正方形で示す検出ラインL上の各ブロックB(1)〜B(n)は、図4に示す縄暖簾の仮想モデルにおいて円で示す個々の縄Rに対応することになる。
検出ライン設定部211が、図8に示すような検出ラインLを設定すると、ブロック設定部212は、この検出ラインL上に所定間隔でn個の検出基準点E(1)〜E(j)〜E(n)を設定し、更に、個々の検出基準点E(j)についてブロックB(1)〜B(j)〜B(n)を設定する。図示の例の場合、個々の検出基準点E(j)は等間隔のピッチpで配置されており、各検出基準点E(j)を中心とする一辺がpの正方形からなるブロックB(j)が設定されている。
なお、図8では、図示の便宜上、n=10として、検出ラインL上に、比較的大きな正方形状のブロックB(j)を10個設定した例(j=1〜10)を示すが、実際には、1つのブロックB(j)の大きさは、たとえば、10画素×10画素程度あれば十分である。したがって、図8では、これらブロックB(j)の集合体により検出ラインL上に幅の広い帯が形成されているように見えるが、実際には、フレーム画像Fのサイズに比べて、個々のブロックB(j)のサイズはかなり小さく、肉眼で観察した場合、n個のブロックB(j)の集合体は、検出ラインL上の太線として把握できる程度になる。もちろん、ブロックの総数nも、実際にはn=10といった小さな数ではなく、たとえば、n=100のような大きな数になる。ただ、ここでは図示の便宜上、図8に示すように、比較的大きなサイズのブロックB(j)が設定された例について説明を行う。
こうして、ブロック設定部212によって、複数n個のブロックB(j)の設定が行われると(j=1〜n)、続いて、探索領域設定部213によって、これらn個のブロックB(j)について、それぞれ当該ブロックおよびその周辺領域を包含する探索領域A(j)が設定される。図9は、図8に示すn個のブロックB(j)に基づいて設定された、n個の探索領域A(j)の一部を示す平面図である。ここでは、図示の便宜上、第j番目のブロックB(j)について設定された探索領域A(j)および第n番目のブロックB(n)について設定された探索領域A(n)のみが一点鎖線で示されているが、実際には、n個のブロックのそれぞれについて、同様の方法で探索領域が設定される。こうして設定された探索領域A(j)は、図4に示す縄暖簾の仮想モデルでは、個々の縄Rの変位可能範囲というべき領域になる。
探索領域A(j)は、対応するブロックB(j)およびその周辺領域を包含する領域であれば、どのような方法で設定してもかまわないが、実用上は、ブロック設定部212によって、縦にa個、横にb個の画素が並んだ画素配列を含む矩形状のブロックB(j)を設定するようにし(たとえば、a=b=10とすれば、10画素×10画素の正方形状のブロックが設定される)、当該画素配列およびその上方、下方、左方、右方にそれぞれ配置された周辺画素配列を包含する矩形状の探索領域A(j)を設定するのが好ましい。このように、ブロックB(j)および探索領域A(j)をともに矩形状の領域としておけば、最類似単位画像決定部240における最類似単位画像の探索処理が簡素化される。
後述するように、探索領域A(j)は、ブロックB(j)内の着目単位画像に類似する単位画像を探索するための領域であるので、そのような類似単位画像を発見するのに合理的な広さをもった領域に設定するのが好ましい。別言すれば、あるフレーム画像F(i−1)において、ブロックB(j)内に位置していた移動体の特定部分が、次のフレーム画像F(i)において、探索領域A(j)内のどこかに位置する状態となっているように、最小限の広さをもった探索領域A(j)を設定するのが理想である。探索領域A(j)が狭すぎると、その中に類似単位画像を発見することができなくなり、探索領域A(j)が広すぎると、類似単位画像を探索する処理に時間を要することになる。
実際には、計数対象となる移動体の移動速度や、入力画像格納部220に取り込まれる動画のフレームレート(単位時間あたりのフレーム画像数)を考慮して、適切な広さの探索領域を設定すればよい。移動体の移動速度が速ければ速いほど、より広い探索領域を設定しておく必要があり、取り込まれる動画のフレームレートが大きければ大きいほど、より狭い探索領域を設定しておけば十分である。
<2−4. 着目単位画像抽出部と最類似単位画像決定部>
さて、こうして、検出ラインL,n個のブロックB(j),n個の探索領域A(j)という3つの要素(j=1〜n)が設定されたら、着目単位画像抽出部230および最類似単位画像決定部240による処理が実行される。
さて、こうして、検出ラインL,n個のブロックB(j),n個の探索領域A(j)という3つの要素(j=1〜n)が設定されたら、着目単位画像抽出部230および最類似単位画像決定部240による処理が実行される。
まず、着目単位画像抽出部230は、所定の着目時点におけるフレーム画像Fから個々のブロック内の画像をそれぞれ着目単位画像として抽出する処理を、上記着目時点を次々と変化させながら繰り返し行う構成要素である。ここでは、説明の便宜上、フレームの番号を示すパラメータが「i−1」の時点を着目時点とする例を述べることにする。この場合、着目単位画像抽出部230は、入力画像格納部220に格納されている第(i−1)番目のフレーム画像F(i−1)から、個々のブロック内の画像をそれぞれ着目単位画像として抽出する処理を行うことになる。
図8に示すように、検出ラインL上にn個のブロックB(j)が設定されている場合(但し、j=1〜n)、着目単位画像抽出部230が行う処理は、第(i−1)番目のフレーム画像F(i−1)から、第j番目のブロックB(j)内の画像を着目単位画像P(i−1,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う処理ということになる。
具体的には、まず、パラメータをi=2,j=1に定めて、第1番目のフレーム画像F(1)から第1番目のブロックB(1)内の画像を着目単位画像P(1,1)として抽出し、次に、パラメータをi=2,j=2に定めて、第1番目のフレーム画像F(1)から第2番目のブロックB(2)内の画像を着目単位画像P(1,2)として抽出し、... 、パラメータをi=2,j=nに定めて、第1番目のフレーム画像F(1)から第n番目のブロックB(n)内の画像を着目単位画像P(1,n)として抽出する処理を行う。これで第1番目のフレーム画像F(1)からの抽出処理は完了である。同様の処理を、第2番目のフレーム画像F(1)〜第m番目のフレーム画像F(m)についても同様に行うことになる。別言すれば、空間軸のパラメータjを1〜nと順次変化させるとともに、時間軸のパラメータiを2〜mと順次変化させながら、着目単位画像P(i−1,j)の抽出を行うことになる。
一方、最類似単位画像決定部240は、着目時点の前もしくは後の参照時点におけるフレーム画像に対して、個々のブロックについて設定された探索領域内を探索し、それぞれ対応するブロックについて抽出された着目単位画像に最も類似する同サイズの画像を最類似単位画像と決定する処理を、上記着目時点を次々と変化させながら繰り返し行う構成要素である。ここでは、前述したとおり、フレームの番号を示すパラメータが「i−1」の時点を着目時点としたので、参照時点としては、この着目時点から1時点だけ後、すなわち、パラメータが「i」の時点を参照時点とする例を述べることにする。
この場合、最類似単位画像決定部240は、第i番目のフレーム画像F(i)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i−1,j)に最も類似する同サイズの画像を最類似単位画像Q(i,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行うことになる。この処理は、§1で述べた縄暖簾の仮想モデルとの関係では、いわば、着目時点でのフレーム画像F(i−1)において検出ラインL上に位置していた縄Rが、1時点だけ後の参照時点でのフレーム画像F(i)上ではどこに移動しているかを認識するために、縄Rの下端面の微小画像(着目単位画像)に最も類似している同サイズの微小画像(最類似単位画像)を探索する処理に相当するものである。
図10は、この最類似単位画像決定部240の処理を説明する平面図である。上段の図10(a) は着目時点t(i−1)におけるフレーム画像F(i−1)を示し、下段の図10(b) は参照時点t(i)におけるフレーム画像F(i)を示している。
図10(a) には、フレーム画像F(i−1)上での第j番目のブロックB(j)が描かれており、着目単位画像抽出部230によって、このブロックB(j)内の画像(図には斜線ハッチングを施して示す)が着目単位画像P(i−1,j)として抽出されることになる。図5に示すとおり、ブロック設定部212から着目単位画像抽出部230に対して、設定したブロックB(j)に関する情報(フレーム画像F上での位置座標)が与えられるので、着目単位画像抽出部230は当該情報に基づいて、入力画像格納部220に格納されているフレーム画像F(i−1)から着目単位画像P(i−1,j)の抽出を行うことができる。こうして抽出された着目単位画像P(i−1,j)は、着目単位画像抽出部230から最類似単位画像決定部240に与えられる。
一方、図10(b) には、フレーム画像F(i)上での第j番目のブロックB(j)が描かれている。ブロックB(j)は、常に、検出ラインL上の固定ブロックとして設定されるので、いずれの時点のフレーム画像F上でもその位置は同じである。ただ、フレーム画像Fの内容は時間の経過とともに変化してゆく。図10は、ちょうどブロックB(j)の位置に移動体が位置していた例を示しているため、図10(a) に斜線ハッチングを施して示したブロックB(j)内の画像(すなわち、着目単位画像P(i−1,j))と、図10(b) にドットハッチングを施して示したブロックB(j)内の画像(すなわち、着目単位画像P(i,j))とは異なった画像になる。
最類似単位画像決定部240が行う処理は、図10(b) に示されている第i番目のフレーム画像F(i)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、図10(a) に示されている着目単位画像P(i−1,j)に最も類似する同サイズの画像を最類似単位画像Q(i,j)と決定する処理である。図5に示すとおり、探索領域設定部213から最類似単位画像決定部240に対しては、設定した探索領域A(j)に関する情報(フレーム画像F上での位置座標)が与えられ、着目単位画像抽出部230から最類似単位画像決定部240に対しては、抽出した着目単位画像P(i−1,j)の情報が与えられるので、最類似単位画像決定部240は、これらの情報に基づいて、入力画像格納部220に格納されているフレーム画像F(i)の探索領域A(j)内を探索し、最類似単位画像Q(i,j)を決定することができる。
図示の例では、ブロックB(j)の右上位置に、こうして得られた最類似単位画像Q(i,j)が斜線ハッチングを施して示されている。図10(b) に示す最類似単位画像Q(i,j)は、一点鎖線で示す探索領域A(j)内に関する限り、図10(a) に示す着目単位画像P(i−1,j)に最も類似した画像ということになる。これは、着目時点t(i−1)から参照時点t(i)に至るまでの間に、ブロックB(j)近傍の移動体が右上方向に移動していた可能性が高いことを示すものである。
なお、図10(b) にドットハッチングを施して示したブロックB(j)内の画像は、時点t(i)を着目時点として、着目単位画像抽出部230によって着目単位画像P(i,j)として抽出され、その次の時点t(i+1)において撮影されたフレーム画像F(i+1)の探索領域A(j)内の単位画像(ブロックB(j)と同じサイズの画像)と類似比較されることになる。こうして、同様の処理が、j=1〜nについて、かつ、i=2〜mについて繰り返し実行される。
<2−5. 変位ベクトル定義部と法線ベクトル定義部>
図5に示す変位ベクトル定義部250は、着目単位画像抽出部230によって抽出された個々の着目単位画像と、これらに対応して最類似単位画像決定部240によって決定された個々の最類似単位画像と、について、時系列に沿って一方から他方に向かう変位ベクトルをそれぞれ定義する処理を行う。
図5に示す変位ベクトル定義部250は、着目単位画像抽出部230によって抽出された個々の着目単位画像と、これらに対応して最類似単位画像決定部240によって決定された個々の最類似単位画像と、について、時系列に沿って一方から他方に向かう変位ベクトルをそれぞれ定義する処理を行う。
具体的には、上述した実施形態の場合、図11に示すように、着目単位画像P(i−1,j)の位置(実際には、図10(a) に示すフレーム画像F(i−1)上の位置)から、最類似単位画像Q(i,j)の位置(実際には、図10(b) に示すフレーム画像F(i)上の位置)へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義すればよい。
図8に示すように、検出ラインL上に所定間隔で配置された各検出基準点E(j)を中心として各ブロックB(j)を設定した場合、変位ベクトル定義部250は、各検出基準点E(j)から各最類似単位画像Q(i,j)の中心点H(i,j)に向かうベクトルを変位ベクトルV(i,j)と定義すればよい。図示の例では、正方形のブロックB(j)を設定しているため、着目単位画像P(i−1,j)も最類似単位画像Q(i,j)も正方形の画像になる。したがって、図11に示す例では、正方形からなる着目単位画像P(i−1,j)の中心に位置する検出基準点E(j)から、同サイズの正方形からなる最類似単位画像Q(i,j)の中心点H(i,j)に向かうベクトルを変位ベクトルV(i,j)と定義している。
もっとも、変位ベクトルV(i,j)は、必ずしも着目単位画像P(i−1,j)と最類似単位画像Q(i,j)との中心点同士を結ぶベクトルとして定義する必要はない。たとえば、輪郭を構成する正方形の1頂点同士を結ぶベクトルとして定義するようにしてもかまわない。ただ、移動体の変位方向を良好な精度をもって示すには、図示の例のように、中心点同士を結ぶベクトルとして変位ベクトルV(i,j)を定義するのが好ましい。
図11には、第j番目の検出基準点E(j)の位置に設定されたブロックB(j)内の画像として抽出された着目単位画像P(i−1,j)とこれに対応する最類似単位画像Q(i,j)との間に定義される変位ベクトルV(i,j)のみを例示したが、実際には、n個のブロックB(1)〜B(n)内の画像として抽出されたn個の着目単位画像P(i−1,1)〜P(i−1,n)についても同様に最類似単位画像Q(i,1)〜Q(i,n)を決定する処理が行われ、それぞれ変位ベクトルV(i,1)〜V(i,n)が定義されることになる。
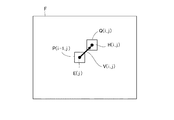
図12は、図8に示す個々の検出基準点E(j)について、それぞれ変位ベクトルV(i,j)を定義した状態(j=1〜n)を示す平面図である。図11に示す例のように、着目単位画像P(i−1,j)の中心点である検出基準点E(j)から、最類似単位画像Q(i,j)の中心点H(i,j)へ向かうベクトルとして変位ベクトルV(i,j)を定義すると、すべての変位ベクトルの始点は検出ラインL上に揃うことになる。したがって、図12に示す例においても、各変位ベクトルは、いずれも検出ラインL上に始点をもったベクトルになっている。
この例では、たとえば、検出基準点E(j−1),E(j),E(j+1)については、それぞれ図の上方を向いた変位ベクトルV(i,j−1),V(i,j),V(i,j+1)が定義されている。これは、検出基準点E(j−1),E(j),E(j+1)の位置において、移動体が斜め右上方に移動する流れが生じたことを示している。一方、検出基準点E(n−1),E(n)については、それぞれ図の下方を向いた変位ベクトルV(i,n−1),V(i,n)が定義されている。これは、検出基準点E(n−1),E(n)の位置において、移動体が斜め左下方に移動する流れが生じたことを示している。
なお、図12に示す例では、検出基準点E(1)など、変位ベクトルが描かれていない点がいくつか存在するが、これらの点は、変位ベクトルが定義されていない点である。変位ベクトル定義部250によって変位ベクトルの定義が行われないケースとしては、次の2通りが考えられる。
第1のケースは、着目単位画像P(i−1,j)の位置と最類似単位画像Q(i,j)の位置とが完全に一致する場合である。これは、ブロックB(j)内の画像に時間的変化が全くなかった場合に生じるケースである。たとえば、図6に示す例の場合、この時点では、検出ラインLの近傍に移動体は存在しないので、検出ラインLの近傍画像には時間的な変化は生じていない。このような場合、図10(a) に示すブロックB(j)内の画像(着目単位画像P(i−1,j))に時間的な変化は生じないので、図10(b) に示すように、次のフレーム画像F(i)の探索領域A(j)内を探索して、着目単位画像P(i−1,j)に最も類似した単位画像を探す処理を行うと、同じブロックB(j)内の着目単位画像P(i,j)自身が最類似単位画像Q(i,j)として決定されることになる。この場合、着目単位画像P(i−1,j)は変位していないことになるので、変位ベクトルの定義は行われない。
別言すれば、検出ラインL上の特定の位置を特定の時間帯に移動体が通過したときに、当該特定の時間帯の当該特定の位置に関して、変位ベクトルの定義が行われるのであり、そのような変化が生じない限り、変位ベクトルは定義されないことになる。したがって、図12の検出基準点E(1)など、変位ベクトルが定義されていない点は、当該点の近傍にはその時点において移動体が存在しなかったことを示すことになる。
変位ベクトルの定義が行われない第2のケースは、§3−1で詳述するように、探索領域A(j)内を探索しても、着目単位画像P(i−1,j)に類似する単位画像が全く発見できなかった場合である。たとえば、移動体の速度が速すぎて、フレーム画像F(i−1)上では、ブロックB(j)の位置にあった移動体が、次のフレーム画像F(i)上では、探索領域A(j)の外へ去ってしまっていたような想定外の事態が生じた場合、最類似単位画像決定部240は最類似単位画像Q(i,j)を決定することができなくなり、変位ベクトル定義部250は変位ベクトルを定義することができない。
あるいは、何らかの事情で、フレーム画像上にノイズ成分が混入し、このノイズ成分の影響により、本来は類似している単位画像が非類似の画像と判断されたような場合も、類似する単位画像が全く発見できないケースになる。たとえば、図10(b) に示す例では、元の着目単位画像P(i−1,j)が右上に移動して単位画像Q(i,j)の位置まできたという前提で、単位画像Q(i,j)が最類似単位画像とされている。ところが、もし撮影装置100のレンズに虫がとまったとか、砂埃が舞い上がったといった現象により、単位画像Q(i,j)が本来の画像とは異なるものになってしまっていた場合、単位画像Q(i,j)は類似画像とは判断されず、やはり類似する単位画像が全く発見できないことになる。
上述した第1のケースでは、そもそも移動体の動きがなかったのであるから、変位ベクトルが定義されなくても何ら問題は生じない。これに対して、上述した第2のケースは、本来は何らかの変位ベクトルが定義されるべきであるのに、何らかの予期せぬ要因により定義に失敗したケースということになり、最終的に得られる計数値に誤差を生じさせる原因になる。ただ、この第2のケースはイレギュラーな要因に基づいて生じるケースなので、実用上、大きな問題にはならない。
図5に示す法線ベクトル定義部260は、変位ベクトル定義部250によって定義された個々の変位ベクトルV(i,j)について、検出ライン設定部211が設定した検出ラインLに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する構成要素である。図13は、この法線ベクトル定義部260の処理を説明する平面図である。上例の場合、変位ベクトルV(i,j)の始点は、検出ラインL上の検出基準点E(j)であるので、法線ベクトル定義部260は、各変位ベクトルV(i,j)について、検出基準点E(j)の位置における検出ラインLに対する法線方向の成分を法線ベクトルN(i,j)と定義することになる。すなわち、図13に示すように、検出基準点E(j)における検出ラインLに対する法線をNとした場合に、変位ベクトルV(i,j)の法線N上への正射影投影像が法線ベクトルN(i,j)ということになる。
図14は、法線ベクトル定義部260が、図12に示す各変位ベクトルV(i,j)について、それぞれ法線ベクトルN(i,j)を定義した状態(j=1〜n)を示す平面図である。もちろん、変位ベクトルが定義されていない位置には、法線ベクトルも定義されない。
なお、§2−3で述べたように、図6に示す例では、白丸で示す2つの指定点L1,L2の間に検出ラインLを設定しているため、図7に太線で示す検出ラインLに沿って、n個の検出基準点E(1)〜E(n)が設定され、n個のブロックB(1)〜B(n)が設定される。ところが、2点L2,L3間には塀Wがあり、歩行中の人物が移動することはないので、2点L2,L3間に設定されたブロックについては、移動体による画像の変化がなく、どの時点においても、変位ベクトルや法線ベクトルは定義されないことになる。
別言すれば、2点L2,L3間に設定されたブロックから抽出された着目単位画像について最類似単位画像を探索する処理を行うと、上述した第1のケースに相当するため、結局、変位ベクトルは定義されないことになり、最類似単位画像の探索処理は無駄になる。したがって、演算処理の無駄を省く上では、オペレータは、移動体が通過する可能性のある領域にのみ(たとえば、図6に示す例では、2点L1,L3の区間にのみ)検出ラインLを設定すべきである。ただ、上記無駄な探索処理が行われたとしても、演算時間が極端に長くかかることはないので、実用上は、図6に示すように無駄な領域に検出ラインLを設定したとしても重大な支障は生じない。
<2−6. ベクトル長集計部と計数値算出部>
最後に、図5に示すベクトル長集計部270と計数値算出部280の処理機能を説明する。
最後に、図5に示すベクトル長集計部270と計数値算出部280の処理機能を説明する。
まず、ベクトル長集計部270は、法線ベクトル定義部260によって定義された各法線ベクトルN(i,j)のうち、計数対象となる一方の領域から他方の領域への移動を示す方向を向いたベクトルの長さを集計して集計値を求める処理を行う構成要素である。たとえば、図14に示す例の場合、検出ラインLの下方の領域から上方の領域への移動方向を計数対象とする場合は、図の上方を向いた法線ベクトルの長さを集計することになり、逆に、検出ラインLの上方の領域から下方の領域への移動方向を計数対象とする場合は、図の下方を向いた法線ベクトルの長さを集計することになる。
一般的な用途では、検出ラインLを境界として区分けされた第1の領域A1から第2の領域A2へ向かう第1方向D1に移動した移動体の計数値C1と、逆に第2の領域A2から第1の領域A1へ向かう第2方向D2に移動した移動体の計数値C2との双方が得られた方が好ましいので、以下、この2つの計数値C1,C2をそれぞれ取得する例を説明する。
この場合、ベクトル長集計部270は、法線ベクトル定義部260によって定義された各法線ベクトルN(i,j)のうち、第1方向D1(たとえば、図14における上方向)を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、第2方向D2(たとえば、図14における下方向)を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、を行うことになる(もちろん、用途によっては、いずれか一方の処理だけ行えばよい)。実際には、図14に例示するような各法線ベクトルN(i,j)が、パラメータiをi=2〜mに変化させて得られることになる。なお、ここでは、図10に示すように、第(i−1)番目のフレーム画像F(i−1)上の着目単位画像P(i−1,j)について、第i番目のフレーム画像F(i)上の探索領域A(j)を探索することにより、法線ベクトルN(i,j)が定義されることになるので、パラメータiの範囲はi=2〜mということになる。
結局、ベクトル長集計部270による集計処理は、時間軸のパラメータi(フレーム画像の番号を示すパラメータ)をi=2〜mの範囲で変え、空間軸のパラメータj(検出基準点の番号を示すパラメータ)をj=1〜nの範囲で変え、それぞれのバリエーションについて得られた法線ベクトルN(i,j)の長さを、第1方向D1を向いたベクトルについてのみ加算して第1方向集計値T1を求める処理と、第2方向D2を向いたベクトルについてのみ加算して第2方向集計値T2を求める処理ということになる。
図15は、このようなベクトル長集計部270による集計演算を示す図である。図示のとおり、第1方向集計値T1および第2方向集計値T2は、
T1 = Σi=2〜m Σj=1〜n d1(i,j) 式(1)
T2 = Σi=2〜m Σj=1〜n d2(i,j) 式(2)
で与えられる。ここで、d1(i,j)およびd2(i,j)は、法線ベクトルN(i,j)の向きに応じて、次のように定義される値である。
(a) 法線ベクトルN(i,j)が第1方向D1を向いていた場合
d1(i,j)は、法線ベクトルN(i,j)の長さ
d2(i,j)は、0
(b) 法線ベクトルN(i,j)が第2方向D2を向いていた場合
d1(i,j)は、0
d2(i,j)は、法線ベクトルN(i,j)の長さ
(c) 法線ベクトルN(i,j)が定義されていない場合
d1(i,j)は、0
d2(i,j)は、0
T1 = Σi=2〜m Σj=1〜n d1(i,j) 式(1)
T2 = Σi=2〜m Σj=1〜n d2(i,j) 式(2)
で与えられる。ここで、d1(i,j)およびd2(i,j)は、法線ベクトルN(i,j)の向きに応じて、次のように定義される値である。
(a) 法線ベクトルN(i,j)が第1方向D1を向いていた場合
d1(i,j)は、法線ベクトルN(i,j)の長さ
d2(i,j)は、0
(b) 法線ベクトルN(i,j)が第2方向D2を向いていた場合
d1(i,j)は、0
d2(i,j)は、法線ベクトルN(i,j)の長さ
(c) 法線ベクトルN(i,j)が定義されていない場合
d1(i,j)は、0
d2(i,j)は、0
たとえば、図14に示す例において、上方向を第1方向D1、下方向を第2方向D2とすれば、第1方向集計値T1を求める演算では、上方向を向いた法線ベクトルN(i,j−1),N(i,j),N(i,j+1)等については長さをそのまま加算し、下方向を向いた法線ベクトルN(i,n−1),N(i,n)等については加算せず(0を加算)といった集計処理が行われる。同様に、第2方向集計値T2を求める演算では、下方向を向いた法線ベクトルN(i,n−1),N(i,n)等については長さをそのまま加算し、上方向を向いた法線ベクトルN(i,j−1),N(i,j),N(i,j+1)等については加算せず(0を加算)といった集計処理が行われる。
計数値算出部280は、こうしてベクトル長集計部270によって集計された集計値に基づいて、最終的に出力すべき計数値を算出する処理を行う構成要素である。具体的には、計数値算出部280は、第1方向集計値T1に基づいて第1計数値C1を算出する処理と、第2方向集計値T2に基づいて第2計数値C2を算出する処理と、を実行する(もちろん、用途によっては、いずれか一方の処理だけ行えばよい)。
計数値算出部280によって集計された集計値T1,T2は、単なるベクトル長の集計値であり、任意の尺度をもった値であるのに対して、計数値算出部280によって算出され、外部(図5に示す例の場合は、ディスプレイ装置300の表示画面)に出力される計数値C1,C2は、この方向別計数システムによる最終計数結果を示す値である。
もっとも、前述したとおり、集計値T1,T2は、移動体の個数や量にほぼ比例した値になるので、相対的な計数値が得られれば十分であるような用途(たとえば、時間や曜日による交通量の増減を把握するような用途)に利用する場合には、計数値算出部280は、実質的に何ら演算処理を行わずに、ベクトル長集計部270から与えられた集計値T1,T2を、そのまま最終的な計数値C1,C2として出力してもかまわない。
一方、移動体の個数の絶対値を得る必要がある用途では、計数値算出部280において、ベクトル長集計部270から与えられた集計値T1,T2を個数の絶対値に変換するため、所定の係数を用いた補正処理が必要になる。そこで、図5に示す実施形態の場合、計数値算出部280が、オペレータから所定の係数Kを入力する機能を有し、ベクトル長集計部270が求めた集計値T1,T2を、入力された係数Kで除した値を移動体の数を示す計数値C1,C2として算出し、これをディスプレイ装置300に出力するようにしている。
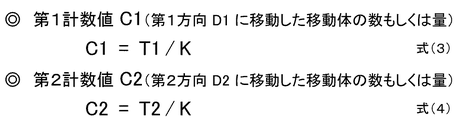
この場合、計数値算出部280は、図16に示すように、
C1 = T1/K 式(3)
C2 = T2/K 式(4)
なる除算によって、集計値T1,T2から計数値C1,C2を算出することになる。ここで、係数Kは、1移動体あたりの集計値であり、計数値C1は、第1方向D1に移動した移動体の数を示す値であり、計数値C2は、第2方向D2に移動した移動体の数を示す値である。もちろん、計数値C1,C2は、移動体の正確な数を示すものではなく、統計的な概算値というべきものであるが、現実社会で必要とされている用途の多くでは、このような統計的な概算値が得られれば十分である。
C1 = T1/K 式(3)
C2 = T2/K 式(4)
なる除算によって、集計値T1,T2から計数値C1,C2を算出することになる。ここで、係数Kは、1移動体あたりの集計値であり、計数値C1は、第1方向D1に移動した移動体の数を示す値であり、計数値C2は、第2方向D2に移動した移動体の数を示す値である。もちろん、計数値C1,C2は、移動体の正確な数を示すものではなく、統計的な概算値というべきものであるが、現実社会で必要とされている用途の多くでは、このような統計的な概算値が得られれば十分である。
なお、オペレータは、「1移動体あたりの集計値」としての係数K自身を直接入力する必要はなく、当該係数Kを決定することができる何らかの情報を計数値算出部280に入力すればよい。たとえば、ある特定のサンプル期間について、図5に示す計数システムを動作させた後、何らかの方法で計数した実測値(検出ラインLを越えて移動した移動体の数)を計数値算出部280に入力すれば、計数値算出部280は、入力された実測値に基づいて補正係数Kを自動的に算出することができるので、当該補正係数Kを用いて上述した式(3),(4)に基づく除算を行い、計数値C1,C2を算出することができる。
具体的には、図6に示す例のように、ある特定のサンプル期間について、撮影装置100によって校門近傍の動画を撮影し、これを画像解析装置200によって解析した結果、ベクトル長集計部270によって、たとえば、構内に入る方向についての集計値が8000なる結果が得られた場合を考えよう。このとき、オペレータが、当該サンプル期間について撮影された動画を見ながら、校門を入った人数を手作業で計数し、その結果、入った人数=80人との実測値が得られたとすれば、当該実測値を計数値算出部280に与えることにより、計数値算出部280は、集計値8000÷80人なる演算を行うことにより、補正係数Kの値(1移動体あたりの集計値)をK=100と決定することができる。
もちろん、校門を入る人数の実測値と校門を出る人数の実測値とを別個に取得し、校門を入る方向に関する補正係数K1と校門を出る方向に関する補正係数K2とを別個に求めるようにしてもよい。また、こうして求めた2つの補正係数K1,K2の平均値を、共通の補正係数Kとして利用するようにしてもよい。
<<< §3. 基本的実施形態の補足事項 >>>
§2では、図5のブロック図を参照しながら、本発明の基本的実施形態の構成および動作を説明した。ここでは、§2では説明できなかったいくつかの補足事項を述べることにする。
§2では、図5のブロック図を参照しながら、本発明の基本的実施形態の構成および動作を説明した。ここでは、§2では説明できなかったいくつかの補足事項を述べることにする。
<3−1. 最類似単位画像の決定方法>
前述した§2−4では、図5に示す最類似単位画像決定部240の動作として、図10(b) に示すフレーム画像F(i)上の探索領域A(j)内を探索して、図10(a) に示す着目単位画像P(i−1,j)に最も類似している単位画像(ブロックB(j)と同じサイズの画像)を探し出し、これを最類似単位画像Q(i,j)と決定する処理動作を説明した。ここでは、この最類似単位画像Q(i,j)を決定する具体的な処理方法の一例を述べる。
前述した§2−4では、図5に示す最類似単位画像決定部240の動作として、図10(b) に示すフレーム画像F(i)上の探索領域A(j)内を探索して、図10(a) に示す着目単位画像P(i−1,j)に最も類似している単位画像(ブロックB(j)と同じサイズの画像)を探し出し、これを最類似単位画像Q(i,j)と決定する処理動作を説明した。ここでは、この最類似単位画像Q(i,j)を決定する具体的な処理方法の一例を述べる。
図17は、着目単位画像P(i−1,j)と最類似単位画像Q(i,j)とのフレーム画像F上での相互位置関係を示す平面図である。実際には、着目単位画像P(i−1,j)は、着目時点t(i−1)において撮影された第(i−1)番目のフレーム画像F(i−1)上の単位画像であるのに対して、最類似単位画像Q(i,j)は、参照時点t(i)において撮影された第i番目のフレーム画像F(i)上の単位画像であるので、そもそも両者は同一のフレーム画像に存在する画像ではないが、図17では、両者の相互位置関係を示すため、同一のフレーム画像F上に両者を配置した状態を示している。
ここで、着目単位画像P(i−1,j)は、検出ラインL上の第j番目のブロックB(j)内に位置する画像であるのに対して、最類似単位画像Q(i,j)は、第i番目のフレーム画像F(i)の探索領域A(j)内を探索することにより、「ブロックB(j)と同じサイズの画像であり、かつ、着目単位画像P(i−1,j)に最も類似している画像」として求められた画像である。
このような最類似単位画像Q(i,j)の探索を行う意図は、第(i−1)番目のフレーム画像F(i−1)においてブロックB(j)内に位置していた移動体M(i−1)もしくはその一部分が、第i番目のフレーム画像F(i)上でどこに移動したかを認識することにある。図17には、説明の便宜上、ハート型の移動体が移動した様子が描かれている。すなわち、この例では、フレーム画像F(i−1)において検出ラインL上に位置していた移動体M(i−1)が、フレーム画像F(i)上では、移動体M(i)として示す位置まで移動している。最類似単位画像Q(i,j)が図示の位置に定義されているのは、移動体が斜め右上方向に移動したためである。
なお、図17の下段に示す例では、着目単位画像P(i−1,j)と最類似単位画像Q(i,j)とが全く同一の画像になっている。これは両者が、いずれも白地の背景画像上に配置され、同一のハート型の移動体の同一部分を抽出した画像になっているためである。ただ、実際には、両者が完全に同一の画像になることは稀である。これは、たとえ移動体の部分(ハート型の部分)の画像が完全同一であっても、通常、背景部分の画像は両者で異なり、また、実際の撮影環境では、照明状態が時間や場所に応じて異なるためである。更に、通常は、移動体も向きや形状を変えるため(たとえば、移動体が歩行者である場合には、当然ながら、姿勢や向きが時々刻々と変化する)、着目単位画像P(i−1,j)と最類似単位画像Q(i,j)とが完全に同一になることは稀である。
さて、最類似単位画像決定部240によって、最類似単位画像Q(i,j)を決定するには、基本的には、探索領域A(j)内に存在するすべての単位画像(ブロックB(j)と同サイズの画像)を候補として、それぞれ着目単位画像P(i−1,j)に対する類似度を定量的に評価し、類似度が最も大きな候補を最類似単位画像Q(i,j)に決定すればよい。
たとえば、ブロック設定部212が、縦にa個、横にb個の画素が並んだa×bのサイズの画素配列を含む矩形状のブロックB(j)を設定し(図8に示す例の場合は、a=bとして、正方形のブロックが設定されている)、探索領域設定部213が、当該a×bのサイズの画素配列およびその上方、下方、左方、右方にそれぞれ配置された周辺画素配列を包含する矩形状の探索領域A(j)を設定した場合、最類似単位画像決定部240は、縦にa個、横にb個の画素が並んだa×bのサイズの画素配列を収容可能な候補枠を、探索領域A(j)内の配置可能な各位置に配置し、各位置において当該候補枠内の画像を候補単位画像Uとして抽出し、抽出された候補単位画像Uのうち着目単位画像P(i−1,j)に最も類似する画像を最類似単位画像と決定すればよい。
図18は、最類似単位画像決定部240による最類似単位画像Q(i,j)の探索処理原理を示す平面図である。図の左側に示す着目単位画像P(i−1,j)は、着目単位画像抽出部230によって抽出された画像であり、図の右側に示す探索領域A(j)は、探索領域設定部213によって設定された領域である。最類似単位画像決定部240は、入力画像格納部220内に格納されているフレーム画像F(i)のうち、探索領域A(j)内を探索して、着目単位画像P(i−1,j)に最も類似する画像を探す処理を行うことになる。
そのために、着目単位画像P(i−1,j)と同サイズの画素配列を収容可能な候補枠(図18では正方形の太枠)を、探索領域A(j)内の配置可能な各位置に配置し、各位置において当該候補枠内の画像を候補単位画像U(i,j,k)として抽出する。ここで、変数kは、候補単位画像の番号を示すパラメータであり、候補単位画像U(i,j,k)は、最類似単位画像Q(i,j)の第k番目の候補ということになる。図18では、探索領域A(j)の左上隅に第1番目の候補単位画像U(i,j,1)を配置し、以下、横方向および縦方向に配置位置を1画素ずつずらしながら、探索領域A(j)内の配置可能なすべての位置に候補単位画像を配置している。
最類似単位画像決定部240は、こうして配置された個々の候補単位画像U(i,j,k)を着目単位画像P(i−1,j)と比較し、最も類似する画像を最類似単位画像Q(i,j)と決定すればよい。
図19は、最類似単位画像決定部240により最類似単位画像Q(i,j)を探索する際の具体的処理手順を示す図である。ここでは、一例として、ブロック設定部212が、a=b=10として、10行10列の画素配列を含むブロックを設定した場合を示してある。この場合、各単位画像は10行10列の画素配列から構成されることになるので、図19(a) に示すように、着目単位画像P(i−1,j)も候補単位画像U(i,j,k)も、10行10列の画素配列をもった画像になる。ここでは、着目単位画像P(i−1,j)の第h番目の画素をP(h)とし、候補単位画像U(i,j,k)の第h番目の画素をU(h)とする。また、単位画像内の総画素数をHとする(H=a×b:図示の例の場合、H=100)。
更に、ここでは、撮影装置100として、三原色R,G,B(赤色,緑色,青色)の各画素値Pr,Pg,Pbが定義された画素の集合体からなるフレーム画像Fを収録する機能をもった一般的なカラーデジタルカメラを用いたものとし、図19(b) に示すように、着目単位画像P(i−1,j)内の第h番目(但し、1≦h≦H,H=a×b)の画素P(h)の三原色R,G,Bの各画素値をPr(h),Pg(h),Pb(h)とし、候補単位画像U(i,j,k)内の第h番目の画素U(h)の三原色R,G,Bの各画素値をUr(h),Ug(h),Ub(h)とする。
上述したように、各候補単位画像U(i,j,k)の中から最類似単位画像Q(i,j)を決定するには、着目単位画像P(i−1,j)に対する類似度を定量的に評価すればよい。しかしながら、実用上は、類似度を定量的に定義するよりも、その逆の概念である相違度を定量的に定義した方が簡単である。そこで、ここで述べる実施例では、図19(c) に示す式(5)により、両単位画像の相違度ξを定義している。すなわち、各候補単位画像U(i,j,k)と着目単位画像P(i−1,j)との相違度ξは、
ξ = Σh=1〜H (|Pr(h)−Ur(h)|+
|Pg(h)−Ug(h)|+
|Pb(h)−Ub(h)|) 式(5)
なる式で定義される。
ξ = Σh=1〜H (|Pr(h)−Ur(h)|+
|Pg(h)−Ug(h)|+
|Pb(h)−Ub(h)|) 式(5)
なる式で定義される。
そして、図19(d) に示すように、相違度ξが最小となる候補単位画像U(i,j,k)を最類似単位画像Q(i,j)と決定すればよい。要するに、相違度ξが最小となる候補単位画像は、類似度が最高となる候補単位画像に相当するため、最類似単位画像決定部240は、相違度ξが最小となる候補を最類似単位画像Q(i,j)と決定することができる。
ただ、実用上は、図19(d) の下段に記載されているとおり、最類似単位画像決定部240は、相違度ξの最小値ξminが所定のしきい値ξthに対して、ξmin>ξthである場合には、「最類似単位画像なし」との決定を行うようにするのが好ましい。これは、全候補の中で相対的に相違度ξが最小である候補を選出したとしても、当該候補の絶対的な相違度がかなり高い場合には、当該候補は着目単位画像P(i−1,j)に「類似している」とは言えないためである。
具体的には、§2−5において第2のケースとして説明したイレギュラーなケースが発生した場合に、「最類似単位画像なし」との決定を行う必要が生じる。たとえば、図17に示す例において、ハート型の移動体の速度が速すぎた場合、フレーム画像F(i−1)上では、ブロックB(j)の位置にあった移動体が、次のフレーム画像F(i)上では、探索領域A(j)の外へ去ってしまっていたような想定外の事態が生じる。本来は、そのような事態が生じないように、探索領域A(j)をある程度広く設定しておくべきであるが、探索領域A(j)を広げれば広げるほど、探索処理の負担が増えるため、実用上は、探索領域A(j)は合理的なサイズに抑える必要がある。
図17に示す例において、移動体M(i)が探索領域A(j)の外側に位置したとすると、もはや探索領域A(j)内には、着目単位画像P(i−1,j)に類似した単位画像は存在しなくなる。それでも、個々の候補単位画像U(i,j,k)について、上述の式(5)に基づいて相違度ξを算出すれば、いわゆる「どんぐりの背比べ」というべき比較によって、一応、ξが最小となる候補を選出することができる。しかしながら、この場合、選出された候補は着目単位画像P(i−1,j)に類似した単位画像とは言えない。そこで、相違度ξに所定のしきい値ξthを設定しておき、最小値ξminをもつ候補が選出されたとしても、当該最小値ξminがしきい値ξthを上回るほど大きな値であった場合には、選出された候補単位画像を着目単位画像P(i−1,j)に類似した画像としては認めず、「最類似単位画像なし」との決定を行うようにする。
これは、撮影装置100のレンズに虫がとまったとか、砂埃が舞い上がったといった現象が生じた場合も同様である。要するに、ある基準以上の類似度(ある基準以下の相違度)を有している候補でなければ、最類似単位画像としては認めない運用を採ることになる。
こうして、最類似単位画像決定部240が、特定の着目単位画像P(i−1,j)について「最類似単位画像なし」との決定を行った場合、変位ベクトル定義部250は、当該特定の着目単位画像P(i−1,j)については変位ベクトルの定義を行わないことになり、法線ベクトル定義部260も、当該特定の着目単位画像P(i−1,j)については法線ベクトルの定義を行わないことになる。もちろん、ベクトル長集計部270は、定義が行われていない法線ベクトルについては長さの集計を行わないので、上述したイレギュラーな事象は、移動体の計数に何ら関与しないことになる。
なお、図17では、説明の便宜上、フレーム画像F内に、ブロックB(j)や探索領域A(j)がかなり大きく描かれているが、実際には、フレーム画像Fに対するブロックB(j)や探索領域A(j)のサイズはかなり小さなものである。前述したとおり、実用上、ブロックB(j)は、10×10画素程度の領域として設定すれば十分であり、探索領域A(j)も、たとえば、20×20画素、30×30画素といった程度の領域として設定すれば十分である。したがって、図2に示す例において、最類似単位画像決定部240は、検出ラインLに沿った細い帯状領域(すなわち、縄暖簾モデルにおける各縄Rの変位範囲)内についてのみ探索処理を行えば十分であり、個々の移動体M1〜M3を認識し、これを追跡する従来の方法に比べれば、本発明に係る方法の演算処理負担は極めて軽く、高速処理が可能になる。
<3−2. 法線ベクトルを定義する意義>
図5に示す計数システムでは、変位ベクトル定義部250により定義された変位ベクトルV(i,j)に基づいて、法線ベクトル定義部260において法線ベクトルN(i,j)を定義し、ベクトル長集計部270において、変位ベクトルV(i,j)の長さではなく、法線ベクトルN(i,j)の長さを集計している。ここでは、長さの集計対象を変位ベクトルV(i,j)ではなく法線ベクトルN(i,j)とする理由を説明しておく。
図5に示す計数システムでは、変位ベクトル定義部250により定義された変位ベクトルV(i,j)に基づいて、法線ベクトル定義部260において法線ベクトルN(i,j)を定義し、ベクトル長集計部270において、変位ベクトルV(i,j)の長さではなく、法線ベクトルN(i,j)の長さを集計している。ここでは、長さの集計対象を変位ベクトルV(i,j)ではなく法線ベクトルN(i,j)とする理由を説明しておく。
図17には、ハート型の移動体が検出ラインLの近傍を移動する場合に、着目単位画像P(i−1,j)に対して、図示の位置に最類似単位画像Q(i,j)が決定された例を示した。この場合に定義される変位ベクトルV(i,j)は、図11に示すように、着目単位画像P(i−1,j)の中心点E(j)から最類似単位画像Q(i,j)の中心点H(i,j)へ向かうベクトルであり、文字通り、移動体の変位方向を示すベクトルになり、その長さは移動体の変位量に相当する。したがって、移動体の変位量を集計するという観点からは、変位ベクトルV(i,j)の長さを集計する方が理にかなっている。
ところが、本発明では、図13に示すように、変位ベクトルV(i,j)に基づいて法線ベクトルN(i,j)を求め、この法線ベクトルN(i,j)の長さを集計対象としている。別言すれば、変位ベクトルV(i,j)の法線方向成分(検出基準点E(j)において検出ラインLに直交する法線Nの方向を向いた成分)を集計対象としていることになる。これは、本発明の目的が、移動体の移動量を求めることにあるわけではなく、検出ラインLを横切って移動した移動体の数を求めることにあるためである。
変位ベクトルV(i,j)の長さではなく、法線ベクトルN(i,j)の長さを集計すると、移動体が検出ラインLを横切る角度にかかわらず、検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数をより正確に検出することが可能になる。図20は、その理由を説明する平面図である。
図20(a) は移動体Mが検出ラインLを垂直方向αに横切った場合に集計対象となる法線ベクトルNを示し、図20(b) は移動体Mが検出ラインLに対して斜め30°の方向βに横切った場合に集計対象となる法線ベクトルNを示している。検出ラインL上に描かれた黒丸は、個々の検出基準点Eを示している。
図20(a) の場合、4個の検出基準点について変位ベクトルVが定義されており、その長さは、移動体Mの移動速度に比例する。これら4本の変位ベクトルVは検出ラインLに直交する方向αを向いたベクトルであるため、そのまま法線ベクトルNになる。したがって、4本の法線ベクトルNの長さは、いずれも移動体Mの移動速度に応じた長さになる。一方、図20(b) の場合、8個の検出基準点について変位ベクトルVが定義され、その長さは、移動体Mの移動速度に比例する。ただ、これら8本の変位ベクトルVは検出ラインLに対して30°をなす方向βを向いたベクトルであるため、これらについての法線ベクトルNの長さは、変位ベクトルVの長さの1/2(sin 30°)になる。
結局、図20(a) に示す4本の法線ベクトルNの長さに比べて、図20(b) に示す8本の法線ベクトルNの長さは1/2ということになる。このため、図20(a) に示す4本の法線ベクトルNの長さの集計値と、図20(b) に示す8本の法線ベクトルNの長さの集計値とは等しくなり、図20(a) に示す場合も図20(b) に示す場合も集計値Tは等しくなる。その結果、係数Kを用いた除算で最終的に得られる計数値Cも等しくなる。すなわち、適切な係数Kを設定しておけば、いずれの場合も検出ラインLを横切って移動した移動体の数として、計数値C=1個(図の移動体Mの個数)という結果が得られる。
もし、変位ベクトルの長さを集計対象として計数値を求めると、図20(a) に示す例の場合は1個という計数値が得られたとしても、図20(b) に示す例の場合は2個という計数値が得られることになり、移動体が検出ラインLを横切る角度に応じて異なる結果が得られることになり不都合である。このように、本発明において法線ベクトルを定義してその長さを集計する意義は、移動体が検出ラインLを横切る角度にかかわらず、検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数を正確に検出することを可能にする点にある。
もちろん、移動体Mの大きさが異なれば、計数値に変化が生じることになるので、移動体が人間や車両の場合、正確な人数や個数を示す計数値を得ることはできないが、統計的に意味のある計数値が得られれば実用上は十分であることは、既に§1で述べたとおりである。
<3−3. 移動体の速度の影響>
ここでは、本発明に係る計数システムに対する移動体の速度の影響を検討しておく。図21は、ベクトル長集計部270によって集計される集計値の時間変化を示すグラフであり、縦軸は単位時間あたりの集計値ΔT(具体的には、図14に示すような1枚のフレーム画像上に定義されたn本の法線ベクトルの方向別の長さの総和)、横軸は時間tを示す。図21(a) に実線で示すグラフは、図20(a) もしくは(b) に示すように、移動体Mが一定の速度で検出ラインLを通過した場合に得られる単位時間あたりの集計値ΔTの時間変化を示しており、最終的に得られる集計値Tは、この集計値ΔTを時間積分した値、すなわち、図にハッチングを施して示した部分の面積ということになる。
ここでは、本発明に係る計数システムに対する移動体の速度の影響を検討しておく。図21は、ベクトル長集計部270によって集計される集計値の時間変化を示すグラフであり、縦軸は単位時間あたりの集計値ΔT(具体的には、図14に示すような1枚のフレーム画像上に定義されたn本の法線ベクトルの方向別の長さの総和)、横軸は時間tを示す。図21(a) に実線で示すグラフは、図20(a) もしくは(b) に示すように、移動体Mが一定の速度で検出ラインLを通過した場合に得られる単位時間あたりの集計値ΔTの時間変化を示しており、最終的に得られる集計値Tは、この集計値ΔTを時間積分した値、すなわち、図にハッチングを施して示した部分の面積ということになる。
なお、図21に示すグラフで、集計値ΔTが時刻t1から徐々に立ち上がり、ショルダー部を経て一定値に達しているのは、移動体Mが検出ラインLを通過する際に、まず、その一部分が検出ラインLにかかるためである。たとえば、図20(a) に示す例の場合、移動体Mは、黒丸で示す4個の検出基準点の上を通過することになるが、最初は、その先頭部が中央の2点のみを通過し、やがて全体が4点を通過することになる。このため、単位時間あたりの集計値ΔTは時刻t1から徐々に立ち上がることになる。集計値ΔTが時刻t4の直前で徐々に立ち下がる形をしているのは、同様に、移動体Mの後尾部が最後に検出ラインLを通過することになるためである。
ここで、移動体Mが検出ラインLを横切る角度が変わったとしても、集計値Tの値に変わりはないことは、既に§3−2で述べたとおりであるが、移動体Mが検出ラインLを横切る速度が変わったとしても、やはり集計値Tの値に変わりはない。これは、図21(a) に実線で示すグラフと破線で示すグラフとを比較すると容易に理解できる。破線のグラフは、同じ移動体Mがより速い速度で検出ラインLを横切った場合の集計値ΔTの時間変化を示している。
2つのグラフの山のピークを比較すると、実線の山に比べて破線の山の方がピーク値が大きくなっている。これは後者の方が速度が速いため、単位時間あたりの変位量が大きく、変位ベクトルの長さが長くなり、法線ベクトルの長さも長くなるためである。その一方で、前者の山は時間軸上の時点t1〜t4という長時間に渡って分布しているのに対して、後者の山は時点t2〜t3という短時間に渡って分布する。これは、後者の方が検出ラインLを通過する時間が短いので当然である。
このような理由により、結局、実線グラフの面積(ハッチング部分)と破線グラフの面積とは等しくなり、最終的に得られる集計値Tに変わりはない。よって、移動体Mの速度が変化しても、集計値Tの値にほとんど影響は及ばないと考えてよい。実際、本願発明者が実験を行ったところ、複数の人間に検出ラインLを歩いて渡ってもらった場合と、走って渡ってもらった場合とで、最終的な計数値に有意な差はみられなかった。
図21(b) は、移動体Mが検出ラインL上で一時停止した場合に得られるグラフである。このグラフは、時点t1から集計値ΔTが徐々に立ち上がり、時点t4で立ち下がり終える、という点では、図21(a) に示すグラフと同じであるが、途中の時点t2〜t3において、集計値が突然0になっている。これは、時点t2において、移動体Mが検出ラインL上で一時停止し、時点t3から再び移動開始したケースを示している。このようなケースでも、前半の山の面積Taと後半の山の面積Tbとの和は、図21(a) に示す山の面積Tと同じになるため、結局、最終的に得られる集計値Tに変わりはない。
このように、本発明に係る計数システムは、移動体の速度にかかわらず、検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数を検出することができる。ただ、移動体の速度が速すぎて、探索領域A(j)の外へ出てしまうようなケースでは、最類似単位画像Q(i,j)を見つけることができず、法線ベクトルの長さの計数が行われなくなってしまい、正確な計数値を得ることができなくなる。したがって、探索領域設定部213は、計数対象となる移動体の速度や撮影装置100によって取得される動画のフレームレートを考慮して、適切な広さをもった探索領域A(j)を設定する必要がある点は、既に§2−3で述べたとおりである。
<<< §4. いくつかの変形例および応用例 >>>
ここでは、これまで述べてきた基本的実施形態に対する変形例や応用例について述べておく。
ここでは、これまで述べてきた基本的実施形態に対する変形例や応用例について述べておく。
<4−1. 着目時点から過去の参照時点を探索する変形例>
上述した基本的実施形態は、いわば着目時点から未来を探索する例ということができる。たとえば、図10(a) に示す例では、フレーム画像F(i−1)が撮影された時点t(i−1)を着目時点として、このときにブロックB(j)内に存在する単位画像を着目単位画像P(i−1,j)として抽出している。そして、図10(b) に示すように、次の参照時点t(i)において撮影されたフレーム画像F(i)の探索領域A(j)内を探索することにより、最類似単位画像Q(i,j)を見つける処理が行われている。これは、着目時点t(i−1)においてブロックB(j)内に位置した移動体もしくはその一部が、未来の参照時点t(i)ではどこに移動したかを探索する処理であり、着目時点t(i−1)から未来の参照時点t(i)を探索する処理ということができる。
上述した基本的実施形態は、いわば着目時点から未来を探索する例ということができる。たとえば、図10(a) に示す例では、フレーム画像F(i−1)が撮影された時点t(i−1)を着目時点として、このときにブロックB(j)内に存在する単位画像を着目単位画像P(i−1,j)として抽出している。そして、図10(b) に示すように、次の参照時点t(i)において撮影されたフレーム画像F(i)の探索領域A(j)内を探索することにより、最類似単位画像Q(i,j)を見つける処理が行われている。これは、着目時点t(i−1)においてブロックB(j)内に位置した移動体もしくはその一部が、未来の参照時点t(i)ではどこに移動したかを探索する処理であり、着目時点t(i−1)から未来の参照時点t(i)を探索する処理ということができる。
これに対して、ここで述べる変形例は、着目時点t(i)から過去の参照時点t(i−1)を探索する例ということになる。図22は、この変形例に係るシステムにおける最類似単位画像の探索処理を説明する平面図である。この変形例の場合、着目単位画像抽出部230は、図22(a) に示すように、フレーム画像F(i)が撮影された時点t(i)を着目時点として、このときにブロックB(j)内に存在する単位画像を着目単位画像P(i,j)として抽出する処理を行う。そして、最類似単位画像決定部240は、図22(b) に示すように、1つ前の過去の参照時点t(i−1)において撮影されたフレーム画像F(i−1)の探索領域A(j)内を探索することにより、最類似単位画像Q(i−1,j)を見つける処理を行うことになる。
この場合、図22(b) に示す最類似単位画像Q(i−1,j)は、まだ検出ラインLに到達する前の移動体もしくはその一部の画像ということになる。したがって、この変形例における探索処理は、着目時点t(i)においてブロックB(j)内に位置している単位画像が、過去の時点t(i−1)では、どこにいたかを探索する処理であり、着目時点から過去を探索する処理ということができる。なお、図22(b) において、ブロックB(j)内に存在する着目単位画像P(i−1,j)については、既に、更に1つ前の過去の時点t(i−2)に撮影されたフレーム画像F(i−2)の探索領域A(j)内の各単位画像(候補単位画像)と類似比較が行われており、既に、最類似単位画像Q(i−2,j)が探索されている。
図23は、この変形例に係るシステムにおける変位ベクトル定義部250の処理を説明する平面図である。図示のとおり、最類似単位画像Q(i−1,j)の中心点H(i−1,j)の位置から着目単位画像P(i,j)の中心点(すなわち、検出基準点E(j))の位置に向かうように変位ベクトルV(i,j)が定義されている。実際には、このような変位ベクトルV(i,j)が、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義されることになる。
このように、本発明では、前述した基本的実施形態のように、着目時点t(i−1)より後の(未来の)参照時点t(i)におけるフレーム画像F(i)内を探索して最類似単位画像Q(i,j)を見つけるようにしてもよいし、ここで述べる変形例のように、着目時点t(i)より前の(過去の)参照時点t(i−1)におけるフレーム画像F(i−1)内を探索して最類似単位画像Q(i−1,j)を見つけるようにしてもよいし、
なお、前述した基本的実施形態の場合は、図11に示すように、検出基準点E(j)を始点とする変位ベクトルV(i,j)が定義されており、各変位ベクトルV(i,j)は、図12に示すように、いずれも検出ラインL上に始点をもつベクトルになる。したがって、法線ベクトルN(i,j)を定義する際には、検出基準点E(j)において検出ラインLに対する法線Nを定義し、変位ベクトルV(i,j)の法線Nの方向成分を求めればよい。
これに対して、ここで述べる変形例の場合、図23に示すように、検出基準点E(j)を終点とする変位ベクトルV(i,j)が定義されることになるため、各変位ベクトルV(i,j)は、いずれも検出ラインL上に終点をもつベクトルになる。そこで、法線ベクトルN(i,j)を定義する処理上、検出ラインL上に始点をもつベクトルに変換した方が好ましい場合には、図23に示す変位ベクトルV(i,j)を、図24に示すように、その始点が検出基準点E(j)の位置にくるように平行移動して取り扱うようにすればよい。そうすれば、この変形例においても、図12に示すような変位ベクトルV(i,j)を定義することができ、図14に示すような法線ベクトルN(i,j)を求めることができる。
なお、図23には、正方形からなる最類似単位画像Q(i−1,j)の中心点H(i−1,j)から着目単位画像P(i,j)の中心に位置する検出基準点E(j)に向かうベクトルを変位ベクトルV(i,j)と定義しているが、変位ベクトルV(i,j)は、必ずしも両者の中心点同士を結ぶベクトルとして定義する必要はない。ただ、移動体の変位方向を良好な精度をもって示すには、図示の例のように、中心点同士を結ぶベクトルとして変位ベクトルV(i,j)を定義するのが好ましい。
結局、ここで述べる変形例では、着目単位画像抽出部230は、図22(a) に示すように、第i番目のフレーム画像F(i)から、第j番目のブロックB(j)内の画像を着目単位画像P(i,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行い、最類似単位画像決定部240は、図22(b) に示すように、第(i−1)番目のフレーム画像F(i−1)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、着目単位画像P(i,j)に最も類似する同サイズの画像を最類似単位画像Q(i−1,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行うことになる。
そして、変位ベクトル定義部250は、図23に示すように、最類似単位画像Q(i−1,j)の位置から着目単位画像P(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する処理を行う。ここに示す実施例の場合、変位ベクトル定義部250は、各最類似単位画像Q(i−1,j)の中心点H(i−1,j)から各検出基準点E(j)に向かうベクトルを変位ベクトルV(i,j)と定義しており、法線ベクトル定義部260は、図24に示すように、各変位ベクトルV(i,j)をその始点が各検出基準点E(j)の位置にくるように平行移動し、検出基準点E(j)の位置における検出ラインLに対する法線方向の成分を法線ベクトルN(i,j)と定義している。
<4−2. 複数通りの係数Kから選択する変形例>
既に述べたとおり、本発明に係る計数システムは、移動体の数の統計的な概算値を得るためのシステムであるため、基本的には、歩行者の正確な人数や車両の正確な台数を得ることはできない。実際、通行人を計数する用途に利用した場合、大人が多い場合と子供が多い場合とでは、同じ係数Kを用いて計数値を求めると、前者の計数値の方が後者の計数値よりも多くなる。
既に述べたとおり、本発明に係る計数システムは、移動体の数の統計的な概算値を得るためのシステムであるため、基本的には、歩行者の正確な人数や車両の正確な台数を得ることはできない。実際、通行人を計数する用途に利用した場合、大人が多い場合と子供が多い場合とでは、同じ係数Kを用いて計数値を求めると、前者の計数値の方が後者の計数値よりも多くなる。
より正確な計数値を得るための1つのアプローチは、移動体に応じて適切な係数K(1移動体あたりの集計値)を設定することである。§1では、所定のサンプル期間について移動体の数を実測し、1移動体あたりの集計値を係数Kとして設定する例を述べた。たとえば、図1に示すように、この係数システムを校門を出入りする人数をカウントする用途に利用する場合、撮影装置100の設置位置や撮影対象範囲は常に固定した状態にすることができるため、基本的には、予め適切な係数Kを設定しておけば、計数値算出部280は、ベクトル長集計部270による集計値Tを当該係数Kで除する補正演算を行うことにより、常に、ある程度正確な計数値Cを出力することが可能である。
しかしながら、実際には、適切な係数Kの値は、時刻、日付、曜日、季節もしくは天候に応じて変動することが多い。たとえば、図1に示すように、校門周辺の同一の撮影対象範囲についての撮影画像を解析して、校門を出入りした人数を計数する場合であっても、時間帯によって、個々の移動体の特徴に偏りが生じる場合がある。たとえば、朝8時〜9時の登校時や、午後3時〜5時の下校時には、校門を出入りする移動体は、もっぱら登下校する生徒たちということになろう。これに対して、午前10時〜12時、午後6時〜9時といった時間帯では、校門を出入りする移動体は、教師、職員、父兄といった大人になろう。
したがって、出入りする移動体の特徴までを考慮して適切な係数Kを設定するのであれば、計数値算出部280に対して、登下校の時間帯については、移動体の多くが生徒であることを考慮して小さめの係数K(child)を設定し、それ以外の時間帯については、移動体の多くが大人であることを考慮して大きめの係数K(adult)を設定しておけばよい。計数値算出部280に計時機能を設けておけば、登下校の時間帯には、係数K(child)を用いた補正演算を行って計数値を算出し、それ以外の時間帯には、係数K(adult)を用いた補正演算を行って計数値を算出する、というように、実時間帯に合わせて係数K(child)もしくは係数K(adult)を適宜自動選択して計数値を算出する処理が可能になる。
もちろん、日付や曜日に応じて個々の移動体の特徴に偏りが生じる場合であれば、日付や曜日ごとに異なる係数Kを設定しておき、日付や曜日に応じて適切な係数Kを自動的に選択して用いるようにすればよい。
また、適切な係数Kの値は、季節や天候によって変わる場合もある。特に、屋外を撮影対象とする場合、移動体の影の大きさは季節や天候によって変わってくる(もちろん、時刻によっても変わってくる)。影も移動体とともに移動するため、影の大きさが変わると、移動体の大きさが変わった場合と同様に、ベクトル長の集計値Tに影響が及ぶ。
したがって、影の影響まで考慮して適切な係数Kを設定するのであれば、計数値算出部280に対して、影の短い夏については小さめの係数K(summer)を設定し、影が伸びる冬については大きめの係数K(winter)を設定し、春と秋については係数K(regular)を設定しておけばよい。この場合も、計数値算出部280に計時機能(日付認識機能)を設けておけば、季節に応じて適切な係数Kを適宜自動選択して計数値を算出する処理が可能になる。もちろん、晴れの日、曇りの日、雨の日について、それぞれ異なる係数Kを設定しておき、計数値算出部280に、たとえば、インターネットを利用して天候情報を取得する機能を設けておけば、計数値算出部280は、認識した天候に応じて適切な係数Kを適宜自動選択して計数値を算出することができる。
要するに、計数値算出部280が、複数通りの係数Kを記憶しており、時刻、日付、曜日、季節もしくは天候に応じて1つの係数Kを選択する機能を有し、ベクトル長集計部270が求めた集計値Tを、選択された係数Kで除した値を移動体の数を示す計数値として算出し、これを出力するようにすればよい。
<4−3. 奥行き補正を行う変形例>
上述した§4−2では、より正確な計数値を得るための1つのアプローチとして、移動体の特徴に応じて適切な係数Kを設定する方法を述べた。ここでは、別なアプローチとして、移動体に対する奥行き補正を行う変形例を述べる。
上述した§4−2では、より正確な計数値を得るための1つのアプローチとして、移動体の特徴に応じて適切な係数Kを設定する方法を述べた。ここでは、別なアプローチとして、移動体に対する奥行き補正を行う変形例を述べる。
図25は、奥行き補正機能をもった本発明の変形例の原理を示す平面図である。この図25には、検出ラインL上に2名の人物M1,M2(移動体)が位置する状態を示すフレーム画像Fが示されている。ここでは、この2名の人物M1,M2が互いに同じ身長、同じ体格をもった人物であったとしよう。この場合、人物M1が検出ラインLを通過することにより得られる集計値と、人物M2が検出ラインLを通過することにより得られる集計値とは、本来は同じになるべきである。
しかしながら、一般的な撮影装置100によって得られたフレーム画像Fは、いわゆる遠近法が適用された二次元画像になるため、2つの同一物体が三次元空間上に奥行きをもって配置されていた場合、フレーム画像F上では、奥に配置された物体は手前に配置された物体に比べて小さく写る。図25に示す例でも、人物M1は人物M2よりも小さくなっている。このため、子供と大人で相違が生じるように、人物M1に基づいて得られる集計値は、人物M2に基づいて得られる集計値よりも小さくなってしまう。
これは、たとえば、全く同じ身長および体格の人物10名が、検出ラインLを通過した場合であっても、奥の位置を通過した場合と手前の位置を通過した場合とでは、ベクトル長集計部270による集計結果に差が生じることを意味する。したがって、計数値算出部280が同じ係数Kを用いた補正によって計数値を算出すると、同じ10名が通過した場合でも、計数値に差が生じることになる。図1に示す例のように、校門の手前と奥とで寸法差があまりない撮影環境で得られたフレーム画像Fについては、通過位置に基づく誤差はそれほど大きくないが、図25に示すような撮影環境で得られたフレーム画像Fについての解析を行う場合、より正確な計数値を得るために、奥行き補正を行うのが好ましい。
たとえば、図25に示す例において、検出ラインL上の2点L1,L2に同一身長同一体格の人物M1,M2が立っていた場合を考える。ここで、フレーム画像F上では、L1に立っている人物M1の画像上の身長がZ1、L2に立っている人物M2の画像上の身長がZ2であったものとしよう。この場合、検出ラインL上に等間隔で検出基準点を設定し、等間隔でブロックを設定すると、点L1を通過する人物によって定義される変位ベクトルの数と、点L2を通過する人物によって定義される変位ベクトルの数との比は、ほぼZ1:Z2になり、それぞれについての法線ベクトルの長さの集計値の比も、ほぼZ1:Z2になる。本来、当該比は1:1になるべきものである。そこで、より正確な集計値を得るには、点L1に定義される法線ベクトルの長さを基準とすると、点L2に定義される法線ベクトルの長さをZ1/Z2倍にする奥行き補正を行うようにすればよい。
すなわち、検出ライン設定部211が、検出ラインLを設定する際に、この検出ラインLに沿って重みパラメータwを設定するようにし、ベクトル長集計部270が、法線ベクトルN(i,j)の長さを集計して集計値Tを求める際に、個々の法線ベクトルN(i,j)の長さに当該法線ベクトルの位置に対応した重みパラメータwを乗じた値の和を求めるようにすればよい。
具体的には、検出ライン設定部211に、検出ラインL上の2点についての寸法パラメータを指定するオペレータの入力操作を受け付け、これら2点についての寸法パラメータに基づく線形補間処理により、検出ラインL上の任意の位置における重みパラメータを決定する機能を設けておけばよい。
たとえば、図25に示すようなフレーム画像F上において、オペレータが白丸で示す2点L1,L2をクリック操作などで指定することにより、検出ラインLの設定が可能になることは、既に§2−3で説明した。このとき、オペレータには、これら2点についての寸法パラメータZ1,Z2を併せて入力してもらうようにする。ここで、寸法パラメータZ1,Z2は、それぞれ同一物体を三次元空間上の2点L1,L2に配置した場合の二次元フレーム画像F上における相対的な寸法を示す値であれば、どのような単位の寸法値を入力してもかまわない。
一例を挙げれば、図25に示すように、フレーム画像F上に同身長の人物M1,M2が写っている場合は、これら人物M1,M2の画像上の身長をディスプレイ画面上に定規を当てて実測し、キーボードから実測値を入力するような方法を採ってもかまわない。あるいは、ディスプレイ画面上に写っている人物M1,M2の頭頂点の位置をクリック操作などで指定する入力を行えば、検出ライン設定部211は、検出ラインLと各頭頂点との距離として、寸法パラメータZ1,Z2を自動計測することができる。
こうして、検出ラインL上の2点L1,L2について、それぞれ寸法パラメータZ1,Z2の値が得られれば、図26に示すような線形補間処理により、検出ラインL上の任意の点における寸法パラメータを求めることができる。すなわち、図26に示すように、横軸として寸法ラインL上の座標軸Lをとり、縦軸として寸法パラメータZをとったグラフを考え、座標値Lに応じてパラメータ値Zが線形に変化するものとすれば、寸法ラインL上で座標値Ljをもつ任意の点Ljについての寸法パラメータZjは、グラフの下方の式(6)に示すとおり、
Zj=Z1・(Lj−L1)/(L2−L1)
+Z2・(L2−Lj)/(L2−L1) 式(6)
なる線形補間式により求めることができる。
Zj=Z1・(Lj−L1)/(L2−L1)
+Z2・(L2−Lj)/(L2−L1) 式(6)
なる線形補間式により求めることができる。
そこで、式(7)により、この寸法パラメータZjの逆数wjを求め、
wj=1/Zj 式(7)
当該逆数wjを重みパラメータとする。そして、ベクトル長集計部270が、法線ベクトルN(i,j)の長さを集計して集計値Tを求める際に、個々の法線ベクトルN(i,j)の長さに当該法線ベクトルの位置に対応した位置の重みパラメータwjを乗じた値の和を求めるようにすればよい。
wj=1/Zj 式(7)
当該逆数wjを重みパラメータとする。そして、ベクトル長集計部270が、法線ベクトルN(i,j)の長さを集計して集計値Tを求める際に、個々の法線ベクトルN(i,j)の長さに当該法線ベクトルの位置に対応した位置の重みパラメータwjを乗じた値の和を求めるようにすればよい。
図27は、このような奥行き補正機能をもった変形例におけるベクトル長集計部270による集計演算を示す図である。すなわち、この変形例では、第1方向集計値T1および第2方向集計値T2は、
T1 = Σi=2〜m Σj=1〜n d1(i,j)・wj 式(8)
T2 = Σi=2〜m Σj=1〜n d2(i,j)・wj 式(9)
で与えられる。この式(8),(9)は、図15に示す式(1),(2)の各項d1(i,j)およびd2(i,j)に、それぞれ重みパラメータwjを乗じたものになっており、各項d1(i,j)およびd2(i,j)の意味は、図15の(a) 〜(c) に記載されたとおりである。
T1 = Σi=2〜m Σj=1〜n d1(i,j)・wj 式(8)
T2 = Σi=2〜m Σj=1〜n d2(i,j)・wj 式(9)
で与えられる。この式(8),(9)は、図15に示す式(1),(2)の各項d1(i,j)およびd2(i,j)に、それぞれ重みパラメータwjを乗じたものになっており、各項d1(i,j)およびd2(i,j)の意味は、図15の(a) 〜(c) に記載されたとおりである。
このような奥行き補正を行えば、検出ラインLの手前側ほど、より小さな重みパラメータwjが乗じられることになるため、移動体のみかけの大きさが検出ラインL上の位置に応じて大きく変わる撮影環境で得られたフレーム画像Fを用いた場合でも、正確な計数値を得ることができるようになる。
<4−4. ブロック設定の変形例>
図8では、ブロック設定部212によって、検出ラインL上に等間隔のピッチpでn個の検出基準点E(1)〜E(n)を設定し、更に、個々の検出基準点を中心とする一辺の長さpの正方形からなるn個のブロックB(1)〜B(n)を設定した例を示した。このような方法でブロック設定を行うと、n個のブロックは互いに排他的な領域に配置されることになるが、個々のブロックは、必ずしも相互に排他的な領域として設定する必要はなく、隣接するブロックが部分的に重なり合うように設定してもかまわない。
図8では、ブロック設定部212によって、検出ラインL上に等間隔のピッチpでn個の検出基準点E(1)〜E(n)を設定し、更に、個々の検出基準点を中心とする一辺の長さpの正方形からなるn個のブロックB(1)〜B(n)を設定した例を示した。このような方法でブロック設定を行うと、n個のブロックは互いに排他的な領域に配置されることになるが、個々のブロックは、必ずしも相互に排他的な領域として設定する必要はなく、隣接するブロックが部分的に重なり合うように設定してもかまわない。
図28は、ブロック設定部212が、検出ラインLに沿って、相互に部分的な重なりを生じる位置に複数のブロックB(1),B(2),B(3),B(4),... を設定した例を示す平面図である。ここで、実線で描かれたブロックB(1)は検出基準点E(1)を中心とした正方形状のブロックであり、破線で描かれたブロックB(2)は検出基準点E(2)を中心とした正方形状のブロックであり、一点鎖線で描かれたブロックB(3)は検出基準点E(3)を中心とした正方形状のブロックであり、二点鎖線で描かれたブロックB(4)は検出基準点E(4)を中心とした正方形状のブロックである。
このように、検出基準点Eのピッチpの比べて、各ブロックを構成する正方形の一辺の長さを大きくとれば、隣接するブロック間に部分的な重なりが生じるようになるが、これまで述べてきた基本的な実施形態の処理動作に何ら支障は生じない。むしろ、実用上は、この図28に示す例のように、相互に部分的な重なりを生じる位置に各ブロックを設定するのが好ましい。これは、ブロックの配置密度を高めることにより、より高精度な計数を行うことができるようになるためである。
なお、本発明において設定するブロックB(j)の形状は、必ずしも正方形である必要はなく、任意の矩形、多角形、円であってもかまわない。ただ、一般的なフレーム画像Fは、縦横に並んだ多数の画素配列によって構成されているため、実用上は、矩形状のブロックを設定するのが好ましい。探索領域A(j)についても同様である。
また、ブロックB(j)の形状、大きさ、配置ピッチ(検出基準点E(j)の配置ピッチ)も一定である必要はなく、個々のブロックごとに異なるような設定を行ってもかまわない。ただ、実用上は、ブロックB(j)の形状、大きさ、配置ピッチを共通にしておいた方が、個々のブロックごとに同じ処理を繰り返し実行することができるので、手順を簡素化することができる点において好ましい。探索領域A(j)についても同様である。
<4−5. 検出ライン設定の変形例>
これまで述べてきた基本的実施形態では、直線状の検出ラインLを設定する例を述べたが、検出ラインLは必ずしも直線である必要はなく、円弧やベジェ曲線等の任意曲線であってもかまわない。あるいは、円、多角形、楕円といった図形の輪郭線を検出ラインとして設定してもよい。要するに、本発明に係るシステムは、所定の検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数を示す計数値を求めるシステムであるから、そのような2つの領域を定義することができる検出ラインであれば、どのような検出ラインを設定してもかまわない。
これまで述べてきた基本的実施形態では、直線状の検出ラインLを設定する例を述べたが、検出ラインLは必ずしも直線である必要はなく、円弧やベジェ曲線等の任意曲線であってもかまわない。あるいは、円、多角形、楕円といった図形の輪郭線を検出ラインとして設定してもよい。要するに、本発明に係るシステムは、所定の検出ラインLを越えて一方の領域から他方の領域に移動した移動体の数を示す計数値を求めるシステムであるから、そのような2つの領域を定義することができる検出ラインであれば、どのような検出ラインを設定してもかまわない。
図29は、検出ライン設定部211によって、楕円輪郭状の検出ラインLを設定した例を示す平面図である。このように、図形の輪郭線を検出ラインLとして設定すると、当該図形の内部の領域が第1の領域A1、当該図形の外部の領域が第2の領域A2ということになる。したがって、この検出ラインLを境界として区分けされた第1の領域A1から第2の領域A2へ向かう第1方向D1とは、この図形の内側から外側へと向かう方向ということになり、第2の領域A2から第1の領域A1へ向かう第2方向D2とは、この図形の外側から内側へと向かう方向ということになる。
このように、本発明にいう「第1方向D1」や「第2方向D2」とは、必ずしも地理的な特定方向を意味するものではなく、検出ラインLとの関係で相対的に定義されるべき方向ということになる。
<4−6. 移動物品の個数カウントシステムへの応用例>
これまでの基本的実施形態では、本発明に係る計数システムにより、検出ラインLを通過する人物の人数を計数する例を述べたが、ここでは、当該計数システムを、移動物品の個数をカウントシステムに応用した応用例を述べる。
これまでの基本的実施形態では、本発明に係る計数システムにより、検出ラインLを通過する人物の人数を計数する例を述べたが、ここでは、当該計数システムを、移動物品の個数をカウントシステムに応用した応用例を述べる。
図30は、このような移動物品の個数カウントシステムの動作を説明する斜視図である。図の例では、ベルトコンベアなどの搬送路20上に載置された多数の物品25が、図の左方向に搬送されている。このような物品の搬送系は、様々な製品の製造ライン、加工ライン、検品ラインで利用されている。そこで、この搬送路上を流れる個々の物品を移動体として、本発明に係る移動体の方向別計数システムを適用すれば、移動物品の個数カウントシステムを実現することができる。
すなわち、図示のように所定の搬送路20上を流れる物品を撮影できる位置に、本発明に係る撮影装置100を配置し、図示のような所定の撮影対象範囲についての動画を収録し、これを画像解析装置200に取り込み、図示のような位置に検出ラインLを設定して解析を行うようにすれば、搬送路20上を流れる物品25の個数をカウントすることが可能になる。物品25が同一の工業製品である場合、適切な係数Kを設定することにより、かなり正確な個数のカウントが可能になる。なお、実用上は、搬送路20の上面に対して垂直上方に撮影装置100を配置し、垂直下方を見下ろす方向に撮影した画像を収録した方が、より正確な計数値を得る上で好ましい。
<4−7. 巻取材料の搬送量カウントシステムへの応用例>
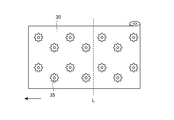
図31は、壁紙、包装材などの用途に利用される一般的な巻取材料30の一例を示す正面図である。このような巻取材料30には、無地の背景上に図示のような規則的な模様パターン35(この例では、花柄の模様パターン)が一定周期で繰り返し印刷されていることが少なくない。そのような巻取材料30については、個々の模様パターン35を移動体として、本発明に係る移動体の方向別計数システムを適用すれば、巻取材料の搬送量カウントシステムを実現することができる。
図31は、壁紙、包装材などの用途に利用される一般的な巻取材料30の一例を示す正面図である。このような巻取材料30には、無地の背景上に図示のような規則的な模様パターン35(この例では、花柄の模様パターン)が一定周期で繰り返し印刷されていることが少なくない。そのような巻取材料30については、個々の模様パターン35を移動体として、本発明に係る移動体の方向別計数システムを適用すれば、巻取材料の搬送量カウントシステムを実現することができる。
すなわち、この巻取材料30を図の左方へと引き出しながら何らかの加工や検査を行う場合に、図示の位置に検出ラインLを設定し、この検出ラインLを越えて左方に移動する模様パターン(花柄パターン)の数を計数し、当該計数値に所定の比例定数(模様パターンの印刷周期に応じた値)を乗ずることにより、引き出された巻取材料30の搬送量(長尺方向の長さ)を得ることが可能になる。
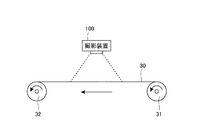
図32は、このような巻取材料の搬送量カウントシステムの動作を説明する斜視図である。図の例では、送出ロール31として装着された巻取材料30が先端から引き出され、図の左方へと搬送され、巻取ロール32として巻き取られる様子が示されている。実際には、この送出ロール31から送り出されてから巻取ロール32で巻き取られるまでの間、引き出された巻取材料30の部分に対して、何らかの加工処理や検査処理が行われることになる。そこで、この巻取材料30上の個々の模様パターン35を移動体として、本発明に係る移動体の方向別計数システムを適用すれば、巻取材料の搬送量カウントシステムを実現することができる。
すなわち、図示のように、送出ロール31から送り出されてから巻取ロール32で巻き取られるまで、所定の処理経路上を流れる巻取材料30を撮影できる位置に撮影装置100を配置し、図示のような所定の撮影対象範囲についての動画を収録し、これを画像解析装置200に取り込み、図31に示すような所定位置に検出ラインLを設定して解析を行うようにすれば、処理経路上を流れる巻取材料30の模様パターン35をカウントすることにより、巻取材料の搬送量をカウントすることができる。
このような応用を考慮すれば、本発明に係る移動体の方向別計数システムは、必ずしも個々の移動体の「数」を計数する用途に限定されるものではなく、移動体の一般的な「量」を計数する用途にも利用できることがわかる。たとえば、これまで述べてきた基本的実施形態では、人物を移動体としているが、検出ラインLを越えて移動した人物の人数ではなく、その体積を計数したと考えれば、移動体の量を計数するシステムと言うことができる。
10:縄暖簾
20:搬送路
25:物品
30:巻取材料
31:送出ロール
32:巻取ロール
35:模様パターン
100:撮影装置
200:画像解析装置
211:検出ライン設定部
212:ブロック設定部
213:探索領域設定部
220:入力画像格納部
230:着目単位画像抽出部
240:最類似単位画像決定部
250:変位ベクトル定義部
260:法線ベクトル定義部
270:ベクトル長集計部
280:計数値算出部
300:ディスプレイ装置
A1,A2:検出ラインLにより区分けされた領域
A(j),A(n):探索領域
B(1)〜B(j)〜B(n):ブロック
C1,C2:計数値
D1,D2:移動方向
d1(i,j):第1方向D1を向いた法線ベクトルN(i,j)の長さ
d2(i,j):第2方向D2を向いた法線ベクトルN(i,j)の長さ
d(+),d(−):縄の変位量
E,E(1)〜E(j)〜E(n):検出基準点
F,F(i−2),F(i−1),F(i),F(i+1):フレーム画像
G1,G2:ゲート支柱
H(i,j):最類似単位画像Q(i,j)の中心点
H(i−1,j):最類似単位画像Q(i−1,j)の中心点
h:画素の番号
i:フレームの番号を示すパラメータ(時間軸のパラメータ:i=1〜m)
j:検出基準点の番号を示すパラメータ(空間軸のパラメータ:j=1〜n)
K:係数
k:候補の番号
L:検出ライン
L1〜L3,Lj:点
M,M(i),M(i−1):移動体
M1〜M3:移動体(人物)
m:フレーム画像の総数
N:検出ラインLに対する法線
N(i,j):法線ベクトル
n:検出基準点の総数
P(i−1,j),P(i,j):着目単位画像
P(h):着目単位画像のh番目の画素
Pr(h):着目単位画像のh番目の画素の赤色成分の画素値
Pg(h):着目単位画像のh番目の画素の緑色成分の画素値
Pb(h):着目単位画像のh番目の画素の青色成分の画素値
Q(i−1,j),Q(i,j):最類似単位画像
R,R(+),R(−):縄暖簾を構成する縄
T:集計値
T1:第1方向集計値
T2:第2方向集計値
ΔT:単位時間あたりの集計値
Ta,Tb:部分集計値
t:時間
t1〜t4:時点
t(i−1),t(i):時点
U(i,j,1),U(i,j,k):候補単位画像
U(h):候補単位画像のh番目の画素
Ur(h):候補単位画像のh番目の画素の赤色成分の画素値
Ug(h):候補単位画像のh番目の画素の緑色成分の画素値
Ub(h):候補単位画像のh番目の画素の青色成分の画素値
V(i,j):変位ベクトル
W:塀
wj:重みパラメータ
X:二次元XY座標系の座標軸
Y:二次元XY座標系の座標軸
Z1,Z2,Zj:人物の画像上のみかけの身長/寸法パラメータ
α:移動方向
β:移動方向
ξ:両単位画像の相違度
ξmin:相違度の最小値
ξth:相違度のしきい値
20:搬送路
25:物品
30:巻取材料
31:送出ロール
32:巻取ロール
35:模様パターン
100:撮影装置
200:画像解析装置
211:検出ライン設定部
212:ブロック設定部
213:探索領域設定部
220:入力画像格納部
230:着目単位画像抽出部
240:最類似単位画像決定部
250:変位ベクトル定義部
260:法線ベクトル定義部
270:ベクトル長集計部
280:計数値算出部
300:ディスプレイ装置
A1,A2:検出ラインLにより区分けされた領域
A(j),A(n):探索領域
B(1)〜B(j)〜B(n):ブロック
C1,C2:計数値
D1,D2:移動方向
d1(i,j):第1方向D1を向いた法線ベクトルN(i,j)の長さ
d2(i,j):第2方向D2を向いた法線ベクトルN(i,j)の長さ
d(+),d(−):縄の変位量
E,E(1)〜E(j)〜E(n):検出基準点
F,F(i−2),F(i−1),F(i),F(i+1):フレーム画像
G1,G2:ゲート支柱
H(i,j):最類似単位画像Q(i,j)の中心点
H(i−1,j):最類似単位画像Q(i−1,j)の中心点
h:画素の番号
i:フレームの番号を示すパラメータ(時間軸のパラメータ:i=1〜m)
j:検出基準点の番号を示すパラメータ(空間軸のパラメータ:j=1〜n)
K:係数
k:候補の番号
L:検出ライン
L1〜L3,Lj:点
M,M(i),M(i−1):移動体
M1〜M3:移動体(人物)
m:フレーム画像の総数
N:検出ラインLに対する法線
N(i,j):法線ベクトル
n:検出基準点の総数
P(i−1,j),P(i,j):着目単位画像
P(h):着目単位画像のh番目の画素
Pr(h):着目単位画像のh番目の画素の赤色成分の画素値
Pg(h):着目単位画像のh番目の画素の緑色成分の画素値
Pb(h):着目単位画像のh番目の画素の青色成分の画素値
Q(i−1,j),Q(i,j):最類似単位画像
R,R(+),R(−):縄暖簾を構成する縄
T:集計値
T1:第1方向集計値
T2:第2方向集計値
ΔT:単位時間あたりの集計値
Ta,Tb:部分集計値
t:時間
t1〜t4:時点
t(i−1),t(i):時点
U(i,j,1),U(i,j,k):候補単位画像
U(h):候補単位画像のh番目の画素
Ur(h):候補単位画像のh番目の画素の赤色成分の画素値
Ug(h):候補単位画像のh番目の画素の緑色成分の画素値
Ub(h):候補単位画像のh番目の画素の青色成分の画素値
V(i,j):変位ベクトル
W:塀
wj:重みパラメータ
X:二次元XY座標系の座標軸
Y:二次元XY座標系の座標軸
Z1,Z2,Zj:人物の画像上のみかけの身長/寸法パラメータ
α:移動方向
β:移動方向
ξ:両単位画像の相違度
ξmin:相違度の最小値
ξth:相違度のしきい値
Claims (20)
- 複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数するシステムであって、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
前記フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを越えて一方の領域から他方の領域に移動した移動体の数もしくは量を示す計数値を求める画像解析装置と、
を備え、
前記画像解析装置は、
前記計数対象期間に渡って前記撮影装置が撮影したフレーム画像を時系列に沿って順次入力し、これを格納する入力画像格納部と、
前記フレーム画像上に前記検出ラインを設定する検出ライン設定部と、
前記検出ラインに沿って、複数のブロックを設定するブロック設定部と、
前記複数のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
所定の着目時点におけるフレーム画像から個々のブロック内の画像をそれぞれ着目単位画像として抽出する処理を、前記着目時点を次々と変化させながら繰り返し行う着目単位画像抽出部と、
前記着目時点の前もしくは後の参照時点におけるフレーム画像に対して、個々のブロックについて設定された探索領域内を探索し、それぞれ対応するブロックについて抽出された前記着目単位画像に最も類似する同サイズの画像を最類似単位画像と決定する処理を、前記着目時点を次々と変化させながら繰り返し行う最類似単位画像決定部と、
前記着目単位画像抽出部によって抽出された個々の着目単位画像と、これらに対応して前記最類似単位画像決定部によって決定された個々の最類似単位画像と、について、時系列に沿って一方から他方に向かう変位ベクトルをそれぞれ定義する変位ベクトル定義部と、
前記各変位ベクトルについて、前記検出ラインに対する法線方向成分を示す法線ベクトルをそれぞれ定義する法線ベクトル定義部と、
前記各法線ベクトルのうち、前記一方の領域から他方の領域への移動を示す方向を向いたベクトルの長さを集計して集計値を求める処理を行うベクトル長集計部と、
前記集計値に基づいて前記計数値を出力する計数値算出部と、
を有することを特徴とする移動体の方向別計数システム。 - 複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数するシステムであって、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
前記フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、前記第2の領域から前記第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
を備え、
前記画像解析装置は、
前記計数対象期間に渡って前記撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
前記フレーム画像上に前記検出ラインを設定する検出ライン設定部と、
前記検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
前記複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第(i−1)番目のフレーム画像F(i−1)から、第j番目のブロックB(j)内の画像を着目単位画像P(i−1,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第i番目のフレーム画像F(i)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、前記着目単位画像P(i−1,j)に最も類似する同サイズの画像を最類似単位画像Q(i,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
前記着目単位画像P(i−1,j)の位置から前記最類似単位画像Q(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
前記各変位ベクトルV(i,j)について、前記検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
前記各法線ベクトルN(i,j)のうち、前記第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、前記第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
前記第1方向集計値T1に基づいて前記第1計数値C1を算出する処理と、前記第2方向集計値T2に基づいて前記第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を有することを特徴とする移動体の方向別計数システム。 - 請求項2に記載の移動体の方向別計数システムにおいて、
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各検出基準点E(j)から各最類似単位画像Q(i,j)の中心点H(i,j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)について、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義することを特徴とする移動体の方向別計数システム。 - 複数の移動体がそれぞれ移動している状態において、当該移動体を移動方向別に計数するシステムであって、
所定の撮影対象範囲を定点から同一視野で撮影することにより、時系列で並べられた複数のフレーム画像からなる動画を収録する撮影装置と、
前記フレーム画像を解析することにより、所定の計数対象期間内に、所定の検出ラインを境界として区分けされた第1の領域から第2の領域へ向かう第1方向に移動した移動体の数もしくは量を示す第1計数値C1と、前記第2の領域から前記第1の領域へ向かう第2方向に移動した移動体の数もしくは量を示す第2計数値C2と、の少なくとも一方を求める画像解析装置と、
を備え、
前記画像解析装置は、
前記計数対象期間に渡って前記撮影装置が撮影したフレーム画像を時系列に沿って、第1番目のフレーム画像から第m番目のフレーム画像に至るまで順次入力し、これを格納する入力画像格納部と、
前記フレーム画像上に前記検出ラインを設定する検出ライン設定部と、
前記検出ラインに沿って、複数n個のブロックを設定するブロック設定部と、
前記複数n個のブロックについて、それぞれ当該ブロックおよびその周辺領域を包含する探索領域を設定する探索領域設定部と、
第i番目のフレーム画像F(i)から、第j番目のブロックB(j)内の画像を着目単位画像P(i,j)として抽出する処理を、j=1〜nについて、かつ、i=2〜mについて行う着目単位画像抽出部と、
第(i−1)番目のフレーム画像F(i−1)に対して、第j番目のブロックB(j)について設定された探索領域A(j)内を探索し、前記着目単位画像P(i,j)に最も類似する同サイズの画像を最類似単位画像Q(i−1,j)と決定する処理を、j=1〜nについて、かつ、i=2〜mについて行う最類似単位画像決定部と、
前記最類似単位画像Q(i−1,j)の位置から前記着目単位画像P(i,j)の位置へ向かう変位ベクトルV(i,j)を、j=1〜nについて、かつ、i=2〜mについて、それぞれ定義する変位ベクトル定義部と、
前記各変位ベクトルV(i,j)について、前記検出ラインに対する法線方向成分を示す法線ベクトルN(i,j)をそれぞれ定義する法線ベクトル定義部と、
前記各法線ベクトルN(i,j)のうち、前記第1方向を向いたベクトルの長さを集計して第1方向集計値T1を求める処理と、前記第2方向を向いたベクトルの長さを集計して第2方向集計値T2を求める処理と、の少なくとも一方を行うベクトル長集計部と、
前記第1方向集計値T1に基づいて前記第1計数値C1を算出する処理と、前記第2方向集計値T2に基づいて前記第2計数値C2を算出する処理と、の少なくとも一方を行う計数値算出部と、
を有することを特徴とする移動体の方向別計数システム。 - 請求項4に記載の移動体の方向別計数システムにおいて、
ブロック設定部が、検出ライン上に所定間隔でn個の検出基準点E(j)を定め(但し、j=1〜n)、各検出基準点E(j)を中心とするブロックB(j)を設定し、
変位ベクトル定義部が、各最類似単位画像Q(i−1,j)の中心点H(i−1,j)から各検出基準点E(j)に向かうベクトルを変位ベクトルV(i,j)と定義し、
法線ベクトル定義部が、各変位ベクトルV(i,j)をその始点が各検出基準点E(j)の位置にくるように平行移動し、検出基準点E(j)の位置における検出ラインに対する法線方向の成分を法線ベクトルN(i,j)と定義することを特徴とする移動体の方向別計数システム。 - 請求項1〜5のいずれかに記載の移動体の方向別計数システムにおいて、
検出ライン設定部が、フレーム画像上に重ねて配置された直線、曲線、もしくは図形を指定するオペレータの描画操作に基づいて、検出ラインの設定を行うことを特徴とする移動体の方向別計数システム。 - 請求項1〜6のいずれかに記載の移動体の方向別計数システムにおいて、
ブロック設定部が、検出ラインに沿って、相互に部分的な重なりを生じる位置に複数のブロックを設定することを特徴とする移動体の方向別計数システム。 - 請求項1〜7のいずれかに記載の移動体の方向別計数システムにおいて、
ブロック設定部が、縦にa個、横にb個の画素が並んだ画素配列を含む矩形状のブロックを設定し、
探索領域設定部が、前記画素配列およびその上方、下方、左方、右方にそれぞれ配置された周辺画素配列を包含する矩形状の探索領域を設定することを特徴とする移動体の方向別計数システム。 - 請求項8に記載の移動体の方向別計数システムにおいて、
最類似単位画像決定部が、縦にa個、横にb個の画素が並んだ画素配列を収容可能な候補枠を、探索領域内の配置可能な各位置に配置し、各位置において前記候補枠内の画像を候補単位画像として抽出し、抽出された候補単位画像のうち着目単位画像に最も類似する画像を最類似単位画像と決定することを特徴とする移動体の方向別計数システム。 - 請求項9に記載の移動体の方向別計数システムにおいて、
撮影装置として、三原色R,G,Bの各画素値Pr,Pg,Pbが定義された画素の集合体からなるフレーム画像を収録する装置を用い、
最類似単位画像決定部が、着目単位画像内の第h番目(但し、1≦h≦H,H=a×b)の画素の画素値をPr(h),Pg(h),Pb(h)とし、候補単位画像内の第h番目の画素の画素値をUr(h),Ug(h),Ub(h)としたときに、
ξ = Σh=1〜H (|Pr(h)−Ur(h)|+
|Pg(h)−Ug(h)|+
|Pb(h)−Ub(h)|)
なる式で定義される相違度ξが最小となる候補単位画像を最類似単位画像と決定することを特徴とする移動体の方向別計数システム。 - 請求項10に記載の移動体の方向別計数システムにおいて、
最類似単位画像決定部が、相違度ξの最小値ξminが所定のしきい値ξthに対して、ξmin>ξthである場合には、「最類似単位画像なし」との決定を行い、
変位ベクトル定義部が、「最類似単位画像なし」との決定が行われた特定の着目単位画像については変位ベクトルの定義を行わず、
法線ベクトル定義部が、前記特定の着目単位画像については法線ベクトルの定義を行わず、
ベクトル長集計部が、定義が行われていない法線ベクトルについては長さの集計を行わないことを特徴とする移動体の方向別計数システム。 - 請求項1〜11のいずれかに記載の移動体の方向別計数システムにおいて、
計数値算出部が、オペレータから所定の係数Kもしくは当該係数Kを決定するための情報を入力する機能を有し、ベクトル長集計部が求めた集計値を前記係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力することを特徴とする移動体の方向別計数システム。 - 請求項1〜11のいずれかに記載の移動体の方向別計数システムにおいて、
計数値算出部が、複数通りの係数Kを記憶しており、時刻、日付、曜日、季節もしくは天候に応じて1つの係数Kを選択する機能を有し、ベクトル長集計部が求めた集計値を、選択された係数Kで除した値を移動体の数もしくは量を示す計数値として算出し、これを出力することを特徴とする移動体の方向別計数システム。 - 請求項1〜13のいずれかに記載の移動体の方向別計数システムにおいて、
検出ライン設定部が、検出ラインに沿って重みパラメータを設定する機能を有し、
ベクトル長集計部が、法線ベクトルの長さを集計して集計値を求める際に、個々の法線ベクトルの長さに当該法線ベクトルの位置に対応した重みパラメータを乗じた値の和を求めることを特徴とする移動体の方向別計数システム。 - 請求項14に記載の移動体の方向別計数システムにおいて、
検出ライン設定部が、検出ライン上の2点についての寸法パラメータを指定するオペレータの入力操作を受け、これら2点についての寸法パラメータに基づく線形補間処理により、検出ライン上の任意の位置における重みパラメータを決定することを特徴とする移動体の方向別計数システム。 - 請求項1〜15のいずれかに記載の移動体の方向別計数システムの構成要素として記載された画像解析装置。
- 請求項16に記載の画像解析装置としてコンピュータを機能させるプログラム。
- 請求項16に記載の画像解析装置として機能する半導体集積回路。
- 請求項1〜15のいずれかに記載の移動体の方向別計数システムを備え、撮影装置が所定の搬送路上を流れる物品を撮影できる位置に配置され、画像解析装置が前記搬送路上を流れる物品の個数をカウントする機能を有することを特徴とする移動物品の個数カウントシステム。
- 請求項1〜15のいずれかに記載の移動体の方向別計数システムを備え、送出ロールから送り出されてから巻取ロールで巻き取られるまで、所定の処理経路上を流れる巻取材料を撮影できる位置に撮影装置が配置され、画像解析装置が前記処理経路上を流れる巻取材料の模様パターンをカウントすることにより、巻取材料の搬送量をカウントする機能を有することを特徴とする巻取材料の搬送量カウントシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013143779A JP2015018330A (ja) | 2013-07-09 | 2013-07-09 | 移動体の方向別計数システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013143779A JP2015018330A (ja) | 2013-07-09 | 2013-07-09 | 移動体の方向別計数システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015018330A true JP2015018330A (ja) | 2015-01-29 |
Family
ID=52439281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013143779A Pending JP2015018330A (ja) | 2013-07-09 | 2013-07-09 | 移動体の方向別計数システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015018330A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017188070A (ja) * | 2015-12-11 | 2017-10-12 | アクシス アーベー | モニタリングシステムにおける信頼性を高めるための方法 |
| CN109313806A (zh) * | 2016-06-22 | 2019-02-05 | 索尼公司 | 图像处理装置、图像处理系统、图像处理方法和程序 |
| JP2019082795A (ja) * | 2017-10-30 | 2019-05-30 | キヤノン株式会社 | 情報処理装置、情報処理方法およびプログラム |
| JP2019200590A (ja) * | 2018-05-16 | 2019-11-21 | キヤノン株式会社 | 情報処理装置、撮像装置、情報処理方法及びプログラム |
| JP2020170303A (ja) * | 2019-04-02 | 2020-10-15 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP2021145303A (ja) * | 2020-03-13 | 2021-09-24 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| JP2022081159A (ja) * | 2020-11-19 | 2022-05-31 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 推論装置、学習装置、物体カウント方法、及びプログラム |
| JP2023075380A (ja) * | 2021-11-19 | 2023-05-31 | 株式会社Jems | 廃棄物発生量管理装置、廃棄物発生量管理方法及び廃棄物発生量管理プログラム |
| JP2024043606A (ja) * | 2022-09-20 | 2024-04-02 | 株式会社SoftRoid | 情報処理システム |
-
2013
- 2013-07-09 JP JP2013143779A patent/JP2015018330A/ja active Pending
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017188070A (ja) * | 2015-12-11 | 2017-10-12 | アクシス アーベー | モニタリングシステムにおける信頼性を高めるための方法 |
| CN109313806A (zh) * | 2016-06-22 | 2019-02-05 | 索尼公司 | 图像处理装置、图像处理系统、图像处理方法和程序 |
| JP7123545B2 (ja) | 2017-10-30 | 2022-08-23 | キヤノン株式会社 | 情報処理装置、情報処理方法およびプログラム |
| JP2019082795A (ja) * | 2017-10-30 | 2019-05-30 | キヤノン株式会社 | 情報処理装置、情報処理方法およびプログラム |
| JP2019200590A (ja) * | 2018-05-16 | 2019-11-21 | キヤノン株式会社 | 情報処理装置、撮像装置、情報処理方法及びプログラム |
| JP2020170303A (ja) * | 2019-04-02 | 2020-10-15 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP7418966B2 (ja) | 2019-04-02 | 2024-01-22 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR20210116247A (ko) * | 2020-03-13 | 2021-09-27 | 캐논 가부시끼가이샤 | 화상 처리장치, 화상 처리방법, 및 비일시적인 컴퓨터 판독가능한 기억매체 |
| JP2021145303A (ja) * | 2020-03-13 | 2021-09-24 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| JP7518640B2 (ja) | 2020-03-13 | 2024-07-18 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| KR102872437B1 (ko) | 2020-03-13 | 2025-10-17 | 캐논 가부시끼가이샤 | 화상 처리장치, 화상 처리방법, 및 비일시적인 컴퓨터 판독가능한 기억매체 |
| JP2022081159A (ja) * | 2020-11-19 | 2022-05-31 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 推論装置、学習装置、物体カウント方法、及びプログラム |
| JP7593616B2 (ja) | 2020-11-19 | 2024-12-03 | エヌ・ティ・ティ・コミュニケーションズ株式会社 | 推論装置、物体カウント方法、及びプログラム |
| JP2023075380A (ja) * | 2021-11-19 | 2023-05-31 | 株式会社Jems | 廃棄物発生量管理装置、廃棄物発生量管理方法及び廃棄物発生量管理プログラム |
| JP2024043606A (ja) * | 2022-09-20 | 2024-04-02 | 株式会社SoftRoid | 情報処理システム |
| JP7705152B2 (ja) | 2022-09-20 | 2025-07-09 | 株式会社SoftRoid | 情報処理システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2015018330A (ja) | 移動体の方向別計数システム | |
| Dong et al. | Structural displacement monitoring using deep learning-based full field optical flow methods | |
| Dong et al. | Marker-free monitoring of the grandstand structures and modal identification using computer vision methods | |
| US11003956B2 (en) | System and method for training a neural network for visual localization based upon learning objects-of-interest dense match regression | |
| Li et al. | Building block level urban land-use information retrieval based on Google Street View images | |
| US10880524B2 (en) | System and method for activity monitoring using video data | |
| CN108256431B (zh) | 一种手部位置标识方法及装置 | |
| CN108460362B (zh) | 一种检测人体部位的系统及方法 | |
| CN108154110B (zh) | 一种基于深度学习人头检测的密集人流量统计方法 | |
| CN113743273B (zh) | 基于视频图像目标检测的实时跳绳计数方法、装置和设备 | |
| CN109815843A (zh) | 目标检测方法及相关产品 | |
| CN103063143A (zh) | 基于图像识别的测量方法及其系统 | |
| CN109583366B (zh) | 一种基于视频图像和WiFi定位的体育建筑疏散人群轨迹生成方法 | |
| CN109816745A (zh) | 人体热力图展示方法及相关产品 | |
| CN110503666B (zh) | 一种基于视频的密集人群计数方法与系统 | |
| US9361705B2 (en) | Methods and systems for measuring group behavior | |
| CN109727275A (zh) | 目标检测方法、装置、系统和计算机可读存储介质 | |
| CN109101929A (zh) | 一种行人计数方法及装置 | |
| KR102630546B1 (ko) | 하천의 영상 정보를 활용한 인공지능 기반의 하천 수위 및 유속 계측 방법 및 장치 | |
| CN114565976A (zh) | 一种训练智能测试方法以及装置 | |
| Osigbesan et al. | Vision-based fall detection in aircraft maintenance environment with pose estimation | |
| Sabouri et al. | A novel approach for automatic asphalt pavement crack length estimation | |
| CN109785439A (zh) | 人脸素描图像生成方法及相关产品 | |
| Kröckel et al. | Customer tracking and tracing data as a basis for service innovations at the point of sale | |
| CN116433767B (zh) | 目标对象检测方法、装置、电子设备以及存储介质 |