JP2015100527A - アシストアーム - Google Patents
アシストアーム Download PDFInfo
- Publication number
- JP2015100527A JP2015100527A JP2013243158A JP2013243158A JP2015100527A JP 2015100527 A JP2015100527 A JP 2015100527A JP 2013243158 A JP2013243158 A JP 2013243158A JP 2013243158 A JP2013243158 A JP 2013243158A JP 2015100527 A JP2015100527 A JP 2015100527A
- Authority
- JP
- Japan
- Prior art keywords
- upper arm
- worm gear
- arm
- worm wheel
- assist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Prostheses (AREA)
- Manipulator (AREA)
Abstract
【課題】上腕を上方に上げたまま、あるいは上腕を下方に下げたまま行う作業時において腕をサポートするアシストアームを提供する。【解決手段】アシストアームは、回転するウオームギアを有し、肩に設けた肩部と、肩部のウオームギアと歯合し、回転するウオームホイールを有し、ウオームホイールの回転に応じて回転する上腕部と、上腕部に接して設けられ、上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、を備える。【選択図】図2
Description
本開示は、上腕を上方に上げたまま、あるいは、上腕を下方に下げたまま行う作業時などにおいて、腕を支持するアシストアームに関する。
従来、ロボット技術を応用して、作業時にヒト自身の腕ではなく、作業用アームに大型荷物や重量物を載せて作業を行うための大型の作業用アーム等は数多く研究されている。
また、ヒト自身が作業する際に腰や身体を支持してヒトの負担軽減を行う支援具についての研究開発もいくつか存在する(例えば、特許文献1及び2参照。)。
ヒト自身が行う作業の中には腕を上方に上げたまま、あるいは下方に下げたままで行う作業が比較的多い。このように腕を上げたまま、あるいは下方に下げたままで行う作業では、腕をサポートする支援具が必要とされている。
そこで、本開示の目的は、上腕を上方に上げたまま、あるいは上腕を下方に下げたまま行う作業時において、腕をサポートするアシストアームを提供することである。
本開示に係るアシストアームは、回転するウオームギアを有し、肩に設ける肩部と、
前記肩部の前記ウオームギアと歯合し、回転するウオームホイールを有し、前記ウオームホイールの回転に応じて回転する上腕部と、
前記上腕部に接して設けられ、前記上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、
を備える。
前記肩部の前記ウオームギアと歯合し、回転するウオームホイールを有し、前記ウオームホイールの回転に応じて回転する上腕部と、
前記上腕部に接して設けられ、前記上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、
を備える。
本開示に係るアシストアームによれば、上腕を上方に上げたまま、あるいは、上腕を下方に下げたままの作業時において、上腕支持部によって肘を支えることができる。また、作業時の上腕の水平に対する角度調整を容易に行うことができる。これによって、上腕を上方に上げたまま、あるいは上腕を下方に下げたまま行う作業時において、腕をサポートすることができる。
本開示の第1の態様に係るアシストアームは、回転するウオームギアを有し、肩に設ける肩部と、
前記肩部の前記ウオームギアと歯合し、回転するウオームホイールを有し、前記ウオームホイールの回転に応じて回転する上腕部と、
前記上腕部に接して設けられ、前記上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、
を備える。
前記肩部の前記ウオームギアと歯合し、回転するウオームホイールを有し、前記ウオームホイールの回転に応じて回転する上腕部と、
前記上腕部に接して設けられ、前記上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、
を備える。
上記第1の態様に係るアシストアームによれば、上腕をあげたまま、あるいは、上腕をさげたままの作業時において、上腕支持部によって肘を支えることができる。また、作業時の上腕の水平に対する角度調整を容易に行うことができる。そこで、上腕を上方に上げたまま、あるいは上腕を下方にさげたまま行う作業時において、腕をサポートすることができる。
第2の態様に係るアシストアームは、上記第1の態様において、前記ウオームホイールは、周方向に沿って少なくとも一定範囲に、前記ウオームギアと歯合する歯を有してもよい。
上記第2の態様に係るアシストアームによれば、ウオームギアと歯合する歯を有する一定範囲において、ウオームギアとウオームホイールとが歯合し、上腕部を保持できる。一方、ウオームギアと歯合する歯を有する一定範囲から外れた場合には、ウオームギアとウオームホイールとの歯合が外れるので、上腕部がフリーとなる。これによって、作業時に所望の自由度を得ることができる。
第3の態様に係るアシストアームは、上記第1の態様において、前記ウオームホイールは、周方向に沿って互いに離間した複数の連続する範囲に、前記ウオームギアと歯合する歯を有してもよい。
上記第3の態様に係るアシストアームによれば、ウオームギアと歯合する歯を有する範囲において、ウオームギアとウオームホイールとが歯合し、上腕部を保持できる。一方、ウオームギアと歯合する歯を有する範囲から外れた場合には、ウオームギアとウオームホイールとの歯合が外れるので、上腕部がフリーとなる。これによって、作業時に所望の自由度を得ることができる。
第4の態様に係るアシストアームは、上記第1から第3のいずれかの態様において、前記ウオームホイールは、前記ウオームギアとの歯合が外れるように、前記ウオームギアから離れる方向に移動可能に設けられていてもよい。
上記第4の態様に係るアシストアームによれば、ウオームホイールをウオームギアから離れる方向に移動させることによって、ウオームギアとウオームホイールとの歯合が外れるので、上腕部がフリーとなる。これによって、作業時に所望の自由度を得ることができる。
第5の態様に係るアシストアームは、上記第1から第4のいずれかの態様において、前記ウオームホイールは、水平軸について鉛直面に平行な面内で回転してもよい。
第6の態様に係るアシストアームは、上記第1から第5のいずれかの態様において、前記ウオームギアを回転させるモータをさらに備えてもよい。
上記第6の態様に係るアシストアームによれば、ウオームギアを回転させるモータを有するので、安定してウオームギアを回転させることができ、上腕を支持できる。
第7の態様に係るアシストアームは、上記第6の態様において、前記上腕部の端部に前腕に沿って回転可能に接続され、前腕を挟むように設けられた前腕部をさらに備えてもよい。
上記第7の態様に係るアシストアームによれば、前腕を挟んで設けられた前腕部を有するので、上腕に対する前腕の角度を一定にして作業できる。
第8の態様に係るアシストアームは、上記第7の態様において、前記前腕部は、前腕と対向する内側の上下のそれぞれに前記上腕支持部を上下させるように前記モータを回転させるスイッチとなる入力用センサを備えてもよい。
上記第8の態様に係るアシストアームによれば、前腕部の入力センサによって上方向又は下方向に入力できるので、手がふさがっている場合でもわずかな動作によって上下方向の動きを入力できる。
第9の態様に係るアシストアームは、上記第1から第8のいずれかの態様において、背面に固定され、肩の回転に合わせて前記肩部を回動自在に支持する背面部材をさらに備えてもよい。
上記第9の態様によれば、肩の回転に合わせて前記肩部を回動自在に支持する背面部材をさらに備えるので、肩を回転させた場合にも肩部を肩の動きに合わせて回動させることができる。
以下、本開示の実施の形態に係るアシストアームについて、添付図面を参照しながら説明する。なお、図面において実質的に同一の部材については同一の符号を付している。
(実施の形態1)
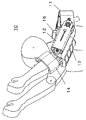
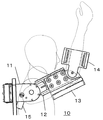
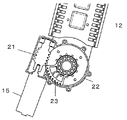
図1は、実施の形態1に係るアシストアーム10を左腕に装着した状態を示す概略図である。図2は、実施の形態1に係るアシストアーム10の全体構成を示す概略図である。図3は、両腕にアシストアーム10、10aを設けた場合を示す概略図である。図4は、実施の形態1に係るアシストアーム10のウオームギア21とウオームホイール22との歯合状態を示す断面図である。図5は、実施の形態1に係るアシストアーム10の内側方向から見た概略図である。図6は、実施の形態1に係るアシストアーム10によって肘を支えている状態を示す概略図である。
図1は、実施の形態1に係るアシストアーム10を左腕に装着した状態を示す概略図である。図2は、実施の形態1に係るアシストアーム10の全体構成を示す概略図である。図3は、両腕にアシストアーム10、10aを設けた場合を示す概略図である。図4は、実施の形態1に係るアシストアーム10のウオームギア21とウオームホイール22との歯合状態を示す断面図である。図5は、実施の形態1に係るアシストアーム10の内側方向から見た概略図である。図6は、実施の形態1に係るアシストアーム10によって肘を支えている状態を示す概略図である。
実施の形態1に係るアシストアーム10は、肩部11と、上腕部12と、上腕支持部13と、を備える。なお、前腕部14をさらに備えてもよい。肩部11は、回転するウオームギア21を有し、肩に沿って設ける。上腕部12は、肩部11のウオームギア21と歯合し、回転するウオームホイール22を有し、ウオームホイール22の回転に応じて回転する。上腕支持部13は、上腕部12に接して設けられ、上腕部12の回転に伴って上下すると共に、上腕を支持する。なお、添付図面では、左腕に装着するアシストアーム10のみを示しているが、これに限られず、例えば、図3に示すように右腕に装着するアシストアーム10aであってもよい。さらに、両腕のそれぞれに装着するアシストアーム10,10aとしてもよい。この場合には、肩部11、11aをそれぞれの腕のアシストアーム10,10aについて設けてもよい。あるいは、両腕のアシストアーム10、10aに共通の背面部材16を設け、この背面部材16について、両腕のアシストアーム10、10aのそれぞれの肩部11、11aを、左右それぞれの肩の回転に沿って回転軸17、17aについて回動自在に設けてもよい。
(効果)
このアシストアーム10によれば、図5及び図6に示すように、上腕を上方に上げたまま、あるいは、上腕を下方に下げたままの作業時に上腕支持部13によって肘を支えることができる。また、作業時の上腕の水平に対する角度調整を容易に行うことができる。そこで、腕を上げたまま、あるいは下方にさげたまま行う作業時において腕をサポートすることができる。
このアシストアーム10によれば、図5及び図6に示すように、上腕を上方に上げたまま、あるいは、上腕を下方に下げたままの作業時に上腕支持部13によって肘を支えることができる。また、作業時の上腕の水平に対する角度調整を容易に行うことができる。そこで、腕を上げたまま、あるいは下方にさげたまま行う作業時において腕をサポートすることができる。
(本開示の一形態に至った経緯)
上述のように腕を上げたまま、あるいは下方に下げたままで行う作業では、腕の上下についてある程度の自由度が必要とされる。本発明者は、従来の場合及び上記の場合には、腕を上げたまま、あるいは下方に下げたままで行う作業についてサポートできるが、腕の上下における自由度がなお十分ではないという課題を見出し、以下の本開示の一形態に至った。
本開示の一形態では、ウオームホイール22の周方向に沿って一定範囲に、ウオームギア21と歯合する歯23を有する。
本開示の他の形態では、ウオームホイール22の周方向に沿って互いに離間した複数の連続する範囲に、ウオームギア21と歯合する歯23を有する。
本開示のさらに他の形態では、ウオームホイール22は、ウオームギア21との歯合が外れるように、ウオームギア21から離れる方向に移動可能に設けられている。
上述のように腕を上げたまま、あるいは下方に下げたままで行う作業では、腕の上下についてある程度の自由度が必要とされる。本発明者は、従来の場合及び上記の場合には、腕を上げたまま、あるいは下方に下げたままで行う作業についてサポートできるが、腕の上下における自由度がなお十分ではないという課題を見出し、以下の本開示の一形態に至った。
本開示の一形態では、ウオームホイール22の周方向に沿って一定範囲に、ウオームギア21と歯合する歯23を有する。
本開示の他の形態では、ウオームホイール22の周方向に沿って互いに離間した複数の連続する範囲に、ウオームギア21と歯合する歯23を有する。
本開示のさらに他の形態では、ウオームホイール22は、ウオームギア21との歯合が外れるように、ウオームギア21から離れる方向に移動可能に設けられている。
以上のそれぞれの形態によって、ウオームギア21と歯合する歯を有する一定範囲において、ウオームギア21とウオームホイール22とが歯合し、上腕部12を保持できる。一方、ウオームギア21と歯合する歯を有する一定範囲から外れた場合には、ウオームギア21とウオームホイール22との歯合が外れるので、上腕部12がフリーとなる。あるいは、ウオームホイール22をウオームギア21から離れる方向に移動させることによって、ウオームギア21とウオームホイール22との歯合が外れるので、上腕部12がフリーとなる。これによって、作業時に所望の自由度を得ることができる。例えば、上腕を一定角度よりさらに上方に上げることができる。あるいは、上腕を一定角度よりさらに下方に下げることができる。
以下に、本開示に係るアシストアーム10を構成する各構成部材について説明する。
<肩部>
肩部11は、肩に設ける。肩部11は、回転するウオームギア21を有する。肩部11は、ウオームギア21及びウオームホイール22を介して接続された上腕部12を支持できる構成であればよい。ウオームギア21は、モータ15によって回転させることができる。なお、上述のように、両腕にアシストアーム10、10aを装着する場合には、肩部11、11aをそれぞれの腕のアシストアーム10、10aについて設けてもよい。あるいは、両腕のアシストアーム10、10aの肩部11、11aを接続する共通の背面部材16を設け、この背面部材16について、両腕のアシストアーム10、10aのそれぞれの肩部11、11aを、左右それぞれの肩の回転に沿って回転軸17、17aについて回動自在に設けてもよい。
肩部11は、肩に設ける。肩部11は、回転するウオームギア21を有する。肩部11は、ウオームギア21及びウオームホイール22を介して接続された上腕部12を支持できる構成であればよい。ウオームギア21は、モータ15によって回転させることができる。なお、上述のように、両腕にアシストアーム10、10aを装着する場合には、肩部11、11aをそれぞれの腕のアシストアーム10、10aについて設けてもよい。あるいは、両腕のアシストアーム10、10aの肩部11、11aを接続する共通の背面部材16を設け、この背面部材16について、両腕のアシストアーム10、10aのそれぞれの肩部11、11aを、左右それぞれの肩の回転に沿って回転軸17、17aについて回動自在に設けてもよい。
<上腕部及び上腕支持部>
上腕部12は、肩部11のウオームギア21と歯合し、回転するウオームホイール22を有する。なお、ウオームホイール22は、水平軸について鉛直面に平行な面内で回転してもよい。あるいは、鉛直面から傾斜した面内で回転してもよい。また、上腕部12には、上腕を支持する上腕支持部13を備える。上腕部12は、ウオームホイール22の回転に応じて回転し、上腕支持部13は上腕部12の回転に伴って上下する。上腕部12のウオームホイール22は、周方向に沿って少なくとも一定範囲に、ウオームギア21と歯合する歯23を有する。あるいは、ウオームホイール22の周方向に沿って互いに離間した複数の連続する範囲に、ウオームギア21と歯合する歯23を有するように構成してもよい。
上腕部12は、肩部11のウオームギア21と歯合し、回転するウオームホイール22を有する。なお、ウオームホイール22は、水平軸について鉛直面に平行な面内で回転してもよい。あるいは、鉛直面から傾斜した面内で回転してもよい。また、上腕部12には、上腕を支持する上腕支持部13を備える。上腕部12は、ウオームホイール22の回転に応じて回転し、上腕支持部13は上腕部12の回転に伴って上下する。上腕部12のウオームホイール22は、周方向に沿って少なくとも一定範囲に、ウオームギア21と歯合する歯23を有する。あるいは、ウオームホイール22の周方向に沿って互いに離間した複数の連続する範囲に、ウオームギア21と歯合する歯23を有するように構成してもよい。
図7は、アシストアーム10の上腕部12の上方向への回転によってウオームギア21とウオームホイール22との歯合が外れた状態を示す断面図である。図8は、アシストアーム10の上腕部12の下方向への回転によってウオームギア21とウオームホイール22との歯合が外れた状態を示す断面図である。
例えば、ウオームホイール22の周方向に沿って一定範囲でウオームギア21と歯合する歯を有する場合について説明する。具体的には、ウオームギア21とウオームホイール22とが歯合する範囲が、上腕部12が水平に対して50°〜80°となる範囲と対応する場合である。
図7に示すように、水平に対して上腕部のなす角度θが80°以上になると、ウオームホイール22の歯部分がウオームギア21の歯から外れる。これによってウオームホイール22がフリーになる。その結果、上腕部12及び上腕支持部13もフリーになる。この場合、角度が80°以上の場合には、上腕部12がフリーとなり、ヒトの上腕も自由となる。このため、制限なくより高いところに上腕を伸ばすことができる。なお、いったん角度が80°を超えた場合、80°以下の角度に戻すためにはウオームギア21を回転させてウオームギア21とウオームホイール22とを再び歯合させる必要がある。
図7に示すように、水平に対して上腕部のなす角度θが80°以上になると、ウオームホイール22の歯部分がウオームギア21の歯から外れる。これによってウオームホイール22がフリーになる。その結果、上腕部12及び上腕支持部13もフリーになる。この場合、角度が80°以上の場合には、上腕部12がフリーとなり、ヒトの上腕も自由となる。このため、制限なくより高いところに上腕を伸ばすことができる。なお、いったん角度が80°を超えた場合、80°以下の角度に戻すためにはウオームギア21を回転させてウオームギア21とウオームホイール22とを再び歯合させる必要がある。
また、図8に示すように、水平に対して上腕部12のなす角度θが50°以下になると、ウオームホイール22の歯部分がウオームギアの歯から外れる。これによってウオームホイール22がフリーになる。その結果、上腕部12及び上腕支持部13もフリーになる。この場合、角度が50°以下の場合についてフリーとなり、ヒトの上腕も自由となる。このため、制限なくより低いところに上腕を伸ばすことができる。なお、いったん角度が50°未満となった場合、50°以上の角度に戻すためにはウオームギア21を回転させてウオームギア21とウオームホイール22とを再び歯合させる必要がある。
上記構成によって、水平に対して上腕部12のなす角度θが50°〜80°の範囲において、ウオームギア21とウオームホイール22との歯合によって、肩部11に対して上腕部12を固定できる。その結果、上腕支持部13によって上腕をしっかりと支持できる。
一方、上記角度範囲以外の角度、50°以下又は80°以上では、ウオームギア21とウオームホイール22とが歯合せず、上腕支持部13をフリーな状態とすることができる。これによって、50°以下又は80°以上の角度では、上腕を固定することなく自由に動かすことができる。例えば、上方での作業時にも高い自由度で行うことができる。
なお、上記角度範囲は一例であって、これに限定されるものではない。例えば、ウオームホイール22は、周方向に沿って互いに離間した複数の連続する範囲について、ウオームギア21と歯合する歯を有してもよい。この場合、複数の連続する範囲の間の歯を有しない角度範囲において高い自由度で作業をおこなうことができる。
一方、上記角度範囲以外の角度、50°以下又は80°以上では、ウオームギア21とウオームホイール22とが歯合せず、上腕支持部13をフリーな状態とすることができる。これによって、50°以下又は80°以上の角度では、上腕を固定することなく自由に動かすことができる。例えば、上方での作業時にも高い自由度で行うことができる。
なお、上記角度範囲は一例であって、これに限定されるものではない。例えば、ウオームホイール22は、周方向に沿って互いに離間した複数の連続する範囲について、ウオームギア21と歯合する歯を有してもよい。この場合、複数の連続する範囲の間の歯を有しない角度範囲において高い自由度で作業をおこなうことができる。
<前腕部>
前腕部14は、前腕を挟むように設けてもよい。なお、前腕部14は、上腕部12に対して任意の角度に固定可能としてもよい。この場合、連続的に角度を可変としてもよく、あるいは、段階的に角度を可変としてもよい。また、この前腕部14には、前腕と対向する内側の上下それぞれに入力用センサ31、32を備えている。入力用センサ31、32は、肩部11のウオームギア21を駆動するモータ15の回転のオン/オフを行うものであればよい。例えば、上下それぞれの入力用センサ31、32のいずれかをタッチすることによって、モータ15の回転方向を上方向又は下方向のいずれかを選択できる。両手がふさがった状態であっても前腕のわずかな動きで入力用センサ31、32をタッチしてモータ15の回転を制御できる。これによって、ウオームギア21を回転させ、ウオームホイール22に回転を伝達して、上腕部12を回転させ、上腕支持部13を上下させることができる。
なお、入力用センサ31、32は、例えば、感圧センサ、静電容量型センサ、光センサ等の様々なセンサを利用できる。また、上記の例に限られず、例えば、前腕に電気的接点を貼付しておき、前腕を動かして前腕部14の対応する箇所の接点と電気的に接触させることによって入力する電気的スイッチによって入力用センサを構成してもよい。
前腕部14は、前腕を挟むように設けてもよい。なお、前腕部14は、上腕部12に対して任意の角度に固定可能としてもよい。この場合、連続的に角度を可変としてもよく、あるいは、段階的に角度を可変としてもよい。また、この前腕部14には、前腕と対向する内側の上下それぞれに入力用センサ31、32を備えている。入力用センサ31、32は、肩部11のウオームギア21を駆動するモータ15の回転のオン/オフを行うものであればよい。例えば、上下それぞれの入力用センサ31、32のいずれかをタッチすることによって、モータ15の回転方向を上方向又は下方向のいずれかを選択できる。両手がふさがった状態であっても前腕のわずかな動きで入力用センサ31、32をタッチしてモータ15の回転を制御できる。これによって、ウオームギア21を回転させ、ウオームホイール22に回転を伝達して、上腕部12を回転させ、上腕支持部13を上下させることができる。
なお、入力用センサ31、32は、例えば、感圧センサ、静電容量型センサ、光センサ等の様々なセンサを利用できる。また、上記の例に限られず、例えば、前腕に電気的接点を貼付しておき、前腕を動かして前腕部14の対応する箇所の接点と電気的に接触させることによって入力する電気的スイッチによって入力用センサを構成してもよい。
<背面部材>
このアシストアーム10は、背面に固定される背面部材16を備えてもよい。図3に示すように、背面部材16は、背面に固定され、回転軸17について肩部11が回動自在となるように肩部11を支持する。これによって肩を回転させた場合にも肩部11を肩の動きに合わせて回動させることができる。なお、肩の回転とは、例えば、図3の例では回転軸17についての左右への回転である。
また、図3では、一例として、左腕だけでなく右腕にもアシストアーム10aを設けている場合を示している。この場合には、背面部材16は、右腕のアシストアーム10aについても、回転軸17aについて肩部11aが回動自在となるように肩部11aを支持している。
このアシストアーム10は、背面に固定される背面部材16を備えてもよい。図3に示すように、背面部材16は、背面に固定され、回転軸17について肩部11が回動自在となるように肩部11を支持する。これによって肩を回転させた場合にも肩部11を肩の動きに合わせて回動させることができる。なお、肩の回転とは、例えば、図3の例では回転軸17についての左右への回転である。
また、図3では、一例として、左腕だけでなく右腕にもアシストアーム10aを設けている場合を示している。この場合には、背面部材16は、右腕のアシストアーム10aについても、回転軸17aについて肩部11aが回動自在となるように肩部11aを支持している。
(実施例)
以下に、実施例におけるアシストアーム10の動作について説明する。
(1)前腕部14の上下に設けた入力用センサ31、32を操作者が前腕によって、上方向又は下方向にタッチする。
(2)前腕部14の入力用センサ31、32への入力(ON/OFF、アナログ値)に応じて、モータ15が回転し、ウオームギア21を回転させる。
(3)ギアボックス内にて、ウオームギア21とウオームホイール22とが歯合し、ウオームギア21の回転に伴ってウオームホイール22が回転し、上腕部12が上方又は下方に回転する。
(4)上腕部12の回転に伴って、上腕支持部13が上下する。
これによって、このアシストアーム10によれば、上腕支持部13で肘及び上腕を支持しながら、上下させることができる。また、ウオームギア21を回転させることによって水平に対して上腕を所望の角度に設定することができる。
以下に、実施例におけるアシストアーム10の動作について説明する。
(1)前腕部14の上下に設けた入力用センサ31、32を操作者が前腕によって、上方向又は下方向にタッチする。
(2)前腕部14の入力用センサ31、32への入力(ON/OFF、アナログ値)に応じて、モータ15が回転し、ウオームギア21を回転させる。
(3)ギアボックス内にて、ウオームギア21とウオームホイール22とが歯合し、ウオームギア21の回転に伴ってウオームホイール22が回転し、上腕部12が上方又は下方に回転する。
(4)上腕部12の回転に伴って、上腕支持部13が上下する。
これによって、このアシストアーム10によれば、上腕支持部13で肘及び上腕を支持しながら、上下させることができる。また、ウオームギア21を回転させることによって水平に対して上腕を所望の角度に設定することができる。
(変形例)
図9は、変形例に係るアシストアームの上腕部12を前方に移動させることによって、ウオームギア21とウオームホイール22との歯合が外れた状態を示す断面図である。この変形例に係るアシストアームでは、上記実施の形態1に係るアシストアームと対比すると、ウオームホイール22は、ウオームギア21との歯合が外れるように、ウオームギア21から離れる方向に移動可能に設けられている点で相違する。このように、ウオームギア21とウオームホイール22とを歯合させた状態から、ウオームホイール22をウオームギア21から離れる方向に移動させて、ウオームギア21とウオームホイール22との歯合を外して、ウオームホイール22をフリーにできる。この場合、図9に示すように、ウオームホイール22の歯23は、周方向の全範囲に設けてもよい。あるいは、図4に示すように、周方向の一部の範囲に歯23を設けてもよい。
図9は、変形例に係るアシストアームの上腕部12を前方に移動させることによって、ウオームギア21とウオームホイール22との歯合が外れた状態を示す断面図である。この変形例に係るアシストアームでは、上記実施の形態1に係るアシストアームと対比すると、ウオームホイール22は、ウオームギア21との歯合が外れるように、ウオームギア21から離れる方向に移動可能に設けられている点で相違する。このように、ウオームギア21とウオームホイール22とを歯合させた状態から、ウオームホイール22をウオームギア21から離れる方向に移動させて、ウオームギア21とウオームホイール22との歯合を外して、ウオームホイール22をフリーにできる。この場合、図9に示すように、ウオームホイール22の歯23は、周方向の全範囲に設けてもよい。あるいは、図4に示すように、周方向の一部の範囲に歯23を設けてもよい。
なお、ウオームホイール22は、上記のように、ウオームギア21から離れる方向に移動可能に設けられているだけではなく、逆に、ウオームギア21と歯合するようにウオームギア21に向かう方向に移動可能に設けられている。これによって、ウオームギア21との歯合とその解除とを自在に行うことができる。この場合、水平に対する上腕部12の角度にかかわらずウオームギア21とウオームホイール22との歯合とその解除を行うことができ、さらに作業時の自由度を高めることができる。
ウオームホイール22をウオームギア21から離れる方向又はウオームギア21に向かう方向に移動させる方法としては、例えば、前腕部14の左右に別の入力用センサを設けて制御してもよい。この場合、前腕を左右に動かして左右の入力用センサをタッチしてウオームホイール22の移動を制御してもよい。なお、ウオームホイール22の移動によって、上腕部12及び上腕支持部13のフリー状態を制御することとなるので、確実な入力のために、ウオームホイール22の移動は、左右の入力用センサへの複数回の入力によって行うようにしてもよい。
本開示に係るアシストアームによれば、上腕を上方に上げたまま、あるいは、上腕を下方に下げたままの作業時に上腕支持部によって肘を支えることができる。また、作業時の上腕の水平に対する角度調整を容易に行うことができる。そこで、上腕を上方に上げたまま、あるいは上腕を下方に下げたまま行う作業時において腕をサポートすることができる。そのため、上腕を上方に上げたまま、あるいは、上腕を下方に下げたままの作業をサポートするアシストアーム、支援装着具などの用途に有用である。
10、10a アシストアーム
11、11a 肩部
12、12a 上腕部
13 上腕支持部
14、14a 前腕部
15、15a モータ
16 背面部材
17、17a 回転軸
21 ウオームギア
22 ウオームホイール
23 歯
31、32 入力用センサ
11、11a 肩部
12、12a 上腕部
13 上腕支持部
14、14a 前腕部
15、15a モータ
16 背面部材
17、17a 回転軸
21 ウオームギア
22 ウオームホイール
23 歯
31、32 入力用センサ
Claims (9)
- 回転するウオームギアを有し、肩に設けた肩部と、
前記肩部の前記ウオームギアと歯合し、回転するウオームホイールを有し、前記ウオームホイールの回転に応じて回転する上腕部と、
前記上腕部に接して設けられ、前記上腕部の回転に伴って上下すると共に、上腕を支持する上腕支持部と、
を備えた、アシストアーム。 - 前記ウオームホイールは、周方向に沿って少なくとも一定範囲に、前記ウオームギアと歯合する歯を有する、請求項1に記載のアシストアーム。
- 前記ウオームホイールは、周方向に沿って互いに離間した複数の連続する範囲に、前記ウオームギアと歯合する歯を有する、請求項1に記載のアシストアーム。
- 前記ウオームホイールは、前記ウオームギアとの歯合が外れるように、前記ウオームギアから離れる方向に移動可能に設けられている、請求項1から3のいずれか一項に記載のアシストアーム。
- 前記ウオームホイールは、水平軸について鉛直面に平行な面内で回転する、請求項1から4のいずれか一項に記載のアシストアーム。
- 前記ウオームギアを回転させるモータをさらに備える、請求項1から5のいずれか一項に記載のアシストアーム。
- 前記上腕部の端部に前腕に沿って回転可能に接続され、前腕を挟むように設けられた前腕部をさらに備えた請求項6に記載のアシストアーム。
- 前記前腕部は、前腕と対向する内側の上下のそれぞれに前記上腕支持部を上下させるように前記モータを回転させるスイッチとなる入力用センサを備えた請求項7に記載のアシストアーム。
- 背面に固定され、肩の回転に合わせて前記肩部を回動自在に支持する背面部材をさらに備える、請求項1から8のいずれか一項に記載のアシストアーム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013243158A JP2015100527A (ja) | 2013-11-25 | 2013-11-25 | アシストアーム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013243158A JP2015100527A (ja) | 2013-11-25 | 2013-11-25 | アシストアーム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015100527A true JP2015100527A (ja) | 2015-06-04 |
Family
ID=53376773
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013243158A Pending JP2015100527A (ja) | 2013-11-25 | 2013-11-25 | アシストアーム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015100527A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017170618A1 (ja) * | 2016-03-30 | 2017-10-05 | 国立大学法人 香川大学 | 筋力補助装置 |
| WO2017222052A1 (ja) * | 2016-06-23 | 2017-12-28 | 国立大学法人 香川大学 | 筋力補助装置 |
| JP2018043297A (ja) * | 2016-09-12 | 2018-03-22 | サンコール株式会社 | 上腕補助装置 |
| KR101896181B1 (ko) * | 2017-04-25 | 2018-09-07 | 서울대학교산학협력단 | 어깨 움직임 보조 기구 |
| CN109070355A (zh) * | 2016-03-30 | 2018-12-21 | 国立大学法人香川大学 | 肌力辅助装置 |
| CN110538015A (zh) * | 2019-09-06 | 2019-12-06 | 山东科技大学 | 一种机械假肢手臂 |
| KR102062998B1 (ko) * | 2015-11-20 | 2020-01-06 | 가부시끼 가이샤 구보다 | 어시스트 슈트 |
| JP2020066110A (ja) * | 2018-10-25 | 2020-04-30 | 国立大学法人千葉大学 | 作業補助器具の制御方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001520915A (ja) * | 1997-10-24 | 2001-11-06 | ロシアン プライマリー ケア エヌエイチエス トラスト | 人工上肢 |
| WO2010095619A1 (ja) * | 2009-02-19 | 2010-08-26 | 国立大学法人岐阜大学 | 装着型動作支援装置 |
| JP2010188018A (ja) * | 2009-02-19 | 2010-09-02 | Gifu Univ | 装着型動作支援装置 |
| WO2011145643A1 (ja) * | 2010-05-20 | 2011-11-24 | 国立大学法人 鹿児島大学 | 膝関節パワーアシスト装置 |
| JP2013176429A (ja) * | 2012-02-28 | 2013-09-09 | Univ Of Tsukuba | 多自由度補助装置 |
-
2013
- 2013-11-25 JP JP2013243158A patent/JP2015100527A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001520915A (ja) * | 1997-10-24 | 2001-11-06 | ロシアン プライマリー ケア エヌエイチエス トラスト | 人工上肢 |
| WO2010095619A1 (ja) * | 2009-02-19 | 2010-08-26 | 国立大学法人岐阜大学 | 装着型動作支援装置 |
| JP2010188018A (ja) * | 2009-02-19 | 2010-09-02 | Gifu Univ | 装着型動作支援装置 |
| WO2011145643A1 (ja) * | 2010-05-20 | 2011-11-24 | 国立大学法人 鹿児島大学 | 膝関節パワーアシスト装置 |
| JP2013176429A (ja) * | 2012-02-28 | 2013-09-09 | Univ Of Tsukuba | 多自由度補助装置 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102062998B1 (ko) * | 2015-11-20 | 2020-01-06 | 가부시끼 가이샤 구보다 | 어시스트 슈트 |
| CN108883535A (zh) * | 2016-03-30 | 2018-11-23 | 国立大学法人香川大学 | 肌力辅助装置 |
| EP3437808A4 (en) * | 2016-03-30 | 2019-12-25 | National University Corporation Kagawa University | MUSCLE POWER SUPPORT DEVICE |
| EP3437809A4 (en) * | 2016-03-30 | 2020-05-06 | National University Corporation Kagawa University | MUSCLE STRENGTH SUPPORT DEVICE |
| WO2017170618A1 (ja) * | 2016-03-30 | 2017-10-05 | 国立大学法人 香川大学 | 筋力補助装置 |
| CN109070355A (zh) * | 2016-03-30 | 2018-12-21 | 国立大学法人香川大学 | 肌力辅助装置 |
| JPWO2017170618A1 (ja) * | 2016-03-30 | 2019-02-07 | 国立大学法人 香川大学 | 筋力補助装置 |
| CN109311167A (zh) * | 2016-06-23 | 2019-02-05 | 国立大学法人香川大学 | 肌力辅助装置 |
| EP3476551A4 (en) * | 2016-06-23 | 2019-12-25 | National University Corporation Kagawa University | MUSCLE POWER SUPPORT DEVICE |
| JPWO2017222052A1 (ja) * | 2016-06-23 | 2019-04-11 | 国立大学法人 香川大学 | 筋力補助装置 |
| WO2017222052A1 (ja) * | 2016-06-23 | 2017-12-28 | 国立大学法人 香川大学 | 筋力補助装置 |
| JP2018043297A (ja) * | 2016-09-12 | 2018-03-22 | サンコール株式会社 | 上腕補助装置 |
| KR101896181B1 (ko) * | 2017-04-25 | 2018-09-07 | 서울대학교산학협력단 | 어깨 움직임 보조 기구 |
| JP2020066110A (ja) * | 2018-10-25 | 2020-04-30 | 国立大学法人千葉大学 | 作業補助器具の制御方法 |
| CN110538015A (zh) * | 2019-09-06 | 2019-12-06 | 山东科技大学 | 一种机械假肢手臂 |
| CN110538015B (zh) * | 2019-09-06 | 2021-07-02 | 山东科技大学 | 一种机械假肢手臂 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2015100527A (ja) | アシストアーム | |
| JP5921228B2 (ja) | 起立動作支援ロボット | |
| CN103830025B (zh) | 具有力位及触觉感知功能的两自由度模块化假手拇指 | |
| CN104385295B (zh) | 基于并联差分驱动关节的七自由度仿人机械臂 | |
| JP6659035B2 (ja) | 多方向駆動装置及び自動カメラ | |
| KR101628397B1 (ko) | 착용식 로봇의 어깨관절 구조체 | |
| KR101435565B1 (ko) | 착용형 로봇 및 그 제어방법 | |
| JP2009050987A (ja) | ロボット及びその制御方法 | |
| JP2013166222A (ja) | ロボット制御装置、ロボット制御方法およびロボット制御プログラムならびにロボットシステム | |
| JP6345119B2 (ja) | 介護用ベッドおよびその形状変更方法 | |
| CN209301641U (zh) | 主动式下肢矫形器链接驱动器 | |
| CN103705323A (zh) | 具有自锁功能的电机内置式模块化假手指 | |
| WO2015199137A1 (ja) | 介護用ベッド | |
| CN202834612U (zh) | 显示器支架 | |
| JP2018080717A (ja) | 複数方向駆動装置、ロボット関節機構及び複数方向駆動方法 | |
| CN105881582A (zh) | 一种可空间摆动的六轴工业机器人手腕 | |
| JP2018198863A (ja) | 電動車椅子操作装置及びその車両操作方法 | |
| US12459132B2 (en) | Remote control device | |
| JP2005297168A (ja) | 遠隔操作ロボット | |
| JP4249530B2 (ja) | パラレルメカニズム利用の位置決め装置 | |
| KR101315769B1 (ko) | 4절 링크를 이용한 착용로봇 | |
| CN113110142A (zh) | 一种随动式遥控操作台及其遥控方法 | |
| KR101979707B1 (ko) | 착용로봇의 팔 장치 | |
| JP2008260089A (ja) | 関節機構 | |
| CN202122677U (zh) | 二自由度差动外骨骼 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170808 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180220 |