JP2015100871A - アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 - Google Patents
アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 Download PDFInfo
- Publication number
- JP2015100871A JP2015100871A JP2013242409A JP2013242409A JP2015100871A JP 2015100871 A JP2015100871 A JP 2015100871A JP 2013242409 A JP2013242409 A JP 2013242409A JP 2013242409 A JP2013242409 A JP 2013242409A JP 2015100871 A JP2015100871 A JP 2015100871A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- axis
- arm mechanism
- measuring machine
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 12
- 238000012937 correction Methods 0.000 title claims description 7
- 239000000523 sample Substances 0.000 claims abstract description 63
- 238000012545 processing Methods 0.000 claims abstract description 25
- 238000005452 bending Methods 0.000 claims description 11
- 229920000049 Carbon (fiber) Polymers 0.000 claims description 5
- 239000004917 carbon fiber Substances 0.000 claims description 5
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 claims description 5
- 238000005259 measurement Methods 0.000 abstract description 5
- 239000011159 matrix material Substances 0.000 description 20
- 230000009466 transformation Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
- G01B5/008—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points using coordinate measuring machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/226—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to manipulators, e.g. the force due to gripping
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39186—Flexible joint
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40586—6-DOF force sensor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40599—Force, torque sensor integrated in joint
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Manipulator (AREA)
Abstract
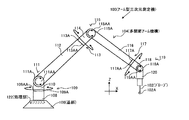
【解決手段】先端にプローブ102を備える多関節アーム機構104と、プローブ102の位置を演算する処理部122と、を有し、プローブ102が手動移動されるアーム型三次元測定機100であって、多関節アーム機構104の各軸に設けられ、多関節アーム機構104の姿勢状態で生じる所定の3方向の力及び所定の3軸方向のトルクを検出する6軸力覚センサa(109AA)〜6軸力覚センサf(119AA)を備え、処理部122は、6軸力覚センサa(109AA)〜6軸力覚センサf(119AA)の出力に基づき多関節アーム機構104の各軸における撓み量を演算し、撓み量に基づきプローブ102の位置を逐次演算する。
【選択図】図1
Description

102…プローブ
102A…プローブ先端
104…多関節アーム機構
106…基部
108、110、112、114、116、118、120…リンク
109、111、113、115、117、119…関節
109A、111A、113A、115A、117A、119A…エンコーダ
109AA、111AA、113AA、115AA、117AA、119AA…6軸力覚センサ
122…処理部
122A…演算部
122B…記憶部
Claims (4)
- 先端にプローブを備える多関節アーム機構と、該プローブの位置を演算する処理部と、を有し、該プローブが手動移動されるアーム型三次元測定機であって、
前記多関節アーム機構の各軸に設けられ、該多関節アーム機構の姿勢状態で生じる少なくとも所定の1方向の力及び所定の2軸方向のトルクを検出するセンサを備え、
前記処理部は、該センサの出力に基づき前記多関節アーム機構の各軸における撓み量を演算し、該撓み量に基づき前記プローブの位置を逐次演算することを特徴とするアーム型三次元測定機。 - 前記センサは、所定の3方向の力及び所定の3軸方向のトルクを検出する6軸力覚センサとされていることを特徴とする請求項1に記載のアーム型三次元測定機。
- 前記多関節アーム機構の各軸に連結したリンクは全てカーボンファイバ製とされていることを特徴とする請求項1または2に記載のアーム型三次元測定機。
- 先端にプローブを備える多関節アーム機構と、該プローブの位置を演算する処理部と、を有し、該プローブが手動移動されるアーム型三次元測定機における撓み補正方法であって、
前記多関節アーム機構の各軸において、該多関節アーム機構の姿勢状態で生じる少なくとも所定の1方向の力及び所定の2軸方向のトルクを検出する工程と、
該少なくとも所定の1方向の力及び所定の2軸方向のトルクに基づき前記多関節アーム機構の各軸における撓み量を演算する工程と、
該撓み量に基づき前記プローブの位置を逐次演算する工程と、
を含むことを特徴とするアーム型三次元測定機における撓み補正方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013242409A JP6226716B2 (ja) | 2013-11-22 | 2013-11-22 | アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 |
| US14/546,356 US9366592B2 (en) | 2013-11-22 | 2014-11-18 | Arm type three-dimensional measuring apparatus and deflection correction method in arm type three-dimensional measuring apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013242409A JP6226716B2 (ja) | 2013-11-22 | 2013-11-22 | アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015100871A true JP2015100871A (ja) | 2015-06-04 |
| JP6226716B2 JP6226716B2 (ja) | 2017-11-08 |
Family
ID=53181436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013242409A Active JP6226716B2 (ja) | 2013-11-22 | 2013-11-22 | アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9366592B2 (ja) |
| JP (1) | JP6226716B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101695185B1 (ko) * | 2016-07-06 | 2017-01-11 | 주식회사에이치엔엠이엔지 | 자동차부품용 장착용 공압브레이크를 이용한 무전원 수동식 다축기계장치 |
| KR101695188B1 (ko) * | 2016-07-06 | 2017-01-11 | 김법년 | 부품장착용 무전원 수동식 다축기계장치 |
| WO2019215998A1 (ja) * | 2018-05-10 | 2019-11-14 | パナソニックIpマネジメント株式会社 | ロボットの制御方法 |
| CN111060051A (zh) * | 2020-01-07 | 2020-04-24 | 杭州电子科技大学 | 关节式坐标测量机的测量空间自适应调节方法 |
| US11872700B2 (en) | 2019-04-26 | 2024-01-16 | Fanuc Corporation | Robot with a torque sensor and a force sensor |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9829305B2 (en) | 2014-05-14 | 2017-11-28 | Faro Technologies, Inc. | Metrology device and method of changing operating system |
| US9746308B2 (en) | 2014-05-14 | 2017-08-29 | Faro Technologies, Inc. | Metrology device and method of performing an inspection |
| US9803969B2 (en) | 2014-05-14 | 2017-10-31 | Faro Technologies, Inc. | Metrology device and method of communicating with portable devices |
| US9921046B2 (en) | 2014-05-14 | 2018-03-20 | Faro Technologies, Inc. | Metrology device and method of servicing |
| US9903701B2 (en) * | 2014-05-14 | 2018-02-27 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a rotary switch |
| EP3194884B1 (en) | 2014-09-19 | 2023-11-01 | Hexagon Metrology, Inc | Multi-mode portable coordinate measuring machine |
| CN105241403A (zh) * | 2015-09-29 | 2016-01-13 | 爱佩仪中测(成都)精密仪器有限公司 | 一种可实现现场测量的坐标测量机构 |
| CN105318852A (zh) * | 2015-09-29 | 2016-02-10 | 爱佩仪中测(成都)精密仪器有限公司 | 一种方便收纳的坐标测量系统 |
| CN105241404A (zh) * | 2015-09-29 | 2016-01-13 | 爱佩仪中测(成都)精密仪器有限公司 | 利于坐标测量数值准确性的多臂测量仪 |
| CN105136083A (zh) * | 2015-09-29 | 2015-12-09 | 爱佩仪中测(成都)精密仪器有限公司 | 一种便携式测量装置 |
| CN105277153A (zh) * | 2015-09-29 | 2016-01-27 | 爱佩仪中测(成都)精密仪器有限公司 | 一种易于安装的坐标测量装置 |
| CN107186460A (zh) * | 2017-07-10 | 2017-09-22 | 上海新时达电气股份有限公司 | 工业机器人进行轴孔装配的方法及其系统 |
| CN108297101B (zh) * | 2018-03-20 | 2020-12-22 | 四川大学 | 多关节臂串联机器人末端位姿误差检测和动态补偿方法 |
| JP6898966B2 (ja) * | 2019-06-07 | 2021-07-07 | 株式会社ミツトヨ | 不具合判定ユニット |
| DE102020126816A1 (de) * | 2019-10-14 | 2021-04-15 | Mitutoyo Corporation | Verfahren zum steuern einer formmessvorrichtung |
| US11673257B2 (en) * | 2020-03-17 | 2023-06-13 | Faro Technologies, Inc. | Long-bolt cartridge clamping system |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06313710A (ja) * | 1993-04-28 | 1994-11-08 | Hitachi Plant Eng & Constr Co Ltd | 3次元空間座標計測機のアーム延長装置 |
| JPH0839465A (ja) * | 1994-07-28 | 1996-02-13 | Nachi Fujikoshi Corp | 産業用ロボットの撓み補正方法 |
| JP2002307344A (ja) * | 2001-04-16 | 2002-10-23 | Fanuc Ltd | ロボット制御装置 |
| JP2011110675A (ja) * | 2009-11-30 | 2011-06-09 | Nikon Corp | 形状測定装置 |
| JP2012063164A (ja) * | 2010-09-14 | 2012-03-29 | Canon Inc | センサ装置及びロボット装置 |
| JP2013517507A (ja) * | 2010-01-20 | 2013-05-16 | ファロ テクノロジーズ インコーポレーテッド | 組み込みアーム歪みセンサ |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1633534B1 (en) * | 2003-04-28 | 2018-09-12 | Nikon Metrology NV | Cmm arm with exoskeleton |
| FR2861843B1 (fr) * | 2003-10-29 | 2006-07-07 | Romain Granger | Dispositif de connexion associe a un bras d'appareil de mesure tridimentionnelle a bras articules |
| GB0516276D0 (en) * | 2005-08-08 | 2005-09-14 | Crampton Stephen | Robust cmm arm with exoskeleton |
| CA2669878C (en) * | 2006-11-20 | 2017-01-03 | Hexagon Metrology Ab | Coordinate measurement machine with improved joint |
| JP5153228B2 (ja) * | 2007-06-28 | 2013-02-27 | 株式会社小坂研究所 | 多関節型座標測定装置のパラメータ校正方法 |
| US9488476B2 (en) * | 2014-02-06 | 2016-11-08 | Faro Technologies, Inc. | Apparatus and method to compensate bearing runout in an articulated arm coordinate measurement machine |
| EP2677270B1 (en) * | 2012-06-22 | 2015-01-28 | Hexagon Technology Center GmbH | Articulated Arm CMM |
| JP6104606B2 (ja) * | 2013-01-08 | 2017-03-29 | 株式会社ミツトヨ | 三次元測定装置、入力方法及びプログラム |
| US9163921B2 (en) * | 2013-12-18 | 2015-10-20 | Hexagon Metrology, Inc. | Ultra-portable articulated arm coordinate measurement machine |
-
2013
- 2013-11-22 JP JP2013242409A patent/JP6226716B2/ja active Active
-
2014
- 2014-11-18 US US14/546,356 patent/US9366592B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06313710A (ja) * | 1993-04-28 | 1994-11-08 | Hitachi Plant Eng & Constr Co Ltd | 3次元空間座標計測機のアーム延長装置 |
| JPH0839465A (ja) * | 1994-07-28 | 1996-02-13 | Nachi Fujikoshi Corp | 産業用ロボットの撓み補正方法 |
| JP2002307344A (ja) * | 2001-04-16 | 2002-10-23 | Fanuc Ltd | ロボット制御装置 |
| JP2011110675A (ja) * | 2009-11-30 | 2011-06-09 | Nikon Corp | 形状測定装置 |
| JP2013517507A (ja) * | 2010-01-20 | 2013-05-16 | ファロ テクノロジーズ インコーポレーテッド | 組み込みアーム歪みセンサ |
| JP2012063164A (ja) * | 2010-09-14 | 2012-03-29 | Canon Inc | センサ装置及びロボット装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101695185B1 (ko) * | 2016-07-06 | 2017-01-11 | 주식회사에이치엔엠이엔지 | 자동차부품용 장착용 공압브레이크를 이용한 무전원 수동식 다축기계장치 |
| KR101695188B1 (ko) * | 2016-07-06 | 2017-01-11 | 김법년 | 부품장착용 무전원 수동식 다축기계장치 |
| WO2019215998A1 (ja) * | 2018-05-10 | 2019-11-14 | パナソニックIpマネジメント株式会社 | ロボットの制御方法 |
| CN112041125A (zh) * | 2018-05-10 | 2020-12-04 | 松下知识产权经营株式会社 | 机器人的控制方法 |
| JPWO2019215998A1 (ja) * | 2018-05-10 | 2021-05-20 | パナソニックIpマネジメント株式会社 | ロボットの制御方法 |
| JP7165951B2 (ja) | 2018-05-10 | 2022-11-07 | パナソニックIpマネジメント株式会社 | ロボットの制御方法 |
| CN112041125B (zh) * | 2018-05-10 | 2023-11-24 | 松下知识产权经营株式会社 | 机器人的控制方法 |
| US11872700B2 (en) | 2019-04-26 | 2024-01-16 | Fanuc Corporation | Robot with a torque sensor and a force sensor |
| CN111060051A (zh) * | 2020-01-07 | 2020-04-24 | 杭州电子科技大学 | 关节式坐标测量机的测量空间自适应调节方法 |
| CN111060051B (zh) * | 2020-01-07 | 2021-04-30 | 杭州电子科技大学 | 关节式坐标测量机的测量空间自适应调节方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9366592B2 (en) | 2016-06-14 |
| JP6226716B2 (ja) | 2017-11-08 |
| US20150143707A1 (en) | 2015-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6226716B2 (ja) | アーム型三次元測定機及びアーム型三次元測定機における撓み補正方法 | |
| JP4504818B2 (ja) | 加工物検査方法 | |
| CN109655023B (zh) | 用于确定工具定位机器的状态的系统 | |
| JP6504864B2 (ja) | ロボット制御方法、ロボット装置、プログラム、記録媒体及び物品の製造方法 | |
| JP2025028137A (ja) | ロボット、駆動装置、物品の製造方法、制御方法、制御プログラム、記録媒体 | |
| JP5531996B2 (ja) | 6軸ロボットの軸間オフセット検出方法 | |
| JP6285146B2 (ja) | アーム型三次元測定機及びアーム型三次元測定機を支持する基部の傾斜補正方法 | |
| US11331810B2 (en) | Device, method and program for estimating weight and position of gravity center of load by using robot | |
| JP5786550B2 (ja) | 6軸ロボットの軸間オフセット検出方法 | |
| JP2008275624A (ja) | 座標測定方法および座標測定装置 | |
| US20200116476A1 (en) | 3d floating support system and related geometry-detecting machine of slender articles | |
| JP2012171027A (ja) | ワークピッキングシステム | |
| KR101797122B1 (ko) | 이동형 3차원 좌표 측정기(cmm)의 에러 측정 및 보상 방법 | |
| JP2012040634A (ja) | 力制御ロボットのキャリブレーション装置と方法 | |
| Legnani et al. | Optimal design and application of a low-cost wire-sensor system for the kinematic calibration of industrial manipulators | |
| JP2021003771A (ja) | ロボットシステム | |
| JP7258516B2 (ja) | キャリブレーション方法および把持システム | |
| Olarra et al. | Experimental evaluation of a special purpose miniature machine tool with parallel kinematics architecture: Free leg hexapod | |
| JP5672173B2 (ja) | 6軸ロボットの軸間オフセット検出方法 | |
| JP5316396B2 (ja) | ロボットのばね定数同定方法およびロボットのばね定数同定装置 | |
| JP2014012337A5 (ja) | ||
| Garant et al. | Noncollocated proprioceptive sensing for lightweight flexible robotic manipulators | |
| CN113091670B (zh) | 一种机器人关节刚度的标定装置及标定方法 | |
| Bonnet et al. | Practical whole-body elasto-geometric calibration of a humanoid robot: Application to the TALOS robot | |
| JP5942720B2 (ja) | 状態判別方法、ロボット、制御装置、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171010 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6226716 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |