JP2015107687A - 列車運行制御装置、制御方法及び制御プログラム - Google Patents
列車運行制御装置、制御方法及び制御プログラム Download PDFInfo
- Publication number
- JP2015107687A JP2015107687A JP2013250503A JP2013250503A JP2015107687A JP 2015107687 A JP2015107687 A JP 2015107687A JP 2013250503 A JP2013250503 A JP 2013250503A JP 2013250503 A JP2013250503 A JP 2013250503A JP 2015107687 A JP2015107687 A JP 2015107687A
- Authority
- JP
- Japan
- Prior art keywords
- train
- time
- station
- departure
- curve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/10—Operations, e.g. scheduling or time tables
- B61L27/16—Trackside optimisation of vehicle or train operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0058—On-board optimisation of vehicle or vehicle train operation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【解決手段】列車運行制御装置の運転曲線作成部106は、自列車が次の出発駅となるいずれかの駅に到着した時点において、自列車、自列車の直前を走行する列車である先行列車及び自列車の直後を走行する列車である後続列車のそれぞれの次の出発駅を予め設定された運転ダイヤ通りに出発することが可能な状態にあるか否かに基づいて、自列車が、次の出発駅を出発してから次に停車する駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する。
【選択図】図1
Description
また実際の運行では、列車がダイヤで想定した通りに運行することはほとんどなく、利用者の乗降やドアにものが挟まることや列車自体の故障が発生することによって遅延が発生する。遅延を起こした列車が遅延を回復するためには、なるべく早く走るように運転するしかない。この時、ダイヤで想定している運転に比べて、走行時分が短いためにエネルギー消費量は増加することになる。
そのため、実運転時にはなるべくダイヤ通りの運行に回復させることも考慮しながら、列車全体を制御することが行われている。すると省エネで運転したくとも、遅延が発生している場合には遅延を回復させるためには消費エネルギーが増加する運転をしなくてはならない。
しかしながら、都市近郊路線の朝のラッシュ時のような場合には、先行列車が存在するために遅延も回復できず、かつ、遅延に適した運転を行わないことにより、信号で減速を強いられ、無駄な加減速を行って運行してしまい、消費エネルギーの増大を招く虞がある。
図1は、実施形態の列車運行制御装置の概要構成図である。
図2は、列車と駅との関係説明図である。
以下の説明においては、いずれかの駅(=次に出発駅となる駅:現在駅)に停車している列車を自列車TR1とした場合に、自列車TR1の進行方向前方を進行している直前の列車を先行列車とし、自列車TR1の進行方向後方を進行している直後の列車を後続列車(後行列車)とし、自列車TR1、先行列車及び後続列車の運行状況に応じて、自列車TR1の運行制御を行うものとする。このような構成としているのは、自列車TR1の運行が直接的に影響を与えるのは先行列車と後続列車のみであるとの仮定からである。このため、本実施形態においては、自列車TR1の現在駅の出発時刻および次駅の到着時刻を決めるのに用いる列車の情報は、先行列車と後続列車のみの情報としている。
(1) 自列車TR1の遅延時間=
実際の自列車TR1が現在駅ST1への予定到着時刻
−自列車TR1がダイヤ上の現在駅ST1への予定到着時刻
(2) 自列車TR1の余裕時分=
自列車TR1がダイヤ上で現在駅ST1から前方駅ST0まで走行する時間
−自列車TR1の現在駅ST1から前方駅ST0まで走行する最短の時間
(3) 自列車TR1の現在駅ST1における停車時間=自列車TR1が現在駅ST1で乗客の乗降に要する時間と調整時間の合計
(4) 先行列車TR0の遅延時間=実際の先行列車TR0が前方駅ST0への予定到着時刻−先行列車TR0がダイヤ上で前方駅ST0への予定到着時刻
(5) 先行列車TR0の前方駅ST0の閉塞開通時刻=先行列車TR0が前方駅ST0位置における閉塞を通過する時刻
(6) 先行列車TR0の前方駅ST0における停車時間=先行列車TR0が前方駅ST0で乗客の乗降に要する時間と調整時間の合計
(7) 後続列車TR2の遅延時間=実際の後続列車TR2が後方駅ST2への予定到着時刻−後続列車TR2がダイヤ上で後方駅ST2への予定到着時刻
(8) 後続列車TR2の後方駅ST2における停車時間=後続列車TR2が後方駅ST2で乗客の乗降に要する時間と調整時間の合計
走行時分=現在駅ST1の予定出発時刻−前方駅ST0の予定到着時刻
自列車TR1の現在駅ST1の予定出発時刻と自列車TR1の前方駅ST0の到着予定時刻は、先行列車TR0と後続列車TR2の運行状況を考慮して決められる。自列車TR1及び先行列車TR0・後続列車TR2の現在の状況は遅延時間によって評価する。
定刻許容時間αは、定刻と見なして取り扱う時間範囲を表すパラメータである。
早着:遅延時間td<−α
定刻:−α≦遅延時間td≦α
遅延:遅延時間td>α
自列車TR1、先行列車TR0及び後続列車TR2のそれぞれについて2通りの状態が存在し、自列車TR1、先行列車TR0及び後続列車TR2の全てについて考慮する場合には、図3に示すように、全部で23=8通りの状態(状態ID=1〜8)が存在する。
・自列車TR1の自列車TR1が現在駅ST1を出発する予定出発時刻
・自列車TR1が前方駅ST0に到着する予定到着時刻
・自列車TR1が現在駅ST1から前方駅ST0まで走行するのに要する時間(走行時分)
を設定する。
[1]状態ID=1:後続列車TR2、自列車TR1、先行列車TR0がすべて早着または定刻の場合。
これにより、自列車TR1の走行時分は、以下の通りとなる。
=ダイヤ上の次駅の予定到着時刻
−ダイヤ上の現在駅ST1の予定出発時刻
=ダイヤ上の走行時分
したがって、状態ID=1の場合には、自列車TR1は、ダイヤ上で設定された運転曲線に従って運転することとなる。
後続列車TR2のみが遅延している場合、自列車TR1は現在駅ST1をダイヤ上設定されている予定出発時刻で出発できるが、ダイヤ上設定されている予定出発時刻で出発すると後続列車TR2との時隔が大きくなってしまう。時隔が大きくなると、後続列車TR2が現在駅ST1に到着するまでに現在駅ST1にはダイヤ通りの運行時と比較して、多くの乗客が発生する可能性があり、後続列車TR2が現在駅ST1でさらに遅延を増大させる可能性がある。
そこで、本実施形態では、自列車TR1自身の遅延を増加させない範囲で後続列車TR2との時隔を調整するように現在駅ST1の予定出発時刻を定める。
この場合には、自列車TR1は、ダイヤ上の現在駅ST1の予定出発時刻+(自列車TR1の余裕時分−後続列車TR2の遅延時間)で出発し、ダイヤ上の次駅の予定到着時刻に到着するように計画する。
その際、自列車TR1の走行時分は、以下のように定める。
=ダイヤ上の次駅の予定到着時刻
−{ダイヤ上の現在駅ST1の予定出発時刻
+(自列車TR1の余裕時分
−後続列車TR2の遅延時間)}
=ダイヤ上の走行時分
−(自列車TR1の余裕時分
−後続列車TR2の遅延時間)≧最短走行時分
したがって、予め残しておいた時間的な余裕を走行時分に転化することで消費エネルギー的には、増加を招くが、後続列車TR2との運転時隔を大きくし、後続列車TR2へ乗車する人の偏りを自列車TR1により吸収でき、後続列車TR2への乗車が集中することによる遅延増加の要因を小さくできる。
自列車TR1は、(ダイヤ上の現在駅ST1の予定出発時刻+自列車TR1の余裕時分)で出発し、ダイヤ上の前方駅ST0の予定到着時刻に到着するように計画する。したがって、自列車TR1の走行時分は現在駅ST1と前方駅ST0との間の最短走行時分と等しくなる。
したがって、この場合にも、後続列車TR2へ乗車する人の偏りを自列車TR1により吸収でき、後続列車TR2への乗車が集中することによる遅延増加の要因を小さくできる。
自列車TR1のみが遅延している場合、自列車TR1は遅延を回復させるように運転を行う。
この場合には、以下のように計画する。
・自列車TR1の現在駅ST1の出発予定時刻
=ダイヤ上の現在駅ST1の予定出発時刻+遅延時間
・自列車TR1の前方駅ST0の予定到着時刻
=ダイヤ上の前方駅ST0の予定到着時刻
この際に、自列車TR1の走行時分は、以下のように定める。
−現在駅ST1の予定出発時刻
=ダイヤ上の前方駅ST0の予定到着時刻
−{ダイヤ上の現在駅ST1の予定出発時刻
+(自列車TR1の余裕時分
−自列車TR1の遅延時間)}
=ダイヤ上の走行時分
−(自列車TR1の余裕時分
−自列車TR1の遅延時間)
≧最短走行時分
したがって、予め残しておいた時間的な余裕を走行時分に転化することで消費エネルギー的には、増加を招くが、自列車TR1の遅延を後続列車TR2に影響を与えないで、前方駅ST0までに遅延を回復させることができる。
この場合には、自列車TR1は、出発時刻及び自列車TR1の前方駅ST0への予定到着時刻を以下のように定める。
・出発時刻=ダイヤ上の現在駅ST1の予定出発時刻+遅延時間
・自列車TR1の前方駅ST0の予定到着時刻
=現在駅ST1の予定出発時刻
+遅延時間+前方駅ST0までの最短走行時分
先行列車TR0のみが遅延している場合、自列車TR1は先行列車TR0の遅延の程度によってはダイヤ上設定されている前方駅ST0への予定到着時刻で到着することができなくなる。そこで先行列車TR0が遅延を起こしている場合には先行列車TR0の前方駅ST0の閉塞開通時刻を考慮して、現在駅ST1の予定出発時刻を定める。
先行列車TR0の前方駅ST0における閉塞開通時刻が、自列車TR1のダイヤ上の前方駅ST0の予定到着時刻以前(先行列車TR0の前方駅ST0閉塞開通時刻≦自列車TR1のダイヤ上の前方駅ST0の予定到着時刻)の場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の前方駅ST0の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
・自列車TR1の前方駅ST0の予定到着時刻
=ダイヤ上の前方駅ST0の予定到着時刻
・自列車TR1の走行時分=ダイヤ上の現在駅ST1の予定到着時刻
−ダイヤ上の現在駅ST1の予定出発時刻
=ダイヤ上の走行時分
先行列車TR0の前方駅ST0の閉塞開通時刻が自列車TR1のダイヤ上の前方駅ST0の予定到着時刻経過後(先行列車TR0の前方駅ST0の閉塞開通時刻>自列車TR1のダイヤ上の前方駅ST0の予定到着時刻)の場合。
自列車TR1はダイヤ上で設定されている走行時分で運行することは不可能である。そのため、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
・自列車TR1の走行時分=次駅の予定到着時刻−現在駅ST1の予定出発時刻
=先行列車TR0の次駅閉塞開通時刻
−ダイヤ上の現在駅ST1の予定出発時刻
≧ダイヤ上の走行時分
ダイヤ上の走行時分よりも長いことと、先行列車TR0の存在による閉塞区間における速度制限を考慮し、上述した自列車TR1の走行時分で省エネ運転曲線を作成する。
先行列車TR0が早着または定刻で、自列車TR1と後続列車TR2が遅延している場合、自列車TR1は自身の遅延を回復させるためにはなるべく前方駅ST0に着くまでの間に遅延を回復させたいが、遅延回復のために早く出発すると、後続列車TR2に対する運転時隔が大きくなり、後続列車TR2が現在駅ST1で遅延を増大させる原因を作ることになり得る。
そこで、本実施形態においては、自列車TR1は後続列車TR2との運転時隔を考慮しつつ、遅延を回復させるように現在駅ST1の予定出発時刻を定めている。
[5.1.1]後続列車TR2の遅延時間が自列車TR1の余裕時分から自列車TR1の遅延時間を差し引いた時間以下である場合。
後続列車TR2の遅延時間が自列車TR1の余裕時分から自列車TR1の遅延時間を差し引いた時間以下[続列車の遅延時間≦(自列車TR1の余裕時分−自列車TR1の遅延時間)]である場合には、自列車TR1の現在駅ST1の予定出発時刻及び自列車TR1の走行時分を以下の通りとする。
・自列車TR1の現在駅ST1の予定出発時刻
=ダイヤ上の現在駅ST1の予定出発時刻
+後続列車TR2の遅延時間
・自列車TR1の走行時分=ダイヤ上の走行時分−後続列車TR2の遅延時間
後続列車TR2の遅延時間が自列車TR1の余裕時分から自列車TR1の遅延時間を差し引いた時間を超える[後続列車TR2の遅延時間>(自列車TR1の余裕時分−自列車TR1の遅延時間)]場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の前方駅ST0の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+(自列車TR1の余裕時分−自列車TR1の遅延時間)
・自列車TR1の前方駅ST0の予定到着時刻
=ダイヤ上の前方駅ST0の予定到着時刻
・自列車TR1の走行時分=ダイヤ上の次駅の予定到着時刻
−ダイヤ上の現在駅ST1の予定出発時刻
=ダイヤ上の走行時分
−(自列車TR1の余裕時分−自列車TR1の遅延時間)
自列車TR1の遅延時間が自列車TR1の余裕時分を超える(自列車TR1の遅延時間>自列車TR1の余裕時分)場合には、自列車TR1の現在駅ST1の予定出発時刻及び自列車TR1の前方駅ST0の予定到着時刻を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+自列車TR1の遅延時間
・自列車TR1の前方駅ST0の予定到着時刻
=自列車TR1の現在駅ST1の予定出発時刻+最短走行時分
自列車TR1が早着または定刻で、先行列車TR0・後続列車TR2が遅延をしている場合、自列車TR1は先行列車TR0の遅延の程度によってはダイヤ上設定された前方駅ST0の予定到着時刻で到着することが不可能である。また、後続列車TR2に対してもダイヤ上設定された現在駅ST1の予定出発時刻で出発することで、後続列車TR2が現在駅ST1に到着した時に遅延を増大させる可能性もある。そこで自列車TR1は先行列車TR0の前方駅ST0の閉塞開通時刻を考慮して、現在駅ST1の予定出発時刻を定める。
先行列車TR0の前方駅ST0の閉塞開通時刻が自列車TR1のダイヤ上の前方駅ST0の予定到着時刻以前(先行列車TR0の前方駅ST0の閉塞開通時刻≦自列車TR1のダイヤ上の前方駅ST0の予定到着時刻)である場合には、後続列車TR2の遅延時間及び自列車TR1の余裕時分に基づいて、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
後続列車TR2の遅延時間が自列車TR1の余裕時分以下(後続列車TR2の遅延時間≦自列車TR1の余裕時分)である場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+後続列車TR2の遅延時間
・自列車TR1の次駅の予定到着時刻=ダイヤ上の現在駅ST1の予定到着時刻
・自列車TR1の走行時分=ダイヤ上の走行時分−後続列車TR2の遅延時間
後続列車TR2の遅延時間が自列車TR1の余裕時分を超えている(後続列車TR2の遅延時間>自列車TR1の余裕時分)場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻+余裕時分
・自列車TR1の次駅の予定到着時刻=ダイヤ上の現在駅ST1の予定到着時刻
・自列車TR1の走行時分=ダイヤ上の最短走行時分
先行列車TR0の前方駅ST0の閉塞開通時刻が自列車TR1のダイヤ上の前方駅ST0の予定到着時刻を超えている(先行列車TR0の前方駅ST0の閉塞開通時刻>自列車TR1のダイヤ上の前方駅ST0の予定到着時刻)場合には、後続列車TR2の遅延時間、先行列車TR0の次駅閉塞開通時刻及び自列車TR1のダイヤ上の次駅の予定到着時刻に基づいて、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
後続列車TR2の遅延時間が、先行列車TR0の次駅閉塞開通時刻から自列車TR1のダイヤ上の次駅の予定到着時刻を差し引いた時間以下である[後続列車TR2の遅延時間≦(先行列車TR0の次駅閉塞開通時刻−自列車TR1のダイヤ上の次駅の予定到着時刻)]場合には、後続列車TR2の遅延時間、先行列車TR0の次駅閉塞開通時刻及び自列車TR1のダイヤ上の次駅の予定到着時刻に基づいて、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+後続列車TR2の遅延時間
・自列車TR1の次駅の予定到着時刻=先行列車TR0の次駅閉塞開通時刻
・自列車TR1の走行時分=先行列車TR0の次駅閉塞時刻
−自列車TR1の現在駅ST1の予定出発時刻
後続列車TR2の遅延時間が、先行列車TR0の次駅閉塞開通時刻から自列車TR1のダイヤ上の次駅の予定到着時刻を差し引いた時間を超えている[後続列車TR2の遅延時間>(先行列車TR0の次駅閉塞開通時刻−自列車TR1のダイヤ上の次駅の予定到着時刻)]である場合には、後続列車TR2の遅延時間、先行列車TR0の次駅閉塞開通時刻及び自列車TR1のダイヤ上の次駅の予定到着時刻に基づいて、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=先行列車TR0の次駅閉塞開通時刻
−自列車TR1の現在駅ST1と前方駅ST0間の最短走行時分
・自列車TR1の次駅の予定到着時刻=先行列車TR0の次駅閉塞開通時刻
・自列車TR1の走行時分=ダイヤ上の最短走行時分
後続列車TR2が早着または定刻、自列車TR1及び先行列車TR0が遅延している場合、自列車TR1は後続列車TR2の進行をふさがないようになるべく現在駅ST1を早く出発する必要がある。しかしながら、先行列車TR0の遅延の程度によっては、自列車TR1の前方駅ST0の予定到着時刻よりも遅い時刻にしか到着できないことがある。
そこで、後続列車TR2が早着または定刻、自列車TR1及び先行列車TR0が遅延の場合には、自列車TR1は先行列車TR0の前方駅ST0の閉塞開通時刻を考慮して、現在駅ST1の予定出発時刻を定める。
自列車TR1の遅延時間が自列車TR1の余裕時分以下(自列車TR1の遅延時間≦自列車TR1の余裕時分)である場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の前方駅ST0の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+自列車TR1の遅延時間
・自列車TR1の前方駅ST0の予定到着時刻
=ダイヤ上の前方駅ST0の予定到着時刻
・自列車TR1の走行時分
=ダイヤ上の走行時分
−(自列車TR1の余裕時分−自列車TR1の遅延時間)
≧最短走行時分
自列車TR1の遅延時間が自列車TR1の余裕時分を超えている(自列車TR1の遅延時間>自列車TR1の余裕時分)場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の前方駅ST0の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+自列車TR1の遅延時間
・自列車TR1の次駅の予定到着時刻
=ダイヤ上の現在駅ST1の予定到着時刻
+(自列車TR1の遅延時間−自列車TR1の余裕時分)
・自列車TR1の走行時分=最短走行時分
先行列車TR0の前方駅ST0の閉塞開通時刻が、自列車TR1のダイヤ上の次駅の予定到着時刻に自列車TR1の遅延時間を加算し、自列車TR1の余裕時分を差し引いた時刻を越えている[先行列車TR0の前方駅ST0の閉塞開通時刻>(自列車TR1のダイヤ上の次駅の予定到着時刻+自列車TR1の遅延時間−自列車TR1の余裕時分)]場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の前方駅ST0の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻
+自列車TR1の遅延時間
・自列車TR1の次駅の予定到着時刻
=先行列車TR0の前方駅ST0の駅閉塞開通時刻
・自列車TR1の走行時分=自列車TR1の前方駅ST0の予定到着時刻
−自列車TR1の現在駅ST1の予定出発時刻
自列車TR1、先行列車TR0及び後続列車TR2のすべてが遅延している場合、自列車TR1は自身の遅延時間を含め、後続列車TR2と先行列車TR0の遅延まですべて考慮して現在駅ST1の予定出発時刻と前方駅ST0の予定到着時刻を定めなければならない。
・自列車TR1の走行時分=ダイヤ上の走行時分−後続列車TR2の遅延時間
後続列車TR2の遅延時間が、自列車TR1の余裕時分から自列車TR1の遅延時間を差し引いた時間を超えている(後続列車TR2の遅延時間>自列車TR1の余裕時分−自列車TR1の遅延時間)場合には、自列車TR1の現在駅ST1の予定出発時刻、自列車TR1の次駅の予定到着時刻及び自列車TR1の走行時分を以下の通りとする。
=ダイヤ上の現在駅ST1の予定出発時刻+余裕時分
・自列車TR1の次駅の予定到着時刻=ダイヤ上の現在駅ST1の予定到着時刻
・自列車TR1の走行時分=ダイヤ上の最短走行時分
=ダイヤ上の現在駅ST1の予定出発時刻
+後続列車TR2の遅延時間
・自列車TR1の次駅の予定到着時刻=先行列車TR0の次駅閉塞開通時刻
・自列車TR1の走行時分=先行列車TR0の次駅閉塞時刻
−自列車TR1の現在駅ST1の予定出発時刻
=先行列車TR0の次駅閉塞開通時刻
−自列車TR1の現在駅ST1と前方駅ST0間の最短走行時分
・自列車TR1の次駅の予定到着時刻=先行列車TR0の次駅閉塞開通時刻
・自列車TR1の走行時分=ダイヤ上の最短走行時分
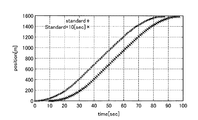
先行列車TR0による速度制限は、先行列車TR0の運転曲線に基づいて算出される。その作成方法に関して図4を参照して、具体的に説明する。なお、ここでの運転曲線は列車先頭位置を基準にして作成されているものとする。
ここで、先行列車TR0の運転曲線については、すでに決まっているものとする。
先行列車TR0が出発した駅(4700[m]地点)から到着駅(6750[m]地点)の間に存在する閉塞区間が同時にわかる。現行の鉄道では保安のために1つの閉塞に複数の列車が存在できないことになっている。そこで先行列車TR0が駅を出発した時刻(ここでは200秒を出発時刻とした)からの経過時間で、閉塞区間から列車が通過したかを算出する。それは各閉塞の切れ目から列車長だけ進んだ位置の通過時間を見ればよい。
第1閉塞区間CA1を通過:245秒
第2閉塞区間CA2を通過:265秒
第3閉塞区間CA3を通過:284秒
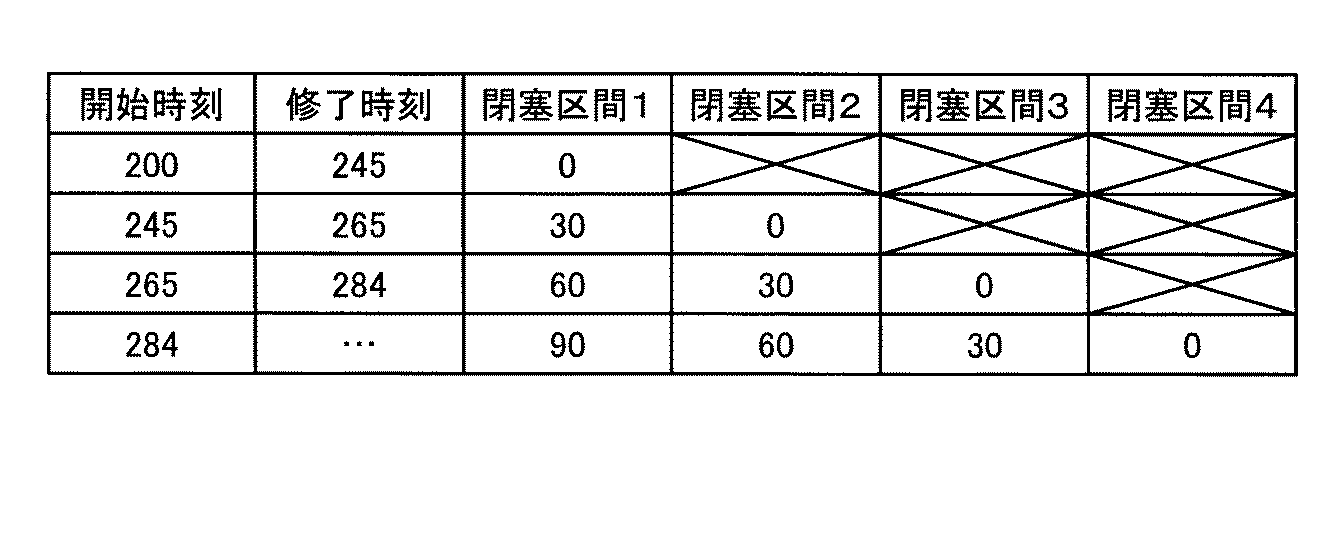
続いて、各閉塞区間の経過時間に対して、自列車TR1の速度制限を設定する。
ここで簡単化のため、速度制限は存在する列車に近い方から0、30、60、90[km/h]で定められるものとする。なお、図5は、一例であり、速度制限の決め方は各鉄道事業者によっても異なるため、この限りではない。
図5の例の場合、時刻200秒〜時刻245秒までは、先行列車TR0が第1閉塞区間CA1内に存在しているので、第1閉塞区間CA1における自列車TR1の速度制限は、0km、すなわち、停車となり、進入が禁止される。
まず、省エネ運転曲線の作成の原理的な考え方について説明する。
列車の省エネ運転曲線は、制約として走行抵抗および勾配抵抗などを含んだ運動方程式と、出発してからの経過時間t、速度v及び出発駅からの距離xで表した、出発駅での状態(初期状態)を、(t,v,x)=(0,0,0)とし、到着駅での状態(終端状態)を(t,v,x)=(T,0,X)とした2点境界値を有する。
ここで、Tは、出発駅から到着駅に至るのに要した経過時間、Xは、出発駅と到着駅との間の距離である。
以下、組み合わせ爆発について簡単に説明する。
例えば、ノッチの選択肢が10個あり、走行時間が100秒の運転曲線を最小制御時間単位1秒として作成する場合には、10100個の解候補の中から制約を満たす解を見つけ出さなければならない。この中からしらみつぶしに制約を満たす解を見つけることは現実的な時間の範囲では不可能である。
動的計画法を用いた運転曲線の作成は列車の(時間、速度、位置)の状態を格子点上に定義し、その格子点を最も累積消費エネルギーが小さくなる経路を探索するものである。その際、ある状態(t,v,x)に到達する複数の経路がある場合に、最も累積した消費エネルギーが小さい経路のみを記憶し、探索を続ける。動的計画法を用いる場合、予め状態空間を格子状に分割するが、一般に格子点から格子点へ移動するのはまれである。そのため、格子点に乗らない場合には何らかの補正を施し、格子点に移動したものとしている。この方法では格子点への補正が多くなると、最適解と比較して誤差が大きくなる問題点がある。
運転曲線作成部106は、車両情報、駅間情報、走行時間情報等の各種データが入力されると、車両・路線DB105を参照し、入力された車両情報及び駅間情報に基づいて、運転曲線作成に必要なデータを取得する(ステップS101)。
続いて、運転曲線作成部106は、入力された駅間での最短時間の運転曲線を作成する(ステップS102)。
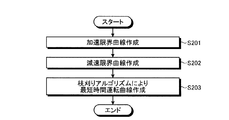
最短時間運転極性作成処理は、大別すると、加速限界曲線作成処理(ステップS201)、減速限界曲線作成処理(ステップS202)及び枝刈りアルゴリズムによる最短時間運転曲線作成処理(ステップS203)を備えて構成されている。
最短時間運転曲線を作成するには、初期条件と終端条件を持つ最短時間制御の解を求めることになる。一般に最短時間制御はbang−bang制御と呼ばれる最大加速度または最大減速度によって制御されるものである。しかしながら、列車の運行時には主に位置による速度制限が加わるために必ずしも最大加速度と最大減速度のみで制御できるわけではない。そこで最大加速度と最大減速度で列車を動かすことができる範囲を求める。
図9は、加速限界曲線の作成処理の処理フローチャートである。
図10は、減速限界曲線の作成処理の処理フローチャートである。
列車の運行時において、最大加速度と最大減速度を用いることができるのは、図8に示すように、ケースCase1〜Case4の4通りの場合である。
Case1:出発駅を出発する時、最大加速度を用いる
Case2:到着駅に到着する時、最大減速度を用いる
Case3:制限速度が進行方向で増加する時、最大加速度を用いる
Case4:制限速度が進行方向で減少する時、最大減速度を用いる
一つの駅間において、Case1の状態と、Case2の状態とは必ず一つずつしか存在しない。
struct velocity_limitation{
double position;//速度制限の開始位置
double velocity;//上記開始位置以降の制限速度
};
struct velocity_limitation ST[3]
={{0,vmax},{x1,v2},{x2,vmax}};
となる。
ここでST[0].position< ST[1].position< ST[2].position< ST[3].positionのように、構造体のインデックスが小さいほど、開始位置は小さいものとする。
加速限界曲線のターゲット位置=0;//Case1
加速限界曲線のターゲット速度=0;//Case1
減速限界曲線のターゲット位置=X;//Case2(出発駅から到着駅までの距離)
減速限界曲線のターゲット速度=0;//Case2
とする。それ以外は以下の条件に一致する位置を加速限界曲線と減速限界曲線のターゲット位置に設定する。
if(ST[i−1].velocity < ST[i].velocity){
加速限界曲線のターゲット位置
=ST[i].position; //Case3
加速限界曲線のターゲット速度
=ST[i−1].velocity; //Case3
}else{
減速限界曲線のターゲット位置
= ST[i].position; //Case4
減速限界曲線のターゲット速度
=ST[i].velocity; //Case3
}
}
加速限界曲線の場合は、
struct velocity_limitation ST[2]
={{0,0},{x2,v2}};
になり、減速限界曲線の場合は
struct velocity_limitation ST[2]
={{x1,v2},{{X,0}};
になる。
ところで、加速限界曲線は、最大加速を用いる速度と位置の初期条件を与えることで容易に求めることができる。
次に加速限界曲線のターゲット位置、すなわち、加速経過時刻i=0、加速限界曲線における初期速度v(0)=ST[s].velocity及び初期位置x(0)=ST[s].positionを設定する(ステップS402)。
続いて運転曲線作成部106は、時刻iにおける状態(v(i),x(i))を最大加速ノッチ(最大の加速度を得ることが可能なノッチ位置に相当)で運動方程式を解いて、算出する(ステップS404)。
v(i)>vmax
あるいは、時刻iにおける位置x(i)がターゲット位置ST[s].positionを超えたか否かを判別する(ステップS405)。
s=sizeof(ST[s])/sizeof(ST[0])
となったか否かを判別する(ステップS406)。
ステップS406の判別において、加速限界曲線のターゲット位置に至った場合には(ステップS406;Yes)、運転曲線作成部106は、加速限界曲線の作成処理を終了する。
本実施形態においては、減速限界曲線の場合、終端条件を満たす初期条件を反復法で探索する。一般には終端条件と正確に一致することがほぼ不可能なため、終端条件に許容範囲(ε及びδ)を与えて、その範囲を満たす初期条件を求めている。
次に運転曲線作成部106は、減速限界曲線のターゲット位置、すなわち、減速経過時刻i=0、減速限界曲線における初期速度v(0)=vmax及び初期位置x(0)=(a+b)/2.0を設定する(ステップS502)。
そして、運転曲線作成部106は、時刻iにおける列車の状態を最大減速ノッチで運動方程式を解き、算出する(ステップS504)。
続いて運転曲線作成部106は、時刻iにおける速度v(i)が許容値εに対応する次式を満たしているか否かを判別する(ステップS505)。
0≦v(i)<ε
ε≦v(i)
である場合には(ステップS505;No)、運転曲線作成部106は、再び処理をステップS503に移行して以下、同様の処理を行う。
0≦v(i)<ε
である場合には(ステップS505;Yes)、運転曲線作成部106は、時刻iにおける位置x(i)が許容値δに対応する次式を満たしているか否かを判別する(ステップS506)。
|x(i)−Distance|<δ
|x(i)−Distance|≧δ
である場合には(ステップS506;No)、運転曲線作成部106は、
x(i)<Distance
であるか否かを判別する(ステップS507)。
x(i)<Distance
である場合には(ステップS507;Yes)、運転曲線作成部106は、
a=(a+b)/2.0
として処理を再びステップS502に移行して以下、同様の処理を行う(ステップS508)。
x(i)≧Distance
である場合には(ステップS507;No)、運転曲線作成部106は、
b=(a+b)/2.0
として(ステップS509)、処理を再びステップS502に移行して以下、同様の処理を行う。
|x(i)−Distance|<δ
である場合には(ステップS506;Yes)、運転曲線作成部106は、減速限界曲線のターゲット位置に至ったか否かを判別し、すなわち、
s=sizeof(ST[s])/sizeof(ST[0])
となったか否かを判別する(ステップS510)。
ステップS510の判別において、減速限界曲線のターゲット位置に至った場合には(ステップS510;Yes)、運転曲線作成部106は、減速限界曲線の作成処理を終了する。
これに対し、本実施形態の手法によれば、微分方程式をより正確に解くための方法を用いており、逆引きの方法に比べて精度がよい減速限界曲線が得られる。
図11は、最短時間運転曲線の作成処理の処理フローチャートである。
ここで、図11に示す変数previous_state、変数current_state及び変数middle_stateについて説明する。
特にC++やJAVAでは、要素数によって配列の大きさを変えられる可変長配列を使うことができる。このため、本実施形態では、各時刻での解候補を可変長配列を用いて表現するものとする。
struct phase{
double position;//位置
double velocity;//速度
double energy;//瞬時のエネルギー消費量
double total_energy;//累積のエネルギー消費量
int notch[500];//各時刻でのノッチ番号
int change_count;//ノッチ切替回数
int notch_continuous_time;//現在のノッチの継続時間};
のような構造体で表現する。
vector<struct phase> previous_state;
vector<struct phase>current_state;
vector<struct phase>middle_state;
として解候補を表現すればよい。
次に経過時間t+1の解候補それぞれに対して、すべてのノッチでの運動方程式(微分方程式)を解き経過時間tの解候補を(経過時間tの解候補個数)×(ノッチ選択数)個作成し、その解候補を変数current_stateとして保存し、変数previous_stateをメモリから解放(クリア)する(ステップS602)。
まず、経過時間tにおいて解候補がN個あったものとする。
N個中の第n番目の解候補の状態を(t,vn(t),xn(t))と記述すれば、n番目の状態(t,vn(t),xn(t))を数値計算上の初期値として、k番目のノッチNOTCH(k)の与える加速度または減速度を用いて、4次のルンゲ・クッタ法などの数値計算によって経過時間t+1の状態を計算する。ここでは4次のルンゲ・クッタ法を数値計算例に挙げたが、運動方程式の数値解法はこの限りではない。
これにより、経過時間t+1の解候補はNK個だけ生成される。
そこで、以下の説明においては、K=20として考える。
ステップS605の判別において条件を満たさない場合は(ステップS605;No)、経過時間tに1を加算して(インクリメントして)(ステップS606)、処理を再びステップS602に移行し、以下同様の処理を繰り返す。
図12は、省エネ運転曲線の作成処理の処理フローチャートである。
まず、運転曲線作成部106は、走行時間Tの省エネ運転曲線を作成する(ステップS103)。
このため、運転曲線作成部106は、上述した最短時間運転曲線の結果を上限値に、最短時間運転曲線の結果を時間方向に走行時間Tだけ移動したものを下限値としてセットする(ステップS700)。
まず、運転曲線作成部106は、出発駅の初期条件として経過時間t=0、速度v=0、位置x=0を変数previous_stateに設定する(ステップS701)。
ステップS705の判別において、未だ経過時間t<走行時間Tである場合には(ステップS705;No)、運転曲線作成部106は、経過時間tに1を加算して(インクリメントして:ステップS706)、処理を再びステップS702に移行し、以下同様の処理を繰り返す。
簡単化のため、ここではある駅間を走行時間Tmin+10で走行した場合の運転曲線を算出することを例に挙げて、説明する。ここで最短走行時間Tminは、その駅間を最短で走行した場合の走行時間(最短走行時間)である。
最短走行時間Tminに対して10秒長い走行時間Tmin+10で駅間を走行することを考える。
上のグラフは、最短走行時間Tminで走行した場合の位置xと経過時間tとの関係を表しており、下のグラフは、出発駅で10秒待機してから最短走行時間Tminで走行した場合の位置xと経過時間tとの関係を表している。
つまり、車両特性が決まれば、最短走行時間Tminが一意に求まる。
したがって、ある時刻において、下のグラフよりも位置xが出発駅に近い場合には、走行時間Tmin+10では、到着駅(次駅)に到着できないことを表している。
ある駅間を走行時間Tmin+10で走行する時、その駅間で最短走行時間Tminで走行する場合の経過時間tにおける位置をUpper[t]、最短走行時間での(t,Upper[t])を時間軸方向に10秒だけ平行移動したグラフを(t,Lower[t])とする。ただし、t<10ではLower[t]=0とする。
Lower[t]≦x(t)≦Upper[t]
が成り立つ。
ここで、t:0,1,2,…,Tmin+10である。
一般に鉄道業界においては、このグラフを運転曲線と呼ぶ。ここで(v−x)グラフにおいて、走行時間Tに対応する位置xにおける速度VをVT[x]と書くことにする。すると、先行研究の結果からは次の特性があることがわかっている。
0≦VT[x]≦VTmin[x]
ここで、0≦x≦Xである。
ただし、最短時間運転曲線の結果も離散経過時間tにおける列車の速度、位置しかわかっておらず、VTmin[x]と同様に算出することは難しい。
例えば、生成される運転曲線に沿って車両の運転を行うためには、各時刻で細かくノッチを操作しなければならない可能性があり、実用的ではない可能性がある。
さらにステップS704では、ステップS703でそれぞれの条件を満たす解候補が保存してある変数middle_stateの中で経過時間t+1における状態(t,v(t),x(t))を速度と位置に関して量子化し、量子化された速度と位置、ノッチ切替回数、ノッチ継続時間が同じものをグルーピングし、グルーピングした中でその中で最も累積エネルギー消費量が小さいものだけを解候補として残していた。
また、本実施形態においては、瞬時のエネルギー消費量に関しても上限値を超えないようにノッチを選択するといった拡張も容易に行える。
図15は、量子化処理の説明図である。
位置と速度は連続値のため、量子化をするためには、例えば位置に関しては1[m]、速度に対しても0.1[m/sec]といった一定幅によって値を量子化したり、位置に関しては時刻tにおける上限値Upper[t]と下限値Lower[t]が定まるため、Upper[t]とLower[t]をN分割することで量子化したりする方法がある。ここでは位置と速度は一定幅に量子化することを前提にして、以降説明を行う。
量子化処理は(v(t),x(t),n(t))空間上を、図15(a)に示すように、格子状(矩形状)に分割し、同じ領域内は同じ状態(条件)とみなす。ここでn(t)は経過時間tにおけるノッチ切替回数とする。
図15(b)中、黒点は各領域内で解候補として残ったものを表す。
また、終了時点で解候補が複数ある場合には、運転曲線作成部106は、累積エネルギー消費量+penalty(v,x)が最も小さい解を最適解とする。
これにより、運転情報抽出部107は、作成した省エネ運転曲線を用いて各閉塞進入地点での速度制限値を抽出し、抽出した速度制限値を信号機に通信する。
図16の例においては、2000m地点での速度制限値=110km/h、3000m地点での速度制限値=100km/h、4000m地点での速度制限値=90km/hとされ、前方駅ST0に向かうに従って、徐々に速度制限値が低くなるようにされており、安全かつ省エネで、よりダイヤに沿った運行が行える。
また、本実施形態の列車運行制御装置の制御プログラムを、ROM等に予め組み込んで提供するように構成してもよい。
101 ダイヤデータベース(DB)
102 出発時刻・到着時刻算出部
104 速度制限算出部
105 車両・路線データベース(DB)
106 運転曲線作成部
107 運転情報抽出部
CA1 第1閉塞区間
CA2 第2閉塞区間
CA3 第3閉塞区間
CA4 第4閉塞区間
ST0 前方駅(先行列車の次の出発駅)
ST1 現在駅(自列車の次の出発駅)
ST2 後方駅(後続列車の次の出発駅)
TR0 先行列車
TR1 自列車
TR2 後続列車
Claims (8)
- 自列車が次の出発駅となるいずれかの駅に到着した時点において、前記自列車、前記自列車の直前を走行する列車である先行列車及び前記自列車の直後を走行する列車である後続列車のそれぞれの次の出発駅を予め設定された運転ダイヤ通りに出発することが可能な状態にあるか否かに基づいて、前記自列車が、前記次の出発駅を出発してから次に停車する前方駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する運転曲線作成部を備えた、
列車運行制御装置。 - 前記運転ダイヤ通りに出発可能な状態とは、列車が前記次の出発駅に早着あるいは定刻に到着可能な状態である、
請求項1記載の列車運行制御装置。 - 前記自列車の次の出発駅の予定出発時刻と次の到着駅である前方駅の予定到着時刻を算出する出発時刻・到着時刻算出部と、
前記先行列車による各閉塞進入位置における速度制限を算出する速度制限算出部と、をさらに備え、
前記運転曲線作成部は、前記速度制限算出部の算出結果を制約に用い、前記自列車が、前記次の出発駅を出発してから前記前方駅に到着するためのより累積消費エネルギーが小さい運転曲線を作成する、
請求項1又は請求項2記載の列車運行制御装置。 - 前記出発時刻・到着時刻算出部は、前記先行列車の遅延時間、前記後続列車の遅延時間、前記先行列車の次の出発駅における予定出発時刻及び、前記後続列車の次の出発駅における予定出発時刻、自列車の余裕時分及び自列車の遅延時間に基づいて、前記自列車の次の出発駅の予定出発時刻と次の到着駅である前方駅の予定到着時刻を算出する、
請求項3記載の列車運行制御装置。 - 前記運転曲線の作成対象の路線を走行する車両の乗車率に対する各ノッチの特性およびモータ・インバータの特性と、前記路線の位置に対する速度制限と、前記路線の位置に対する勾配と、前記路線の位置に対する曲率半径と、を格納した車両・路線データデータベースを備え、
前記運転曲線作成部は、前記車両・路線データデータベースを参照して前記運転曲線を作成する、
請求項1乃至請求項4のいずれかに記載の列車運行制御装置。 - 前記運転ダイヤの情報を格納しているダイヤデータベースと、
前記運転ダイヤに対する過去の運転時隔、駅における停車時間の実績値を格納している時隔・停止時間データベースと、を備え、
前記運転曲線作成部は、前記ダイヤデータベース及び時隔・停止時間データベースを参照して、前記運転曲線を作成する、
請求項1乃至請求項5のいずれかに記載の列車運行制御装置。 - 自列車が、次の出発駅を出発してから次に停車する前方駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する列車運行制御装置において実行される制御方法であって、
自列車が次の出発駅となるいずれかの駅に到着した時点において、前記自列車、前記自列車の直前を走行する列車である先行列車及び前記自列車の直後を走行する列車である後続列車のそれぞれの次の出発駅を予め設定された運転ダイヤ通りに出発することが可能な状態にあるか否かを判別する過程と、
前記判別の結果に基づいて、前記自列車が、前記次の出発駅を出発してから次に停車する前方駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する過程と、
を備えた制御方法。 - 自列車が、次の出発駅を出発してから次に停車する前方駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する列車運行制御装置をコンピュータにより制御する制御プログラムであって、
前記コンピュータを、
自列車が次の出発駅となるいずれかの駅に到着した時点において、前記自列車、前記自列車の直前を走行する列車である先行列車及び前記自列車の直後を走行する列車である後続列車のそれぞれの次の出発駅を予め設定された運転ダイヤ通りに出発することが可能な状態にあるか否かに基づいて、前記自列車が、前記次の出発駅を出発してから次に停車する前方駅に到着するまでの運転曲線を、累積消費エネルギーを考慮して作成する運転曲線作成手段として機能させる制御プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013250503A JP6453536B2 (ja) | 2013-12-03 | 2013-12-03 | 列車運行制御装置、制御方法及び制御プログラム |
| PCT/JP2014/082036 WO2015083751A1 (ja) | 2013-12-03 | 2014-12-03 | 列車運行制御装置、制御方法及び制御プログラム |
| EP14868529.0A EP3078565A4 (en) | 2013-12-03 | 2014-12-03 | Train operation control device, control method, and control program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013250503A JP6453536B2 (ja) | 2013-12-03 | 2013-12-03 | 列車運行制御装置、制御方法及び制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015107687A true JP2015107687A (ja) | 2015-06-11 |
| JP6453536B2 JP6453536B2 (ja) | 2019-01-16 |
Family
ID=53273512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013250503A Active JP6453536B2 (ja) | 2013-12-03 | 2013-12-03 | 列車運行制御装置、制御方法及び制御プログラム |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3078565A4 (ja) |
| JP (1) | JP6453536B2 (ja) |
| WO (1) | WO2015083751A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017043265A (ja) * | 2015-08-28 | 2017-03-02 | 株式会社日立製作所 | 運行管理装置 |
| WO2018220966A1 (ja) * | 2017-06-02 | 2018-12-06 | 株式会社日立製作所 | 列車運行制御装置 |
| WO2019244307A1 (ja) * | 2018-06-21 | 2019-12-26 | 三菱電機株式会社 | 運転時隔制御装置および運転時隔制御方法 |
| JP2020183145A (ja) * | 2019-05-07 | 2020-11-12 | 株式会社日立製作所 | 輸送計画作成支援システムおよび方法 |
| JP2021165139A (ja) * | 2017-02-22 | 2021-10-14 | 東芝インフラシステムズ株式会社 | 運行制御システム |
| JP2022042138A (ja) * | 2020-09-02 | 2022-03-14 | 株式会社日立製作所 | 列車運転支援システムおよび列車運転支援方法 |
| WO2023199720A1 (ja) * | 2022-04-12 | 2023-10-19 | 株式会社日立製作所 | ダイヤ作成装置、列車制御システム、及びダイヤ作成方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112926782B (zh) * | 2021-03-03 | 2022-02-01 | 西南交通大学 | 一种基于惰行-恒速的地铁速度曲线优化方法 |
| CN115848458B (zh) * | 2022-11-15 | 2024-11-22 | 北京市地铁运营有限公司 | 基于广义四阶段最优策略的延误场景节能时刻表优化方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002204507A (ja) * | 2001-01-05 | 2002-07-19 | Hitachi Ltd | 列車群制御システム、列車群制御方法、車上ato装置及び地上制御装置 |
| JP2004155314A (ja) * | 2002-11-06 | 2004-06-03 | Railway Technical Res Inst | 運転曲線作成装置及び運転曲線作成情報 |
| JP2006143088A (ja) * | 2004-11-24 | 2006-06-08 | Hitachi Ltd | 運転整理装置 |
| JP2013146166A (ja) * | 2012-01-16 | 2013-07-25 | Toshiba Corp | 車両走行制御装置及び車両走行支援装置 |
| JP2013230775A (ja) * | 2012-04-27 | 2013-11-14 | Toshiba Corp | 運行制御装置、運行制御方法及び制御プログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2263993B (en) * | 1992-02-06 | 1995-03-22 | Westinghouse Brake & Signal | Regulating a railway vehicle |
| JPH09104347A (ja) | 1995-10-13 | 1997-04-22 | Hitachi Ltd | 列車制御システム |
| JP5476070B2 (ja) | 2009-07-23 | 2014-04-23 | 株式会社日立製作所 | 列車制御システム |
| WO2011086629A1 (ja) * | 2010-01-18 | 2011-07-21 | 三菱電機株式会社 | 運転支援装置及び自動運転装置 |
| DE102011081993A1 (de) * | 2011-09-01 | 2013-03-07 | Siemens Aktiengesellschaft | Haltezeitberechnungsmodul |
-
2013
- 2013-12-03 JP JP2013250503A patent/JP6453536B2/ja active Active
-
2014
- 2014-12-03 WO PCT/JP2014/082036 patent/WO2015083751A1/ja not_active Ceased
- 2014-12-03 EP EP14868529.0A patent/EP3078565A4/en not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002204507A (ja) * | 2001-01-05 | 2002-07-19 | Hitachi Ltd | 列車群制御システム、列車群制御方法、車上ato装置及び地上制御装置 |
| JP2004155314A (ja) * | 2002-11-06 | 2004-06-03 | Railway Technical Res Inst | 運転曲線作成装置及び運転曲線作成情報 |
| JP2006143088A (ja) * | 2004-11-24 | 2006-06-08 | Hitachi Ltd | 運転整理装置 |
| JP2013146166A (ja) * | 2012-01-16 | 2013-07-25 | Toshiba Corp | 車両走行制御装置及び車両走行支援装置 |
| JP2013230775A (ja) * | 2012-04-27 | 2013-11-14 | Toshiba Corp | 運行制御装置、運行制御方法及び制御プログラム |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017043265A (ja) * | 2015-08-28 | 2017-03-02 | 株式会社日立製作所 | 運行管理装置 |
| JP2021165139A (ja) * | 2017-02-22 | 2021-10-14 | 東芝インフラシステムズ株式会社 | 運行制御システム |
| WO2018220966A1 (ja) * | 2017-06-02 | 2018-12-06 | 株式会社日立製作所 | 列車運行制御装置 |
| JP2018202993A (ja) * | 2017-06-02 | 2018-12-27 | 株式会社日立製作所 | 列車運行制御装置 |
| JP7080019B2 (ja) | 2017-06-02 | 2022-06-03 | 株式会社日立製作所 | 列車運行制御装置 |
| WO2019244307A1 (ja) * | 2018-06-21 | 2019-12-26 | 三菱電機株式会社 | 運転時隔制御装置および運転時隔制御方法 |
| JPWO2019244307A1 (ja) * | 2018-06-21 | 2020-10-22 | 三菱電機株式会社 | 運転時隔制御装置および運転時隔制御方法 |
| US20210129883A1 (en) * | 2018-06-21 | 2021-05-06 | Mitsubishi Electric Corporation | Headway control device |
| US11572090B2 (en) * | 2018-06-21 | 2023-02-07 | Mitsubishi Electric Corporation | Headway control device |
| JP7324042B2 (ja) | 2019-05-07 | 2023-08-09 | 株式会社日立製作所 | 輸送計画作成支援システムおよび方法 |
| JP2020183145A (ja) * | 2019-05-07 | 2020-11-12 | 株式会社日立製作所 | 輸送計画作成支援システムおよび方法 |
| JP2022042138A (ja) * | 2020-09-02 | 2022-03-14 | 株式会社日立製作所 | 列車運転支援システムおよび列車運転支援方法 |
| JP7366866B2 (ja) | 2020-09-02 | 2023-10-23 | 株式会社日立製作所 | 列車運転支援システムおよび列車運転支援方法 |
| WO2023199720A1 (ja) * | 2022-04-12 | 2023-10-19 | 株式会社日立製作所 | ダイヤ作成装置、列車制御システム、及びダイヤ作成方法 |
| JP2023156158A (ja) * | 2022-04-12 | 2023-10-24 | 株式会社日立製作所 | ダイヤ作成装置、列車制御システム、及びダイヤ作成方法 |
| JP7824142B2 (ja) | 2022-04-12 | 2026-03-04 | 株式会社日立製作所 | ダイヤ作成装置、列車制御システム、及びダイヤ作成方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3078565A1 (en) | 2016-10-12 |
| EP3078565A4 (en) | 2017-08-09 |
| JP6453536B2 (ja) | 2019-01-16 |
| WO2015083751A1 (ja) | 2015-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6453536B2 (ja) | 列車運行制御装置、制御方法及び制御プログラム | |
| US6980894B1 (en) | Method of managing interference during delay recovery on a train system | |
| JP2015020637A (ja) | 運転曲線作成装置、運転曲線作成装置の制御方法及び制御プログラム | |
| Bocharnikov et al. | Reduction of train and net energy consumption using genetic algorithms for trajectory optimisation | |
| US6332107B1 (en) | Efficient high density train operations | |
| CN112693505A (zh) | 一种单方向阻塞条件下的地铁列车运行调整方法及系统 | |
| Al Najada et al. | Autonomous vehicles safe-optimal trajectory selection based on big data analysis and predefined user preferences | |
| US20190375441A1 (en) | Controller, system and method for vehicle control | |
| CN108883784A (zh) | 向列车驾驶员提供驾驶建议的方法和列车驾驶员咨询系统 | |
| WO2013088811A1 (en) | Method for optimizing run curve of motion of vehicle and method for determining optical sequence | |
| CN104656452B (zh) | 一种基于矩阵离散的地铁列车优化控制方法及装置 | |
| CN117273371A (zh) | 基于虚拟耦合的重载列车群组运行轨迹优化方法及系统 | |
| JP2021121149A (ja) | 列車制御装置、及び列車制御方法 | |
| KR101776788B1 (ko) | 무선통신기반 열차제어시스템을 위한 계층구조 정적속도프로파일 계산방법 및 장치 | |
| Gill et al. | Simulation analysis of transmission-based signalling systems for metro applications | |
| JP6599775B2 (ja) | 列車蓄電池制御装置、方法及びプログラム | |
| CN115859476B (zh) | 一种高速磁悬浮列车速度曲线生成优化方法 | |
| JP5512193B2 (ja) | 列車制御方法、列車制御装置、および車両 | |
| CN112329340A (zh) | 一种常导高速磁浮单向运行线路辅助停车区布置优化方法 | |
| Liang et al. | Energy-efficient handling of electric multiple unit based on maximum principle | |
| CN103101559B (zh) | 一种基于跟驰行为质量评估的全速域列车间隔实时控制方法 | |
| JP2018007497A (ja) | 走行パターン作成装置及び走行パターン作成方法 | |
| KR101193067B1 (ko) | 자동운행 차량 시스템에서 차량의 경로를 제어하는 제어 시스템 및 제어 방법 | |
| Matsuura et al. | Optimal train speed profiles by dynamic programming with parallel computing and the fine-tuning of mesh | |
| JP7049166B2 (ja) | 直流き電電圧制御装置、直流き電電圧制御方法、および直流き電電圧制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20151102 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170905 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170911 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170912 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6453536 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |