JP2015128548A - 光走査型内視鏡 - Google Patents
光走査型内視鏡 Download PDFInfo
- Publication number
- JP2015128548A JP2015128548A JP2014002186A JP2014002186A JP2015128548A JP 2015128548 A JP2015128548 A JP 2015128548A JP 2014002186 A JP2014002186 A JP 2014002186A JP 2014002186 A JP2014002186 A JP 2014002186A JP 2015128548 A JP2015128548 A JP 2015128548A
- Authority
- JP
- Japan
- Prior art keywords
- optical scanning
- optical fiber
- piezoelectric actuator
- optical
- electrode group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Abstract
【解決手段】光走査型内視鏡を、支持部材と、支持部材の一部の面に接着され、接着された面で支持部材に支えられる振動部材と、振動部材に取り付けられており、射出端より照射光が射出される光ファイバと、振動部材の表面であって支持部材に接着されていない非接着領域に形成されており、印加される駆動電圧に従って振動部材を振動させるための第1の電極群と、から構成する。
【選択図】図6
Description
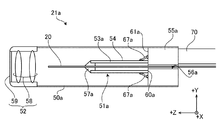
以下、図面を参照して、本発明の第1の実施形態の光走査型内視鏡について説明する。
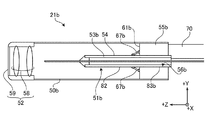
次に、本発明の第2の実施形態にかかる内視鏡システムについて説明する。第2の実施形態にかかる内視鏡システムは、光走査ユニット21bの構成が異なること以外は、第1の実施形態の内視鏡システム100と同じである。
21a、21b 光走査ユニット
22 走査ドライバ
23 光コネクタ
24 電気コネクタ
25 サブCPU
26 サブメモリ
30 光源
31 光ファイバ
32 光分波合波器
33 光ファイバ
34 光ファイバ
35 受光器
36 信号処理回路
37 CPU
38 CPUメモリ
50a、50b 円筒部材
51a、51b 圧電アクチュエータ
52 光学系
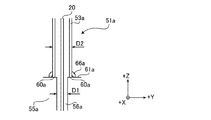
53a、53b 圧電体
54、54X、54X´、54Y、54Y´ 電極
55a、55b マウント部材
56a、56b 貫通孔
57a、57b 接着剤
58 レンズユニット
59 カバーガラス
60a 端面
61a、61b 端面
62a 溜まり溝
63a 突起状縁部
64a 電極パターン
65a、65b 平坦面
66a、66b ハンダ(または導電性接着剤)
67a、67b 導線
68a ケーブル
70 フレキシブルケーブル
82 領域
83 領域
100 内視鏡システム
200 光走査型内視鏡
300 プロセッサ部
400 モニタ
500 光走査型内視鏡
520 光ファイバ
554 電極
550 円筒部材
551 圧電アクチュエータ
553 圧電体
555 マウント部材
556 貫通孔
566 ケーブル
Claims (6)
- 支持部材と、
前記支持部材の一部の面に接着され、接着された面で該支持部材に支えられる振動部材と、
前記振動部材に取り付けられており、射出端より照射光が射出される光ファイバと、
前記振動部材の表面であって前記支持部材に接着されていない非接着領域に形成されており、印加される駆動電圧に従って該振動部材を振動させるための第1の電極群と、を備える、
光走査型内視鏡。 - 前記振動部材は、前記支持部材に形成された貫通孔に挿入され通されており、
前記貫通孔内に位置する前記振動部材の外周面は、該貫通孔の内周面と接着されている、
請求項1に記載の光走査型内視鏡。 - 前記支持部材の表面に形成されており、前記第1の電極群とそれぞれ電気的に接続された第2の電極群を更に備え、
前記振動部材は、前記第2の電極群を介して前記第1の電極群に印加される駆動電圧に従って振動する、
請求項1または請求項2に記載の光走査型内視鏡。 - 前記第1の電極群と前記第2の電極群とは、可撓性を有する導線によって電気的に接続されている、
請求項3に記載の光走査型内視鏡。 - 前記振動部材は、前記第1の電極群に印加される駆動電圧に従って振動する圧電体である、
請求項1から請求項4のいずれか一項に記載の光走査型内視鏡。 - 前記光ファイバは、前記振動部材に形成された中空部に挿入され通された上で、該振動部材に取り付けられている、
請求項1から請求項5のいずれか一項に記載の光走査型内視鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014002186A JP2015128548A (ja) | 2014-01-09 | 2014-01-09 | 光走査型内視鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014002186A JP2015128548A (ja) | 2014-01-09 | 2014-01-09 | 光走査型内視鏡 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015128548A true JP2015128548A (ja) | 2015-07-16 |
Family
ID=53759815
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014002186A Pending JP2015128548A (ja) | 2014-01-09 | 2014-01-09 | 光走査型内視鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015128548A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108882831A (zh) * | 2016-03-31 | 2018-11-23 | 国立大学法人东北大学 | 光学成像装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008504557A (ja) * | 2004-06-28 | 2008-02-14 | ユニヴァーシティ オブ ワシントン | マルチモードの光画像化方法及びその光ファイバスキャナ |
| JP2013180078A (ja) * | 2012-03-02 | 2013-09-12 | Hoya Corp | 光走査型内視鏡 |
| JP2013192825A (ja) * | 2012-03-22 | 2013-09-30 | Hoya Corp | 光走査型内視鏡 |
| WO2013172509A1 (ko) * | 2012-05-17 | 2013-11-21 | 한국생산기술연구원 | Pzt를 이용한 oct 프로브 |
-
2014
- 2014-01-09 JP JP2014002186A patent/JP2015128548A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008504557A (ja) * | 2004-06-28 | 2008-02-14 | ユニヴァーシティ オブ ワシントン | マルチモードの光画像化方法及びその光ファイバスキャナ |
| JP2013180078A (ja) * | 2012-03-02 | 2013-09-12 | Hoya Corp | 光走査型内視鏡 |
| JP2013192825A (ja) * | 2012-03-22 | 2013-09-30 | Hoya Corp | 光走査型内視鏡 |
| WO2013172509A1 (ko) * | 2012-05-17 | 2013-11-21 | 한국생산기술연구원 | Pzt를 이용한 oct 프로브 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108882831A (zh) * | 2016-03-31 | 2018-11-23 | 国立大学法人东北大学 | 光学成像装置 |
| US10959608B2 (en) | 2016-03-31 | 2021-03-30 | Tohoku University | Optical imaging device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5883683B2 (ja) | 光走査型内視鏡 | |
| CN105593742B (zh) | 光纤扫描仪、照明装置和观察装置 | |
| JP6438221B2 (ja) | 光走査用アクチュエータおよび光走査装置 | |
| JP6274949B2 (ja) | 光ファイバスキャナ、照明装置および観察装置 | |
| CN104956251B (zh) | 光扫描装置 | |
| US9874739B2 (en) | Optical fiber scanner, illumination apparatus, and observation apparatus | |
| US10330916B2 (en) | Optical-fiber scanner, illumination apparatus, and observation apparatus | |
| US20170176742A1 (en) | Optical fiber scanner, illuminating device, and observation apparatus | |
| JPWO2015163001A1 (ja) | 光走査装置及び走査型内視鏡 | |
| JPWO2016079769A1 (ja) | 光走査用アクチュエータ及び光走査装置 | |
| JP2015139537A (ja) | 光走査型内視鏡 | |
| JP2015112278A (ja) | 光走査装置および光走査型観察装置 | |
| WO2018109883A1 (ja) | 光ファイバスキャナ、照明装置および観察装置 | |
| US20180252910A1 (en) | Optical fiber scanner, illumination device, and observation device | |
| JP2015128548A (ja) | 光走査型内視鏡 | |
| JP6006127B2 (ja) | 光走査装置 | |
| JP2015128549A (ja) | 光走査型内視鏡 | |
| CN105263387A (zh) | 扫描型内窥镜 | |
| JP6103871B2 (ja) | 光ファイバスキャナ | |
| WO2017216866A1 (ja) | 光ファイバスキャナ、照明装置および観察装置 | |
| JP2015146910A (ja) | 光走査型内視鏡 | |
| US20190235231A1 (en) | Optical fiber scanner, illumination device, and observation device | |
| JP2015136459A (ja) | 光走査型内視鏡および光走査型内視鏡を有する内視鏡システム | |
| JP2015112307A (ja) | 光走査型内視鏡および光走査型内視鏡を有する内視鏡システム | |
| JPWO2017068924A1 (ja) | 光ファイバスキャナ、照明装置および観察装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170605 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170717 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171124 |