以下、本発明に係る車両の制御装置を、過給機を備えた内燃機関の車両の制御装置に適用した実施の形態について、図面を参照して説明する。
なお、本発明において、好適には、駆動力源としては、例えば、内燃機関等のエンジンが用いられるが、電動機等の他の原動機を単独で或いはエンジンと組み合わせて採用することもできる。
また、好適には、自動変速機は、例えば、複数のギヤ段が択一的に達成される公知の遊星歯車式自動変速機、二軸間に備えられた常時噛み合う複数対の変速ギヤの何れかを油圧アクチュエータにより駆動される同期装置によって択一的に動力伝達状態とすることでギヤ段が自動的に切換られる公知の同期噛合型平行二軸式自動変速機、入力軸を2系統備えて各系統の入力軸にクラッチがそれぞれ繋がり更にそれぞれ偶数段と奇数段へと繋がっている型式の同期噛合型平行二軸式自動変速機(DCT)、変速比が無段階に連続的に変化させられる公知のベルト式無段変速機やトラクション型無段変速機、或いは電気的に変速比が変更される公知の電気式無段変速機などにより構成される。また、自動変速機の車両に対する搭載姿勢は、その自動変速機の軸線が車両の左右方向に延びるフロントエンジン・フロントドライブ(FF)方式の車両などの横置きエンジン型でも、その自動変速機の軸線が車両の前後方向に延びるフロントエンジン・リヤドライブ(FR)方式の車両などの縦置きエンジン型の何れでも良い。
まず、構成について説明する。
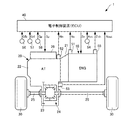
図1は、本発明が適用される車両1に備えられたエンジン(ENG)10からトランスアクスルケース(AT)20を経て一対の駆動輪30に至る動力伝達経路の概略構成を説明する図であると共に、車両1に設けられた電子制御装置(ECU)40を中核とする制御系統の要部を説明する図である。
図1において、トランスアクスルケース20は、例えば、図示しないボルト止め等によって車両1の車体に取り付けられる。トランスアクスルケース20は、内部に、エンジン10と、トルクコンバータ21および自動変速機22等を備えている。また、トランスアクスルケース20は、自動変速機22の出力回転するギア部材と噛み合うデフリングギヤ23を一体的に備える差動歯車装置24を有する。この差動歯車装置24には、一対の駆動輪30と一端を連結した一対の車軸25を連結している。
これにより、駆動力源としてのエンジン10の動力は、トルクコンバータ21、自動変速機22、差動歯車装置24、一対の車軸25等を順次介して一対の駆動輪30へと伝達される。
自動変速機22は、エンジン10から駆動輪30までの動力伝達経路の一部を構成し、複数組の遊星歯車装置の回転要素が複数の油圧式摩擦係合装置の何れかによって選択的に連結されることにより各々異なるギヤ比(変速比)を有する複数のギヤ段(変速段)が択一的に成立させられる遊星歯車式自動変速機である。例えば、自動変速機22は、公知の車両1に用いられる所謂クラッチツゥクラッチ変速を行う有段式自動変速機であり、運転者のアクセル操作や車速V等に応じて各ギヤ段が成立させられる。
電子制御装置(ECU)40は、例えば、CPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより車両1の各種制御を実行する。
電子制御装置40は、例えば、エンジン10の出力制御や自動変速機22の変速制御などに関連する制御装置を統合的に含んでおり、エンジン10の出力制御、自動変速機22の変速制御等を実行するようになっている。なお、電子制御装置40は、必要に応じてエンジン制御用や油圧制御用(変速制御用)等に分けて構成されてもよい。
電子制御装置40には、各種センサ類、例えば、エンジン回転速度センサ51、変速機入力回転速度センサ52、変速機出力回転速度センサ53、アクセル開度センサ54、スロットル弁開度センサ55、前後加速度センサ56、左右加速度センサ57、アンチロックブレーキシステム(以下、単に「ABS」とも称する)58等が接続されている。
これにより、各センサ類で検出された各種信号、例えば、エンジン回転速度Ne、変速機入力回転速度Nin、後述する車速Vに対応する変速機出力回転速度Nout、アクセル開度Acc、スロットル弁開度θth、車両1の前後方向の加速度(前後G)である前後加速度Gfb、車両1の左右方向の加速度(左右G)である左右加速度Grl、ABS作動信号Gp等がそれぞれ供給される。また、電子制御装置40からは、例えば、エンジン10の出力制御のためのエンジン出力制御指令信号Se、自動変速機22の変速制御のために油圧制御回路26を作動させるための油圧指令信号Spなどが、それぞれ出力される。
図2は、電子制御装置40による制御機能の要部を説明する機能ブロック線図である。
図2において、電子制御装置40は、自動変速機22の変速制御を実行する変速制御部41と、エンジン10の駆動を制御するエンジン出力制御部42と、後述するギヤ段決定制御の開始条件が成立したか否かを判定する開始条件成立判定部43と、ギヤ段決定制御の開始条件が成立した際の実際の車速Vを制御開始車速として保持する制御開始車速保持部44と、ギヤ段決定制御の開始条件が成立した際に後述する再加速時駆動力要求割合を求める再加速時駆動力要求割合決定部45と、再加速時駆動力要求割合に基づいて自動変速機22のギヤ段を求める減速時ギヤ段決定部46と、ギヤ段決定制御の終了条件が成立したか否かを判定する終了条件成立判定部47と、を有する。
ここで、電子制御装置40は、例えば、自動変速機22のギヤ段(ギヤ比も同意)を決定することに加え、車両減速中の減速度(減速Gともいう)に基づいて自動変速機22のギヤ段を決定する機能を有している。つまり、電子制御装置40は、再加速時の駆動要求量を再加速時駆動力要求割合(例えば、再加速時のアクセルペダルの踏み込み量)として実現するための自動変速機22のギヤ段を減速Gに基づいて決定する機能を有している。具体的には、コーナ進入時の減速Gに基づいて、コーナを抜けた後の立ち上がりにおける運転者の加速意図にあった自動変速機22のギヤ段を決定する。
ところで、コーナ進入時の減速Gと再加速時駆動力要求割合とは相関関係があり、その減速Gが大きい程、再加速時駆動力要求割合が大きくなる。
すなわち、図3(A)に示すように、コーナに進入する手前の直線区間からコーナを抜けて立ち上がる(再加速する)までの走行区間は、コーナへの進入に備えて減速する減速区間[1]、コーナ進入後からコーナ頂点Pまでの旋回(進入側)区間[2]、コーナ頂点Pからコーナ出口までの旋回(立ち上がり)区間[3]、コーナ出口から再加速する加速区間[4]の4つに大別することができる。
図3(B)、(C)に示すように、減速区間[1]のコーナ進入時では、専ら前後Gが減速Gとなる。また、旋回(G進入側)区間[2]及び旋回(立ち上がり)区間[3]のコーナ旋回時では、前後Gと左右Gとの合成加速度(合成Gという)が減速Gとなる。さらに、加速区間[4]のコーナ立ち上がり時では、専ら前後Gが加速度となる。そして、減速区間[1]における前後G(実際には合成G)の減速Gは、コーナ進入まで(旋回区間[2]に達するまで)、そのピーク値(最大減速度)が更新される。
そのため、本実施の形態では、前後G(合成G)がピーク値となったときの減速G(以下、減速ピークGという)に基づいて再加速時駆動力要求割合を求める。つまり、減速ピークGが更新される毎に、減速ピークGに基づいて再加速時駆動力要求割合を逐次更新する。
減速ピークGに基づいて求められた再加速時駆動力要求割合は、例えば、駆動要求量の絶対値で表しても良いが、車種毎の適合を考えると、例えば、そのときの車速Vにおいて発生させることが可能な最大駆動力に対する、コーナ立ち上がりの際に推測される再加速時の目標駆動力の割合で表すことが好適である。
そこで、電子制御装置40は、このコーナ立ち上がりの際に推測される再加速時の目標駆動力の割合を再加速時駆動力要求割合として求め(以下、この求めた再加速時駆動力要求割合を「基本要求加速度割合η」[%]と称する)を実現することができる自動変速機22のギヤ段を求める。例えば、電子制御装置40は、この基本要求加速度割合ηを実現することができる自動変速機22のギヤ段のうちの最高車速側のギヤ段(最ハイギヤ段)を求める。
図4は、各ギヤ段(例えば、第1速ギヤ段−第4速ギヤ段)毎に実現することができる車両駆動力(車両加速度)と車速Vとの予め定められた関係(ギヤ段毎駆動力マップ)上に基本要求加速度割合ηを示す図である。
図4において、例えば、ある車速Vにおいて基本要求加速度割合ηが点Aの状態である場合、電子制御装置40は、その基本要求加速度割合ηを実現することができる第1速ギヤ段1st及び第2速ギヤ段2ndのうちの最ハイギヤ段である第2速ギヤ段2ndをコーナ立上がり時の自動変速機22のギヤ段として選択する。
ところで、減速ピークGの値が同様であっても、運転者の減速意図(例えば、減速の仕方)によっては、再加速意図は異なると考えられる。例えば、図5に示すように、減速ピークGの値が同様であっても、比較的短時間で減速する減速パターンの方が、比較的長時間で減速する減速パターンよりも運転者の減速意図が強く、再加速意図も強いと考えられる。そのため、減速ピークGに基づいて求めた基本要求加速度割合ηにて一律に設定した自動変速機22のギヤ段では、運転者の再加速意図と合わない可能性があり、再加速時のアクセル踏み込みによって更なるダウンシフトが必要となったり、反対に最適のギヤ段よりもギヤ比が低いギヤ段が選択されるために再加速時に運転者が違和感を感じたりする可能性がある。
また、最適のギヤ段よりもギヤ比が低いギヤ段が選択された場合は、減速中に不要なダウンシフトを実行していることにもなる。本実施例では、前後Gの時間積分値(図5の斜線部分)が大きい程、運転者の減速意図は大きい。
そこで、本実施例の電子制御装置40は、前述した減速ピークGに基づいて自動変速機22のギヤ段を求める制御(減速ピークGに基づくギヤ段決定制御と称す)の開始条件が成立してから減速ピークGが求められるまでの前後Gの時間積分値に基づいて、基本要求加速度割合ηを補正した最終要求加速度割合ηmを算出する。
例えば、電子制御装置40は、減速意図が比較的強い場合にはローギヤ側が設定され易く、減速意図が比較的弱い場合にはローギヤ側が設定され難くされるように、前後Gの時間積分値が小さい場合は、前後Gの時間積分値が大きい場合よりも再加速時駆動力要求割合を小さくするように補正した最終要求加速度割合ηmを適用する。
前後Gの時間積分値は、減速ピークGに基づくギヤ段決定制御の開始条件が成立してから前後Gがピーク値に到達するまでの車速Vの変化量、すなわちギヤ段決定制御の開始条件が成立したときの車速(制御開始車速)と減速ピークGが求められたときの車速(減速ピークG車速)との差分に当たる車速変化量(=制御開始車速−減速ピークG車速)に相当するものである。
図6は、前後Gの時間積分値に相当する車速変化量をパラメータとして、減速ピークGと基本要求加速度割合ηとの予め定められた関係(再加速時駆動力要求割合補正マップ)を示す図である。図6において、実線で示すベース値は、例えば、再加速意図が強い理想的な減速パターン(図5参照)、具体的には熟練したドライバがスポーツ走行を極めるときの減速の仕方として予め定められた減速パターンの場合に、減速ピークGと基本要求加速度割合ηとの予め定められた対応関係である。
一方、図7に示すように、減速区間[1]での運転者の減速意図が強いと、特に前後Gの変化も急激となり、ABS58が作動する。そこで、電子制御装置40は、このような運転者による減速意図が大きく、ABS58が作動した場合、基本要求加速度割合ηに対して予め定めた駆動力要求割合補正係数Kを乗算して、最終要求加速度割合ηmを求める。
以下、図2および他の図面を用いて本実施の形態における電子制御装置40の各部構成の機能を説明する。
具体的には、変速制御部41は、例えば、図8に示すアップシフト線(実線)とダウンシフト線(破線)とを有する予め定められた関係(変速マップ)から実際の車速V及びアクセル開度Accで示される車両状態に基づいて自動変速機22のギヤ段を決定し、その決定したギヤ段が得られるように自動変速機22の自動変速制御を実行する油圧指令信号Spを油圧制御回路26へと出力する。
エンジン出力制御部42は、アクセル開度Accをパラメータとして、車速Vと目標駆動力との関係を予め実験的或いは設計的に求めて記憶された駆動力マップ(不図示)を有し、この駆動力マップと、実際のアクセル開度Acc及び車速Vとに基づいて、車両1に対する運転者の駆動要求量(すなわちドライバ要求量)としての目標駆動力を算出する。この駆動力マップは、例えば、車速Vが小さい程、また、アクセル操作量Accが大きい程、目標駆動力が大きくなるように設定されている。
エンジン出力制御部42は、伝達損失、補機負荷、自動変速機22のギヤ段等を考慮して、その目標駆動力が得られるエンジン10の出力トルク(エンジントルク)Teとなるように、スロットルアクチュエータにより電子スロットル弁を開閉制御する他、燃料噴射装置による燃料噴射量や噴射時期を制御し、点火装置による点火時期を制御するエンジン出力制御指令信号Seを出力する。
駆動要求量としては、駆動輪30における目標駆動力[N]の他に、駆動輪30における目標駆動トルク[Nm]や目標駆動パワー[W]、自動変速機22の出力回転部材における目標変速機出力トルク、目標エンジントルク等を用いることもできる。また、駆動要求量として、単にアクセル開度Acc[%]やスロットル弁開度θth[%]やエンジン10の吸入空気量[g/sec]等を用いることもできる。
開始条件成立判定部43は、減速ピークGに基づくギヤ段決定制御の開始条件が成立したか否かを判定する。例えば、開始条件成立判定部43は、前後Gが減速走行に移行していることを確実に判断できるための予め定められた前後G判定値以上となったか否かに基づいて、ギヤ段決定制御の開始条件が成立したか否かを判定する。
制御開始車速保持部44は、開始条件成立判定部43によりギヤ段決定制御の開始条件が成立したと判定された場合は、その時の実際の車速Vを制御開始車速として保持する。
再加速時駆動力要求割合決定部45は、開始条件成立判定部43によりギヤ段決定制御の開始条件が成立したと判定された場合は、例えば、図6に示すような再加速時駆動力要求割合補正マップにおけるベース値(実線)から、実際の減速ピークGに基づいて基本要求加速度割合ηを求める。
再加速時駆動力要求割合決定部45は、制御開始車速保持部44により保持されている制御開始車速と基本要求加速度割合ηを求めた時点の車速Vである減速ピークG車速との差分に当たる車速変化量を算出する。
また、再加速時駆動力要求割合決定部45は、例えば、図6に示すような再加速時駆動力要求割合補正マップからその車速変化量に基づいて基本要求加速度割合ηを補正して最終要求加速度割合ηmを求める。なお、制御作動においては、減速ピークGが更新される毎に基本要求加速度割合ηが求められるので、その都度、最終要求加速度割合ηmも補正される。
減速時ギヤ段決定部46は、例えば、図4に示すようなギヤ段毎駆動力マップから再加速時駆動力要求割合決定部45により求められた最終要求加速度割合ηmに基づいて、その最終要求加速度割合ηmを出力可能な自動変速機22の最ハイギヤ段を求める。
一方、ABS58が作動した場合、再加速時駆動力要求割合決定部45は、図9(A)に示すABS作動時の減速Gに応じて予め定めた駆動力要求割合補正係数Kで基本要求加速度割合ηを乗算し、最終要求加速度割合ηmを求める(ηm=η×K)。
なお、駆動力要求割合補正係数Kは、図9(A)に示すように、曲線グラフとしてもよいが、例えば、図9(B),(C)に示すように、ABS作動時の減速Gの値が低いときは駆動力要求割合補正係数K=0とすることで従来通りダウンシフトを禁止することもできる。また、例えば、ABS作動時の減速Gの値がある程度高い場合、駆動力要求割合補正係数K=1とすることで減速Gによる補正をしないようにすることもできる。
また、減速Gの変化により、例えば、目標ギヤ段をHigh側に変更(例えば、1⇒2)したときには、その後の走行状況によって再びLow側(例えば、2⇒1)に変更する可能性が高いので、このような場合には、駆動力要求割合補正係数Kを用いた最終要求加速度割合ηmは更新せず、そのままの最終要求加速度割合ηmを用いるのが好ましい。
したがって、駆動力要求割合補正係数Kは、何れの場合においても、ABS58の作動時の減速度(減速G)が小さい場合には、減速度(減速G)が大きい場合と比較して、再加速時の最終要求加速度割合ηmが小さくなるように予め設定されている。
この構成により、路面状況などの車両の走行環境に応じて、再加速時の最終要求加速度割合ηmを実現する自動変速機のギヤ比を決定することができ、所望の駆動力を得ることができる。
終了条件成立判定部47は、減速ピークGに基づくギヤ段決定制御の終了条件が成立したか否かを判定する。例えば、終了条件成立判定部47は、加速度がコーナを立ち上がった加速走行に移行していることを確実に判断できるための予め定められた加速度判定値以上となったか否かに基づいて、ギヤ段決定制御の終了条件が成立したか否かを判定する。
図10は、図2に示す電子制御装置40の制御作動の要部すなわち減速意図に応じてギヤ比を適切に設定し、再加速時のドライバビリティを向上させるための制御作動を説明するフローチャートである。なお、電子制御装置40は、この図10に示したルーチンを、例えば、数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返して実行する。
ステップS1において、電子制御装置40は、開始条件成立判定部43からの条件成立判定信号を受信すると、制御開始車速保持部44を用いて、ギヤ段決定制御の開始条件が成立した際の実際の車速Vを制御開始車速として保持するとともに、再加速時駆動力要求割合決定部45を用いて、基本要求加速度割合ηを求め、さらにこれを補正して最終要求加速度割合ηmを求め、ステップS2へ移行する。
ステップS2において、電子制御装置40は、ABS58が作動中であるか否かを判定する。電子制御装置40は、ABS58が作動中であると判定した場合には、ステップS3へと移行する。一方、電子制御装置40は、ABS58が作動中であると判定しなかった場合には、ステップS6へ移行する。
ステップS3において、電子制御装置40は、最終要求加速度割合ηmに対して、ABS58の作動中における減速Gから駆動力要求割合補正係数Kを算出し、ステップS4へ移行する。
ステップS4において、電子制御装置40は、ステップS1で求めた基本要求加速度割合ηにステップS3で求めた駆動力要求割合補正係数Kを乗算して、最終要求加速度割合ηmを補正(ηm=η×K)し、ステップS5へ移行する。
ステップS5において、電子制御装置40は、駆動力要求割合補正係数Kを用いて補正した後の最終要求加速度割合ηmより目標ギヤ段を決定し、ステップS6へ移行する。
ステップS6において、電子制御装置40は、目標ギヤ段がそれまでの目標ギヤ段よりもHigh側になるか否か、左右Gによる旋回判定が成立しているか、等の目標ギヤ段を更新せずにもとのまま保持する条件があるか否かを判定し、保持条件ありと判定した場合にはステップS7へと移行し、保持条件ありと判定しなかった場合にはステップS8へと移行する。
ステップS7において、電子制御装置40は、目標ギヤ段を更新せずにもとのまま保持する条件があると判定したことから、終了条件成立判定部47によりギヤ段決定制御の終了条件が成立したと判定したことに基づいて、変速制御部41を用いて、更新しない油圧指令信号Spを油圧制御回路26へと出力させるとともに、エンジン出力制御部42を用いて、点火装置による点火時期を更新しないエンジン出力制御指令信号Seを出力させて、減速時ギヤ段決定部46により求められた自動変速機22のギヤ段の保持を解除し、通常の変速制御(例えば、図8の変速マップに応じた変速制御)に復帰する。
一方、ステップS8において、電子制御装置40は、終了条件成立判定部47によりギヤ段決定制御の終了条件が成立したと判定されるまでは、変速制御部41を用いて、更新した油圧指令信号Spを油圧制御回路26へと出力させるとともに、エンジン出力制御部42を用いて、点火装置による点火時期を更新したエンジン出力制御指令信号Seを出力させて、減速時ギヤ段決定部46により求められた自動変速機22のギヤ段へ更新し、その更新したギヤ段を保持する。
この構成により、本実施の形態に係る車両の制御装置としての電子制御装置40は、アンチロックブレーキシステムの作動時であっても、減速意図に応じてギヤ比を適切に設定し、コーナ旋回後の再加速時にドライバビリティ(例えば、再加速意図に応じた加速性能)が悪化するのを低減することができる。
このように、ABS58が作動中の減速Gは路面状態を反映しているとみなせるので,減速Gから路面状況を推定することができる。一方、車両が前後G及び左右Gで不安定になるのは、再加速時の駆動力要求割合が路面状況を超えたときである。換言すれば、駆動力要求割合を路面状態に相応した値に補正することで、車両として不安定にならず、路面に応えた駆動力を得ることができる。
なお、以上説明した実施の形態は減速ピークGが更新される毎に再加速時駆動力要求割合を更新するものとしたが、例えば、旋回に入ったらこの更新処理を停止し、この時点での変速比yを保持するようにしてもよい。これにより、旋回中の変速が回避される。
また、上記実施の形態では、コーナを立ち上がった後に、変速比保持を解除して通常の変速制御に復帰するものとした。これに限らず、例えば、コーナが終了したときに変速制御に復帰するようにしてもよい。ここで、コーナが終了したときとは、コーナが終了したと判断できるための予め定められたコーナ終了判定値を左右Gが下回った場合である。
さらに、上記実施の形態では、前後加速度センサ56によって検出されている車両の前後方向の加速度(減速ピークG)によって運転者の減速意図を推定するようにしていた。本発明はこれに限らず、例えば、ブレーキペダルの踏み込み量を検出するブレーキペダルセンサからの出力信号に基づいてブレーキペダルのブレーキON操作がなされている場合に限り、前後加速度センサ56によって検出されている車両の前後方向の加速度(減速ピークG)によって運転者の減速意図を推定するようにしてもよい。これにより、運転者の減速意図を正確に推定することができる。
以上のように、本発明に係る車両の制御装置は、アンチロックブレーキシステムの作動時であっても、減速意図に応じてギヤ比を適切に設定し、コーナ旋回後の再加速時にドライバビリティ(例えば、再加速意図に応じた加速性能)が悪化するのを低減することができるという効果を有し、アンチロックブレーキシステムを搭載した車両におけるギヤ比の制御装置として有用である。