JP2015147629A - クレーン吊荷の振れ角検出装置 - Google Patents
クレーン吊荷の振れ角検出装置 Download PDFInfo
- Publication number
- JP2015147629A JP2015147629A JP2014020101A JP2014020101A JP2015147629A JP 2015147629 A JP2015147629 A JP 2015147629A JP 2014020101 A JP2014020101 A JP 2014020101A JP 2014020101 A JP2014020101 A JP 2014020101A JP 2015147629 A JP2015147629 A JP 2015147629A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- side sensor
- base point
- position information
- crane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Control And Safety Of Cranes (AREA)
Abstract
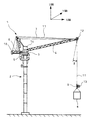
【解決手段】巻上ワイヤロープ11が吊り下げられる基点となるジブ4の先端に、該基点におけるX軸、Y軸、Z軸方向の位置情報を検出する基点側センサ12を取り付け、巻上ワイヤロープ11下端の吊具9に、該吊具9におけるX軸、Y軸、Z軸方向の位置情報を検出する吊具側センサ13を取り付け、基点側センサ12で検出した位置情報と前記吊具側センサ13で検出した位置情報との差分に基づき吊具9の振れ角θを演算装置14で求める。
【選択図】図1
Description
前記ワイヤロープが吊り下げられる基点におけるX軸、Y軸、Z軸方向の位置情報を検出する基点側センサと、
前記ワイヤロープ下端の吊具におけるX軸、Y軸、Z軸方向の位置情報を検出する吊具側センサと、
前記基点側センサで検出した位置情報と前記吊具側センサで検出した位置情報との差分に基づき前記吊具の振れ角を求める演算装置と
を備えたことを特徴とするクレーン吊荷の振れ角検出装置にかかるものである。
αAT(X)
αAT(Y)
αAT(Z)
とし、吊具側センサ13で検出される吊具におけるX軸、Y軸、Z軸方向の位置情報としての加速度を
αAB(X)
αAB(Y)
αAB(Z)
とすると、加速度を時間で一回積分すれば速度が得られ、二回積分すれば位置が得られるため、図2に示すX軸とZ軸を含む鉛直面に投影される、前記基点側センサ12及び吊具側センサ13間での鉛直方向距離Hは、巻上ウインチ10のドラム軸エンコーダ(図示せず)の出力によって算出される巻上揚程をH0とすると、
H=H0−(∬αAT(Z)dt−∬αAB(Z)dt)
として求められ、前記基点側センサ12及び吊具側センサ13間での水平方向距離X成分LXは、
LX=∬αAT(X)dt−∬αAB(X)dt
として求められ、振れ角X成分θXは、
θX=tan−1(LX/H)
として求められる。前述と同様に、図2に示すY軸とZ軸を含む鉛直面に投影される、前記基点側センサ12及び吊具側センサ13間での水平方向距離Y成分LYは、
LY=∬αAT(Y)dt−∬αAB(Y)dt
として求められ、振れ角Y成分θYは、
θY=tan−1(LY/H)
として求められる。そして、図2に示すX軸とY軸を含む水平面に投影される、前記基点側センサ12及び吊具側センサ13間での水平方向距離Lは、
L=√(LX 2+LY 2)
として求められる。これより、実際の振れ角θは、
θ=tan−1(L/H)
として求められる。
θAT(X)
θAT(Y)
θAT(Z)
とし、吊具側センサ13で検出される吊具におけるX軸、Y軸、Z軸方向の位置情報として、X軸周り、Y軸周り、Z軸周りの角度をそれぞれ
θAB(X)
θAB(Y)
θAB(Z)
とすると、図2に示すθXはY軸周りの角度となるため、
θX=θAT(Y)−θAB(Y)
となり、図2に示すθYはX軸周りの角度となるため、
θY=θAT(X)−θAB(X)
となり、実際の振れ角θは、
θ=√(θX 2+θY 2)
として求められる。尚、三軸ジャイロセンサの場合、吊具側センサ13だけで振れ角が求まってしまうが、基点側と吊具側両方に加わる外乱としての加速度成分を除去する目的で差分をとっている。
4 ジブ
8 吊荷
9 吊具
11 巻上ワイヤロープ(ワイヤロープ)
12 基点側センサ
13 吊具側センサ
14 演算装置
θ 振れ角
Claims (5)
- 巻上げ下げ自在に吊り下げられるワイヤロープの下端に吊荷を保持する吊具が取り付けられたクレーン吊荷の振れ角検出装置であって、
前記ワイヤロープが吊り下げられる基点におけるX軸、Y軸、Z軸方向の位置情報を検出する基点側センサと、
前記ワイヤロープ下端の吊具におけるX軸、Y軸、Z軸方向の位置情報を検出する吊具側センサと、
前記基点側センサで検出した位置情報と前記吊具側センサで検出した位置情報との差分に基づき前記吊具の振れ角を求める演算装置と
を備えたことを特徴とするクレーン吊荷の振れ角検出装置。 - 前記基点側センサで検出した位置情報と前記吊具側センサで検出した位置情報とを前記演算装置へ無線で送信する請求項1記載のクレーン吊荷の振れ角検出装置。
- 前記基点側センサと吊具側センサとをそれぞれ三軸加速度センサとし、前記基点におけるX軸、Y軸、Z軸方向の位置情報と、前記吊具におけるX軸、Y軸、Z軸方向の位置情報とをそれぞれ前記三軸加速度センサで検出される加速度に基づいて特定する請求項1又は2記載のクレーン吊荷の振れ角検出装置。
- 前記基点側センサと吊具側センサとをそれぞれ三軸ジャイロセンサとし、前記基点におけるX軸、Y軸、Z軸方向の位置情報と、前記吊具におけるX軸、Y軸、Z軸方向の位置情報とをそれぞれ前記三軸ジャイロセンサで検出される角度に基づいて特定する請求項1又は2記載のクレーン吊荷の振れ角検出装置。
- 前記基点側センサと吊具側センサとをそれぞれGPS受信機とし、前記基点におけるX軸、Y軸、Z軸方向の位置情報と、前記吊具におけるX軸、Y軸、Z軸方向の位置情報とをそれぞれ地上に対する絶対位置として特定する請求項1又は2記載のクレーン吊荷の振れ角検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014020101A JP6280380B2 (ja) | 2014-02-05 | 2014-02-05 | クレーン吊荷の振れ角検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014020101A JP6280380B2 (ja) | 2014-02-05 | 2014-02-05 | クレーン吊荷の振れ角検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015147629A true JP2015147629A (ja) | 2015-08-20 |
| JP6280380B2 JP6280380B2 (ja) | 2018-02-14 |
Family
ID=53891362
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014020101A Active JP6280380B2 (ja) | 2014-02-05 | 2014-02-05 | クレーン吊荷の振れ角検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6280380B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107063074A (zh) * | 2017-04-14 | 2017-08-18 | 上海海事大学 | 一种基于磁致伸缩效应的双吊具桥吊摆角测量装置及其方法 |
| CN108217460A (zh) * | 2018-01-12 | 2018-06-29 | 湖南科技大学 | 一种起重机负载空间摆角实时检测系统及方法 |
| JP2020169087A (ja) * | 2019-04-04 | 2020-10-15 | 住友重機械搬送システム株式会社 | クレーンの吊具の位置合わせ方法、及びクレーンシステム |
| JP2021175684A (ja) * | 2020-05-01 | 2021-11-04 | 株式会社Ihi | 振れ角度検出装置 |
| CN115784015A (zh) * | 2022-11-03 | 2023-03-14 | 武汉理工大学 | 基于激光雷达门座式起重机偏摆角及速度测量方法及系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05238674A (ja) * | 1992-02-24 | 1993-09-17 | Sumitomo Heavy Ind Ltd | 吊り荷の振れ角検出器 |
| JPH08143273A (ja) * | 1994-11-22 | 1996-06-04 | Nkk Corp | クレーンの振れ角検出方法およびクレーン用振れ角センサ |
| JPH10258989A (ja) * | 1997-03-17 | 1998-09-29 | Nishimatsu Constr Co Ltd | クレーンの自動運転装置 |
| JP2001240372A (ja) * | 2000-03-03 | 2001-09-04 | Ohbayashi Corp | ケーブルクレーンの制御システム |
| JP2006044932A (ja) * | 2004-08-09 | 2006-02-16 | Hitachi Constr Mach Co Ltd | クレーンの姿勢演算装置、過負荷防止装置、および作業範囲制限装置 |
| JP2011102167A (ja) * | 2009-11-10 | 2011-05-26 | Ohbayashi Corp | クレーンの吊り荷位置監視システム及び吊り治具 |
-
2014
- 2014-02-05 JP JP2014020101A patent/JP6280380B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05238674A (ja) * | 1992-02-24 | 1993-09-17 | Sumitomo Heavy Ind Ltd | 吊り荷の振れ角検出器 |
| JPH08143273A (ja) * | 1994-11-22 | 1996-06-04 | Nkk Corp | クレーンの振れ角検出方法およびクレーン用振れ角センサ |
| JPH10258989A (ja) * | 1997-03-17 | 1998-09-29 | Nishimatsu Constr Co Ltd | クレーンの自動運転装置 |
| JP2001240372A (ja) * | 2000-03-03 | 2001-09-04 | Ohbayashi Corp | ケーブルクレーンの制御システム |
| JP2006044932A (ja) * | 2004-08-09 | 2006-02-16 | Hitachi Constr Mach Co Ltd | クレーンの姿勢演算装置、過負荷防止装置、および作業範囲制限装置 |
| JP2011102167A (ja) * | 2009-11-10 | 2011-05-26 | Ohbayashi Corp | クレーンの吊り荷位置監視システム及び吊り治具 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107063074A (zh) * | 2017-04-14 | 2017-08-18 | 上海海事大学 | 一种基于磁致伸缩效应的双吊具桥吊摆角测量装置及其方法 |
| CN108217460A (zh) * | 2018-01-12 | 2018-06-29 | 湖南科技大学 | 一种起重机负载空间摆角实时检测系统及方法 |
| JP2020169087A (ja) * | 2019-04-04 | 2020-10-15 | 住友重機械搬送システム株式会社 | クレーンの吊具の位置合わせ方法、及びクレーンシステム |
| JP7300300B2 (ja) | 2019-04-04 | 2023-06-29 | 住友重機械搬送システム株式会社 | クレーンの吊具の位置合わせ方法、及びクレーンシステム |
| JP2021175684A (ja) * | 2020-05-01 | 2021-11-04 | 株式会社Ihi | 振れ角度検出装置 |
| JP7445510B2 (ja) | 2020-05-01 | 2024-03-07 | 株式会社Ihi | 振れ角度検出装置 |
| CN115784015A (zh) * | 2022-11-03 | 2023-03-14 | 武汉理工大学 | 基于激光雷达门座式起重机偏摆角及速度测量方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6280380B2 (ja) | 2018-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112512951B (zh) | 用于运输摇摆吊装负载的系统和方法 | |
| CN102923572B (zh) | 一种吊车负载空间摆角检测技术及装置 | |
| US8627575B2 (en) | Hook pose detecting equipment and crane | |
| JP6280380B2 (ja) | クレーン吊荷の振れ角検出装置 | |
| JP5642409B2 (ja) | クレーンの制御装置及びクレーン | |
| CN113544078B (zh) | 起重机及其控制装置 | |
| US11919749B2 (en) | Crane, and method for controlling such a crane | |
| WO2014201886A1 (zh) | 吊重摆角、吊重载荷或吊重姿态的监测方法与装置及起重机 | |
| JP2011102167A (ja) | クレーンの吊り荷位置監視システム及び吊り治具 | |
| KR20120018118A (ko) | 작업 암의 위치 제어 장치를 구비한 이동식 작업 기계 및 이동식 작업 기계의 작업 암의 위치 제어 방법 | |
| US12606422B2 (en) | Lifting gear, and method for determining slack rope on the lifting gear | |
| CN112399959B (zh) | 起重机及起重机的控制方法 | |
| CN103241656A (zh) | 一种起重机遥控系统及其控制方法 | |
| WO2015113400A1 (zh) | 钢丝绳摇摆检测装置及起重机械 | |
| JP2021519249A (ja) | フックの振れ角をリアルタイムで表示する監視・検出装置およびクレーン | |
| JP2013018556A (ja) | クレーンの吊り荷の振れ角度検出装置 | |
| JP6454856B2 (ja) | 姿勢検出装置及び姿勢検出方法 | |
| JP5870395B2 (ja) | クレーンの吊り荷の振れ角度検出センサ | |
| JP3148168B2 (ja) | クラブ旋回型クレーン吊具の旋回振れ角測定装置 | |
| JP3850520B2 (ja) | クレ−ンの振れ角計測装置 | |
| JP6280395B2 (ja) | ロープトロリ式クレーンの振れ角度測定装置 | |
| US10870559B2 (en) | Apparatus and method for measuring rotational angle of sinking platform | |
| JP2010143724A (ja) | クレーン位置決め装置とその制御方法 | |
| JPH0771958A (ja) | クレーンの吊具振れ角検出装置の基準角度補正方法 | |
| JP2011126608A (ja) | クレーンブーム接触防止センサーおよびクレーンブーム接触防止センサーの取付構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171024 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180119 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6280380 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |