JP2015183733A - 動力伝達機構 - Google Patents
動力伝達機構 Download PDFInfo
- Publication number
- JP2015183733A JP2015183733A JP2014059142A JP2014059142A JP2015183733A JP 2015183733 A JP2015183733 A JP 2015183733A JP 2014059142 A JP2014059142 A JP 2014059142A JP 2014059142 A JP2014059142 A JP 2014059142A JP 2015183733 A JP2015183733 A JP 2015183733A
- Authority
- JP
- Japan
- Prior art keywords
- power transmission
- transmission mechanism
- coupling member
- movable
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Landscapes
- Mechanical Operated Clutches (AREA)
Abstract
【課題】二つの結合部材のがたつきを減らすことが可能な新規な構成の動力伝達機構を得る。
【解決手段】回転中心回りに回転可能に設けられ、凹部または凸部を含む第一の噛合部410が設けられた外周面を有した、第一の結合部材401と、回転中心回りに回転可能に設けられ、第一の結合部材401を回転中心の径方向の外側から覆い、凹部または凸部を含み第一の噛合部410と噛み合う第二の噛合部420が設けられた内周面を有した、第二の結合部材402と、移動可能に設けられた可動部440と、第一の噛合部410と第二の噛合部420とが噛み合った状態で、可動部440の動きにより、第一の結合部材401と第二の結合部材402との間の隙間Sを詰める詰部430と、を備える。
【選択図】図8
【解決手段】回転中心回りに回転可能に設けられ、凹部または凸部を含む第一の噛合部410が設けられた外周面を有した、第一の結合部材401と、回転中心回りに回転可能に設けられ、第一の結合部材401を回転中心の径方向の外側から覆い、凹部または凸部を含み第一の噛合部410と噛み合う第二の噛合部420が設けられた内周面を有した、第二の結合部材402と、移動可能に設けられた可動部440と、第一の噛合部410と第二の噛合部420とが噛み合った状態で、可動部440の動きにより、第一の結合部材401と第二の結合部材402との間の隙間Sを詰める詰部430と、を備える。
【選択図】図8
Description
本発明の実施形態は、動力伝達機構に関する。
従来、互いに噛み合う歯車形状を有した二つの結合部材がよりしっかりと結合されるよう、周方向に予荷重を与えるばねを備えた動力伝達機構が、知られている(例えば、特許文献1)。
この種の動力伝達機構では、例えば、より簡素に構成できたり、あるいはしっかりと結合された状態がより確実に得られたりするなど、二つの結合部材のがたつきを減らすことが可能な新規な構成が得られれば、有利な場合がある。本発明の実施形態の課題は、例えば、二つの結合部材のがたつきを減らすことが可能な新規な構成の動力伝達機構を得ることである。
実施形態の動力伝達機構は、例えば、回転中心回りに回転可能に設けられ、凹部または凸部を含む第一の噛合部が設けられた外周面を有した、第一の結合部材と、上記回転中心回りに回転可能に設けられ、上記第一の結合部材を上記回転中心の径方向の外側から覆い、凹部または凸部を含み上記第一の噛合部と噛み合う第二の噛合部が設けられた内周面を有した、第二の結合部材と、移動可能に設けられた可動部と、上記第一の噛合部と上記第二の噛合部とが噛み合った状態で、上記可動部の動きにより、上記第一の結合部材と上記第二の結合部材との間の隙間を詰める詰部と、を備える。よって、本実施形態によれば、例えば、詰部と可動部とを備えた新規な構成の動力伝達機構で、二つの結合部材のがたつきを減らす(無くす)ことができる。
また、上記動力伝達機構では、例えば、上記詰部は、上記第一の結合部材および上記第二の結合部材のうち少なくとも一方の一部である。よって、本実施形態によれば、例えば、詰部が比較的容易に設けられやすい。
また、上記動力伝達機構では、例えば、上記詰部は、上記第一の結合部材および上記第二の結合部材のうち少なくとも一方に支持される。よって、本実施形態によれば、例えば、詰部がより所望の形態に変形するよう構成されやすい場合がある。
また、上記動力伝達機構では、例えば、上記可動部は、上記回転中心の軸方向に沿って移動可能に設けられる。よって、本実施形態によれば、例えば、可動部は、軸方向に沿って移動することにより、他の部品との干渉を避けながら、詰部を押しやすい。
また、上記動力伝達機構では、例えば、上記詰部は、上記可動部の移動方向とは異なる方向に変形する。よって、本実施形態によれば、例えば、詰部が可動部に押された方向に変形する場合に比べて、詰部や、可動部、周辺部品等のレイアウトの自由度が増えやすい。
また、上記動力伝達機構では、例えば、上記可動部は、上記回転中心回りに回転可能に設けられた第一の部材と、上記回転中心回りに回転可能に設けられた第二の部材と、上記第一の部材と上記第二の部材との相対的な回転に伴って弾性的に伸縮する弾性部材と、を有したダンパ装置に対応して設けられ、上記第一の部材と上記第二の部材との相対的な回転を許容する第一の位置と、上記第一の部材と上記第二の部材との相対的な回転を抑制する第二の位置との間で移動可能に設けられる。よって、本実施形態によれば、例えば、動力伝達機構とダンパ装置とで可動部を別個に備えた構成に比べて、構成がより簡素化されやすかったり、小型化されやすかったりする。
また、上記動力伝達機構では、例えば、上記可動部は、上記回転中心回りに回転可能に設けられた第三の部材と、上記回転中心回りに回転可能に設けられるとともに上記回転中心の軸方向に移動可能に設けられた第四の部材と、を有して上記第三の部材と上記第四の部材との間で摩擦によってトルクが伝達されるとともに上記第四の部材の位置によって伝達されるトルクの大きさが変化する第一の回転伝達部と、を備えたクラッチ装置の、上記第四の部材を、上記軸方向に動かす。よって、本実施形態によれば、例えば、動力伝達機構とクラッチ装置とで可動部を別個に備えた構成に比べて、構成がより簡素化されやすかったり、小型化されやすかったりする。
また、上記動力伝達機構では、例えば、上記可動部は、摩擦によって伝達されるトルクが大きくなるように上記第四の部材を動かす方向とは逆の方向に動くことにより、上記詰部を上記第一の結合部材と上記第二の結合部材との間の隙間を詰める状態にする。よって、本実施形態によれば、例えば、クラッチ装置の動作に支障を来すことなく、隙間を詰めることができる。
また、上記動力伝達機構では、例えば、上記クラッチ装置は、上記回転中心回りに回転可能に設けられた第五の部材と、上記第三の部材と上記第五の部材との間で摩擦によってトルクが伝達されるとともに上記第五の部材の位置によって伝達されるトルクの大きさが変化する第二の回転伝達部と、を備える。よって、本実施形態によれば、例えば、動力伝達機構とクラッチ装置とで可動部が両立する構成が得られやすい。
また、上記動力伝達機構では、例えば、上記可動部は、所定距離動くことにより、上記詰部を上記第一の結合部材と上記第二の結合部材との間の隙間を詰める状態にする。よって、本実施形態によれば、例えば、可動部の移動量によって、詰部が所定の状態になったか否かが確認されやすい。
また、上記動力伝達機構は、例えば、さらに、上記可動部の移動量に対応して変化するパラメータを検出する検出部を備える。よって、本実施形態によれば、例えば、センサによって、可動部の移動によって実行された処理や、可動部の動作の状態等が、検出されやすい。
また、上記動力伝達機構は、例えば、上記動力伝達機構は、車両用のエンジンとトランスミッションとの間でトルクを伝達し、上記可動部は、上記エンジンと上記トランスミッションとが一体化された後上記エンジンが回転するまでの間、または上記エンジンおよび上記トランスミッションが車両に組み付けられた後上記エンジンが回転するまでの間に動くことにより、上記詰部を上記第一の結合部材と上記第二の結合部材との間の隙間を詰める状態にする。よって、本実施形態によれば、例えば、エンジンおよびトランスミッションの使用開始前の可動部の動作によって、隙間が詰められた状態が得られる。よって、ユーザは、隙間が詰まっていないことによる不都合な事象を、体感せずに済む。
以下、本発明の例示的な実施形態が開示される。以下に示される実施形態の構成、ならびに当該構成によってもたらされる作用および結果(効果)は、あくまで一例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能である。また、本発明によれば、構成によって得られる種々の効果(派生的な効果も含む)のうち少なくとも一つを得ることが可能である。
また、以下に開示される複数の実施形態には、同様の構成要素が含まれる。以下では、同様の構成要素には共通の符号が付与されるとともに、重複する説明が省略される。また、以下の説明では、特に言及しない限り、軸方向は回転中心Ax(回転軸)の軸方向、径方向は回転中心Axの径方向、周方向は回転中心Axの周方向である。
<第1実施形態>
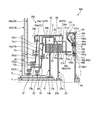
本実施形態のダンパ装置100およびクラッチ装置200(図1参照)は、例えば、エンジン(動力装置、図示されず)とトランスミッション(変速装置、図示されず)との間に位置される。ダンパ装置100は、フライホイールダンパの一例である。また、ダンパ装置100は、エンジンとクラッチ装置200との間に位置され、クラッチ装置200は、ダンパ装置100とトランスミッションとの間に位置される。なお、ダンパ装置100は、エンジンとトランスミッションとの間には限られず、他の位置にも設けられうるし、種々の車両(例えば、ハイブリッド自動車)や、回転要素を有した機械等にも設けられうる。また、ダンパ装置100は、クラッチ装置200との組み合わせにも限定されない。
本実施形態のダンパ装置100およびクラッチ装置200(図1参照)は、例えば、エンジン(動力装置、図示されず)とトランスミッション(変速装置、図示されず)との間に位置される。ダンパ装置100は、フライホイールダンパの一例である。また、ダンパ装置100は、エンジンとクラッチ装置200との間に位置され、クラッチ装置200は、ダンパ装置100とトランスミッションとの間に位置される。なお、ダンパ装置100は、エンジンとトランスミッションとの間には限られず、他の位置にも設けられうるし、種々の車両(例えば、ハイブリッド自動車)や、回転要素を有した機械等にも設けられうる。また、ダンパ装置100は、クラッチ装置200との組み合わせにも限定されない。
ダンパ装置100は、回転中心Ax回りに回転する。ダンパ装置100は、全体としては、回転中心Axの軸方向に薄い扁平な円盤状に構成されている。
ダンパ装置100は、部材101や、部材102、弾性部材103、摩擦部材104、弾性部材105、可動部440等を備えている。部材101および部材102のうち一方(例えば、部材101)が入力側(エンジン側)に接続され、他方(例えば、部材102)が出力側(トランスミッション側)に接続される。ダンパ装置100では、部材101と部材102との間に設けられる弾性部材103が、部材101と部材102との相対的な回転に伴って弾性的に伸縮することにより、トルク変動が緩和される。部材101は、第一の部材の一例であり、部材102は第二の部材の一例である。弾性部材103は、第一の弾性部材の一例である。
部材101(ドライブプレート、サイドプレート)は、壁部111,112,113を有する。壁部111(プレート)は、回転中心Axと交叉する(例えば、略直交する)円板状に構成されている。壁部113(プレート)は、回転中心Axと交叉する(例えば、略直交する)円環状かつ板状に構成されている。壁部113は、壁部111の軸方向の一方側(図1では左側)に位置されている。壁部113は、壁部111の径方向の外側の端部(外周部)に対して間隔をあけて軸方向に面している。壁部112(プレート)は、回転中心Axを中心とする円筒状に構成されている。壁部112は、壁部111の径方向の外側の端部と、壁部113の径方向の外側の端部との間に亘っている。なお、壁部112は、径方向の外側に凸に曲がっていてもよい。また、壁部112は、壁部111,113の少なくとも一方の一部として構成される。その場合、壁部112は、例えば当該一方が屈曲された部分として構成される。部材101(壁部111,112,113)は、例えば、金属材料で構成される。部材101は、エンジンのシャフト1と一体的に回転する。
部材101の径方向の外側の端部には、壁部111,112,113によって、室107が構成されている。室107は、軸方向かつ径方向に所定の幅を有し周方向に沿って円弧状に延びている。室107には、弾性部材103が収容されている。弾性部材103は、例えば、周方向に沿って円弧状に延びて当該周方向に沿って伸縮する。弾性部材103は、例えばコイルスプリングである。なお、複数の室107が周方向に分けて設けられてもよい。その場合、複数の室107のそれぞれに、弾性部材103が収容される。また、室107の径方向の内側の端部には、当該径方向の内側に向けて開放された開口部107aが設けられている。室107内には、潤滑剤(例えば、グリス)が収容されている。潤滑剤により、室107内に位置される部品(例えば弾性部材103等)が移動や変形する際の抵抗の増大が抑制されるとともに、当該部品の摩耗が抑制される。
部材102(ドリブンプレート、センタープレート)は、壁部121を有する。壁部121は、部材101の壁部111の軸方向の一方側(図1では左側)に位置されている。壁部121は、回転中心Axと交叉する(例えば、略直交する)円環状かつ板状に構成されている。部材102は、少なくとも所定の角度範囲内では、部材101に対して相対的に回転可能に設けられている。壁部121(部材102)には、スプライン結合部102cが設けられている。スプライン結合部102cは、接続部21の第一部分21aに支持されている。部材102は、接続部21と一体的に回転する。部材102は、例えば、金属材料で構成される。
部材101は、弾性部材103の周方向の一方側の端部を支持する部分101aを有している。一方、部材102は、弾性部材103の周方向の他方側の端部を支持する部分102aを有している。弾性部材103は、部分101aと部分102aとの間に位置されている。弾性部材103は、例えば、金属材料で構成され、周方向または径方向との交叉方向に略沿って伸縮するコイルスプリングである。部材101と部材102との相対的な回転によって弾性部材103の周方向の両側に位置される部分101aと部分102aとが互いに近付くと、弾性部材103が弾性的に縮み、部材101と部材102との相対的な回転によって部分101aと部分102aとが互いに遠ざかると、弾性部材103が弾性的に伸びる。弾性部材103は、弾性的に縮むことにより部材101と部材102との間のトルク差を弾性力として一時的に蓄え、蓄えた弾性力を弾性的に伸びることにより部材101および部材102にトルクとして放出する。このようにして、ダンパ装置100は、弾性部材103によってトルク変動を緩和することができる。
摩擦部材104は、部材101と部材102との間に介在している。本実施形態では、摩擦部材104は、壁部111と壁部121との間に軸方向に挟まれている。摩擦部材104は、回転中心Axと交叉する(例えば、略直交する)円環状かつ板状に構成されている。摩擦部材104は、例えば、合成樹脂材料で構成されている。摩擦部材104は、部材101,102のうち少なくとも一方と摺動する。本実施形態では、摩擦部材104は、部材102に支持されて部材102と一体的に回転する。具体的には、摩擦部材104の突出部104aが、部材102に設けられた開口部102bに収容されている。突出部104aと開口部102b(の縁部、内面)とが互いに引っ掛かることにより、摩擦部材104と部材102とが一体的に回転する。部材101と部材102とが相対的に回転する場合に、摩擦部材104は、当該摩擦部材104と摺れる部材(本実施形態では、例えば、部材101)に摩擦トルク(摩擦抵抗、摺動抵抗)を与える。
摩擦部材104による摩擦トルク(抵抗トルク)は、摩擦部材104と当該摩擦部材104と摺れる部材(本実施形態では、例えば、部材101)との摩擦面Sに作用する摩擦面と垂直方向(軸方向)の力の大きさに応じて定まる。
また、摩擦部材104は、室107の開口部107a内あるいは開口部107aに隣接して設けられ、開口部107aを覆っている。摩擦部材104によって、室107に収容された潤滑剤が開口部107aから出るのが抑制される。また、摩擦面Sは、開口部107aとは離れて設定されている。よって、潤滑剤によって摩擦面Sでの摩擦トルクが低下するのが抑制されている。
弾性部材105は、摩擦部材104と、当該摩擦部材104と摺れる部材(本実施形態では、例えば、部材101)とが摩擦面Sで互いに押す力を与える。本実施形態では、弾性部材105は、壁部121と壁部113との間に位置され、壁部121および壁部113に、それらが互いに離れる方向に弾性力を与える。弾性部材105は、例えば、金属材料で構成された円環状(円筒状)の板バネ(皿バネ、コーンスプリング)である。本実施形態では、弾性部材103の弾性力によるトルク変動の緩和が行われている通常の使用状態で、弾性部材105が与える力による比較的小さい摩擦トルクが生じる。この摩擦トルクにより、弾性部材103によるトルクの蓄積および放出が急激に行われるのが抑制される。
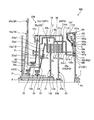
クラッチ装置200は、二つの回転伝達部10,20を備えた所謂ツインクラッチである。クラッチ装置200では、図示されないアクチュエータによって、可動部(部材14,24,15,25,16,26や、ベアリング31,32等)が軸方向に沿って動かされることにより、回転伝達部10および回転伝達部20のうち一方で選択的に回転(トルク)が伝達される状態と、回転伝達部10および回転伝達部20の双方での回転の伝達が遮断された状態と、を切り替えることができる。回転伝達部10は、部材2とシャフト3との間の回転の伝達状態を変化させることができる。回転伝達部20は、部材2とシャフト4との間の回転の伝達状態を変化させることができる。部材2は、トルクの入力部材および出力部材のうち一方である。シャフト3,4は他方である。なお、回転伝達部10,20は、それぞれ、入力トルクに対して出力トルクが減る所謂半クラッチ状態での回転の伝達も可能である。回転伝達部10は、第二の回転伝達部の一例であり、回転伝達部20は、第一の回転伝達部の一例である。
クラッチ装置200は、回転伝達部10による回転の伝達および遮断に関わる部品としては、部材2,13〜16、シャフト3、ならびにベアリング31を備える。部材2,13〜16ならびにシャフト3は、いずれも金属材料等で構成されうる。
シャフト3,4は、ケース5(例えばトランスミッションケース)に、軸受部(図示されず)を介して回転可能に支持されている。シャフト3,4は、それらの中心軸である回転中心Ax回りに回転する。すなわち、シャフト3,4は同心の多重の(本実施形態では、例えば二重の)回転体である。シャフト3,4のうち一方は少なくとも部分的に筒状に構成される。他方は一方の筒状部内に位置される。
ケース5には、突出部51が設けられている(固定されている、結合されている)。突出部51は、シャフト3,4を径方向の外側(外周側)から覆う。突出部51は、壁部52から軸方向の他方側(図1では右側)に向けて筒状(円筒状)に突出している。突出部51は、ケース5の他の部分(例えば、壁部52)と一体成形されるし、あるいは、他の部分とは別部材として構成され当該他の部分に結合具(ねじ、リベット等、図示されず)等を用いて一体化される。
部材2(例えば、クラッチカバー)は、回転中心Ax回りに回転可能に設けられる。部材2は、壁部2a,2b,2cを有する。壁部2aは、円環状かつ板状に構成され、回転中心Axと交叉して(略直交して)広がっている。壁部2bは、壁部2aから軸方向の一方側(図1の左側)に向けて突出し、円筒状に構成されている。壁部2cは、壁部2bに接続(結合、固定)されている。壁部2cは、円板状に構成され、回転中心Axと交叉して広がっている。また、ベアリング33(軸受部)の一方の回転部分(例えば、径方向の内側の回転部分)は、突出部51と接続(結合、固定)され、他方の回転部分(例えば、径方向の外側の回転部分)は、壁部2c(部材2)の径方向の内側の端部と接続(結合、固定)されている。壁部2c(部材2)は、ベアリング33によって、回転中心Ax回りに回転可能に支持されている。なお、部材2は、軸方向には移動しない。
壁部2aには、接続部21(接続部材、結合部材)が結合されている。接続部21は、第一部分21a、第二部分21b、および第三部分21cを有する。第一部分21aは、円筒状に構成されている。第一部分21aは、ダンパ装置100の部材102(壁部121のスプライン結合部102c)を軸方向に移動可能に支持している。第一部分21aは部材102と一体的に回転する。すなわち、ダンパ装置100から出力されたトルクは、接続部21を介して、部材2に入力される。第二部分21bおよび第三部分21cを含む複数のL字状部分が、第一部分21aから突出している。複数のL字状部分が、周方向に間隔をあけて設けられている。なお、図1には、一つのL字状部分(第二部分21bおよび第三部分21c)のみが示されている。第二部分21bは、板状あるいは棒状に構成され、第一部分21aから径方向の外側に向けて突出している。第三部分21cは、板状あるいは棒状に構成され、第二部分21bから軸方向の一方側に向けて軸方向に沿って突出している。そして、第三部分21cの軸方向の一方側の端部が、壁部2aに結合(固定)されている。第三部分21cは、部材24の壁部24aに設けられた開口部24dを貫通している。壁部24aには、複数の第三部分21cのそれぞれに対応して、複数の開口部24dが設けられている。接続部21は、例えば、金属材料で構成される。
部材13(例えば、第一のクラッチディスク)は、壁部2aの軸方向の一方側(図1では左側)に設けられている。部材13は、壁部13aならびにスプライン結合部13bを有する。壁部13aは、円板状に構成され、回転中心Axと交叉して(略直交して)広がっている。部材13は、シャフト3と一体的に回転する。また、部材13は、軸方向に移動可能に設けられている。具体的には、壁部13aは、シャフト3に、円筒状のスプライン結合部13bを介して支持されている。また、壁部13aは、壁部2a,14aの間に位置されて壁部2a,14aによって挟まれる領域を有している。壁部13aの軸方向の両側には、摩擦材13c(摩擦部材)が設けられている。
部材14(例えば、第一のプレッシャプレート)は、壁部14aを有する。壁部14aは、円環状かつ板状に構成され、回転中心Axと交叉して(略直交して)広がっている。部材14は、軸方向に移動可能に部材2に支持される。また、部材14は、部材2と一体的に回転するよう構成されている。
図1,2に例示されるように、部材14は、位置P1(図2)と位置P2(図1)との間で軸方向に移動することができる。壁部13aは、位置P1では、壁部2aと壁部14aとの間に摩擦材13cを介して挟まれる。この状態では、壁部2aと壁部13aとの間で回転が伝達される(伝達状態)。壁部13aは、位置P2では、位置P1よりも壁部2aおよび壁部14aの双方から離間する。この状態では、壁部2aと壁部14aとの間の回転の伝達が遮断される(遮断状態)。摩擦材13cは、壁部2aと壁部13aとの間、ならびに壁部13aと壁部14aとの間のそれぞれに、介在する。壁部14aの位置によっては、摩擦材13cと壁部2a,14aとの間ですべりが生じる状態(所謂半クラッチ状態)にもなる。なお、摩擦材は、壁部2a,14aにも設けられうる。部材2は、第三の部材の一例であり、部材13は、第五の部材の一例である。
部材15(例えば、第一のレリーズプレート)は、壁部15a、貫通部15b、接続部15cを有する。壁部15aは、例えば、ダイヤフラムスプリング(弾性部材)であり、円環状(円錐状)のばね部15a1(コーンスプリング)と、ばね部15a1から周方向に沿って略等角度間隔で径方向の内側に向けて片持ち状(例えば三角形状)に伸びた複数のレバー部15a2とを有する。貫通部15bは、板状あるいは棒状に構成され、軸方向に沿って延びている。接続部15cは円筒状に構成されている。接続部15cからは、周方向に沿って略等角度間隔で並べられた複数の貫通部15bが、軸方向の他方側(図1の右側)に向けて突出している。貫通部15bは、壁部2cに設けられた開口部2dを貫通している。貫通部15bの軸方向の他方側の端部に、壁部15aが接続(支持、接触)されている。
部材15は、ベアリング31(軸受部)を介して、回転中心Ax回りに回転可能に、突出部51に支持されている。ベアリング31の一方の回転部分(例えば、径方向の内側の回転部分)は、突出部51に対して相対的に回転しないよう構成されるとともに、軸方向に移動可能に突出部51に支持されている。一方、ベアリング31の他方の回転部分(例えば、径方向の外側の回転部分)は、接続部15cと接続(支持)されている。すなわち、部材15は、ベアリング31を介して、突出部51に、軸方向に移動可能に支持されるとともに、回転中心Ax回りに回転可能に支持されている。また、部材15は、部材2,15間の周方向の引っ掛かりや、摩擦等によって、部材2と一体的に回転する。
部材16(例えば、第一のレバー、第一のフォーク)は、ケース5に対して軸方向に移動可能に設けられている。部材16は、延部16a(アーム部、レバー部、壁部)を有する。延部16aは、径方向に沿って延びており、板状あるいは棒状に構成されている。延部16aは、ベアリング31の突出部51に支持される側の回転部分(例えば、径方向の内側の回転部分)と接続(結合、固定)されている。よって、アクチュエータ(図示されず)が部材16を軸方向に動かし、これにより、部材15ひいては部材14が軸方向に動いて、回転伝達部10の伝達状態、半クラッチ状態、遮断状態が切り替わる。
一方、クラッチ装置200は、回転伝達部20による回転の伝達および遮断に関わる部品としては、部材2,23〜26、シャフト4、ならびにベアリング32を備える。部材23〜26ならびにシャフト4は、いずれも金属材料等で構成されうる。
部材23(例えば、第二のクラッチディスク)は、壁部2aの軸方向の他方側(図1では右側)に設けられている。部材23は、壁部23aならびにスプライン結合部23bを有する。壁部23aは、円板状に構成され、回転中心Axと交叉して(略直交して)広がっている。部材23は、シャフト3と一体的に回転する。また、部材23は、軸方向に移動可能に設けられている。具体的には、壁部23aは、シャフト3に、円筒状のスプライン結合部23bを介して支持されている。また、壁部23aは、壁部2a,24aの間に位置されて壁部2a,24aによって挟まれる領域を有している。壁部23aの軸方向の両側には、摩擦材23cが設けられている。
部材24(例えば、第二のプレッシャプレート)は、壁部24a,24b,24cおよび突出部24eを有する。壁部24aは、円環状かつ板状に構成され、回転中心Axと交叉して(略直交して)広がっている。壁部24aには、周方向に沿って間隔をあけて複数の開口部24dが設けられている。壁部24bは、円筒状に構成されている。壁部24cは、円環状に構成され、壁部24bに接続(結合、固定)されている。突出部24eは、板状あるいは棒状に構成されている。壁部24aからは、周方向に沿って間隔をあけて配置された複数の突出部24eが、軸方向に沿って軸方向の他方側(図1では右側)に向けて櫛歯状に突出している。突出部24eと接続部21の第二部分21bとは、周方向に互い違いに(交互に)配置されている。部材24は、軸方向に移動可能に部材2に支持される。また、部材24は、部材2と一体的に回転するよう構成されている。
図3,4に例示されるように、部材24は、位置P3(図3)と位置P4(図4)との間で軸方向に移動することができる。壁部23aは、位置P3では、壁部2aと壁部24aとの間に摩擦材23cを介して挟まれる。この状態では、壁部2aと壁部23aとの間で回転が伝達される(伝達状態)。壁部23aは、位置P4では、位置P3よりも壁部2aおよび壁部24aの双方から離間する。この状態では、壁部2aと壁部24aとの間の回転の伝達が遮断される(遮断状態)。摩擦材23cは、壁部2aと壁部23aとの間、ならびに壁部23aと壁部24aとの間のそれぞれに、介在する。壁部24aの位置によっては、摩擦材23cと壁部2a,24aとの間ですべりが生じる状態(所謂半クラッチ状態)にもなる。なお、摩擦材は、壁部2a,24aにも設けられうる。部材2は、第三の部材の一例であり、部材23は、第四の部材の一例である。
部材25は(例えば、第二のレリーズプレート)は、壁部25aを有する。壁部25aは、部材2の壁部2cの壁部15aとは反対側に位置している。壁部25aは、例えば、ダイヤフラムスプリング(弾性部材)であり、円環状(円錐状)のばね部25a1(コーンスプリング)と、ばね部25a1から周方向に沿って略等角度間隔で径方向の内側に向けて片持ち状(例えば三角形状)に伸びた複数のレバー部25a2とを有する。ベアリング32(軸受部)は、壁部25aの径方向の内側の端部と接続(支持)されている。
部材25は、ベアリング32を介して、回転中心Ax回りに回転可能に、部材15の接続部15cに支持されている。ベアリング32の一方の回転部分(例えば、径方向の内側の回転部分)は、部材15に対して相対的に回転しないよう構成されるとともに、軸方向に移動可能に部材15に支持されている。一方、ベアリング32の他方の回転部分(例えば、径方向の外側の回転部分)は、壁部25aと接続(結合)されている。部材25は、部材2,25間の周方向の引っ掛かりや、摩擦等によって、部材2と一体的に回転する。すなわち、部材25は、ベアリング32を介して、部材15に、軸方向に移動可能に支持されるとともに、回転可能に支持されている。
部材26(例えば、第二のレバー、第二のフォーク)は、ケース5に対して軸方向に移動可能に設けられている。部材26は、延部26a(アーム部、レバー部、壁部)を有する。延部26aは、径方向に沿って延びており、板状かつ帯状あるいは棒状に構成されている。延部26aは、ベアリング32の部材25に支持される側の回転部分(例えば、径方向の内側の回転部分)と接続(結合、固定)されている。よって、アクチュエータ(図示されず)が部材26を軸方向に動かし、これにより、部材25ひいては部材24が軸方向に動いて、回転伝達部20の伝達状態、半クラッチ状態、遮断状態が切り替わる。なお、部材26は、部材25に替えて突出部51に、ベアリング(図示されず)を介して支持されうる。
動力伝達機構400は、スプラインやセレーションによって結合される二つの結合部材401,402間で、動力(回転、トルク)が伝達される。動力伝達機構400は、結合部材401(図5参照)と、結合部材402(図6参照)と、を備える。結合部材401は、例えば、円柱状あるいは円筒状に構成され、結合部材402は、例えば、円筒状に構成されている。結合部材401は、接続部21であり、結合部材402は、部材102である。結合部材401は、第一の結合部材の一例であり、結合部材402は、第二の結合部材の一例である。
図5に例示されるように、結合部材401は、外周面401aと、噛合部410と、を有する。外周面401aは、円柱面状(円筒の外面状)に構成されている。噛合部410は、外周面401aに設けられている。噛合部410には、凹部および凸部のうち少なくとも一方(本実施形態では、例えば凸部411)が含まれる。凸部411は、軸方向に沿って伸びた線状の隆起(壁、リブ)として構成されている。凸部411は、互いに平行な二つの面411a(側面)と、二つの面411a間に亘る面411b(頂面)と、を有している。面411bは、円筒面の一部(曲面)、あるいは平面として構成されている。また、複数の同一形状の凸部411が、周方向に略一定の間隔で配置されている。図5の例では、12個の凸部411が、周方向に30°おきに設けられている。また、互いに隣接した二つの凸部411の間には、凹部412が設けられている。噛合部410は、第一の噛合部の一例である。
図6に例示されるように、結合部材402は、内周面402aと、噛合部420と、を有する。内周面402aは、円筒面状(円筒の内面状)に構成されている。内周面402aの直径は、外周面401aの直径より僅かに大きい。噛合部420は、内周面402aに設けられている。噛合部420には、凹部および凸部のうち少なくとも一方(本実施形態では、例えば凹部421)が含まれる。凹部421は、軸方向に沿って延びた線状のみ溝として構成されている。凹部421は、互いに並行な二つの面421a(側面)と、二つの面421a間に亘る面421b(底面)と、によって形成されている。また、複数の同一形状の凹部421が、周方向に略一定の間隔で配置されている。図6の例では、12個の凹部421が、周方向に30°おきに設けられている。また、互いに隣接した二つの凹部421の間には、凸部422が設けられている。噛合部420は、第二の噛合部の一例である。
結合部材401の噛合部410と、結合部材402の噛合部420とは、径方向ならびに周方向に略位置決めされた状態で結合部材401と結合部材402とを軸方向に互いに近接させることにより、互いに噛み合うことができる。噛合部410と噛合部420との間には、組み付け易くなるよう、微少な隙間S(図7,8参照)が設けられている。噛合部410と噛合部420とが噛み合った状態では、結合部材401の凸部411が結合部材402の凹部421に収容され、結合部材402の凸部422が結合部材401の凹部412に収容される。
ところが、この隙間Sは、動力伝達機構400が回転する場合に、例えば、音や振動等の一因となる虞がある。そこで、本実施形態では、図7,8等に例示されるように、動力伝達機構400は、さらに、詰部430と、可動部440とを備えている。噛合部410と噛合部420とが噛み合った状態で可動部440に押されて詰部430が変形すると、結合部材401と結合部材402とのがたつきが減らされた状態(がたつきが無い状態)が得られる。すなわち、可動部440は、詰部430を押して変形させ、詰部430が隙間Sを詰める。これにより、結合部材401と結合部材402とのがたつきが減る(がたつきが無くなる)。詰部430の変形は、例えば塑性変形であるが、弾性変形であってもよい。また、変形後の詰部430には、塑性変形領域と弾性変形領域とが含まれてもよい。詰部430は当初の位置(初期位置)から変形することにより、結合部材401と結合部材402とは、がたついている状態から、がたつきが減らされた(無い)状態へ移行する。詰部430の変形を伴うため、結合部材401と結合部材402とは周方向によりしっかりと固定される。また、詰部430を可動部440を用いて変形させることにより、工具等で直接押して変形させる場合に比べて、詰部430を変形させる手間が減る場合がある。詰部430は、例えば、圧入部や、圧着部、張出部とも称されうる。
詰部430は、結合部材401および結合部材402のうち少なくとも一方の一部に設けることができる。本実施形態では、例えば、結合部材402の一部が、詰部430として機能する。具体的には、図7,8に示されるように、結合部材402に、軸方向に伸びた凹部402bが設けられ、可動部440に、軸方向に突出した凸部440aが設けられている。また、複数の凹部402bが、周方向に沿って間隔をあけて設けられており、各凹部402bに対応して、凸部440aが設けられている。凸部440aは、可動部440から、軸方向の他方側(図8では右側、結合部材402側)に向けて突出している。凸部440aの直径は、凹部402bの直径より大きい。図7に示されるように、凸部440aの先端部は、テーパ状(円錐面状)に形成されている。
そして、本実施形態では、図8に示されるように、アクチュエータ(図示されず)によって押された可動部440の凸部440aが、周方向に略位置合わせされた状態で、凹部402bに挿入される。可動部440は、さらにアクチュエータに押され、図7,8に示されるように、凹部402bを押し広げる。これにより、凹部402bの周縁部402cが変形し、凹部402bから離れる方向に広がって、凹部421と凸部411との間の隙間Sが埋まり、結合部材401と結合部材402とが密着する。これにより、結合部材401と結合部材402とのがたつきが減らされる(無くなる)。周縁部402cは、詰部430の一例である。
以上のように、本実施形態によれば、例えば、可動部440が詰部430を変形させ、結合部材401と結合部材402とのがたつきを減らす(無くす)ことができる。すなわち、本実施形態によれば、詰部430と可動部440とを備えた新規な構成の動力伝達機構400で、結合部材401と結合部材402とのがたつきを減らす(無くす)ことができる。よって、例えば、可動部440を用いて詰部430をより容易にあるいはより確実に変形させることができる。
また、本実施形態では、例えば、詰部430(周縁部402c)は、結合部材402(第二の結合部材)の一部である。よって、詰部430が比較的容易に設けられやすい。
また、本実施形態では、例えば、可動部440は、軸方向に沿って移動可能に設けられている。結合部材401,402ならびに詰部430の周囲には何らかの部品が配置されることが多い。この点、本実施形態によれば、例えば、可動部440は、軸方向に沿って移動することにより、他の部品との干渉を避けながら、詰部430を押しやすい。
また、本実施形態では、例えば、詰部430は、可動部440の移動方向(本実施形態では、軸方向)とは異なる方向(本実施形態では、軸方向とは交叉する方向、凹部402bから離れる方向)に変形する。よって、本実施形態によれば、例えば、詰部430が可動部440に押された方向に変形する場合に比べて、詰部430や、可動部440、周辺部品等のレイアウトの自由度が増えやすい。
また、本実施形態では、例えば、可動部440は、クラッチ装置200の部材24の一部でもある。すなわち、可動部440と部材24とは、動力伝達機構400とクラッチ装置200とで共用されている。よって、本実施形態によれば、例えば、可動部440と部材24とを別個に備えた構成に比べて、構成がより簡素化されやすかったり、小型化されやすかったりする。
また、本実施形態では、例えば、回転伝達部20で摩擦により伝達されるトルクが大きくなる部材24の移動方向(軸方向の一方側、図1の左側)とは逆の方向(軸方向の他方側、図1の右側)に部材24(可動部440)が動くことにより、詰部430によって隙間Sが詰められた状態が得られる。よって、本実施形態によれば、例えば、可動部440と部材24とが動力伝達機構400とクラッチ装置200とで共用された構成であっても、クラッチ装置200の動作に支障を来すことなく、隙間Sを詰めることができる。
また、本実施形態では、例えば、クラッチ装置200は、二つの回転伝達部10,20を備えた所謂ツインクラッチである。よって、本実施形態によれば、例えば、部材24の移動方向と、可動部440の移動方向とが両立する構成が得られやすい。
また、本実施形態では、例えば、可動部440の移動に基づく詰部430による隙間Sの詰めは、エンジンとトランスミッションとが一体化(アセンブリ)された後エンジンが回転するまでの間、またはエンジンおよびトランスミッションとが車両に組み付けられた後エンジンが回転するまでの間に実行される。よって、本実施形態によれば、例えば、エンジンおよびトランスミッションの使用開始前の可動部440の動作によって、隙間Sが詰められた状態が得られる。よって、ユーザは、隙間Sが詰まっていないことによる不都合な事象を、体感せずに済む。
<第1変形例>
第1実施形態の変形例の一つとしての図9に例示される動力伝達機構400Aは、上記動力伝達機構400と同様の構成を備える。よって、本変形例の動力伝達機構400Aによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図9に例示される動力伝達機構400Aは、上記動力伝達機構400と同様の構成を備える。よって、本変形例の動力伝達機構400Aによれば、同様の構成に基づく同様の作用や効果が得られる。
ただし、本変形例では、結合部材401(第一の結合部材)に詰部430Aが設けられている。具体的には、結合部材401の噛合部410の凸部411の幅W1は、対応する結合部材402(第二の結合部材)の噛合部420の凹部421の幅W2より僅かに広く設定されている。そして、可動部440が、凸部411の中央部に位置された押点Pを軸方向(図9の紙面と垂直な方向)に押し、これにより、凸部411が、例えば、紙面の裏側方向に凸となる形状に変形しながら、凹部421内に食い込む(押し込まれる、圧入される)。このような構成ならびに手順によっても、結合部材401と結合部材402とのがたつきが減る(無くなる)。この例では、凸部411の周縁部が、詰部430Aである。
<第2変形例>
第1実施形態の変形例の一つとしての図10に例示される動力伝達機構400Bは、上記動力伝達機構400,400Aと同様の構成を備える。よって、本変形例の動力伝達機構400Bによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図10に例示される動力伝達機構400Bは、上記動力伝達機構400,400Aと同様の構成を備える。よって、本変形例の動力伝達機構400Bによれば、同様の構成に基づく同様の作用や効果が得られる。
ただし、本変形例では、結合部材401(第一の結合部材)の第1変形例とは異なる部位に、詰部430Bが設けられている。具体的には、結合部材401の噛合部410の先端部分の凸部411の幅W1は、対応する結合部材402(第二の結合部材)の噛合部420の凹部421の幅W2より僅かに広く設定されている。そして、可動部440が、凸部411の中央部に位置された押点Pを軸方向(図10の紙面と垂直な方向)に押し、これにより、凸部411の先端部分が、例えば、紙面の裏側方向に凸となる形状に変形しながら、凹部421内に食い込む(押し込まれる、圧入される)。このような構成ならびに手順によっても、結合部材401と結合部材402とのがたつきが減る(無くなる)。この例では、凸部411の先端部分の周縁部が、詰部430Bである。
<第3変形例>
第1実施形態の変形例の一つとしての図11に例示される動力伝達機構400Cは、上記動力伝達機構400,400A,400Bと同様の構成を備える。よって、本変形例の動力伝達機構400Cによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図11に例示される動力伝達機構400Cは、上記動力伝達機構400,400A,400Bと同様の構成を備える。よって、本変形例の動力伝達機構400Cによれば、同様の構成に基づく同様の作用や効果が得られる。
ただし、本変形例では、結合部材401(第一の結合部材)の第1変形例および第2変形例とは異なる部位に、詰部430Cが設けられている。具体的には、図11で左側の凸部411は、対応する凹部421に対して周方向の一方側(図11の左側)に僅かにずれた位置に設けられるとともに、図11で右側の凹部411は、対応する凹部421に対して周方向の他方側(図11の右側)に僅かにずれた位置に設けられる。そして、可動部440が、各凸部411の中央部に位置された押点Pを軸方向(図11の紙面と垂直な方向)に押し、これにより、各凸部411が、例えば、紙面の裏側方向に凸となる形状に変形しながら、対応する凹部421内に食い込む(押し込まれる、圧入される)。このような構成ならびに手順によっても、結合部材401と結合部材402とのがたつきが減る(無くなる)。この例では、各凸部411の対応する凹部421との接触部分ならびにその近傍となる部位が、詰部430Cである。
<第4変形例>
第1実施形態の変形例の一つとしての図12,13に例示される動力伝達機構400Dは、上記動力伝達機構400,400A〜400Cと同様の構成を備える。よって、本変形例の動力伝達機構400Dによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図12,13に例示される動力伝達機構400Dは、上記動力伝達機構400,400A〜400Cと同様の構成を備える。よって、本変形例の動力伝達機構400Dによれば、同様の構成に基づく同様の作用や効果が得られる。
ただし、本変形例では、押点Pで押された凸部411が可動部440に押されて捩れる状態に変形しながら、凹部421内に食い込む(押し込まれる、圧入される)。凸部411は、変形する前に捩られた形状(図13で左側の部分が右側の部分よりも上に位置された傾斜状態)に構成されており、押点Pは、凸部411の中央部よりも捩れを解消する側(図12,13での左側)にずれた位置に設定される。このような構成ならびに手順によっても、結合部材401と結合部材402とのがたつきが減る(無くなる)。この例では、凸部411の対応する凹部421との接触部分ならびにその近傍となる部位が、詰部430Dである。
<第5変形例>
第1実施形態の変形例の一つとしての図14,15に例示される動力伝達機構400Eは、上記動力伝達機構400,400A〜400Dと同様の構成を備える。よって、本変形例の動力伝達機構400Eによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図14,15に例示される動力伝達機構400Eは、上記動力伝達機構400,400A〜400Dと同様の構成を備える。よって、本変形例の動力伝達機構400Eによれば、同様の構成に基づく同様の作用や効果が得られる。
本変形例でも、上記第4変形例と同様、押点Pで押された凸部411が可動部440に押されて捩れる状態に変形しながら、凹部421内に食い込む(押し込まれる、圧入される)。また、凸部411は、変形する前に捩られた形状(図15で左側の部分が右側の部分よりも上に位置された傾斜状態)に構成されている。ただし、本変形例では、押点Pは、凸部411の中央部よりも捩れを解消する側(図14,15での左側)であって、かつ凸部411の根元側(基端側)にずれた位置に、設定される。このような構成ならびに手順によっても、結合部材401と結合部材402とのがたつきが減る(無くなる)。この例でも、凸部411の対応する凹部421との接触部分の近傍となる部位が、凹部421と凸部411との隙間を埋める詰部430Eである。また、本変形例によれば、凸部411の根元側(基端側)の押点Pを押すことにより、凸部411の先端部分の変形量を、押点Pでの可動部440の移動量よりも大きくできる場合がある。換言すれば、可動部440のストロークをより小さく設定できる場合がある。
<第2実施形態>
第1実施形態の変形例の一つとしての図16〜21に例示される動力伝達機構400Fは、上記動力伝達機構400,400A〜400Eと同様の構成を備える。よって、本変形例の動力伝達機構400Fによれば、同様の構成に基づく同様の作用や効果が得られる。
第1実施形態の変形例の一つとしての図16〜21に例示される動力伝達機構400Fは、上記動力伝達機構400,400A〜400Eと同様の構成を備える。よって、本変形例の動力伝達機構400Fによれば、同様の構成に基づく同様の作用や効果が得られる。
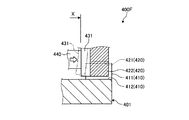
ただし、本実施形態では、詰部431が、結合部材402に、当該結合部材402とは別の部材として、設けられている。詰部431は、例えばリベットやねじ等の結合部432によって結合部材402に結合(接続、固定)されている。図16,17に示されるように、結合部432は、結合部材401から、軸方向と交叉する方向(例えば径方向、図16,17では上方向)に離れて位置されている。詰部431は、予め湾曲された(屈曲された)板状(帯板状、短冊状)の部材として構成されている。詰部431は、その先端部分が凹部412から軸方向の一方側(図16,19の左側)に離間する形状に、湾曲(屈曲)されている。複数の詰部431が、周方向に沿って間隔をあけて設けられている。複数の可動部440の各々は、複数のスペーサの各々に対応して設けられている。図16,17に示されるように、可動部440は、アクチュエータ304(図20参照)によって動かされて、軸方向の一方側の位置(P5)から、他方側の位置(P6)へ移動する。図17,19に示されるように、可動部440によって押された詰部431は、その先端部分が結合部材401の凹部412内に食い込む(押し込まれる、圧入される)状態となるまで、直線状に変形する。すなわち、本実施形態では、詰部431によって、結合部材401と結合部材402とのがたつきが減らせる(無くせる)。また、詰部431は、塑性変形するため、図18に示されるように、可動部440が位置P6から再び位置P5へ移動しても、詰部431は、直線状に変形した状態が維持される。なお、詰部431は、結合部材401と結合部材402との間に挿入されていると言うこともできる。よって、詰部431は、インサートや、プラグ、詰め物、スペーサ等とも称されうる。また、可動部440の先端部は、テーパ状ではなく、平面状に構成される。
また、本実施形態では、部材24(可動部440)が、ダンパ装置100の部材101(第一の部材)と部材102(第二の部材)との摩擦トルクを増大することが可能な可動部440としても機能する。可動部440は、アクチュエータ304(図20参照)によって部材26,25を介して軸方向に動かされる。可動部440は、位置P5(第一の位置、図18)と、位置P6(第二の位置、図17)との間で軸方向に移動することができる。位置P5では、部材101と部材102との相対的な回転が許容され、位置P6では、部材101と部材102との相対的な回転が抑制される。アクチュエータ304によって部材24(可動部440)が部材102(壁部121)に押し付けられ、これにより、摩擦部材104と部材101との摩擦面Sでの摩擦トルク(摩擦抵抗、摺動抵抗)が大きくなる。可動部440が位置P5に位置している状態、すなわち、可動部440によっては部材101と部材102との相対的な回転が抑制されていない状態では、部材101に、弾性部材103を介して、比較的質量の大きなクラッチ装置200が揺動可能に支持されている。よって、例えば、エンジンのクランキング中などの低回転の状態等で、シャフト1の回転変動が大きくなったり、クラッチ装置200の音や振動が大きくなったりする虞がある。
この点、本実施形態によれば、例えば、必要に応じて可動部440を位置P5(第一の位置、図18)から位置P6(第二の位置、図17)に移動することで、部材101(第一の部材)と部材102(第二の部材)との相対的な回転が抑制され(例えば停止され)、弾性部材103(第一の弾性部材)の弾性的な伸縮が抑制される(例えば伸縮しない状態となる)。よって、例えば、部材101に弾性部材103を介してクラッチ装置200が揺動可能に支持された状態が、解消されやすい。したがって、本実施形態によれば、例えば、回転変動や、音、振動等がより低減されやすい。
ここで、図20,21が参照されて、ダンパ装置100とクラッチ装置200(の回転伝達部20)とで共用されるアクチュエータ304の動作の一例が説明される。図20に示されるように、ダンパ装置100(クラッチ装置200)は、ECU301(electronic control unit)や、始動操作部302、スタータモータ303、アクチュエータ304、センサ305,306,307等を備える。ECU301は、制御部の一例である。始動操作部302は、例えば、イグニッションスイッチや、操作ボタン等である。アクチュエータ304は、可動部440(部材24)を軸方向に動かすとともに、可動部440を軸方向に押す力を発生することができる。アクチュエータ304は、例えば、リニアアクチュエータや、モータ等の駆動源と、運動変換機構(減速機構や、リンク機構、方向変換機構等)とを有することができる。センサ305は、少なくともエンジンが始動したか否かがわかる信号を取得するセンサ(例えば回転速度センサ)である。センサ306は、可動部440の移動量を検出するセンサである。センサ307は、アクチュエータ304の負荷を検出するセンサである。アクチュエータ304が例えばモータを有する場合、センサ306は、例えばモータの回転速度を検出するエンコーダであり、センサ307は、例えばモータに印加される電流を検出する電流センサである。センサ306,307は、可動部440の移動量に対応して変化するパラメータを検出する検出部の一例である。
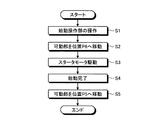
図21に示されるように、始動操作部302が操作されると(S1)、ECU301は、可動部440が位置P5(第一の位置)から位置P6(第二の位置)へ移動するよう、アクチュエータ304を制御する(S2)。ただし、S1終了時点で、既に可動部440が位置P6に位置している場合には、S2は省略される。次に、ECU301は、エンジン(図示されず)が駆動するよう、スタータモータ303を駆動し(S3)、始動が完了した時点で、すなわち、例えば、センサ305の信号からアイドリング状態が得られたと判断した時点で(S4)、可動部440が位置P6から位置P5へ移動するよう、アクチュエータ304を制御する(S5)。
このように、本実施形態では、例えば、部材101(第一の部材および第二の部材のうち一方、入力側の部材)がエンジンのシャフト1(出力シャフト)に接続され、可動部440は、エンジンの始動操作時には(S3)、既に位置P6に位置されており、始動完了後に(S4の後に)、位置P5へ移動する。よって、本実施形態によれば、エンジンが始動する前のクランキング状態、すなわち安定的なアイドリング状態が得られる前の状態で、部材101と部材102との相対的な回転が抑制され、例えば、回転変動や、音、振動等がより低減されやすい。
また、本実施形態では、例えば、エンジンが停止している状態で、すなわち、上記(S3)より前に、可動部440が位置P6に位置される。よって、本実施形態によれば、例えば、エンジンが始動される前に、可動部440が位置P6に位置された状態が得られる。なお、可動部440を位置P6に位置させるタイミングは、始動操作部302による操作後かつスタータモータ303の駆動前には限定されず、エンジンが停止された後(例えば、直後や、停止後の所定時間経過時点等)であればよい。また、ECU301は、始動操作部302の操作によらずエンジンを始動する場合にも、S2以降の処理を実行することができる。
また、本実施形態では、ECU301は、可動部440の移動量が所定量となるよう、アクチュエータ304を制御する。具体的には、図19に示されるように、可動部440の所定位置(例えば、位置P5)からの移動量(移動距離)が所定量xとなった場合(可動部440が位置P6に到達した場合)に、詰部431が所定の変形状態となるように構成されている。そして、センサ306により、可動部440の移動量が検出されるとともに、センサ307により、アクチュエータ304の負荷が検出される。可動部440の最初の移動によって詰部431が変形している途中の状態では、詰部431から可動部440に反力が作用する。よって、当該最初の移動では、可動部440の移動量が所定量xとなるまでの間、センサ307によって検出されるアクチュエータ304の負荷(推力)は大きい。詰部431の変形が完了した後は、詰部431からの反力が無くなるため、可動部440の移動量が所定量xとなるまでの間における、センサ307によって検出されるアクチュエータ304の負荷は小さい。よって、ECU301は、アクチュエータ304を駆動して、可動部440を少なくとも2回に亘って移動量x移動させ、センサ307によってアクチュエータ304の負荷を検出することで、詰部431の所期の変形状態が得られたか否かを推定することができる。
また、センサ306,307により、ECU301は、ダンパ装置100の可動部106が位置P6にある状態での、アクチュエータ304の負荷を検出することができる。よって、本実施形態では、例えば、ECU301(制御部)は、摩擦面Sに所期の力が印加されるよう、アクチュエータ304を制御することができる。また、センサ306によって検出された移動量と、センサ307によって検出された負荷との関係から、ECU301は、移動量が所定量x±α(α:許容長さ)となった状態での負荷(力)が閾値よりも低い(または閾値以下の)状態を、異常状態として検出することができる。この場合、ECU301は、例えば、表示や音声等による警報が出力されるよう、出力部(ランプ、ディスプレイ、スピーカ等)を制御することができる。
以上の本実施形態では、例えば、詰部431は、結合部材401(第一の結合部材)および結合部材402(第二の結合部材)のうち少なくとも一方(例えば、結合部材402)に支持されている。よって、本実施形態によれば、例えば、詰部431がより所望の形態に変形するよう構成されやすい場合がある。
また、本実施形態では、例えば、動力伝達機構400Fで用いられる可動部440とダンパ装置100で用いられる部材24(可動部440)とが、共用されている。よって、本実施形態によれば、例えば、これらを別個に備えた構成に比べて、構成がより簡素化されやすかったり、小型化されやすかったりする。
また、本実施形態では、例えば、可動部440は、所定量x(所定距離)動くことにより、詰部431を所定の状態(がたつきが減る状態)に変形させる。よって、本実施形態によれば、例えば、可動部440の移動量によって、詰部431が所定の状態に変形したか否かが確認されやすい。
また、本実施形態では、例えばセンサ306,307は、可動部440の移動量に応じて変化するパラメータを検出する。よって、本実施形態によれば、例えば、センサ306,307によって、可動部440の移動によって実行された処理や、可動部440の動作の状態等が、検出されやすい。
<第6変形例>
第2実施形態の変形例の一つとしての図22に例示される動力伝達機構400Gは、上記動力伝達機構400,400A〜400Fと同様の構成を備える。よって、本変形例の動力伝達機構400Gによれば、同様の構成に基づく同様の作用や効果が得られる。
第2実施形態の変形例の一つとしての図22に例示される動力伝達機構400Gは、上記動力伝達機構400,400A〜400Fと同様の構成を備える。よって、本変形例の動力伝達機構400Gによれば、同様の構成に基づく同様の作用や効果が得られる。
本変形例でも、詰部431Gは、結合部材401,402とは別部材である。ただし、本変形例では、結合部材401の凸部411と結合部材402の凹部421との間の隙間Sに、可動部440によって押された詰部431Gが食い込む(押し込まれる、圧入される)。詰部431Gは、円環状に構成された基部431aと、基部431aから突出した複数の突出部431bと、を有する。突出部431bは、例えばくさび状に構成される。隙間Sに挿入された突出部431bは変形し、結合部材401と結合部材402とのがたつきが減る(無くなる)。
以上、本発明の実施形態や変形例が例示されたが、上記実施形態や変形例はあくまで一例であって、発明の範囲を限定することは意図していない。上記実施形態や変形例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、組み合わせ、変更を行うことができる。また、各構成や、形状、等のスペック(構造や、種類、方向、形状、大きさ、長さ、幅、厚さ、高さ、数、配置、位置、材質等)は、適宜に変更して実施することができる。また、複数の実施形態や変形例間で、構成を部分的に入れ替えて実施することができる。例えば、本発明の動力伝達機構は、必ずしもクラッチ装置とダンパ装置との間に設けられなくてもよい。また、クラッチ装置やダンパ装置の構成は種々に変更可能である。また、二つの結合部材は、インボリュートスプラインで結合されてもよいし、キー溝で結合されてもよい。また、詰部の構成は種々に変更して実施することができる。
2…(第三の)部材、10…(第二の)回転伝達部、13…(第五の)部材、20…(第一の)回転伝達部、23…(第四の)部材、100…ダンパ装置、101…(第一の)部材、102…(第二の)部材、103…弾性部材、200…クラッチ装置、305,306,307…センサ(検出部)、400,400A〜400G…動力伝達機構、401…(第一の)結合部材、401a…外周面、402…(第二の)結合部材、402a…内周面、411…凸部、412…凹部、410…(第一の)噛合部、420…(第二の)噛合部、421…凹部、422…凸部、430,430A〜430E,431,431G…詰部、440…可動部、Ax…回転中心、P3…(第一の)位置、P4…(第二の)位置。
Claims (12)
- 回転中心回りに回転可能に設けられ、凹部または凸部を含む第一の噛合部が設けられた外周面を有した、第一の結合部材と、
前記回転中心回りに回転可能に設けられ、前記第一の結合部材を前記回転中心の径方向の外側から覆い、凹部または凸部を含み前記第一の噛合部と噛み合う第二の噛合部が設けられた内周面を有した、第二の結合部材と、
移動可能に設けられた可動部と、
前記第一の噛合部と前記第二の噛合部とが噛み合った状態で、前記可動部の動きにより、前記第一の結合部材と前記第二の結合部材との間の隙間を詰める詰部と、
を備えた、動力伝達機構。 - 前記詰部は、前記第一の結合部材および前記第二の結合部材のうち少なくとも一方の一部である、請求項1に記載の動力伝達機構。
- 前記詰部は、前記第一の結合部材および前記第二の結合部材のうち少なくとも一方に支持された、請求項1に記載の動力伝達機構。
- 前記可動部は、前記回転中心の軸方向に沿って移動可能に設けられた、請求項1〜3のうちいずれか一つに記載の動力伝達機構。
- 前記詰部は、前記可動部の移動方向とは異なる方向に変形する、請求項1〜4のうちいずれか一つに記載の動力伝達機構。
- 前記可動部は、前記回転中心回りに回転可能に設けられた第一の部材と、前記回転中心回りに回転可能に設けられた第二の部材と、前記第一の部材と前記第二の部材との相対的な回転に伴って弾性的に伸縮する弾性部材と、を有したダンパ装置に対応して設けられ、前記第一の部材と前記第二の部材との相対的な回転を許容する第一の位置と、前記第一の部材と前記第二の部材との相対的な回転を抑制する第二の位置との間で移動可能に設けられた、請求項1〜5のうちいずれか一つに記載の動力伝達機構。
- 前記可動部は、前記回転中心回りに回転可能に設けられた第三の部材と、前記回転中心回りに回転可能に設けられるとともに前記回転中心の軸方向に移動可能に設けられた第四の部材と、前記第三の部材と前記第四の部材との間で摩擦によってトルクが伝達されるとともに前記第四の部材の位置によって伝達されるトルクの大きさが変化する第一の回転伝達部と、を備えたクラッチ装置の、前記第四の部材を、前記軸方向に動かす、請求項1〜6のうちいずれか一つに記載の動力伝達機構。
- 前記可動部は、摩擦によって伝達されるトルクが大きくなるように前記第四の部材を動かす方向とは逆の方向に動くことにより、前記詰部を前記第一の結合部材と前記第二の結合部材との間の隙間を詰める状態にする、請求項7に記載の動力伝達機構。
- 前記クラッチ装置は、前記回転中心回りに回転可能に設けられた第五の部材と、前記第三の部材と前記第五の部材との間で摩擦によってトルクが伝達されるとともに前記第五の部材の位置によって伝達されるトルクの大きさが変化する第二の回転伝達部と、を備えた、請求項8に記載の動力伝達機構。
- 前記可動部は、所定距離動くことにより、前記詰部を前記第一の結合部材と前記第二の結合部材との間の隙間を詰める状態にする、請求項1〜9のうちいずれか一つに記載の動力伝達機構。
- さらに、前記可動部の移動量に対応して変化するパラメータを検出する検出部を備えた、請求項10に記載の動力伝達機構。
- 前記動力伝達機構は、車両用のエンジンとトランスミッションとの間でトルクを伝達し、
前記可動部は、前記エンジンと前記トランスミッションとが一体化された後前記エンジンが回転するまでの間、または前記エンジンおよび前記トランスミッションが車両に組み付けられた後前記エンジンが回転するまでの間に動くことにより、前記詰部を前記第一の結合部材と前記第二の結合部材との間の隙間を詰める状態にする、請求項1〜11のうちいずれか一つに記載の動力伝達機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014059142A JP2015183733A (ja) | 2014-03-20 | 2014-03-20 | 動力伝達機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014059142A JP2015183733A (ja) | 2014-03-20 | 2014-03-20 | 動力伝達機構 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015183733A true JP2015183733A (ja) | 2015-10-22 |
Family
ID=54350513
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014059142A Pending JP2015183733A (ja) | 2014-03-20 | 2014-03-20 | 動力伝達機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015183733A (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62163329U (ja) * | 1986-04-01 | 1987-10-17 | ||
| JP2004340331A (ja) * | 2003-05-19 | 2004-12-02 | Toyota Industries Corp | 摩擦ディスクを備える装置 |
| JP2006342941A (ja) * | 2005-06-10 | 2006-12-21 | Jtekt Corp | 駆動力伝達装置の取付構造 |
| JP2012036976A (ja) * | 2010-08-06 | 2012-02-23 | Aisin Seiki Co Ltd | ダンパ装置 |
-
2014
- 2014-03-20 JP JP2014059142A patent/JP2015183733A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62163329U (ja) * | 1986-04-01 | 1987-10-17 | ||
| JP2004340331A (ja) * | 2003-05-19 | 2004-12-02 | Toyota Industries Corp | 摩擦ディスクを備える装置 |
| JP2006342941A (ja) * | 2005-06-10 | 2006-12-21 | Jtekt Corp | 駆動力伝達装置の取付構造 |
| JP2012036976A (ja) * | 2010-08-06 | 2012-02-23 | Aisin Seiki Co Ltd | ダンパ装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5277108B2 (ja) | 多板式クラッチ | |
| JP4962997B2 (ja) | クラッチ操作装置 | |
| EP3006774A1 (en) | Damper apparatus with torque limiter | |
| JP4949887B2 (ja) | ドグクラッチアクチュエータ | |
| JP2018506005A (ja) | 遊星転動型ねじ山付きスピンドル機構を備えたアクチュエータ | |
| US10012269B2 (en) | Meshing-type engagement device | |
| JP6471486B2 (ja) | ダンパ装置 | |
| US9631678B2 (en) | Clutch apparatus | |
| JP6318746B2 (ja) | ダンパ装置 | |
| JP2011256916A (ja) | クラッチ装置 | |
| JP4975723B2 (ja) | モータサイクル用クラッチ装置 | |
| JP2015183733A (ja) | 動力伝達機構 | |
| JP6013236B2 (ja) | シンクロ装置 | |
| JP2005308092A (ja) | 多板式クラッチ装置 | |
| AU2009251222A1 (en) | Multiple disk clutch device and clutch disk assembly | |
| JP6331991B2 (ja) | クラッチ装置 | |
| JP3944218B2 (ja) | モータサイクル用クラッチ装置 | |
| JP5431530B2 (ja) | ツインクラッチ装置 | |
| JP2012163139A (ja) | クラッチ装置 | |
| JP6318754B2 (ja) | ダンパ装置 | |
| JP2009191868A (ja) | 車両の制御装置および制御方法 | |
| JP3940246B2 (ja) | クラッチ装置 | |
| JP2011089540A (ja) | クラッチ機構 | |
| JP2013061032A (ja) | クラッチ装置 | |
| JP2015001268A (ja) | クラッチ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171226 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180626 |