JP2015190821A - 回転体、回転基準検出装置、および翼振動データ取得装置 - Google Patents
回転体、回転基準検出装置、および翼振動データ取得装置 Download PDFInfo
- Publication number
- JP2015190821A JP2015190821A JP2014067489A JP2014067489A JP2015190821A JP 2015190821 A JP2015190821 A JP 2015190821A JP 2014067489 A JP2014067489 A JP 2014067489A JP 2014067489 A JP2014067489 A JP 2014067489A JP 2015190821 A JP2015190821 A JP 2015190821A
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- rotation
- blade
- light
- color portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Testing Of Balance (AREA)
Abstract
Description
また、本発明の別の目的は、このような回転体を備える回転基準検出装置および翼振動データ取得装置を提供することにある。
前記回転軸まわりの周方向に延びる周面を含み、該周面における前記周方向の設定位置に回転基準が設けられており、
回転体が一回転する度に、回転する前記回転基準が、基準検出用の光センサからの光が照射される基準通過静止位置を通過することにより、基準通過静止位置からの反射光の強度が変化し、この変化に基づいて回転基準信号が生成され、
前記回転体は、前記周面において、前記周方向に隣接する暗色部と明色部とを含み、暗色部と明色部との境界が前記回転基準として機能し、
暗色部は、前記周面の土台となる金属に、化成処理を施すことにより形成された暗色の化成被膜であり、明色部は、暗色部よりも高い光の反射率を有する、ことを特徴とする回転体が提供される。
基準検出用の光センサは、基準通過静止位置に光を照射し、基準通過静止位置からの反射光を受け、前記回転基準が基準通過静止位置を通過する時に生じる前記反射光の強度変化を示す回転基準信号を出力する、ことを特徴とする回転基準検出装置が提供される。
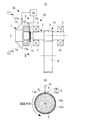
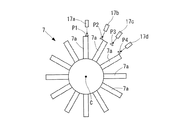
前記回転体は、前記回転軸と平行な軸方向の設定位置にて、前記周方向に間隔をおいて設けられた複数の回転翼を有するインペラを含み、
前記回転翼を検出する翼検出用の光センサを備え、翼検出用の光センサは、翼通過静止位置に光を照射し、回転翼が翼通過静止位置にある時に、該回転翼から該光の反射光を受け、この反射光による翼検出信号を出力し、
基準検出用の光センサからの前記回転基準信号と、翼検出用の光センサからの翼検出信号とから、該翼検出信号に対応する回転翼が、複数の回転翼のいずれであるかを認識するとともに、周期的に出力される前記回転基準信号に基づいて前記回転体の回転周期または回転数を求め、該認識と該回転周期または回転数に基づいて、該回転翼の振動を表わす振動データを求める信号処理部を備える、ことを特徴とする翼振動データ取得装置が提供される。
すなわち、回転基準が基準通過静止位置を通過することを検出するセンサの種類と、回転翼が翼通過静止位置を通過することを検出するセンサの種類とが互いに異なる場合(例えば、前者が光学式であり、後者が磁気式の場合)には、回転基準が基準通過静止位置を通過した時点から、その旨を示す回転基準信号が出力されるまでの応答時間と、回転翼が翼通過静止位置を通過した時点から、その旨を示す翼検出信号が出力されるまでの応答時間とに差が生じる可能性がある。この差により、基準通過静止位置を通過した回転翼が、複数の回転翼のいずれであるかを正しく認識できなくなる可能性がある。回転基準信号の出力時点に対する翼検出信号の出力時点の位相により、この翼検出信号に対応する回転翼が、信号処理部に認識されるからである。
これに対して、本発明の翼振動データ取得装置では、光を用いる同じ種類のセンサを用いるので、応答時間に差が生じることを回避できる。
前記回転基準は、前記軸方向に関して、前記複数の被支持部のうち前記インペラに最も近い被支持部と、前記インペラとの間に位置する。
また、回転体の周面の土台となる金属が周方向全体にわたって既に研磨されている場合でも、この金属上に化成被膜を形成することにより回転基準を構成することができる。
さらに、暗色の化成被膜(暗色部)と、光の反射率が高い明色部との境界が回転基準であるので、回転基準が、基準通過静止位置を通過することにより、基準通過静止位置からの反射光の強度が大きく変化する。したがって、回転基準を高精度に検出できる。
よって、回転体における外周面の研磨の有無にかかわらず、キー溝や塗料を用いなくても、高精度に回転基準を検出できる。
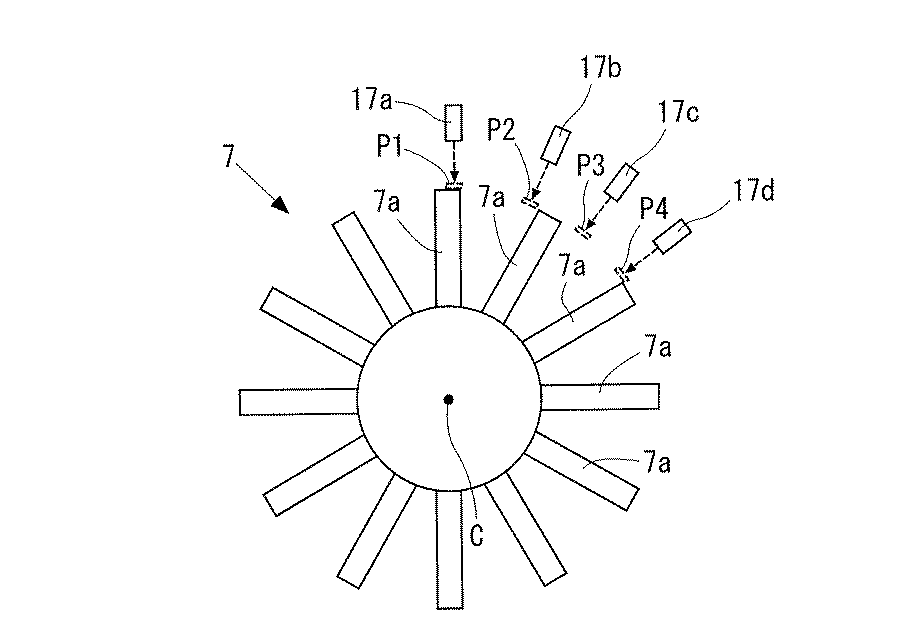
T12は、特定の回転翼7aが第1の翼通過静止位置P1を通過した時に第1の光センサ17aがこの回転翼7aからの反射光による翼検出信号を出力した時点と、同じ特定の回転翼7aが第2の翼通過静止位置P2を通過した時に第2の光センサ17bがこの回転翼7aからの反射光による翼検出信号を出力した時点との時間差である。
T23は、上述と同じ特定の回転翼7aが第2の翼通過静止位置P2を通過した時に第2の光センサ17bがこの回転翼7aからの反射光による翼検出信号を出力した時点と、同じ特定の回転翼7aが第3の翼通過静止位置P3を通過した時に第3の光センサ17cがこの回転翼7aからの反射光による翼検出信号を出力した時点との時間差である。
T34は、上述と同じ特定の回転翼7aが第3の翼通過静止位置P3を通過した時に第3の光センサ17cがこの回転翼7aからの反射光による翼検出信号を出力した時点と、同じ特定の回転翼7aが第4の翼通過静止位置P4を通過した時に第4の光センサ17dがこの回転翼7aからの反射光による翼検出信号を出力した時点との時間差である。
T12,T23,T34は、基準検出用の光センサ15から出力される回転基準信号と、第1〜第4の光センサ17a,17b,17c,17dから出力される翼検出信号とに基づいて、信号処理部19により求められる。
Sθ1は、基準検出用の光センサ15に対する第1の光センサ17aの周方向位置を示す角度である。Sθ2は、基準検出用の光センサ15に対する第2の光センサ17bの周方向位置を示す角度である。Sθ3は、基準検出用の光センサ15に対する第3の光センサ17cの周方向位置を示す角度である。Sθ4は、基準検出用の光センサ15に対する第4の光センサ17dの周方向位置を示す角度である。Sθ1,Sθ2,Sθ3,Sθ4は、既知である。
rは、回転体10の回転数であり、基準検出用の光センサ15から周期的に出力される回転基準信号に基づいて求められる。
Bθは、回転基準Rに対する上述の特定の回転翼7aの周方向位置を示す角度である。Bθは既知である。
上述では、明色部13bは、外部に露出した回転体10の地金10aまたは金属メッキ層10bであったが、この地金10aまたは金属メッキ層10b上に塗布した、明色(好ましくは白色)の塗料であってもよい。この場合、この塗料が、回転体10の回転による遠心力の作用で剥がれても、明色部13bとして機能する回転体10の地金10aまたは金属メッキ層10bが外部に露出するので、回転基準Rを高精度に検出できる。
上述では、周面13は、半径方向外側を向く外周面であったが、周面13は、軸方向側を向く側面であってもよい。
上述では、回転体10は、産業用圧縮機に設けられるものであったが、回転体10は、他の流体機械(回転機械)に設けられ、その回転軸Cまわりに回転駆動されるものであってもよい。この場合、回転体10は、歯車5以外の手段で回転駆動されてもよいし、上述したインペラ7は、流体を圧縮するインペラであっても、流体により回転駆動されるインペラであってもよい。
本願において、回転体10は、その回転軸Cまわりに回転駆動される、様々な機械の歯車であってもよい。この場合、上述の周面13は、例えば、軸方向側を向く側面である。また、この場合、このような変更点以外は、上述したように、この回転体10と、上述の基準検出用の光センサ15とは、上述の回転基準検出装置20の構成要素となる。この場合、回転体10である歯車が上述した歯車5であるとして、この歯車が上述の翼振動データ取得装置30の構成要素であってもよい。
上述と違って、回転基準信号は、基準通過静止位置PRに明色部13bがある時に基準検出用の光センサ15が出力する電気信号の大きさから、基準通過静止位置PRに暗色部13aがある時に基準検出用の光センサ15が出力する電気信号の大きさへの変化であってもよい。
上述では、周面13において、明色部13b以外の領域はすべて暗色部13aであり、または、暗色部13a以外の領域はすべて明色部13bであったが、周面13において、明色部13b以外の領域のすべてを暗色部13aにしなくてもよく、暗色部13a以外の領域のすべてを明色部13bにしなくてもよい。すなわち、明色部13bと暗色部13aとの境界による反射光の強度変化による回転基準信号が出力され、この回転基準信号が適宜の手段で認識できさえすればよい。
上述の実施形態では、暗色部13aは、クロメート被膜であったが、本発明によると、暗色部13aは、周面13の土台となる金属に、化成処理を施すことにより形成された暗色の化成被膜でありさえすればよい。例えば、化成処理は、リン酸塩処理であり、化成被膜13aは、リン酸塩被膜であり、化成処理液は、リン酸塩溶液であってもよい。この例において、周面13の土台となる金属の材質と、この金属に接触させるリン酸塩溶液の成分は、リン酸塩被膜13aの色が暗色になるように選択される。
上述では、回転体10の回転時に出力される回転基準信号により、回転体10の回転周期または回転数が求められたが、回転体10の回転角を求めるために、回転基準信号が用いられてもよい。この場合、回転体10の回転中において、回転基準信号の出力時点と現時点との時間差に基づいて、回転体10が基準姿勢から回転した角度である回転角が求められてよい。
Claims (7)
- 回転軸まわりに回転駆動される回転体であって、
前記回転軸まわりの周方向に延びる周面を含み、該周面における前記周方向の設定位置に回転基準が設けられており、
回転体が一回転する度に、回転する前記回転基準が、基準検出用の光センサからの光が照射される基準通過静止位置を通過することにより、基準通過静止位置からの反射光の強度が変化し、この変化に基づいて回転基準信号が生成され、
前記回転体は、前記周面において、前記周方向に隣接する暗色部と明色部とを含み、暗色部と明色部との境界が前記回転基準として機能し、
暗色部は、前記周面の土台となる金属に、化成処理を施すことにより形成された暗色の化成被膜であり、明色部は、暗色部よりも高い光の反射率を有する、ことを特徴とする回転体。 - 前記化成処理はクロメート処理であり、前記化成被膜はクロメート被膜である、ことを特徴とする請求項1に記載の回転体。
- 前記化成被膜の色は黒である、ことを特徴とする請求項1または2に記載の回転体。
- 前記明色部は、回転体の地金、または、回転体の地金上に形成された金属メッキ層である、ことを特徴とする、請求項1、2または3に記載の回転体。
- 請求項1〜4のいずれか一項に記載の回転体と、前記回転基準を検出する基準検出用の光センサと、を備え、
基準検出用の光センサは、基準通過静止位置に光を照射し、基準通過静止位置からの反射光を受け、前記回転基準が基準通過静止位置を通過する時に生じる前記反射光の強度変化を示す回転基準信号を出力する、ことを特徴とする回転基準検出装置。 - 請求項5に記載の回転基準検出装置を備える翼振動データ取得装置であって、
前記回転体は、前記回転軸と平行な軸方向の設定位置にて、前記周方向に間隔をおいて設けられた複数の回転翼を有するインペラを含み、
前記回転翼を検出する翼検出用の光センサを備え、翼検出用の光センサは、翼通過静止位置に光を照射し、回転翼が翼通過静止位置にある時に、該回転翼から該光の反射光を受け、この反射光による翼検出信号を出力し、
基準検出用の光センサからの前記回転基準信号と、翼検出用の光センサからの翼検出信号とから、該翼検出信号に対応する回転翼が、複数の回転翼のいずれであるかを認識するとともに、周期的に出力される前記回転基準信号に基づいて前記回転体の回転周期または回転数を求め、該認識と該回転周期または回転数に基づいて、該回転翼の振動を表わす振動データを求める信号処理部を備える、ことを特徴とする翼振動データ取得装置。 - 前記回転体は、前記軸方向に間隔をおいて位置し、それぞれ、複数のラジアル軸受に支持される複数の被支持部を含み、
前記回転基準は、前記軸方向に関して、前記複数の被支持部のうち前記インペラに最も近い被支持部と、前記インペラとの間に位置する、ことを特徴とする請求項6に記載の翼振動データ取得装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067489A JP6268596B2 (ja) | 2014-03-28 | 回転体、回転基準検出装置、および翼振動データ取得装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014067489A JP6268596B2 (ja) | 2014-03-28 | 回転体、回転基準検出装置、および翼振動データ取得装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015190821A true JP2015190821A (ja) | 2015-11-02 |
| JP6268596B2 JP6268596B2 (ja) | 2018-01-31 |
Family
ID=
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105928658A (zh) * | 2016-04-29 | 2016-09-07 | 沈阳鼓风机集团股份有限公司 | 组装式压缩机转子的高速动平衡方法及装置 |
| CN110261037A (zh) * | 2019-07-09 | 2019-09-20 | 中国航发哈尔滨东安发动机有限公司 | 一种带金属海绵体的离心通风器动平衡工装及方法 |
| CN119534393A (zh) * | 2024-11-22 | 2025-02-28 | 中国航发沈阳黎明航空发动机有限责任公司 | 航空发动机的压气机转子叶片吸光膜识别法及该膜的制备 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57200832A (en) * | 1981-06-04 | 1982-12-09 | Toyota Motor Corp | Rotor with blade and manufacture thereof and unbalance measuring method using said rotor |
| JPH0534234A (ja) * | 1991-08-05 | 1993-02-09 | Nissan Motor Co Ltd | 回転体のアンバランス測定装置 |
| JPH0743206A (ja) * | 1993-07-30 | 1995-02-14 | Hitachi Ltd | 回転翼の振動計測方法及び装置 |
| US5502650A (en) * | 1992-04-01 | 1996-03-26 | Kabushiki Kaisha Toshiba | Apparatus for adjusting rotor |
| JPH11256352A (ja) * | 1998-03-06 | 1999-09-21 | Nippon Steel Corp | 意匠性に優れた金属材料およびその製造方法 |
| JP2001165089A (ja) * | 1999-12-06 | 2001-06-19 | Mitsubishi Heavy Ind Ltd | 非接触翼振動計測装置 |
| JP2007154286A (ja) * | 2005-12-08 | 2007-06-21 | Katano Mekki Kogyosho:Kk | 三価黒色クロメート処理液、三価黒色クロメート皮膜及び三価黒色クロメート皮膜の形成方法 |
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57200832A (en) * | 1981-06-04 | 1982-12-09 | Toyota Motor Corp | Rotor with blade and manufacture thereof and unbalance measuring method using said rotor |
| JPH0534234A (ja) * | 1991-08-05 | 1993-02-09 | Nissan Motor Co Ltd | 回転体のアンバランス測定装置 |
| US5502650A (en) * | 1992-04-01 | 1996-03-26 | Kabushiki Kaisha Toshiba | Apparatus for adjusting rotor |
| JPH0743206A (ja) * | 1993-07-30 | 1995-02-14 | Hitachi Ltd | 回転翼の振動計測方法及び装置 |
| JPH11256352A (ja) * | 1998-03-06 | 1999-09-21 | Nippon Steel Corp | 意匠性に優れた金属材料およびその製造方法 |
| JP2001165089A (ja) * | 1999-12-06 | 2001-06-19 | Mitsubishi Heavy Ind Ltd | 非接触翼振動計測装置 |
| JP2007154286A (ja) * | 2005-12-08 | 2007-06-21 | Katano Mekki Kogyosho:Kk | 三価黒色クロメート処理液、三価黒色クロメート皮膜及び三価黒色クロメート皮膜の形成方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105928658A (zh) * | 2016-04-29 | 2016-09-07 | 沈阳鼓风机集团股份有限公司 | 组装式压缩机转子的高速动平衡方法及装置 |
| CN105928658B (zh) * | 2016-04-29 | 2018-12-11 | 沈阳鼓风机集团股份有限公司 | 组装式压缩机转子的高速动平衡方法及装置 |
| CN110261037A (zh) * | 2019-07-09 | 2019-09-20 | 中国航发哈尔滨东安发动机有限公司 | 一种带金属海绵体的离心通风器动平衡工装及方法 |
| CN119534393A (zh) * | 2024-11-22 | 2025-02-28 | 中国航发沈阳黎明航空发动机有限责任公司 | 航空发动机的压气机转子叶片吸光膜识别法及该膜的制备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3054292A1 (en) | Apparatus and method for diagnosing abnormality of bearing | |
| US7987725B2 (en) | Method of matching sensors in a multi-probe turbine blade vibration monitor | |
| CA2662034C (en) | Permanent magnet rotor crack detection | |
| RU2527673C2 (ru) | Способ обнаружения структурного дефекта в механическом узле, содержащем вращающийся элемент | |
| JP2016061634A (ja) | 転がり軸受の異常診断装置、風力発電装置、及び転がり軸受の異常診断方法 | |
| EP2500696B1 (en) | Axis run-out measuring method and angle detecting device with self-calibration function having axis run-oout measuring function | |
| JP2012026481A (ja) | 軸受の損傷検出方法 | |
| JP6594330B2 (ja) | 回転角センサ | |
| JP7595070B2 (ja) | 測定装置 | |
| CN105651515B (zh) | 航空发动机中介轴承故障检测方法及检测装置 | |
| FR2986864A1 (fr) | Methode de mesure de la deformation d'une aube de turbomachine au cours du fonctionnement de la turbomachine | |
| US11536740B2 (en) | Pitch control assembly for an aircraft-bladed rotor | |
| Leclere et al. | An analysis of instantaneous angular speed measurement errors | |
| JP6268596B2 (ja) | 回転体、回転基準検出装置、および翼振動データ取得装置 | |
| JP2015190821A (ja) | 回転体、回転基準検出装置、および翼振動データ取得装置 | |
| JP2012137335A (ja) | 動翼の振動計測方法および動翼の振動計測装置 | |
| JP2004270898A (ja) | センサ付き転がり軸受ユニット | |
| EP3087357B1 (fr) | Ensemble pour turbomachine pour mesurer des vibrations subies par une pale en rotation | |
| JP2021032769A (ja) | 転がり軸受の状態監視方法及び状態監視装置 | |
| CN106917726B (zh) | 转角检测方法及系统、风力发电机 | |
| Bellini et al. | Diagnosis of mechanical faults by spectral kurtosis energy | |
| JP6455702B2 (ja) | 回転体の振動計測方法と装置 | |
| JP5459533B2 (ja) | アンバランス計測方法と装置 | |
| JP2004132821A (ja) | 回転翼の振動計測方法 | |
| CN109736949B (zh) | 用于喷油泵信号盘的检测装置及检测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171214 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6268596 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |