JP2015205302A - シーム溶接システム、シーム溶接方法および被溶接物の生産方法 - Google Patents
シーム溶接システム、シーム溶接方法および被溶接物の生産方法 Download PDFInfo
- Publication number
- JP2015205302A JP2015205302A JP2014086818A JP2014086818A JP2015205302A JP 2015205302 A JP2015205302 A JP 2015205302A JP 2014086818 A JP2014086818 A JP 2014086818A JP 2014086818 A JP2014086818 A JP 2014086818A JP 2015205302 A JP2015205302 A JP 2015205302A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- roller
- seam welding
- workpiece
- roller electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/06—Resistance welding; Severing by resistance heating using roller electrodes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/06—Resistance welding; Severing by resistance heating using roller electrodes
- B23K11/065—Resistance welding; Severing by resistance heating using roller electrodes for welding curved planar seams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/24—Electric supply or control circuits therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/24—Electric supply or control circuits therefor
- B23K11/25—Monitoring devices
- B23K11/252—Monitoring devices using digital means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/30—Features relating to electrodes
- B23K11/3036—Roller electrodes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/30—Features relating to electrodes
- B23K11/31—Electrode holders and actuating devices therefor
- B23K11/314—Spot welding guns, e.g. mounted on robots
- B23K11/315—Spot welding guns, e.g. mounted on robots with one electrode moving on a linear path
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Resistance Welding (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
- Butt Welding And Welding Of Specific Article (AREA)
Abstract
Description
10 ロボット
11 基台部
12 旋回ベース
13 ロボットアーム
13a 下部アーム
13b 上部アーム
13c 手首部
13d フランジ部
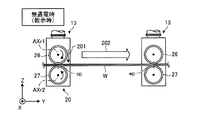
20 溶接ガン
21 フレーム
22 可動ブロック
23 固定ブロック
24 シリンダ
25 レール
26、27 ローラ電極
30、30’ 制御装置
31 制御部
31a 逆キネマティクス演算部
31b 電極回転指令部
31c、31c’ 補正部
31ca 平均トルク取得部
31cb ローパスフィルタ
31cc 不感帯
31cd 目標トルク
31ce PID制御部
31cf リミッタ
32 記憶部
32a 教示情報
200 範囲
AXr1、AXr2 軸
AZr 進行角度
B 軸
L 軸
M1〜M8 サーボモータ
R 軸
S 旋回軸
T 軸
U 軸
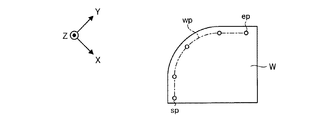
W ワーク
ep 終点
sp 始点
wl 溶接線
wp 溶接予定線
Claims (7)
- 一対設けられ、互いの周縁部で被溶接物を挟み付けつつ回転しながら通電されることによって前記被溶接物をシーム溶接するローラ電極と、
前記ローラ電極が取り付けられ、該ローラ電極を前記被溶接物の溶接線に沿って移動させる電極移動機構と、
前記電極移動機構の関節および前記ローラ電極それぞれを回転させる複数の駆動源と、
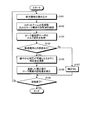
前記ローラ電極に作用するトルクが予め設定された範囲内となるように前記駆動源のトルク変化に基づいて前記ローラ電極の回転量を制御する制御部と
を備えることを特徴とするシーム溶接システム。 - 前記制御部は、
前記駆動源のうち前記電極移動機構の関節を回転させる前記駆動源のトルク変化に基づいて前記ローラ電極の回転量を制御すること
を特徴とする請求項1に記載のシーム溶接システム。 - 前記制御部は、
前記駆動源のうち前記ローラ電極を回転させる前記駆動源のトルク変化に基づいて前記ローラ電極の回転量を制御すること
を特徴とする請求項1に記載のシーム溶接システム。 - 前記制御部は、
一対の前記ローラ電極それぞれに作用するトルクの平均値が略一定となるように該ローラ電極の回転量を制御すること
を特徴とする請求項1、2または3に記載のシーム溶接システム。 - 前記制御部は、
前記ローラ電極の回転量を緩やかに変化させること
を特徴とする請求項1〜4のいずれか一つに記載のシーム溶接システム。 - 電極移動機構に一対設けられ、互いの周縁部で被溶接物を挟み付けつつ回転しながら通電されることによって前記被溶接物をシーム溶接するローラ電極を、前記電極移動機構を用いて前記被溶接物の溶接線に沿って移動させる工程と、
前記ローラ電極に作用するトルクが予め設定された範囲内となるように、前記電極移動機構の関節および前記ローラ電極それぞれを回転させる複数の駆動源のいずれかのトルク変化に基づいて前記ローラ電極の回転量を制御する工程と
を含むことを特徴とするシーム溶接方法。 - 電極移動機構に一対設けられ、互いの周縁部で被溶接物を挟み付けつつ回転しながら通電されることによって前記被溶接物をシーム溶接するローラ電極を、前記電極移動機構を用いて前記被溶接物の溶接線に沿って移動させる工程と、
前記ローラ電極に作用するトルクが予め設定された範囲内となるように、前記電極移動機構の関節および前記ローラ電極それぞれを回転させる複数の駆動源のいずれかのトルク変化に基づいて前記ローラ電極の回転量を制御する工程と
を含むことを特徴とする被溶接物の生産方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014086818A JP6511626B2 (ja) | 2014-04-18 | 2014-04-18 | シーム溶接システム、シーム溶接方法および被溶接物の生産方法 |
| CN201510059539.9A CN105033431B (zh) | 2014-04-18 | 2015-02-04 | 缝焊系统、缝焊方法及被焊接物的生产方法 |
| US14/689,057 US10543560B2 (en) | 2014-04-18 | 2015-04-17 | Seam welding system, seam welding method, and method for producing a to-be-welded object with roller electrodes |
| EP15163995.2A EP2957375B8 (en) | 2014-04-18 | 2015-04-17 | Seam welding system and method for producing a to-be-welded object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014086818A JP6511626B2 (ja) | 2014-04-18 | 2014-04-18 | シーム溶接システム、シーム溶接方法および被溶接物の生産方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015205302A true JP2015205302A (ja) | 2015-11-19 |
| JP6511626B2 JP6511626B2 (ja) | 2019-05-15 |
Family
ID=53002518
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014086818A Expired - Fee Related JP6511626B2 (ja) | 2014-04-18 | 2014-04-18 | シーム溶接システム、シーム溶接方法および被溶接物の生産方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10543560B2 (ja) |
| EP (1) | EP2957375B8 (ja) |
| JP (1) | JP6511626B2 (ja) |
| CN (1) | CN105033431B (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5927610B2 (ja) * | 2012-06-01 | 2016-06-01 | 高周波熱錬株式会社 | 通電装置、通電方法、及び通電加熱装置 |
| KR102449175B1 (ko) | 2017-08-01 | 2022-09-29 | 엘지전자 주식회사 | 진공단열체 및 냉장고 |
| KR102529116B1 (ko) * | 2017-08-01 | 2023-05-08 | 엘지전자 주식회사 | 진공단열체, 진공단열체의 제작방법, 및 그 진공단열체로 단열하는 냉온장고 |
| KR102427466B1 (ko) | 2017-08-01 | 2022-08-01 | 엘지전자 주식회사 | 차량, 차량용 냉장고, 및 차량용 냉장고의 제어방법 |
| KR102449177B1 (ko) | 2017-08-01 | 2022-09-29 | 엘지전자 주식회사 | 진공단열체 및 냉장고 |
| KR102459784B1 (ko) | 2017-08-01 | 2022-10-28 | 엘지전자 주식회사 | 진공단열체 및 냉장고 |
| KR102459786B1 (ko) | 2017-08-16 | 2022-10-28 | 엘지전자 주식회사 | 진공단열체 및 냉장고 |
| JP6728291B2 (ja) * | 2018-09-28 | 2020-07-22 | 本田技研工業株式会社 | シーム溶接装置及びシーム溶接方法 |
| CN109877435B (zh) * | 2019-04-23 | 2021-11-30 | 广东华士科技股份有限公司 | 一种便携式屋顶缝焊机 |
| CN110315257B (zh) * | 2019-06-19 | 2024-09-03 | 浙江正泰电器股份有限公司 | 焊接设备 |
| CN117369244B (zh) * | 2023-11-08 | 2024-07-09 | 重庆衍数自动化设备有限公司 | 一种基于焊接机器人焊枪位置控制优化方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6213276A (ja) * | 1985-07-10 | 1987-01-22 | Honda Motor Co Ltd | 自動シ−ム溶接装置における制御方法 |
| WO1996029174A1 (en) * | 1995-03-17 | 1996-09-26 | Kabushiki Kaisha Yaskawa Denki | Seam welding method and apparatus |
| JPH09234566A (ja) * | 1996-02-28 | 1997-09-09 | Stola Spa | 自動車の車体またはその副構体の溶接装置 |
| WO2011034354A2 (ko) * | 2009-09-16 | 2011-03-24 | 주식회사 효성 | 이동식 심용접기 및 그 용접 제어방법 |
| JP2013059772A (ja) * | 2011-09-12 | 2013-04-04 | Honda Motor Co Ltd | シーム溶接システム及びシーム溶接方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2412069A (en) * | 1944-06-16 | 1946-12-03 | Taylor Winfield Corp | Driving means for roller electrodes and the like |
| IT1268100B1 (it) * | 1994-10-07 | 1997-02-20 | Stola Spa | Dispositivo per la saldatura di scocche di autoveicolo o di loro sotto-gruppi. |
| JP2007167896A (ja) * | 2005-12-21 | 2007-07-05 | Nachi Fujikoshi Corp | シーム溶接機、シーム溶接装置、シーム溶接ロボットシステム、シーム溶接方法及びローラ電極の回転駆動制御プログラム作成方法 |
| JP5236507B2 (ja) | 2009-01-07 | 2013-07-17 | 本田技研工業株式会社 | シーム溶接方法及びシーム溶接装置 |
| EP2243586B1 (de) * | 2009-04-22 | 2014-07-02 | KUKA Roboter GmbH | Verfahren und Kontrollvorrichtung zum Schweißen mittels einer Positioniervorrichtung |
| US7918380B1 (en) * | 2010-02-18 | 2011-04-05 | Letzkus Kenneth R | Method and apparatus for manufacturing welded tapered tubes |
| JP2011194453A (ja) * | 2010-03-23 | 2011-10-06 | Honda Motor Co Ltd | シーム溶接方法及びその装置 |
| JP5170175B2 (ja) * | 2010-06-30 | 2013-03-27 | 株式会社安川電機 | ロボットシステム |
| DE102010037903B4 (de) | 2010-09-30 | 2015-01-08 | Elektro-Schweisstechnik-Dresden Gmbh | Verfahren zum Fügen von Fügeteilen |
| AT510886B1 (de) * | 2011-01-10 | 2012-10-15 | Fronius Int Gmbh | Verfahren zum einlernen/prüfen eines bewegungsablaufs eines schweissroboters, schweissroboter und steuerung dazu |
| JP5609938B2 (ja) * | 2012-09-06 | 2014-10-22 | 株式会社安川電機 | シーム溶接ロボット |
| US10220466B2 (en) * | 2013-04-26 | 2019-03-05 | Honda Motor Co., Ltd. | Seam welding method and system |
| KR101316591B1 (ko) * | 2013-05-27 | 2013-10-15 | 이강천 | 직결 구동식 전극휠을 갖는 로봇 심 용접기 |
-
2014
- 2014-04-18 JP JP2014086818A patent/JP6511626B2/ja not_active Expired - Fee Related
-
2015
- 2015-02-04 CN CN201510059539.9A patent/CN105033431B/zh not_active Expired - Fee Related
- 2015-04-17 EP EP15163995.2A patent/EP2957375B8/en not_active Not-in-force
- 2015-04-17 US US14/689,057 patent/US10543560B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6213276A (ja) * | 1985-07-10 | 1987-01-22 | Honda Motor Co Ltd | 自動シ−ム溶接装置における制御方法 |
| WO1996029174A1 (en) * | 1995-03-17 | 1996-09-26 | Kabushiki Kaisha Yaskawa Denki | Seam welding method and apparatus |
| JPH09234566A (ja) * | 1996-02-28 | 1997-09-09 | Stola Spa | 自動車の車体またはその副構体の溶接装置 |
| WO2011034354A2 (ko) * | 2009-09-16 | 2011-03-24 | 주식회사 효성 | 이동식 심용접기 및 그 용접 제어방법 |
| JP2013059772A (ja) * | 2011-09-12 | 2013-04-04 | Honda Motor Co Ltd | シーム溶接システム及びシーム溶接方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105033431A (zh) | 2015-11-11 |
| JP6511626B2 (ja) | 2019-05-15 |
| EP2957375B8 (en) | 2020-10-14 |
| EP2957375B1 (en) | 2020-07-29 |
| CN105033431B (zh) | 2019-03-29 |
| EP2957375A2 (en) | 2015-12-23 |
| EP2957375A3 (en) | 2016-04-20 |
| US20150298244A1 (en) | 2015-10-22 |
| US10543560B2 (en) | 2020-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6511626B2 (ja) | シーム溶接システム、シーム溶接方法および被溶接物の生産方法 | |
| CN107378324B (zh) | 一种基于视觉提取的异型工件的焊接系统及方法 | |
| CN110605463B (zh) | 用于空间圆弧路径埋弧焊接的机器人自动焊接装置 | |
| CN101486123A (zh) | 焊接机器人 | |
| CN106671079A (zh) | 一种实现变位机协同的焊接机器人运动控制方法 | |
| JP6379853B2 (ja) | ロボットの制御装置及び制御方法 | |
| JP2015174185A (ja) | ロボットのシミュレーション装置及び方法、制御装置、及びロボットシステム | |
| JP2006039781A (ja) | アーク溶接用装置 | |
| JP6165322B2 (ja) | ロボット制御装置およびロボット制御方法 | |
| JP2011138275A (ja) | アーク溶接ロボットの制御装置及びプログラム | |
| JP5001817B2 (ja) | ステッチパルス溶接方法 | |
| JP5056241B2 (ja) | ロボットシステム制御装置 | |
| JP2009262306A (ja) | ロボットの教示方法 | |
| US12109692B2 (en) | Method for teaching torch orientation for robotic welding | |
| JP2010240664A (ja) | 溶接ロボット及び溶接におけるウィービング動作の制御方法 | |
| JP6769424B2 (ja) | レーザ加工方法、コントローラおよびロボットシステム | |
| CN207205613U (zh) | 一种基于视觉提取的异型工件的焊接系统 | |
| CN110142533A (zh) | 一种基于机器视觉与ai算法的自动焊接方法及焊接装置 | |
| JP2010089149A (ja) | 溶接ロボットの制御装置および制御方法 | |
| JP2001318715A (ja) | 溶接用ロボットの教示方法及び装置 | |
| JP4842656B2 (ja) | 溶接ロボット制御装置 | |
| JP2008130022A (ja) | 産業用ロボット制御装置 | |
| JP2014065107A (ja) | ロボットの動作プログラム修正装置 | |
| JP5609769B2 (ja) | ロボットシステム | |
| JP6955414B2 (ja) | 溶接ロボットシステム及び溶接ロボットシステムを用いた溶接方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180319 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190205 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20190305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20190305 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6511626 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |