JP2016002122A - 義肢装着式動作補助装置及び装着式動作補助装置 - Google Patents
義肢装着式動作補助装置及び装着式動作補助装置 Download PDFInfo
- Publication number
- JP2016002122A JP2016002122A JP2014122482A JP2014122482A JP2016002122A JP 2016002122 A JP2016002122 A JP 2016002122A JP 2014122482 A JP2014122482 A JP 2014122482A JP 2014122482 A JP2014122482 A JP 2014122482A JP 2016002122 A JP2016002122 A JP 2016002122A
- Authority
- JP
- Japan
- Prior art keywords
- knee joint
- task
- phase
- angle
- leg
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
- A61F2/72—Bioelectric control, e.g. myoelectric
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/60—Artificial legs or feet or parts thereof
- A61F2/64—Knee joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/78—Means for protecting prostheses or for attaching them to the body, e.g. bandages, harnesses, straps, or stockings for the limb stump
- A61F2/80—Sockets, e.g. of suction type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2002/5081—Additional features
- A61F2002/5083—Additional features modular
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/60—Artificial legs or feet or parts thereof
- A61F2002/607—Lower legs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
- A61F2002/701—Operating or control means electrical operated by electrically controlled means, e.g. solenoids or torque motors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
- A61F2002/704—Operating or control means electrical computer-controlled, e.g. robotic control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/76—Means for assembling, fitting or testing prostheses, e.g. for measuring or balancing, e.g. alignment means
- A61F2002/7615—Measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/76—Means for assembling, fitting or testing prostheses, e.g. for measuring or balancing, e.g. alignment means
- A61F2002/7615—Measuring means
- A61F2002/7625—Measuring means for measuring angular position
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/76—Means for assembling, fitting or testing prostheses, e.g. for measuring or balancing, e.g. alignment means
- A61F2002/7615—Measuring means
- A61F2002/7635—Measuring means for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/76—Means for assembling, fitting or testing prostheses, e.g. for measuring or balancing, e.g. alignment means
- A61F2002/7615—Measuring means
- A61F2002/764—Measuring means for measuring acceleration
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Transplantation (AREA)
- Heart & Thoracic Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Vascular Medicine (AREA)
- Cardiology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Manipulator (AREA)
- Prostheses (AREA)
Abstract
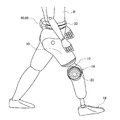
【解決手段】義肢装着式動作補助装置は、義足の大腿フレーム12と下腿フレーム16との間の膝関節14の動作を支援するものであり、前記大腿フレーム及び下腿フレームに連結され、義足に対して動力を付与する駆動部20と、鉛直方向に対する股関節角度を検出する絶対角度センサと、膝関節角度を検出する角度センサと、装着者への床反力を検出する床反力センサと、タスクのフェイズの基準パラメータを格納したデータ格納部と、前記股関節角度、前記膝関節角度、及び前記床反力と、前記データ格納部に格納された基準パラメータとを比較することにより、装着者のタスクのフェイズを推定し、このフェイズに応じた動力を前記駆動部に発生させるための自律指令信号を生成する制御部40と、を備える。
【選択図】図1
Description
図3に人の平地歩行の一連の流れを示す。人の歩行状態は遊脚期と支持脚期の2つに大別される。遊脚期は足が地面から離れ下腿を振り出す動作の期間である。支持脚期は足が地面に接地し自重を支えている期間である。平地歩行タスクは、遊脚フェイズと支持脚フェイズにより構成される。

次に、階段昇り動作でのトルク制御について説明する。本実施形態における階段昇り動作は、一足一段での昇り動作である。図4(a)に一足一段(Step-Over-Step)での階段昇り動作の例を示し、図4(b)に二足一段(Step-By-Step)での階段昇り動作の例を示す。一足一段は、健常者が階段昇降を行う際の一般的な昇降方法であり、一段ずつ交互の脚で昇降する。二足一段は、下肢に障害や損傷のある場合の昇降方法であり、両足を同じ段へ配置した後、片脚で昇降動作を行う。
次に、階段降り動作でのトルク制御について説明する。なお、階段降り動作についても、上述の階段昇り動作と同様に、一足一段での降り動作である。図6に示すように、階段降り動作は、支持脚フェイズ(図6(a))と遊脚フェイズ(図6(b))により構成される。
図7(a)〜(c)は、上述した平地歩行タスクと階段昇りタスクとの間でのタスク切り替え状況の例を示す。図7(a)は、平地歩行タスクから階段昇りタスクへ健足側の脚から昇り始める場合を示す。図7(b)は、階段昇りタスクから平地歩行タスクへ遷移する際に、動作補助装置側(義足側)の脚から歩行を開始する場合を示す。図7(c)は、図7(b)とは逆に、階段昇りタスクから平地歩行タスクへ遷移する際に、健足側の脚から歩行を開始する場合を示す。
タスク毎の試験
動作補助装置のソケット10を模擬大腿ソケットとし、健常者による試験を行った。被験者は動作補助装置を装着していない状態と装着した状態で、平地歩行動作、階段昇り動作、階段降り動作のそれぞれについて試験を行った。被験者は動作補助装置を装着していない状態では快適速度(Comfortable speed)で歩行し、装着した状態では快適速度と最大努力速度(Maximum
speed)で歩行した。これら3つの条件のもとで以下に説明する試験をそれぞれ5回試行し比較した。本試験の階段昇降では、蹴上げ高さが180mm、幅1400mm、奥行き280mm、14
段の階段を使用した。
平地歩行動作試験では、10m歩行試験を行った。被験者は図9に示す経路のA地点からD地点までを歩行し、B地点からC地点までの10mの歩行に要する時間を計測した。A地点からB地点、C地点からD地点はどちらも3mの助走区間とした。
階段昇り動作試験では、1段目から11段目までの計10段の段差を昇るのに要する時間を計測した。
階段降り動作試験では、12段目から2段目までの計10段の段差を降りるのに要する時間を計測した。
図13に示す平地歩行動作と階段昇降動作が必要な経路を、動作補助装置を装着した健常1名が歩行し、状況に応じたタスクの切り替えを確認した。使用する階段は5段と3段の段差がそれぞれ両側にあり、5段側の蹴上寸法は120mm、3段側の蹴上寸法は200mmである。図13のA地点から歩行し、B−C区間の階段を昇り、C−D区間の階段を降り、E地点まで歩行する。その後、A地点まで同じ経路を引き返す。
下肢切断者1名の協力のもと試験を実施した。試験協力者は交通事故により右大腿と左下腿をそれぞれ切断している50代の男性である。右脚側の膝関節屈曲伸展に必要な筋群の一部が残存しており、随意的に力を入れることができる。試験では、右脚側に動作補助装置を装着し、左脚側には市販されている下腿義足を装着した。義足使用歴は10年であり、平時はインテリジェント義足を使用して、大腿義足の膝関節を屈曲伸展させて平地歩行することができる。
動作補助装置の制御に必要な右脚側膝関節の生体電位信号を計測した。試験協力者へ膝関節を屈曲伸展するように力を入れるよう指示し、その際に膨張した筋肉の皮膚表面に生体電位計測用の電極を貼り付けた。動作補助装置によって生体電位の計測を行うと同時に、試験協力者へのフィードバックとして以下の数式(5)に基づく随意制御を行った。
下肢切断者が動作補助装置を使用した場合の平地歩行を試験した。本試験では、上述した健常者による試験と同様に、10m歩行試験を行った。図9に示す経路のA地点からD地点までを歩行し、B地点からC地点までの10の歩行に要する時間を計測した。A地点からB地点、C地点からD地点はどちらも3mの助走区間とした。
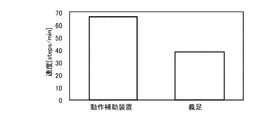
下肢切断者が動作補助装置を使用した場合の階段昇降を試験した。本試験では、上述した健常者による試験と同じ階段を使用した。階段昇り動作試験では、1段目から11段目までの計10段の段差を昇るのに要する時間を計測した。階段降り動作試験では、12段目から2段目までの計10段の段差を降りるのに要する時間を計測した。片側の手すりは使用可能とした。比較のために、動作補助装置と普段使っている義足の両方で昇降動作時の所要時間の計測を行った。試験協力者にはどちらも快適速度での歩行を指示した。普段使っている義足での試験では、平時での昇降方法が二足一段昇降であるため、二足一段昇降で階段を昇降した。
図13に示す平地歩行動作と階段昇降動作が必要な経路を、動作補助装置を装着した下肢切断者が歩行し、状況に応じたタスクの切り替えを確認した。使用する階段は5段と3段の段差がそれぞれ両側にあり、5段側の蹴上寸法は120mm、3段側の蹴上寸法は200mmである。図13のA地点から歩行し、B−C区間の階段を昇り、C−D区間の階段を降り、E地点まで歩行する。その後、A地点まで同じ経路を引き返す。
日常生活における屋内での使用を想定し、実際の建造物内における平地歩行動作と階段昇降動作の必要な経路を歩行可能か否か確認した。建造物内の模式図を図23に示す。歩行する経路は、A地点から歩行を開始し、Walk1、Ascend、Walk2、Descend、Walk3の順に建造物内を巡回し、A地点へ再び戻ってくるまでの時間を計測した。比較のために、動作補助装置を使用した場合と、普段使っている義足を使用した場合の両方でこの経路を歩行した。普段使っている義足での試験では、平時での昇降方法が二足一段昇降であるため、二足一段昇降で階段を昇降した。
12 大腿フレーム
14 膝関節部
16 下腿フレーム
18 足部
20 駆動部
30 腰ベルト
40 制御部
50 バッテリ
102 生体電位信号検出手段
104 関節角度検出手段
106 床反力検出手段
110 制御装置
120 駆動信号生成手段
Claims (14)
- 義足の大腿フレームと下腿フレームとの間の膝関節の動作を支援する義肢装着式動作補助装置であって、
前記膝関節の外側に配置され、前記大腿フレーム及び前記下腿フレームに連結され、前記義足に対して動力を付与する駆動部と、
鉛直方向に対する股関節角度を検出する絶対角度センサと、
前記駆動部に設けられ、膝関節角度を検出する角度センサと、
装着者への床反力を検出する床反力センサと、
タスクとして分類した装着者の動作パターンを構成する一連の最小動作単位(フェーズ)の各々の基準パラメータを格納したデータ格納部と、
前記股関節角度、前記膝関節角度、及び前記床反力と、前記データ格納部に格納された基準パラメータとを比較することにより、前記装着者のタスクのフェイズを推定し、このフェイズに応じた動力を前記駆動部に発生させるための自律指令信号を生成する制御部と、
を備える義肢装着式動作補助装置。 - 前記制御部は、階段昇りタスクの屈曲フェイズにおいて、前記義足のつま先が所定の高さの段差を超えられるように、前記大腿フレーム及び前記下腿フレームの長さから逆運動学を用いて膝関節目標角度を算出し、該膝関節目標角度と前記角度センサにより検出される膝関節角度との偏差に基づいて前記自律指令信号を生成することを特徴とする請求項1に記載の義肢装着式動作補助装置。
- 前記制御部は、階段昇りタスクの足裏水平フェイズにおいて、前記股関節角度を用いて足裏が水平になる膝関節目標角度を算出し、該膝関節目標角度と前記角度センサにより検出される膝関節角度との偏差に基づいて前記自律指令信号を生成することを特徴とする請求項1又は2に記載の義肢装着式動作補助装置。
- 前記制御部は、前記角度センサにより検出される膝関節角度が前記膝関節目標角度に達すると、屈曲フェイズから足裏水平フェイズに遷移することを特徴とする請求項2に記載の義肢装着式動作補助装置。
- 前記制御部は、階段降りタスク又は平地歩行タスクの支持脚フェイズにおいて、完全伸展角度と前記角度センサにより検出される膝関節角度との偏差にゲインを掛け合わせた値を用いて前記自律指令信号を生成し、
屈曲時のゲインは、伸展時のゲインよりも大きいことを特徴とする請求項1乃至4のいずれかに記載の義肢装着式動作補助装置。 - 前記制御部は、平地歩行タスクの遊脚フェイズにおいて、前記股関節角度から股関節角速度を算出し、所定時間前の股関節角速度にゲインを掛け合わせた値を用いて前記自律指令信号を生成することを特徴とする請求項1乃至5のいずれかに記載の義肢装着式動作補助装置。
- 前記制御部は、前記股関節角度、前記膝関節角度、及び前記床反力に基づいて、平地歩行タスクと階段昇りタスクの切り替えを行うことを特徴とする請求項1乃至6のいずれかに記載の義肢装着式動作補助装置。
- 前記制御部は、健足側床反力、義足側床反力、前記絶対角度センサから得られる鉛直方向加速度、及び前記股関節角度に基づいて、平地歩行タスクから階段昇りタスクへの切り替えを行うことを特徴とする請求項7に記載の義肢装着式動作補助装置。
- 前記制御部は、健足側床反力が所定値以上となり、前記膝関節が屈曲方向に運動している場合、階段昇りタスクから平地歩行タスクへの切り替えを行うことを特徴とする請求項7又は8に記載の義肢装着式動作補助装置。
- 前記制御部は、義足側床反力が所定値以上となり、前記膝関節が伸展方向に運動している場合、階段昇りタスクから平地歩行タスクへの切り替えを行うことを特徴とする請求項7乃至9のいずれかに記載の義肢装着式動作補助装置。
- 前記装着者の大腿部における生体信号を検出する生体信号センサをさらに備え、
前記制御部は、階段昇りタスクにおいて、該生体信号センサにより検出される伸展側の生体信号の強度が所定値以上となった場合に、屈曲フェイズから足裏水平フェイズに遷移することを特徴とする請求項1乃至10のいずれかに記載の義肢装着式動作補助装置。 - 前記制御部は、前記生体信号に応じた動力を前記駆動部に発生させるための随意指令信号を生成し、前記随意指令信号及び前記自律指令信号を合成して合成指令信号を生成し、
前記駆動部は、前記合成指令信号に基づいて生成された駆動電流により駆動することを特徴とする請求項11に記載の義肢装着式動作補助装置。 - 前記データ格納部は、各タスクのフェイズ毎に設定された前記随意指令信号と前記自律指令信号との合成比を格納し、
前記制御部は、推定したフェイズに応じた合成比となるように、前記随意指令信号と前記自律指令信号とを合成して合成指令信号を生成することを特徴とする請求項12に記載の義肢装着式動作補助装置。 - 一端が装着者の大腿部に装着されるソケットに連結される大腿フレームと、
一側が前記大腿フレームに結合される膝関節部と、
一端が前記膝関節部の他側に結合される下腿フレームと、
前記下腿フレームの他端に結合される足部と、
前記膝関節部に設けられ、駆動力の発生により前記大腿フレーム又は前記下腿フレームを回動させる駆動部、及び膝関節角度を検出する角度センサと、
前記大腿フレームに設けられ、鉛直方向に対する股関節角度を検出する絶対角度センサと、
前記足部に設けられ、装着者への床反力を検出する床反力センサと、
タスクとして分類した装着者の動作パターンを構成する一連の最小動作単位(フェーズ)の各々の基準パラメータを格納したデータ格納部と、
前記股関節角度、前記膝関節角度、及び前記床反力と、前記データ格納部に格納された基準パラメータとを比較することにより、前記装着者のタスクのフェイズを推定し、このフェイズに応じた動力を前記駆動部に発生させるための自律指令信号を生成する制御部と、
を備える装着式動作補助装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122482A JP6414664B2 (ja) | 2014-06-13 | 2014-06-13 | 義肢装着式動作補助装置 |
| US15/318,257 US20170119550A1 (en) | 2014-06-13 | 2015-06-12 | Prosthesis-mounted action-assist device and wearable action-assist device |
| EP15807079.7A EP3156010A4 (en) | 2014-06-13 | 2015-06-12 | Worn-prosthetic-limb movement assistance device and worn movement assistance device |
| PCT/JP2015/067034 WO2015190598A1 (ja) | 2014-06-13 | 2015-06-12 | 義肢装着式動作補助装置及び装着式動作補助装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122482A JP6414664B2 (ja) | 2014-06-13 | 2014-06-13 | 義肢装着式動作補助装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016002122A true JP2016002122A (ja) | 2016-01-12 |
| JP6414664B2 JP6414664B2 (ja) | 2018-10-31 |
Family
ID=54833681
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014122482A Active JP6414664B2 (ja) | 2014-06-13 | 2014-06-13 | 義肢装着式動作補助装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20170119550A1 (ja) |
| EP (1) | EP3156010A4 (ja) |
| JP (1) | JP6414664B2 (ja) |
| WO (1) | WO2015190598A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018092325A1 (ja) | 2016-11-18 | 2018-05-24 | Cyberdyne株式会社 | 義足動作補助装置及び義足動作補助方法 |
| WO2020116707A1 (ko) * | 2018-12-06 | 2020-06-11 | 한국산업기술대학교산학협력단 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
| JP2022534686A (ja) * | 2019-06-05 | 2022-08-03 | オットー・ボック・ヘルスケア・プロダクツ・ゲーエムベーハー | 人工膝関節を制御する方法 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9180025B2 (en) * | 2008-04-21 | 2015-11-10 | Vanderbilt University | Powered leg prosthesis and control methodologies for obtaining near normal gait |
| CN106109062B (zh) * | 2016-06-14 | 2017-10-13 | 太原理工大学 | 一种基于生物力学的个性化人工膝关节制备方法 |
| WO2018236208A1 (en) * | 2017-06-22 | 2018-12-27 | Universiti Malaya | A prosthetic limb integrated with a sensory system |
| CA3072504A1 (en) * | 2017-08-29 | 2019-03-07 | Roam Robotics Inc. | Exoskeleton fit evaluation system and method |
| JP6925231B2 (ja) | 2017-10-23 | 2021-08-25 | サンコール株式会社 | 歩行動作補助装置 |
| JP7111463B2 (ja) * | 2017-12-15 | 2022-08-02 | サンコール株式会社 | 歩行動作補助装置 |
| WO2020245400A1 (de) * | 2019-06-05 | 2020-12-10 | Otto Bock Healthcare Products Gmbh | Verfahren zum betreiben einer orthopädietechnischen einrichtung und entsprechende einrichtung |
| DE102019118399A1 (de) * | 2019-07-08 | 2021-01-14 | Georg-August-Universität Göttingen Stiftung Öffentlichen Rechts, Universitätsmedizin | Verfahren und Systeme zum Steuern aktiver Prothesen |
| JP7374014B2 (ja) * | 2020-02-20 | 2023-11-06 | Cyberdyne株式会社 | 装着式動作補助装置 |
| CN111658246B (zh) * | 2020-05-19 | 2021-11-30 | 中国科学院计算技术研究所 | 一种基于对称性的智能关节假肢调控方法及系统 |
| CN111803250A (zh) * | 2020-07-03 | 2020-10-23 | 北京联合大学 | 基于肌电信号和角度信号的膝关节角度预测方法及系统 |
| WO2022087161A1 (en) * | 2020-10-20 | 2022-04-28 | University Of Utah Research Foundation | Powered knee and ankle joint system with adaptive control |
| CN113977582B (zh) * | 2021-11-12 | 2023-04-11 | 杭州电子科技大学 | 一种基于dmp的下肢外骨骼上楼梯控制方法 |
| CN116421372B (zh) * | 2023-03-09 | 2025-01-14 | 南方科技大学 | 控制假肢的方法、假肢和计算机可读存储介质 |
| CN117426914B (zh) * | 2023-12-21 | 2024-03-12 | 深圳市心流科技有限公司 | 假腿模式切换控制方法、控制装置及智能假腿 |
| CN118615076B (zh) * | 2024-08-15 | 2025-02-11 | 浙江强脑科技有限公司 | 假腿上楼梯控制方法、装置和存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009060946A (ja) * | 2007-09-04 | 2009-03-26 | Univ Of Tsukuba | 装着式動作補助装置及びその制御方法及びプログラム |
| JP2010017390A (ja) * | 2008-07-11 | 2010-01-28 | Univ Of Tsukuba | 装着式動作補助装置、基準パラメータデータベース構築装置、装着式動作補助装置における駆動制御方法、基準パラメータデータベース構築方法、及びそのプログラム |
| JP2012135486A (ja) * | 2010-12-27 | 2012-07-19 | Cyberdyne Inc | 装着式動作補助装置、そのインタフェース装置及びプログラム |
| JP2013510603A (ja) * | 2009-11-13 | 2013-03-28 | オットー・ボック・ヘルスケア・プロダクツ・ゲーエムベーハー | 矯正用または補装用の人工の関節を制御するための方法および装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4130739B2 (ja) * | 2002-01-28 | 2008-08-06 | 本田技研工業株式会社 | 二足歩行移動体の床反力推定方法 |
| WO2005087144A2 (en) * | 2004-03-10 | 2005-09-22 | össur hf | Control system and method for a prosthetic knee |
| CN102065799B (zh) * | 2008-06-16 | 2015-03-04 | 伯克利仿生技术公司 | 半驱动式大腿假肢膝关节 |
| US8096965B2 (en) * | 2008-10-13 | 2012-01-17 | Argo Medical Technologies Ltd. | Locomotion assisting device and method |
| KR20110082394A (ko) * | 2010-01-11 | 2011-07-19 | 삼성전자주식회사 | 보행 로봇 및 그 제어 방법 |
| EP2621414B1 (en) * | 2010-09-29 | 2019-03-13 | Össur HF | Prosthetic and orthotic devices and methods and systems for controlling the same |
| US9044346B2 (en) * | 2012-03-29 | 2015-06-02 | össur hf | Powered prosthetic hip joint |
-
2014
- 2014-06-13 JP JP2014122482A patent/JP6414664B2/ja active Active
-
2015
- 2015-06-12 US US15/318,257 patent/US20170119550A1/en not_active Abandoned
- 2015-06-12 WO PCT/JP2015/067034 patent/WO2015190598A1/ja not_active Ceased
- 2015-06-12 EP EP15807079.7A patent/EP3156010A4/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009060946A (ja) * | 2007-09-04 | 2009-03-26 | Univ Of Tsukuba | 装着式動作補助装置及びその制御方法及びプログラム |
| JP2010017390A (ja) * | 2008-07-11 | 2010-01-28 | Univ Of Tsukuba | 装着式動作補助装置、基準パラメータデータベース構築装置、装着式動作補助装置における駆動制御方法、基準パラメータデータベース構築方法、及びそのプログラム |
| JP2013510603A (ja) * | 2009-11-13 | 2013-03-28 | オットー・ボック・ヘルスケア・プロダクツ・ゲーエムベーハー | 矯正用または補装用の人工の関節を制御するための方法および装置 |
| JP2012135486A (ja) * | 2010-12-27 | 2012-07-19 | Cyberdyne Inc | 装着式動作補助装置、そのインタフェース装置及びプログラム |
Non-Patent Citations (2)
| Title |
|---|
| KENTA SUZUKI ET AL.: "Intention-based walking support for paraplegia patients with Robot Suit HAL", ADVANCED ROBOTICS, vol. 21, no. 12, JPN6015029335, 2007, pages 1441 - 1469, ISSN: 0003741393 * |
| TAKUMI TAKETOMI ET AL.: "Stair Ascent assistance for Cerebral Palsy with Robot Suit HAL", SYSTEM INTEGRATION (SII), 2012 IEEE/SICE INTERNATIONAL SYMPOSIUM ON, JPN6015029331, 2012, pages 331 - 336, ISSN: 0003741392 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018092325A1 (ja) | 2016-11-18 | 2018-05-24 | Cyberdyne株式会社 | 義足動作補助装置及び義足動作補助方法 |
| JPWO2018092325A1 (ja) * | 2016-11-18 | 2019-10-10 | Cyberdyne株式会社 | 義足動作補助装置及び義足動作補助方法 |
| US11103369B2 (en) | 2016-11-18 | 2021-08-31 | Cyberdyne Inc. | Artificial leg motion assisting apparatus and artificial leg motion assisting method |
| WO2020116707A1 (ko) * | 2018-12-06 | 2020-06-11 | 한국산업기술대학교산학협력단 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
| JP2022534686A (ja) * | 2019-06-05 | 2022-08-03 | オットー・ボック・ヘルスケア・プロダクツ・ゲーエムベーハー | 人工膝関節を制御する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3156010A4 (en) | 2018-07-11 |
| US20170119550A1 (en) | 2017-05-04 |
| EP3156010A1 (en) | 2017-04-19 |
| WO2015190598A1 (ja) | 2015-12-17 |
| JP6414664B2 (ja) | 2018-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6414664B2 (ja) | 義肢装着式動作補助装置 | |
| US10290235B2 (en) | Rehabilitation using a prosthetic device | |
| Huang et al. | Locomotor adaptation by transtibial amputees walking with an experimental powered prosthesis under continuous myoelectric control | |
| Bae et al. | A soft exosuit for patients with stroke: Feasibility study with a mobile off-board actuation unit | |
| JP5189911B2 (ja) | 装着式動作補助装置、基準パラメータデータベース構築装置、装着式動作補助装置における駆動制御方法、基準パラメータデータベース構築方法、及びそのプログラム | |
| Shultz et al. | Running with a powered knee and ankle prosthesis | |
| Tsukahara et al. | Gait support for complete spinal cord injury patient by synchronized leg-swing with HAL | |
| EP3840714B1 (en) | Bio-inspired adaptive impedance based controller for human-robot interaction | |
| Kagawa et al. | Optimization-based motion planning in joint space for walking assistance with wearable robot | |
| JPWO2012118143A1 (ja) | 歩行訓練装置及び歩行訓練システム | |
| US10799373B2 (en) | Stance controller and related methods | |
| WO2018092325A1 (ja) | 義足動作補助装置及び義足動作補助方法 | |
| US20140148738A1 (en) | Exercise support apparatus and exercise support method | |
| JP2015177863A (ja) | アシスト制御装置および方法 | |
| Lenzi et al. | Minimum jerk swing control allows variable cadence in powered transfemoral prostheses | |
| JP2012125388A (ja) | 歩行リハビリ装置 | |
| Brantley et al. | Prediction of lower-limb joint kinematics from surface EMG during overground locomotion | |
| Kagawa et al. | Gait pattern generation for a power-assist device of paraplegic gait | |
| JP2005013442A (ja) | 歩行訓練装置及び歩行訓練装置の制御方法 | |
| Kang et al. | A novel assist-as-needed control method to guide pelvic trajectory for gait rehabilitation | |
| JP2013048701A (ja) | 歩行支援装置、及び歩行支援プログラム | |
| Novandy et al. | Interaction control of a programmable footpad-type gait rehabilitation robot for active walking on various terrains | |
| JP2019005250A (ja) | ロボティックウエア及びその制御方法 | |
| Zhong et al. | Motion adaption and trajectory generation of stair ascent and descent with a lower limb exoskeleton for paraplegics | |
| Cao et al. | A sit-to-stand trainer system in lower limb rehabilitation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170704 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180405 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20180409 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180918 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180919 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6414664 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |