JP2016002604A - チャック装置 - Google Patents
チャック装置 Download PDFInfo
- Publication number
- JP2016002604A JP2016002604A JP2014122263A JP2014122263A JP2016002604A JP 2016002604 A JP2016002604 A JP 2016002604A JP 2014122263 A JP2014122263 A JP 2014122263A JP 2014122263 A JP2014122263 A JP 2014122263A JP 2016002604 A JP2016002604 A JP 2016002604A
- Authority
- JP
- Japan
- Prior art keywords
- opening
- claw member
- air passage
- clamping
- chuck device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
【課題】チャック装置における減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことを課題とする。
【解決手段】チャック装置は、対象物を挟持する第1の挟持部を備えるとともに、一端が前記第1の挟持部の挟持面に開口する第1の開口であり、他端が減圧装置側の開口となる第2の開口である第1の空気通路が形成された第1の爪部材と、
前記第1の挟持部と共働して対象物を挟持する第2の挟持部を備えるとともに、前記第1の爪部材と対向配置された第2の爪部材と、前記第1の挟持部と前記第2の挟持部とを開閉させる開閉駆動部と、前記開閉駆動部により前記第1の挟持部と前記第2の挟持部とを閉じる際に前記第1の空気通路内を減圧状態とするとともに、前記第1の挟持部と前記第2の挟持部とを開く際に前記第1の空気通路を開放して減圧状態を解消する減圧調整部とを備える。
【選択図】図7
【解決手段】チャック装置は、対象物を挟持する第1の挟持部を備えるとともに、一端が前記第1の挟持部の挟持面に開口する第1の開口であり、他端が減圧装置側の開口となる第2の開口である第1の空気通路が形成された第1の爪部材と、
前記第1の挟持部と共働して対象物を挟持する第2の挟持部を備えるとともに、前記第1の爪部材と対向配置された第2の爪部材と、前記第1の挟持部と前記第2の挟持部とを開閉させる開閉駆動部と、前記開閉駆動部により前記第1の挟持部と前記第2の挟持部とを閉じる際に前記第1の空気通路内を減圧状態とするとともに、前記第1の挟持部と前記第2の挟持部とを開く際に前記第1の空気通路を開放して減圧状態を解消する減圧調整部とを備える。
【選択図】図7
Description
本発明は、チャック装置に関する。
従来、各種製品の組み立てに用いられる種々の産業用ロボットが提案されており、対象物を把持する把持装置も知られている(例えば、特許文献1)。ところで、各種製品の組み立て工程では、例えば、シールやフィルム等、薄いシート状で柔軟性に富んだ部品を把持することもある。このようなシート状の部品は挟む位置が安定せず、また、表面が滑りやすい材質であることが多い。このため、対象物を挟持しただけでは対象物がずれることがあり、対象物を挟持する形式の把持装置では、対象物の安定した把持が困難であった。これに対し、対象物の挟持とともに真空吸着を利用する提案が知られている(例えば、特許文献2)。真空吸着を利用することにより、対象物のずれが抑制され、対象物の安定した把持状態が期待される。
しかしながら、前記特許文献2に開示された提案のように、対象物の挟持と併せて真空吸着する場合、真空状態を解除するタイミングと、対象物の挟持を解除するタイミングとが適切でないと、挟持した対象物を適切に開放することができない可能性がある。これを解消するためには、挟持動作と吸着動作(減圧動作)をそれぞれ行うためのシーケンス制御が別途必要になる等、装置が複雑になる。
1つの側面では、本明細書開示のチャック装置は、減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことを課題とする。
本明細書開示のチャック装置は、対象物を挟持する第1の挟持部を備えるとともに、一端が前記第1の挟持部の挟持面に開口する第1の開口であり、他端が減圧装置側の開口となる第2の開口である第1の空気通路が形成された第1の爪部材と、前記第1の挟持部と共働して対象物を挟持する第2の挟持部を備えるとともに、前記第1の爪部材と対向配置された第2の爪部材と、前記第1の挟持部と前記第2の挟持部とを開閉させる開閉駆動部と、前記開閉駆動部により前記第1の挟持部と前記第2の挟持部とを閉じる際に前記第1の空気通路内を減圧状態とするとともに、前記第1の挟持部と前記第2の挟持部とを開く際に前記第1の空気通路を開放して減圧状態を解消する減圧調整部と、を備える。
本明細書開示のチャック装置によれば、減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことができる。
以下、本発明の実施形態について、添付図面を参照しつつ説明する。ただし、図面中、各部の寸法、比率等は、実際のものと完全に一致するようには図示されていない場合がある。また、図面によっては、説明の都合上、実際には存在する構成要素が省略されていたり、寸法が実際よりも誇張されて描かれていたりする場合がある。
(第1実施形態)
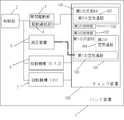
まず、図1を参照しつつ、第1実施形態のチャック装置100を備えたハンド装置1の概略構成について説明する。図1は第1実施形態のチャック装置を備えたハンド装置のブロック図の一例である。チャック装置100は、種々の物品、例えば、電子部品であるフレキシブルプリント基板(FPB)等を挟持する対象物50とすることができる。本実施形態のチャック装置100は、フィルム状や、シート状の対象物50に対して適用することができる。ハンド装置1は、制御部2を備える。制御部2には、開閉駆動部3、減圧装置5、移動機構6及び回転機構7が電気的に接続されている。開閉駆動部3は、後に詳述するようにチャック装置100の開閉動作を行う。開閉駆動部3には、駆動連結部4が含まれる。駆動連結部については、後に説明する。減圧装置5は、ハンド装置1により挟持する対象物を吸着するものである。減圧装置5を作動させることにより、減圧装置5の接続先の状態を真空状態に近づけることができる。これにより、対象物50を吸着することができる。移動機構6は、チャック装置100をX方向、Y方向及びZ方向に移動させる。回転機構7は、チャック装置100をZ軸回り(θz)に回転させることができる。なお、回転機構7は、X軸回り(θx)やY軸回り(θy)に回転させる機能を備えていてもよい。
まず、図1を参照しつつ、第1実施形態のチャック装置100を備えたハンド装置1の概略構成について説明する。図1は第1実施形態のチャック装置を備えたハンド装置のブロック図の一例である。チャック装置100は、種々の物品、例えば、電子部品であるフレキシブルプリント基板(FPB)等を挟持する対象物50とすることができる。本実施形態のチャック装置100は、フィルム状や、シート状の対象物50に対して適用することができる。ハンド装置1は、制御部2を備える。制御部2には、開閉駆動部3、減圧装置5、移動機構6及び回転機構7が電気的に接続されている。開閉駆動部3は、後に詳述するようにチャック装置100の開閉動作を行う。開閉駆動部3には、駆動連結部4が含まれる。駆動連結部については、後に説明する。減圧装置5は、ハンド装置1により挟持する対象物を吸着するものである。減圧装置5を作動させることにより、減圧装置5の接続先の状態を真空状態に近づけることができる。これにより、対象物50を吸着することができる。移動機構6は、チャック装置100をX方向、Y方向及びZ方向に移動させる。回転機構7は、チャック装置100をZ軸回り(θz)に回転させることができる。なお、回転機構7は、X軸回り(θx)やY軸回り(θy)に回転させる機能を備えていてもよい。
チャック装置100は、第1の挟持部102を有する第1の爪部材101と、第2の挟持部106を有する第2の爪部材105を備える。第1の爪部材101には、第1の空気通路103と第2の空気通路104が形成されている。第二の爪部材105には、第3の空気通路107が形成されている。以下、第1の爪部材101及び第2の爪部材105について、図2乃至図4を参照しつつ説明する。図2はチャック装置100の概略構成を示した説明図である。図3は駆動連結部4を取り外した状態の説明図である。図4は駆動連結部4を示す説明図である。
第1の爪部材101は、対象物50を挟持する第1の挟持部102を備える。第1の挟持部102は、第2の爪部材105が備える第2の挟持部106と共働して対象物50を挟持する。第1の爪部材101の内部には、第1の空気通路103が形成されている。第1の空気通路103の一端である第1の開口103aは、第1の挟持部102の挟持面102aに開口している。第1の空気通路103の他端は減圧装置5側の開口である第2の開口103bとなる。第2の開口103bは、第1の爪部材101の後端面101bに開口している。第1の爪部材101には、第1の挟持部102側が低くなった段差部101aが形成されている。この段差部101aの上面は、第2の爪部材105の当接面105aが当接する当接面101a1となる。
第2の爪部材105は、第1の挟持部102と共働して対象物50を挟持する第2の挟持部106を備える。第2の爪部材105は、第1の挟持部102と第2の挟持部106とが向き合うように対向配置されている。第2の爪部材105の第1の爪部材101との対向面は、平滑であり、この対向面の後端側に位置する部分が第1の爪部材101が備える当接面101a1との当接面105aとなっている。第2の挟持部106は、第2の爪部材105の先端側に位置しており、第2の爪部材105の後端側の材質と比較して柔軟性を有する素材で形成されている。具体的に、第2の挟持部106は、シリコンゴム製とされている。これにより、第2の挟持部106は、容易に弾性変形することができる。なお、本実施形態では、第2の挟持部106を、柔軟性を有する素材で形成しているが、第1の挟持部102と第2の挟持部106の少なくとも一方が、柔軟性を有する素材により成形されていることが望ましい。
第1の爪部材101の内部には、第2の空気通路104が形成されている。第2の空気通路104は、第1の空気通路103から分岐している。第2の空気通路104は、第1の挟持部102と第2の挟持部106とが閉じた際に第2の爪部材105が当接する当接面101a1に開口する第3の開口104aを備えている。
また、第2の爪部材105の内部には、第3の空気通路107が形成されている。第3の空気通路107の一端は、第2の挟持部106の挟持面106aに開口する第4の開口107aである。また、第3の空気通路107の他端は、第1の挟持部102と第2の挟持部106とが閉じた際に第1の爪部材101が当接する当接面105aに開口し、第3の開口104aと接続可能に設けられた第5の開口107bである。
第3の開口104aを備えた第2の空気通路104、第4の開口107a及び第5の開口107bを備えた第3の空気通路107は、減圧調整部として機能する。すなわち、第2の空気通路104及び第3の空気通路107は、第1の挟持部102と第2の挟持部106とが閉じ、対象物50を挟持した状態となると、第1の空気通路103とともに減圧装置5に通じる閉じた経路を形成する。一方、第1の挟持部102と第2の挟持部106とが離れると、減圧状態が保たれていた回路が破壊されることになり、減圧状態が解除される。
対象物50を減圧動作及び挟持動作により、適切に把持及び解放する場合、減圧動作及び挟持動作を実行するタイミングが重要となる。具体的に、対象物50を把持するときは、第1の挟持部102と第2の挟持部106との挟持動作が完了した後に吸着する為の減圧動作が作用するようにする。一方、対処物50を開放するときは、減圧動作による吸着を解除した後に挟持動作を終了する。本実施形態のチャック装置100は、装置の機械的な動作に伴って、上記のようなタイミングで各動作が実施されるようになっている。
上述のように、減圧動作及び挟持動作のタイミングはわずかにずれることが求められる。そこで、本実施形態のチャック装置100は、駆動連結部4を用いて第2の爪部材105の開閉動作を行うことにより、このタイミングのずれを創出している。図2、図4を参照すると、駆動連結部4は、第2の爪部材105を覆うように形成されたフレーム4aとこのフレーム4aに設けられた接続部4a1を備える。接続部4a1は、開閉駆動部3に接続されており、フレーム4a、ひいては、第2の爪部材105を昇降させる。フレーム4には、回転支持部4bとスライダ部4cが設けられている。回転支持部4bとスライダ部4cは、いずれも棒状の部材である。図3を参照すると、第2の爪部材105には、軸部105bが形成されている。軸部105bは、貫通孔であり、この軸部105bには、駆動連結部4が備える回転支持部4bが挿通される。第2の爪部材105には、軸部105bよりも先端側に設けられ、先端側に向かうに従って下り傾斜となったガイド部105cが形成されている。ガイド部105cには、スライダ部4cが係合する。このような駆動連結部4を備えることにより、第2の爪部材105を移動させるときに、回転動作と直線動作が実現される。回転動作は、第2の挟持部106を支点として行われる。これにより、第1の挟持部102と第2の挟持部106による挟持動作を継続しつつ、第3の開口104aと第5の開口107bとの接続を解除することにより減圧状態を破壊し、減圧動作を終了させることができる。
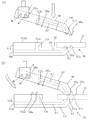
つぎに、図5乃至図7を参照しつつ、チャック装置100の動作につき説明する。図5(A)は第2の挟持部が対象物に接近する状態を示す説明図である。図5(B)は第2の挟持部が対象物に接触した状態を示す説明図である。図6はチャック装置100がチャッキングした状態を示す説明図である。図7はチャック装置100の動作の一例を示すタームチャートである。なお、チャック装置100は、移動機構6により把持する対象物50の位置まで移動する。
対象物を把持するとき、制御部2は、まずタイムチャートにおける(a)のタイミングでチャック動作信号として閉信号を送る。これにより、図5(A)で示すように、駆動連結部4を介して第2の爪部材105が下降する。このとき、第2の爪部材105は、回転支持部4bによって回転し、スライダ部4cが、ガイド部105cの上端縁に接触した状態となっている。これにより、第2の爪部材105は、先端側である第2の挟持部106が下がって状態となっている。なお、減圧装置5は動作を継続している。しかしながら、減圧装置5が接続された第1の空気通路103は、第1の空気通路103から分岐した第2の空気通路104が第3の開口104aで開放された状態となっているため、いずれの箇所においても吸着作用は発揮されていない状態となっている。この状態で駆動連結部4が下降すると、(b)のタイミングで第2の挟持部106が対象物50に接触する。これにより、図5(B)に示すように第1の挟持部102と第2の挟持部106とによる挟持動作が開始される。このタイミングでは、上述のように減圧作用が効いていないため、対象物が空気の動きによって吹き飛ばされてしまうことはない。
挟持動作が開始された後も駆動連結部4の下降が継続されると、第2の爪部材105の後端側が図中、反時計回りに回転する。これは、スライダ部4cがガイド部105cに沿って相対的に移動することができることから、第2の爪部材105の軸部105bを回転軸とした回転が許容されるためである。これにより、第2の爪部材105は恰も第2の挟持部106を支点とした回転動作を行い第3の開口104aと第5の開口107bとが接近する。このとき、第2の挟持部106は、柔軟なシリコンゴム製であることから、対象物50に押し付けられることにより、容易に変形する。この結果、第4の開口107aの周囲が密閉された状態となる。駆動連結部4の下降が継続されると、(c)で示すタイミングで、図6に示すように第3の開口104aと第5の開口107bとが接続された状態となる。これにより、第1の空気通路103、第2の空気通路104及び第3の空気通路107が閉じた回路を形成する。この結果、これらの空気通路が減圧状態となり、対象物50は、第1の開口103a及び第4の開口107aによって吸着される。
このように、挟持動作後に、減圧動作を実行することにより、挟持した対象物50の滑りを抑制することができる。
把持した対象物50を開放するときは、これと逆の動作を辿ることとなる。すなわち、図7中、(d)のタイミングでチャック動作信号として開信号が送られると、駆動連結部4が上昇を開始する。これにより、第2の爪部材105は、軸部105bを支点として回転し、後端側が持ち上げられた状態となる。この結果、図7中、(e)のタイミングで第3の開口104aと第5の開口107bとが離れ、減圧状態が破壊される。そして、駆動連結部4がさらに上昇すると、スライダ部がガイド部105cの上端縁に接触するため、第2の爪部材105の回転が停止し、以後は、その姿勢を維持したまま第2の爪部材105が引き上げられる。この結果、(f)のタイミングで第1の挟持部102と第2の挟持部106による挟持動作が終了する。
このように、挟持動作を終了するときに、減圧動作はすでに終了した状態となっているので、対象物を減圧作用による空気の動きにより吹き飛ばしてしまうことがない。
このように、本実施形態のチャック装置100によれば、減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことができる。
(第2実施形態)
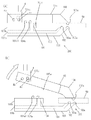
つぎに、図8を参照しつつ、第2実施形態のチャック装置200について説明する。図8(A)は第2実施形態のチャック装置200がチャッキングした状態を示す説明図であり、図8(B)は第2実施形態のチャック装置200の減圧状態が破壊された状態を示す説明図である。
つぎに、図8を参照しつつ、第2実施形態のチャック装置200について説明する。図8(A)は第2実施形態のチャック装置200がチャッキングした状態を示す説明図であり、図8(B)は第2実施形態のチャック装置200の減圧状態が破壊された状態を示す説明図である。
第2実施形態のチャック装置200が第1実施形態のチャック装置100と異なる点は、第2実施形態のチャック装置200が、第3の空気通路107を備えていない点であり、装置の動作も共通する。従って、共通する構成要素については、図面中、同一の参照番号を付し、その詳細な説明は省略する。
第2実施形態において、減圧調整部として機能するのは、第2の空気通路104と、第2の爪部材105が備える当接面105aである。当接面105aは、第1の挟持部102と第2の挟持部106とが閉じた際に第1の爪部材101が当接する面である。第1実施形態では、第2の空気通路104の第3の開口104aと第3の空気通路107の第5の開口107bとが接続し、また、離れることにより減圧動作が実施され、また、終了した。これに対し、第2実施形態では、当接面105aが第2の空気通路104の第3の開口104aを閉塞するか、開放するかによって減圧動作が実施され、また、終了する。このように、第2実施形態のチャック装置200においても、減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことができる。
(第3実施形態)
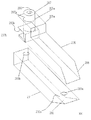
つぎに、第3実施形態のチャック装置300について、図9乃至図11を参照しつつ説明する。図9は第3実施形態のチャック装置300の概略構成を示した説明図である。図10は移動部材207を示す説明図である。図11(A)はチャック装置300がチャッキングした状態を示す説明図であり、図11(B)は対象物50を挟持した状態で減圧状態を破壊した状態を示す説明図であり、図11(C)は挟持していた対象物50を開放した状態を示す説明図である。
つぎに、第3実施形態のチャック装置300について、図9乃至図11を参照しつつ説明する。図9は第3実施形態のチャック装置300の概略構成を示した説明図である。図10は移動部材207を示す説明図である。図11(A)はチャック装置300がチャッキングした状態を示す説明図であり、図11(B)は対象物50を挟持した状態で減圧状態を破壊した状態を示す説明図であり、図11(C)は挟持していた対象物50を開放した状態を示す説明図である。
チャック装置300は、第1の爪部材201と第2の爪部材205を備える。第1の爪部材201は、先端部に第1の挟持部202を備える。第1の爪部材201が第2の爪部材205と対向する面は、平滑面となっている。第1の爪部材201の内部には、第1実施形態の第1の爪部材101と同様に内部に第1の空気通路203が形成されており、第1の開口203aが挟持面202aに開口している。そして、第2の開口203bが第2の爪部材205との対向面に開口している。この点、第1実施形態と異なっている。また、本実施形態の第1の爪部材201は、第1実施形態と異なり第2の空気通路を備えていない。
第2の爪部材205は、後端部に一段高くなった段差部205aを備える。段差部205aには、貫通孔205a1が設けられている。段差部205aにおいて第1の爪部材201と対向する面は、後に詳述する係合部207bが係合する係合面205bを形成している。貫通孔205a1には、移動部材207が摺動自在に装着されている。
移動部材207は、減圧調整部として機能する。移動部材207は、第2の爪部材205に設けられ、開閉駆動部3により第1の爪部材201に対して離接可能とされている。また、移動部材207は、第1の挟持部202と第2の挟持部206とが閉じた際に第2の開口203bに接続される第4の空気通路208が形成されている。第4の空気通路208は、減圧装置5に接続されている。すなわち、第3実施形態では、第4の空気通路208を介して第1の空気通路203が減圧装置5に接続された状態となる。移動部材207は、筒状部207aとこれに連接された鍔状の係合部207bを備える。筒状部207aは、貫通孔205a1に摺動自在に嵌め込まれる。係合部207bは、段差部205aが設けられることにより段差部205aの下側に形成された空間に配置される。係合部207bは、開閉駆動部3により引き上げられることにより、第1の爪部材201から離れつつ第2の爪部材205、より具体的には、係合面205bに係合して第2の爪部材205を第1の爪部材201から離す。
図11(A)に示す状態では、第1の挟持部202と第2の挟持部206とのよって対象物50が挟持されているとともに、第4の空気通路208が第2の開口203bと接続された状態なっている。すなわち、挟持動作と減圧動作が行われる状態となっている。この状態から、図11(B)に示すように、移動部材207を上方に引き上げると、第4の空気通路208と第2の開口203bとの接続状態が解消され、減圧状態が破壊される。そして、図11(C)で示すように、移動部材207がさらに引き上げられ、係合部207bが係合面205bと係合すると、以後、第2の爪部材205が引き上げられ、第1の爪部材201から離れる。
このような第3実施形態のチャック装置300であっても、第1実施形態のチャック装置100や第2実施形態のチャック装置200と同様に、減圧動作及び挟持動作の実行と解除とを適切なタイミングで行うことができる。
以上本発明の好ましい実施形態について詳述したが、本発明は係る特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形、変更が可能である。
1 ハンド装置
2 制御部
3 開閉駆動部
4 駆動連結部
4a フレーム
4a1 接続部
4b 回転支持部
4c スライダ部
5 減圧装置
100、200、300 チャック装置
101、201 第1の爪部材
101a 段差部
101a1 当接面
101b、201a 後端面
102、202 第1の挟持部
102a、202a 挟持面
103、203 第1の空気通路
103a、203a 第1の開口
103b、203b 第2の開口
104 第2の空気通路
104a 第3の開口
105、205 第2の爪部材
105a 当接面
105b 軸部
105cガイド部
106、206 第2の挟持部
107 第3の空気通路
107a 第4の開口
205b 係合面
207 移動部材
207a 筒状部
207b 係合部
208 第4の空気通路
2 制御部
3 開閉駆動部
4 駆動連結部
4a フレーム
4a1 接続部
4b 回転支持部
4c スライダ部
5 減圧装置
100、200、300 チャック装置
101、201 第1の爪部材
101a 段差部
101a1 当接面
101b、201a 後端面
102、202 第1の挟持部
102a、202a 挟持面
103、203 第1の空気通路
103a、203a 第1の開口
103b、203b 第2の開口
104 第2の空気通路
104a 第3の開口
105、205 第2の爪部材
105a 当接面
105b 軸部
105cガイド部
106、206 第2の挟持部
107 第3の空気通路
107a 第4の開口
205b 係合面
207 移動部材
207a 筒状部
207b 係合部
208 第4の空気通路
Claims (6)
- 対象物を挟持する第1の挟持部を備えるとともに、一端が前記第1の挟持部の挟持面に開口する第1の開口であり、他端が減圧装置側の開口となる第2の開口である第1の空気通路が形成された第1の爪部材と、
前記第1の挟持部と共働して対象物を挟持する第2の挟持部を備えるとともに、前記第1の爪部材と対向配置された第2の爪部材と、
前記第1の挟持部と前記第2の挟持部とを開閉させる開閉駆動部と、
前記開閉駆動部により前記第1の挟持部と前記第2の挟持部とを閉じる際に前記第1の空気通路内を減圧状態とするとともに、前記第1の挟持部と前記第2の挟持部とを開く際に前記第1の空気通路を開放して減圧状態を解消する減圧調整部と、
を備えたチャック装置。 - 前記減圧調整部は、
前記第1の空気通路から分岐し、前記第1の挟持部と前記第2の挟持部とが閉じた際に前記第2の爪部材が当接する当接面に開口する第3の開口を備えた第2の空気通路と、
一端が前記第2の挟持部の挟持面に開口する第4の開口であり、他端が前記第1の挟持部と前記第2の挟持部とが閉じた際に前記第1の爪部材が当接する当接面に開口し、前記第3の開口と接続可能に設けられた第5の開口である第3の空気通路と、
を含む請求項1に記載のチャック装置。 - 前記減圧調整部は、
前記第1の空気通路から分岐し、前記第1の挟持部と前記第2の挟持部とが閉じた際に前記第2の爪部が当接する当接面に開口する第3の開口を備えた第2の空気通路と、
前記第1の挟持部と前記第2の挟持部とが閉じた際に前記第1の爪部材が当接する当接面と、
を含む請求項1に記載のチャック装置。 - 前記開閉駆動部は、
前記第2の爪部材に設けられた軸部に係合する回転支持部と、
前記第2の爪部材の前記軸部よりも先端側に設けられ、先端側に向かうに従って下り傾斜となったガイド部に係合するスライダ部と、を有する駆動連結部を含む請求項1乃至3のいずれか1項に記載のチャック装置。 - 前記減圧調整部は、
前記第2の爪部材に設けられ、前記開閉駆動部により前記第1の爪部材に対して離接可能であり、前記第1の挟持部と前記第2の挟持部とが閉じた際に前記第2の開口に接続される第4の空気通路が形成されるとともに、前記開閉駆動部により前記第1の爪部材から離れつつ前記第2の爪部材に係合して前記第2の爪部材を前記第1の爪部材から離す係合部を有する移動部材を含む請求項1に記載のチャック装置。 - 前記第1の挟持部と前記第2の挟持部の少なくとも一方は、柔軟性を有する素材により成形された請求項1乃至5のいずれか1項に記載のチャック装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122263A JP2016002604A (ja) | 2014-06-13 | 2014-06-13 | チャック装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122263A JP2016002604A (ja) | 2014-06-13 | 2014-06-13 | チャック装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016002604A true JP2016002604A (ja) | 2016-01-12 |
Family
ID=55222309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014122263A Pending JP2016002604A (ja) | 2014-06-13 | 2014-06-13 | チャック装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016002604A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018012156A (ja) * | 2016-07-20 | 2018-01-25 | 大和製罐株式会社 | 把持装置 |
| DE102016216853A1 (de) * | 2016-09-06 | 2018-03-08 | E. Braun GmbH Entwicklung und Vertrieb von technischem Zubehör | Greifer für einen Roboter |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04133573U (ja) * | 1992-04-10 | 1992-12-11 | 清 高橋 | 真空ピンセツト |
| JPH0621198A (ja) * | 1992-07-03 | 1994-01-28 | Nippon Steel Corp | ピンセット |
| JP2013233626A (ja) * | 2012-05-10 | 2013-11-21 | Toyota Industries Corp | 吸着装置 |
-
2014
- 2014-06-13 JP JP2014122263A patent/JP2016002604A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04133573U (ja) * | 1992-04-10 | 1992-12-11 | 清 高橋 | 真空ピンセツト |
| JPH0621198A (ja) * | 1992-07-03 | 1994-01-28 | Nippon Steel Corp | ピンセット |
| JP2013233626A (ja) * | 2012-05-10 | 2013-11-21 | Toyota Industries Corp | 吸着装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018012156A (ja) * | 2016-07-20 | 2018-01-25 | 大和製罐株式会社 | 把持装置 |
| DE102016216853A1 (de) * | 2016-09-06 | 2018-03-08 | E. Braun GmbH Entwicklung und Vertrieb von technischem Zubehör | Greifer für einen Roboter |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8915527B2 (en) | Workpiece taking-out method using robot including holding nails | |
| US9882333B2 (en) | Gripping and assembling device for flexible object | |
| JP4097404B2 (ja) | エッジグリッピングエンドエフェクタウエーハハンドリング装置 | |
| CN104203494A (zh) | 卡盘装置 | |
| JP7114603B2 (ja) | 把持装置 | |
| WO2017046975A1 (ja) | 取付装置、取付方法、及びハンド機構 | |
| KR20100071552A (ko) | 전자부품 장착용 그리퍼 장치 | |
| TWI657901B (zh) | 膜吸附機構 | |
| JP2016002604A (ja) | チャック装置 | |
| JP2018075804A (ja) | 真空貼合装置 | |
| JP2013014337A (ja) | ラベル貼付装置及びラベル貼付方法 | |
| KR20180046920A (ko) | 시트 박리 장치 및 박리 방법 | |
| JP2011245566A (ja) | チャック装置 | |
| TW200905754A (en) | Fall-preventing mechanism for product to be molded | |
| WO2008120454A1 (ja) | 振動型アクチュエータの制御装置 | |
| JPWO2019012604A1 (ja) | 部品反転装置 | |
| JP2007134526A (ja) | 基板把持ハンド装置と基板把持方法及びそれを用いた基板搬送装置並びに基板処理装置 | |
| JP2017030090A (ja) | ロボットハンド、情報処理装置製造装置、情報処理装置製造方法 | |
| JP5216450B2 (ja) | ピックアップ装置 | |
| JP5121620B2 (ja) | 電子部品挟持装置および電子部品挟持方法 | |
| JP2006049597A (ja) | 基板搬送装置 | |
| JP2019005866A (ja) | 吸着装置 | |
| JP6374132B1 (ja) | 貼合デバイスの製造装置及び貼合デバイスの製造方法 | |
| CN223303064U (zh) | 撕膜头及撕膜设备 | |
| JP6405200B2 (ja) | 半導体チップ剥離装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171205 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180529 |