JP2016009266A - 撮影システム、撮影の方法、およびコンピュータープログラム - Google Patents
撮影システム、撮影の方法、およびコンピュータープログラム Download PDFInfo
- Publication number
- JP2016009266A JP2016009266A JP2014128508A JP2014128508A JP2016009266A JP 2016009266 A JP2016009266 A JP 2016009266A JP 2014128508 A JP2014128508 A JP 2014128508A JP 2014128508 A JP2014128508 A JP 2014128508A JP 2016009266 A JP2016009266 A JP 2016009266A
- Authority
- JP
- Japan
- Prior art keywords
- area
- image
- target area
- space
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/042—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means
- G06F3/0425—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by opto-electronic means using a single imaging device like a video camera for tracking the absolute position of a single or a plurality of objects with respect to an imaged reference surface, e.g. video camera imaging a display or a projection screen, a table or a wall surface, on which a computer generated image is displayed or projected
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4038—Image mosaicing, e.g. composing plane images from plane sub-images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/22—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/28—Recognition of hand or arm movements, e.g. recognition of deaf sign language
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/262—Studio circuits, e.g. for mixing, switching-over, change of character of image, other special effects ; Cameras specially adapted for the electronic generation of special effects
- H04N5/272—Means for inserting a foreground image in a background image, i.e. inlay, outlay
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Psychiatry (AREA)
- Social Psychology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
【課題】面に書き込まれた画像を従来よりも確実にかつユーザーにとって簡単に記録する。【解決手段】撮影システム1は、面50を撮影する撮影手段と、物体8の面50と撮影手段との間の空間40における位置の変化を検出する検出手段と、検出手段によって変化が検出された場合に、面50の、撮影手段から物体8によって変化の前は見えなかったが変化の後に見えるようになったエリア51の画像を、撮影手段によって取得する、取得手段とを有する。【選択図】図6
Description
本発明は、ホワイトボードなどの面を撮影する技術に関する。
近年、パーソナルコンピューターまたはスマートフォンなどに表示される画像をスクリーンに投影するプロジェクターが普及している。プロジェクターは、「画像投影装置」と呼ばれることもある。
ホワイトボードをスクリーンとして使用することができる。または、壁に白いビニールを貼り、これをスクリーンとして使用することもできる。これらの場合に、ユーザーは、画像がスクリーンに映っているときに、ペンでメモなどを手書きすることができる。そして、ユーザーは、デジタルカメラでスクリーンを撮影し、記録しておくことができる。
ユーザーが簡単に撮影することができるように、次のような技術が提案されている。特許文献1に記載される技術によると、プロジェクターにデジタルカメラを内蔵し、液晶プロジェクター投写用レンズとデジタルカメラ用レンズを共用させる。これにより、プロジェクターから出力されるパソコン映像の投写光とホワイトボードにマーカー等で手書きされた画像の合成画像の入射光が同じレンズを通るので、パソコン映像と手書きの画像を合成映像としてパソコンに取り込む際の位置やサイズの調整が不要になる。
特許文献2に記載される技術によると、画像データを取得する複数の撮像部と、複数の撮像部のそれぞれの撮像方向と撮像画角の少なくとも一方を個別に変更して撮像範囲を変更する撮像範囲変更部と、いずれか1つの撮像部が取得した画像データから操作者のジェスチャを検出するジェスチャ検出部と、検出されたジェスチャに応じて、記録すべき撮像範囲の変更制御及び複数の撮像部に対する撮影指示を含む撮像制御を行う撮像制御部とを備え、撮像制御部は、記録すべき撮像範囲の変更制御に際して、撮影範囲変更手段を制御して、複数の撮像部のうちの一部の撮像部である本撮像部の撮影範囲をジェスチャ検出部で検出したジェスチャに応じて変更させるとともに、本撮像部の撮像範囲から操作者が含まれなくなる場合は本撮像部以外の撮像部の撮像範囲の変更を操作者が含まれる範囲に制限する。
特許文献3に記載される技術によると、画像処理装置は、供給された撮影画像信号からホワイトボード上に投影された投影画像のフレーム枠領域を検出すると共に、フレーム枠領域に対する動体の出入りの有無を判定する。動体の出入りがある場合、その前後のフレーム枠領域の画像の差異を検出し、差異領域の画像を取得して元画像と合成して合成画像を生成する。この処理を、プロジェクタにより投影される元画像が、次の画像に変更されるまで繰り返して実行し、順次、差異画像と元画像とを合成した合成画像を生成する。投影画像が次の画像に切り替えられた時点で、直前の元画像に対して合成画像を追記順に関連付ける。そして、元画像に対して追記順に関連付けられた合成画像を、元画像の次ページからの画像として挿入する。
上述の従来の技術によると、ユーザーがホワイトボードなどの面に書き込んだ画像を、この面にプロジェクターによって投影された画像とともに撮影し記録することができる。
しかし、これらの画像を、ユーザーの身体または指し棒などによって隠れることなく確実に撮影するために、ユーザーは、面から離れなければならない。これを意識することは、ユーザーにとってストレスになったりプレッシャーになったりすることがある。また、ユーザーが面から離れることを忘れたり、ユーザーが離れたつもりであっても実際は離れていなかったりすると、上手く撮影することができないことがある。
本発明は、このような問題点に鑑み、面に書き込まれた画像を従来よりも確実にかつユーザーにとって簡単に記録することを、目的とする。
本発明の一形態に係る撮影システムは、面を撮影する撮影手段と、物体の、前記面と前記撮影手段との間の空間における位置の変化を検出する、検出手段と、前記検出手段によって前記変化が検出された場合に、前記面における、前記撮影手段から前記物体によって当該変化の前は見えなかったが当該変化の後に見えるようになったエリアの画像を、当該撮影手段によって取得する、取得手段と、を有する。
本発明によると、面に書き込まれた画像を従来よりも確実にかつユーザーにとって簡単に記録することができる。
〔実施形態1〕
図1のようにプロジェクター1とホワイトボード5とを使用してプレゼンテーションが行なわれる。プロジェクター1にはプレゼンター8または補助者9によって操作されるパーソナルコンピューター7が接続され、投影すべき画像のデータおよび投影の指示がパーソナルコンピューター7から与えられる。プロジェクター1は、パーソナルコンピューター7からの指示に従って、ホワイトボード5にプレゼンテーション用の画像を投影する。ホワイトボード5は投影のスクリーンとして用いられる。
図1のようにプロジェクター1とホワイトボード5とを使用してプレゼンテーションが行なわれる。プロジェクター1にはプレゼンター8または補助者9によって操作されるパーソナルコンピューター7が接続され、投影すべき画像のデータおよび投影の指示がパーソナルコンピューター7から与えられる。プロジェクター1は、パーソナルコンピューター7からの指示に従って、ホワイトボード5にプレゼンテーション用の画像を投影する。ホワイトボード5は投影のスクリーンとして用いられる。
ホワイトボード5は、消去可能な書込みをすることのできるボード面50を有している。プレゼンター8は、例えば投影された画像に補足説明を加えたり図示で強調したりしたい場合に、文字、記号、線、矢印、丸印、図形またはこれらを組み合わせた任意の内容をボード面50に書き込むことができる。つまり、ボード面50は、プレゼンター8によって書き込みのなされる可能性のある面である。
プロジェクター1は、プレゼンター8の書き込んだ内容を自動的に記録する撮影機能を有している。プロジェクター1は、プレゼンター8の動きを監視し、書込みが行なわれたと判断したときにホワイトボード5を撮影し、得られた撮影データを保存する。
本実施形態1のプロジェクター1の撮影機能には、ボード面50を複数のエリア(分割エリア)に区切り、これら複数のエリアのうちの1以上のエリアを書込みの内容を記録する処理の対象である“対象エリア”に設定し、対象エリアが物体(オブジェクト)の陰に隠れていない状態になったことを検出したときにボード面50を撮影する、という特徴がある。以下、このような撮影機能を中心にプロジェクター1の構成および動作を説明する。
プロジェクター1のハードウェア構成が図2に示される。プロジェクター1は、投影ユニット11、カメラ12、オブジェクトセンサー13、CPU(Central Processing Unit)15、RAM(Random Access Memory)16、不揮発性メモリ17、画像処理部18、インタフェース19、ランプドライバー20、およびDC電源21を有している。
投影ユニット11は、ボード面50に投影によって画像を表示する表示手段である。投影ユニット11は、投影すべき画像を表示する液晶パネル、液晶パネルの背面側に配置された投光ランプ、および投影面に画像を結像させるレンズ群を有する。投影ユニット11には、DC電源21からランプドライバー20を介して投光ランプの発光に必要な電力が供給される。
カメラ12はボード面50を撮影する撮影手段である。カメラ12は、二次元の撮像デバイスを有し、撮像デバイスによって得られた撮影データを画像処理部18に出力する。なお、カメラ12は、一次元の撮像デバイスと走査用の光学系とによって二次元の撮影像を得る走査型のカメラでもよい。
オブジェクトセンサー13は、ボード面50とカメラ12との間にオブジェクトが存在する場合に、そのオブジェクトを検出するための距離画像センサーである。オブジェクトセンサー13は、撮像デバイスと赤外線を射出する発光素子とを備え、TOF(Time Of Flight)法による測距のための赤外線撮影データをCPU15に出力する。
CPU15は、プロジェクター1を制御するためのプログラムを不揮発性メモリ17からRAM16にロードして実行する。CPU15は、外部機器との通信用のインタフェース19を介して上述のパーソナルコンピューター7と通信し、パーソナルコンピューター7からの指示に従ってプロジェクター1に画像を投影させる。このほかにも、CPU15は、後述するようにオブジェクトを検出したり、ボード面50の撮影に関わる対象エリアを設定したり、カメラ12によって得られた撮影データを不揮発性メモリ17に格納したりするなどの各種の処理を実行する。不揮発性メモリ17は、例えばフラッシュメモリである。
画像処理部18は、パーソナルコンピューター7から与えられるデータに応じたビットマップをメモリ上に展開し、投影すべき画像を投影ユニット11の液晶パネルに表示させる。また、画像処理部18は、カメラ12によって得られる撮影データを圧縮する処理を受け持つ。このような画像処理部18は、例えばASIC(Application Specific Integrated Circuit)からなる。
インタフェース19は、USB(Universal Serial Bus)の規格に準拠した有線通信を可能にするUSB部191、およびWi−Fiの規格に準拠した無線通信を可能にするWi−Fi部192を備えている。
さて、本実施形態1のプロジェクター1は、ボード面50に書き込まれた内容をそれが隠れていないタイミングで撮影して記録するため、撮影空間40におけるオブジェクトの位置の変化を検出する。撮影空間40は、ボード面50とプロジェクター1との間の空間のうちのカメラ12による撮影の視野内の部分である。オブジェクトの位置の変化の検出方法は次のとおりである。
CPU15は、オブジェクトセンサー13によって取得した赤外線撮影データに基づいて、赤外線の射出からオブジェクトの表面で反射した赤外線が撮像デバイスに受光されるまでの時間(光の飛行時間)を、撮像デバイスの画素ごとに測定する。このとき、測定する最大距離に応じた所定の時間にわたって赤外線をオブジェクトに向けて照射し、照射中の総受光量を光の飛行時間として測定する手法を用いる。光の飛行時間はオブジェクトセンサー13とオブジェクトとの距離に比例するので、画素ごとに光の飛行時間を測定することによって、オブジェクトセンサー13による撮像の視野に対応する距離画像が得られる。
CPU15は、得られた距離画像の各画素値(測距値)と予め記憶しているホワイトボード5までの距離(既知の距離)とを比較する。この既知の距離については、予めプロジェクター1が測定するようにしてもよいし、ユーザーが入力するようにしてもよい。CPU15は、距離画像において測距値が既知の距離よりも小さい画素の個数が所定数以上である場合、撮影空間40の中にオブジェクトが有ると判定する。測距値が既知の距離よりも小さい画素の個数が所定数未満である場合、CPU15はオブジェクトが無いと判定する。所定数は、実際には無いにもかかわらずオブジェクトが有ると判定するのを防ぐための閾値である。仮に外乱光または他の原因によって既知の距離よりも小さい誤った測距値をもってしまった画素が距離画像に含まれていたとしても、その個数が所定数未満であれば、オブジェクトが無いと判定される。
なお、厳密には、オブジェクトセンサー13とカメラ12との間で視野のずれがある。しかし、そのずれは書込みの記録に実質的に影響の無い僅かなずれである。それ故、本実施形態1では、オブジェクトセンサー13の視野がカメラ12の視野に相当するものとされ、オブジェクトセンサー13によって得られる距離画像に基づいて、撮影空間40内のオブジェクトが検出される。
撮影空間40におけるオブジェクトの存在を検出した場合、CPU15は、距離画像から当該オブジェクトに対応する部分(測距値が上述の既知の距離より小さい部分)を抽出する。この抽出によって、オブジェクトの大きさおよび撮影空間40におけるオブジェクトの位置(三次元位置)が特定される。抽出に際して、カメラ12またはオブジェクトセンサー13によって二次元撮影像を取得して画像認識を行ない、距離画像の測距値の比較結果と二次元撮影像の画像認識の結果とを総合して距離画像の各画素がオブジェクトに対応するかどうかを判定してもよい。
CPU15は、オブジェクトセンサー13を例えば0.5〜3秒程度の間隔で周期的に動作させて、その都度、最新の赤外線撮影データをオブジェクトセンサー13から取得する。CPU15は、オブジェクトセンサー13から赤外線撮影データを取得するごとに、撮影空間40におけるオブジェクトの有無を判定し、オブジェクトが有ると判定した場合には、オブジェクトの大きさおよび位置を特定する。周期的にオブジェクトの位置を特定することにより、撮影空間40に対するオブジェクトの出入り、および撮影空間40におけるオブジェクトの位置の変化を検出することができる。
なお、CPU15がオブジェクトセンサー13から赤外線撮影データを取得する周期を、撮影空間40におけるオブジェクトの有無に応じて切り替えることができる。そのようにする場合、CPU15は、撮影空間40にオブジェクトが存在することを検出してからその後にオブジェクトが存在しないことを検出するまでの期間(オブジェクトが有るとき)において、例えば0.5〜1秒程度の間隔で赤外線撮影データを取得する。これ以外の期間(オブジェクトが無いとき)において、CPU15はオブジェクトが有るときよりも長い間隔(例えば1〜3秒程度)で赤外線撮影データを取得する。
オブジェクトの例が図3に示される。プロジェクター1を使用してプレゼンテーションが行なわれているとき、撮影空間40に出入りするのはプレゼンター8にほぼ限られる。本実施形態では、オブジェクト30として、プレゼンター8の身体(全身または上半身)31、ペン37とそれを持つ手311との組合せ32、指し棒38とそれを持つ手312との組合せ33、イレーサー39とそれを持つ手312との組合せ34、どこかを指差す形状の手35、および手のひら36などが想定されている。
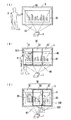
図4はボード面50とオブジェクト30との位置関係の例を示している。
図4(A)では、撮影空間40内の左右方向の中央部におけるボード面50の間近に、オブジェクト30が存在する。この場合、ボード面50のうちの左右方向の中央付近がオブジェクト30の陰に隠れる。「オブジェクト30の陰に隠れる」とは、オブジェクト30に遮られてカメラ12から見えないことを意味する。
図4(B)では、撮影空間40内の右端部におけるボード面50の間近に、オブジェクト30が存在する。この場合、ボード面50のうちの右端の近傍がオブジェクト30の陰に隠れる。
図4(C)では、撮影空間40内の右側部におけるプロジェクター1に近い位置にオブジェクト30が存在する。この場合、ボード面50のうちの右端の近傍から中央部の近傍までの比較的に広い部分がオブジェクト30の陰に隠れる。
図5はプロジェクター1の機能構成を示している。プロジェクター1は、第一の検出部101、エリア設定部102、第二の検出部103、枠表示制御部104、および撮影制御部105を有する。これら要素は、CPU15がプログラムを実行することによって実現される機能要素である。
第一の検出部101は、オブジェクト30を検出する手段である。第一の検出部101は、オブジェクトセンサー13から上述のとおり周期的に最新の赤外線撮影データを取得し、赤外線撮影データを取得するごとに、撮影空間40内のオブジェクト30の有無を検出する。その際、第一の検出部101は、取得した赤外線撮影データに基づいて距離画像を作成する。
エリア設定部102は、上述の対象エリアを設定する設定手段である。エリア設定部102は、撮影空間40内にオブジェクト30の入ったことが第一の検出部101によって検出されたとき、第一の検出部101から最新の距離画像を取得し、オブジェクト30の大きさおよび位置を検出する。次に、エリア設定部102は、距離画像に位置関係に基づいて、ボード面50のうちのカメラ12に対してオブジェクト30の陰に隠れる部分を特定し、特定した部分の大きさに応じて、ボード面50を後述のように複数のエリア(分割エリア)に区切る。ボード面50を区切った後、エリア設定部102は、複数のエリアのうち、オブジェクト30の陰に隠れる部分を有するエリアを対象エリアに設定する。
また、エリア設定部102は、オブジェクト30の陰に隠れる部分が現在の対象エリアではないエリアに移ったことを検出したとき、そのときのオブジェクト30の大きさが以前と比べて設定値を超えるほど大きく異なる場合、ボード面50を区切り直して対象エリアを設定する。
第二の検出部103は、撮影空間40におけるオブジェクト30の位置の変化を検出する検出手段である。第二の検出部103は、エリア設定部102によって対象エリアが設定された後、第一の検出部101によって赤外線撮影データが取得されるごとに、第一の検出部101から最新の距離画像を取得してオブジェクト30の位置を特定する。そして、第二の検出部103は、オブジェクト30の位置がカメラ12に対して対象エリアを隠す位置から隠さない位置に変化したことを検出する。
なお、「カメラ12に対して対象エリアを隠す」とは、カメラ12から対象エリアの全域を見通せないようにすることを意味する。以下において、あるエリアにおいてどこか一部でもオブジェクト30に遮られて見えない状態、すなわち部分的または全体的に見えない状態を、「オブジェクト30の陰に隠れた状態」ということがある。
枠表示制御部104は、投影ユニット11に枠を表示させる手段である。枠表示制御部104は、エリア設定部102によって対象エリアが設定されたとき、対象エリアの輪郭を示す識別画像である赤色または他の所定色の枠をボード面50上に表示するように投影ユニット11を制御する。枠は、対象エリアの大きさおよび位置を示すものであればよく、輝度が周囲と異なるものであってもよい。枠の表示に代えてまたは枠の表示と合わせて、対象エリアの全域の輝度または背景色を他のエリアと異ならせることも可能である。対象エリアに地紋を付すこともできる。
撮影制御部105は、対象エリアに表示されている画像をカメラ12によって取得する取得手段である。撮影制御部105は、オブジェクト30の位置が対象エリアを隠す位置から隠さない位置に変化したことが第二の検出部103によって検出されたとき、この変化の前は見えなかったが変化の後に見えるようになった対象エリアを撮影するようにカメラ12を制御する。本実施形態では、対象エリアを含むボード面50の全域を撮影するように制御する。
図6はボード面50の撮影に係る対象エリアの設定の一例を示し、図7はオブジェクト30の移動に応じて行なわれる撮影の第一例を示している。これらの図の例では、プレゼンター8がホワイトボード5に書込みをし、その後、ホワイトボード5の前を歩いたり立ち止まったりしながらプレゼンテーションを続ける場面が想定されている。プロジェクター1は、オブジェクト30としてのプレゼンター8の位置の変化に応じて、次のとおり対象エリアを設定し、対象エリア内の書込みの内容を記録するための撮影を行なう。
図6(A)では、パーソナルコンピューター7によって与えられる画像90がホワイトボード5に投影されている。図に示された画像90は棒グラフである。プレゼンター8は、ホワイトボード5の向かって左側の傍らに立っている。
なお、ホワイトボード5におけるボード面50の全域が撮影空間40に収まるようにカメラ12の視野が調整されている。図6では、撮影空間40にボード面50がちょうど収まっているが、これに限らない。書込みの行なわれる可能性のある領域であるボード面50およびその周囲を含む範囲が撮影空間40内に収まれるように、カメラ12の視野が調整されていてもよい。つまり、少なくともボード面50の全域を撮影することができればよい。
図6(A)の段階で撮影空間40の外に居たプレゼンター8が、右方へ移動して図6(B)のようにボード面50の左端部の前に立って書込みをしたとする。図6(B)では、ボード面50の左端部に文字列80が書き込まれている。
図6(A)の状態から図6(B)の状態へ遷移する途中に、プレゼンター8が撮影空間40の中に入ったタイミングで、第一の検出部101がプレゼンター8をオブジェクト30として検出する。第一の検出部101からオブジェクト30を検出したことの通知を受けると、エリア設定部102は、オブジェクト30に応じて、ボード面50を複数のエリア51,52,53に区切る。図6(B)の例では、左右方向に三等分するようにボード面50が三つのエリア51,52,53に区切られている。
ボード面50の区切りについて、あらかじめ幾つかの区切りパターンが選択肢として定められ、それらを示すデータが不揮発性メモリ17に記憶されている。エリア設定部102は、オブジェクト30の大きさに応じて、いずれかの区切りパターンを選択してボード面50を区切る。
例えば、オブジェクト30の上下方向の寸法が閾値(例えばボード面50の上下方向の寸法の2分の1)よりも大きい場合の選択肢として、それぞれがボード面50の上端から下端にわたる二つ、三つまたは四つ以上のエリアが左右に並ぶ区切りパターンがある。オブジェクト30の上下方向の寸法が閾値よりも大きい場合、これら区切りパターンのいずれかがオブジェクト30の左右方向の寸法に応じて選択され、選択結果に従ってボード面50が区切られる。左右方向の寸法が大きいほど、左右方向の区切り数の少ない区切りパターンが選択される。図6(B)の例は三つのエリアが並ぶ区切りパターンが選択された例である。
また、オブジェクト30の上下方向の寸法が上記の所定の閾値よりも小さい場合の選択肢として、ボード面50を上下に二分し、左右に二つ、三つまたは四つ以上に分けるような区切りパターンがある。オブジェクト30の上下方向の寸法が上記の所定の閾値よりも小さい場合、これら区切りパターンのいずれかがオブジェクト30の左右方向の寸法に応じて選択され、選択結果に従ってボード面50が区切られる。後述する図8(A)の例は、計六つのエリアが並ぶ区切りパターンが選択された例である。
このようにボード面50を区切る際、エリア設定部102は、対象エリアとするエリアが、オブジェクト30の陰に隠れる部分の全体が収まる大きさをもつ範囲内で最も小さいエリアとなるように、区切りパターンの選択肢の一つを選択する。各エリアが小さいことは、プレゼンター8が撮影に気を払わずに行動することができる環境を実現する上で有利である。エリアの大きさをオブジェクト30の陰に隠れる部分の全体が収まる大きさにすることにより、書込みが部分的に欠けて記録されるのをできるだけ少なくすることができる。
ボード面50を複数のエリア51,52,53に区切ると、エリア設定部102は、複数のエリア51,52,53のうち、オブジェクト30の陰に隠れているエリア51を判別する。そして、エリア設定部102は、判別したそのようなエリア51を対象エリアに設定する。実施形態1における対象エリアは、ボード面50のうちのオブジェクト30の陰に隠れたことがある部分である。対象エリアには、オブジェクト30の陰に隠れたときに何らかの書込みが行なわれた可能性がある。図6(B)の場合は、左右に並ぶ三つのエリア51,52,53のうち、左のエリア51が対象エリアに設定される。
エリア設定部102によって対象エリアが設定されると、枠表示制御部104が、対象エリアの輪郭を示す枠510を表示するように投影ユニット11を制御する。投影ユニット11は、画像90を描画するレイヤーと枠510を描画するレイヤーとを重ねて投影する手法を用いて、画像50を表示したまま枠510を表示する。
枠510が表示されることにより、プレゼンター8は、ボード面50内のどの範囲の書込みの内容が記録されるかを知ることができる。
なお、枠510を表示するモードと表示しないモードとを設け、プロジェクター1のユーザーが適宜これらモードの一方を選択できるようにしてもよい。表示しないモードが選択された場合、枠表示制御部104は、投影ユニット11に枠510を表示させる制御を行なわない。
図6(B)の段階でボード面50の左端部の前に立っていたプレゼンター8が、右方へ移動し、図6(C)のようにボード面50におけるエリア52,53を隠す位置に立ったとする。
図6(B)の状態から図6(C)の状態へ遷移する途中に、プレゼンター8がその時点の対象エリアであるエリア51を隠さない位置まで移動したタイミングで、言い換えると、撮影空間40のうちの対象エリアがちょうど収まる部分である対象エリア空間からプレゼンター8が出たタイミングで、オブジェクト30であるプレゼンター8の位置の変化したことが第二の検出部103によって検出される。そして、このとき、撮影制御部105がボード面50を撮影するようにカメラ12を制御する。
本実施形態1では、ボード面50の全体を撮影し、得られた撮影データのうちの対象エリアに対応する部分を不揮発性メモリ17に保存する。ただし、これに限らず、ボード面50のうちの対象エリアを選択的に撮影するようにしてもよい。
撮影データの保存に際して、どの画像が表示されているときに撮影されたかが判るように、保存する撮影データに現在表示されている画像90の識別情報が付加される。また、撮影データがボード面50のどこに対応するかが判るように、対象エリアの位置情報が付加される。さらに、同じ画像90が表示されている期間に複数回の撮影が行なわれた場合に撮影の順序が判るように、撮影の順序を特定する情報または撮影時刻も撮影データに付加される。
撮影制御部105は、カメラ12によって得られた撮影データから対象エリアに対応する部分を抽出して圧縮するように画像処理部18を制御し、得られた圧縮後の撮影データをそれに画像90の識別情報などを付加して不揮発性メモリ17に格納する。
このようにエリア51のおける書込みの内容を記録するためにボード面50が撮影されると、エリア設定部102は、エリア51を対象エリアとした設定を解除する。
一方、図6(C)では、二つのエリア52,53をそれぞれ部分的に隠す位置にプレゼンター8が立っている。この状態になるまでプレゼンター8が立ったまま移動したとすると、エリア設定部102が検出するオブジェクト30の大きさは、図6(B)の状態で検出した大きさとほぼ変わらない。このため、ボード面50を三つのエリア51,52,53に区切ったまま、各エリア51,52,53について、オブジェクト30の陰に隠れているエリアであるかどうかが判定される。
エリア設定部102は、エリア52を隠す位置にプレゼンター8が移動したタイミングで、エリア52をオブジェクト30の陰に隠れているエリアであると判定する。そして、エリア52を対象エリアに設定する。これを受けて、枠表示制御部104は、対象エリアであるエリア52の輪郭を示す枠520を投影ユニット11に表示させる。
また、エリア53を隠す位置にプレゼンター8が移動したタイミングで、エリア設定部102は、エリア53をオブジェクト30の陰に隠れているエリアであると判定する。そして、エリア53を対象エリアに設定する。これを受けて、枠表示制御部104は、対象エリアであるエリア53の輪郭を示す枠530を投影ユニット11に表示させる。
プレゼンター8がエリア53を隠す位置に移動してもなおエリア52がプレゼンター8の陰に隠れる状態が続いているので、エリア52を対象エリアとした設定は解除されない。このため、図6(C)では、二つのエリア52,53が共に対象エリアであり、そのことが枠520,530を投影することによって表示されている。
図7(A)では、図6(C)と同様の状態が簡略化されて描かれている。プレゼンター8は、エリア51に書込みをした後、図示のようにエリア52とエリア53とをそれぞれ部分的に隠す位置に立っている。図7(A)では二つのエリア52,53がそれぞれ対象エリアに設定されている。
図7(A)の状態になる以前における、エリア51に書込みをしたプレゼンター8がエリア51を隠さない位置へ移動したタイミングで、上述したようにエリア51のおける書込みの内容を記録するためにボード面50の撮影が行なわれ、エリア51の撮影データD511が保存される。
図7(A)の状態からプレゼンター8が左方へ移動して図7(B)の状態になったとする。図7(B)では、プレゼンター8はボード面50の前にエリア51とエリア52とをそれぞれ部分的に隠すように立っている。
図7(A)の状態からプレゼンター8が左方へ移動する過程で、図7(A)では対象エリアであったエリア53がプレゼンター8によって隠されていない状態になる。この状態になるタイミングでボード面50の撮影が行なわれ、エリア53の撮影データD531が保存される。
図7(B)では、エリア51とエリア52とがそれぞれプレゼンター8の陰に隠れており、これら二つのエリア551,52がそれぞれ対象エリアに設定されている。また、エリア53を対象エリアとした設定は解除されている。
図7(B)の状態からプレゼンター8が左方へさらに移動して図7(C)の状態になったとする。図7(C)では、プレゼンター8はボード面50の左端部の前に立っており、エリア51がプレゼンター8の陰に隠れている。
図7(B)の状態からプレゼンター8が左方へ移動する過程で、図7(B)では対象エリアであったエリア52がプレゼンター8の陰に隠れていない状態になる。この状態になるタイミングでボード面50の撮影が行なわれ、エリア52の撮影データD521が保存される。図7(C)では、エリア51が対象エリアに設定されており、エリア52を対象エリアとした設定は解除されている。
図7(C)の状態からプレゼンター8が左方へさらに移動して図7(D)の状態になったとする。図7(D)では、プレゼンター8はボード面50の向かって左側の傍らに立っている。ボード面50はプレゼンター8の陰に隠れていない。
図7(C)の状態からプレゼンター8が左方へ移動する過程で、図7(C)では対象エリアであったエリア51がプレゼンター8の陰に隠れていない状態になる。この状態になるタイミングでボード面50の撮影が行なわれ、エリア51の撮影データD512が保存される。図7(D)では、エリア51を対象エリアとした設定は解除されている。
図8はオブジェクト30の移動に応じて行なわれる撮影の第二例を示ている。図8の例では、図6(A)のようにボード面50の向かって左側に立ってしたプレゼンター8が、しゃがんでボード面50の左下隅部に書込みをし、その後、立ち上がって右方へ少し移動し、立ったまま左方へ戻るという場面が想定されている。
図8(A)では、ボード面50の左下隅部が、しゃがんだプレゼンター8の陰に隠れている。ここで、図8(A)の状態になる以前の、プレゼンター8が撮影空間40の中に入る時点で、既にプレゼンター8はしゃがんでいたとする。つまり、第一の検出部101がオブジェクト30を検出してエリア設定部102がボード面50を区切るとき、オブジェクト30の上下方向の寸法が所定の閾値よりも小さかったとする。この場合、ボード面50は、エリア設定部102によって図8(A)のように例えば2行3列に並ぶ六つのエリア54,55,56,57,58,59に区切られる。
図8(A)では、六つのエリア54〜59のうち、プレゼンター8の陰に隠れるエリア57が対象エリアに設定されている。
図8(A)の状態からプレゼンター8が立ち上がって右方へ移動して図8(B)の状態になったとする。図8(B)では、プレゼンター8はボード面50の中央部の前に立っている。
図8(A)の状態からプレゼンター8が右方へ移動する過程で、図8(A)では対象エリアであったエリア57がプレゼンター8の陰に隠れていない状態になる。この状態になるタイミングでボード面50の撮影が行なわれ、エリア57の撮影データD571が保存される。
一方、図8(A)の状態からプレゼンター8が右方へ移動する際に図8(B)のように立ち上がったことにより、ボード面50の区切りに関わるオブジェクト30の大きさが増大する。それをエリア設定部102が検知してボード面50を区切り直す。図8(B)では、図6、7の例と同様に、ボード面50は三つのエリア51,52,53に区切られている。そして、中央のエリア52が対象エリアに設定され、エリア57を対象エリアとした設定は解除されている。
図8(B)の状態からプレゼンター8が立ち上がった姿勢のまま左方へ移動して図8(C)の状態になったとする。図8(C)では、プレゼンター8はボード面50の左端部の前に立っている。
図8(B)の状態からプレゼンター8が左方へ移動する過程で、図8(B)では対象エリアであったエリア52がプレゼンター8の陰に隠れていない状態になる、この状態になるタイミングでボード面50の撮影が行なわれ、エリア52の撮影データD521が保存される。そして、当該エリア52を対象エリアとした設定は解除され、プレゼンター8の陰に隠れているエリア51が対象エリアに設定される。
この後、図示を省略したが、エリア51がプレゼンター8の陰に隠れていない状態になったタイミングでボード面50の撮影が行なわれ、エリア51の撮影データが保存される。
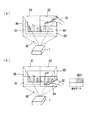
図9は、オブジェクトの移動に応じて行なわれる撮影の第三例を示す図である。第三例では、机の上に置かれまたは壁に貼られた無地の紙の紙面60に、プロジェクター1によって画像90を投影する場面が想定されている。
図9(A)では、プロジェクター1のユーザーが、画像90が投影されている状態の紙面60における右上部に書込みをしている。ペンとそれを持つユーザーの手との組合せであるオブジェクト32が、紙面60をプロジェクター1に対して隠す位置に存在する。
上述の第一例および第二例と同様に、撮影空間42内にオブジェクト32の有ることが第一の検出部101によって検出される。撮影空間42は、プロジェクター1のカメラ12と紙面60との間の空間である。第一の検出部101からオブジェクト32が有るとの検出結果の通知を受けて、エリア設定部102が紙面60を区切って対象エリアを設定する。図9(A)では、紙面60がそれを2行2列に四等分するように四つのエリア61,62,63,64に区切られており、これらのエリア61,62,63,64のうち、オブジェクト32の陰に隠れているエリア62が対象エリアに設定されている。
図9(A)の状態からユーザーが手を図の下方へ移動させて図9(B)の状態になったとする。図9(B)では、ユーザーが紙面60における右下部に書込みをしており、紙面60がオブジェクト32の陰に隠れている。図9(B)の状態ではエリア64が対象エリアに設定される。
図9(A)の状態からユーザーの手が図の下方へ移動する過程で、図9(A)では対象エリアであったエリア62がオブジェクト32の陰に隠れていない図9(B)の状態になる。このような状態遷移に係るオブジェクト32の位置の変化が第二の検出部103によって検出されたとき、撮影制御部105が紙面60を撮影するようにカメラ12を制御する。そして、撮影制御部105によって、紙面60の撮影データのうちのエリア62に対応する部分である撮影データD621が不揮発性メモリ16に格納される。これによって書込みの記録を終えたエリア62については、対象エリアとした設定が解除される。
以上の実施形態1のプロジェクター1における処理の流れを、図10のフローチャートを参照しながらまとめる。ここでは、投影のスクリーンとしてホワイトボード5を用いるものとする。
プロジェクター1は、パーソナルコンピューター7からの指示に従って、パーソナルコンピューター7から与えられる画像90をホワイトボード5に投影する(S10)。
第一の検出部101が撮影空間40の中にオブジェクト30の有ることを検出すると(S11でYES)、エリア設定部102が、オブジェクト30の大きさに応じて、ボード面50を複数のエリア(分割エリア)51〜53または54〜59に区切る(S12)。また、エリア設定部102は、複数のエリアのうち、オブジェクト30の陰に隠れるエリアを判別し、判別したエリアを撮影データの保存に関わる対象エリアに設定する。そして、枠表示制御部104が、設定された対象エリアの位置を示す枠510,520,530を投影ユニット11に表示させる(S13)。
第二の検出部103が、撮影空間40のうちのカメラ12と対象エリアとの間の部分である対象エリア空間の内から外へオブジェクト30の位置が変化したことを検出すると(S14でYES)、撮影制御部105がカメラ12にボード面50を撮影させる(S15)。そして、撮影制御部105は、カメラ12によって得られた撮影データのうちの対象エリアに対応する部分を不揮発性メモリ17に格納する(S16)。このとき、撮影データと画像90とを対応づけて保存する処理として、例えば画像90の識別情報を撮影データに付加する。
パーソナルコンピューター7から画像の切替えまたは投光の終了が指示されるまで、画像90の投影が続く。プロジェクター1は、画像90の投影が終了したかどうかをチェックし(S17)、投影が終了していない場合(S17でNO)、ステップS11に戻って画像90の表示中の書込みの内容を記録するための処理(S11〜S17)を続ける。画像90の投影が終了した場合(S32でYES)、プロジェクター3は、図9に示される動作を終了する。
なお、画像の切替え指示に従って画像90の投影を終了した場合、画像90に代わって表示される画像の表示中の書込みの内容を記録するため、改めてステップS10〜S17を実行する。
以上のとおり、実施形態1では、ボード面50または紙面60を区切ることで得られる複数のエリア51〜59または61〜64のそれぞれを書込みの記録の単位とする。これにより、記録する撮影像にオブジェクト30が映り込まないように撮影をする時期を、ボード面50または紙面60内の注目する部分を隠さない位置までオブジェクト30が移動した時点とすることができる。これに対して、ボード面50の全体を記録の単位とする場合には、オブジェクト30がボード面50のいずれの部分も隠さない位置までオブジェクトが移動するまで、撮影を待たねばならない。
実施形態1は、ボード面50または紙面60の全体を記録の単位とする構成との比較の上で、次の(1)〜(2)の効果を有する。
(1)プレゼンテーションに使用される場合において、プレゼンター8は、書込みの内容をプロジェクター1に記録させるために、書込みをしたエリアの前から立ち退けばよく、ボード面50の前から退避する必要はない。したがって、書込みをした位置にもよるが、概して、書込みをした後に行なうべき移動(立ち退き)の距離が短い。特に、プレゼンター8が頻繁に書込みを行なう場合、プレゼンター8にとって書込みを行なうごとの移動は面倒で大きな負担となる。しかし、移動距離が短くなることで、このようなプレゼンター8の負担が軽減される。
(1)プレゼンテーションに使用される場合において、プレゼンター8は、書込みの内容をプロジェクター1に記録させるために、書込みをしたエリアの前から立ち退けばよく、ボード面50の前から退避する必要はない。したがって、書込みをした位置にもよるが、概して、書込みをした後に行なうべき移動(立ち退き)の距離が短い。特に、プレゼンター8が頻繁に書込みを行なう場合、プレゼンター8にとって書込みを行なうごとの移動は面倒で大きな負担となる。しかし、移動距離が短くなることで、このようなプレゼンター8の負担が軽減される。
紙面60に書込みが行なわれる場合も同様に、プロジェクター1のユーザーは、紙面60に書込みをした後、筆記具をもつ手を対象エリアを隠さない位置まで移動させるだけで書込みの内容を記録させることができ、紙面60を隠さない位置まで手を大きく移動させる必要がない。手を移動させる距離が短くなることで、ユーザーの負担が軽減される。
(2)プレゼンテーションに使用される場合において、プレゼンター8が書込み後の自己の行動に気を払わずにプレゼンテーションを続けたとしても、書込みの記録の漏れを少なくすることができる。つまり、プレゼンテーションでは、プレゼンター8がボード面50の前に居続けることはなく、書込みをした後に書き込んだエリアが聴衆に見えるように立ち位置を変えたりペンを持つ腕を下ろしたりするのが通常である。通常の振る舞いを行ないさえすれば、書込みのなされたエリアが隠れていない状態が自然に生じ、書込みを記録するための撮影が自動的に行なわれる。
(2)プレゼンテーションに使用される場合において、プレゼンター8が書込み後の自己の行動に気を払わずにプレゼンテーションを続けたとしても、書込みの記録の漏れを少なくすることができる。つまり、プレゼンテーションでは、プレゼンター8がボード面50の前に居続けることはなく、書込みをした後に書き込んだエリアが聴衆に見えるように立ち位置を変えたりペンを持つ腕を下ろしたりするのが通常である。通常の振る舞いを行ないさえすれば、書込みのなされたエリアが隠れていない状態が自然に生じ、書込みを記録するための撮影が自動的に行なわれる。
これに対して、ボード面50の全体を記録の単位とする構成では、プレゼンター8が書込みをした後、撮影空間40から出ることなく画像を切り替えたりプレゼンテーションを終えたりした場合、ボード面50内の書き込まれた位置にかかわらず、一切の書込みが記録されない。実施形態1では、プレゼンター8が書込みをしたエリアを隠さない位置へ移動さえすれば撮影が行なわれるので、ボード面50の全体を記録の単位とする構成と比べて、画像90の表示中に行なわれた一切の書込みが記録されないという事態の発生する確率は小さい。
紙面60に書込みが行なわれる場合も同様に、ユーザーが書込み後の手の移動に気を払わずに自然に振る舞ったとしても、書込みの記録の漏れが生じることは少ない。
実施形態1において、ボード面50または紙面60を区切る態様は、上述のように複数の区切りパターンの選択肢のいずれかをオブジェクト30の大きさに応じて選択して区切るものに限らず、区切りパターンを固定とするものでもよい。また、複数の区切りパターンを記憶しておき、ユーザーによるモードの選択に応じて、いずれかの区切りパターンを適用してボード面50または紙面60を区切るようにしてもよい。例えば、プレゼンテーションに適した第1モードと商談に適した第2モードとを設ける。そして、第1モードが選択された場合、図6の例のようにオブジェクト30として人体31を想定した上下に長い複数のエリア51〜53に区切り、第2選択された場合、図9の例のようにオブジェクト30として筆記具を持つ手を想定した大きさの複数のエリア61〜64に区切る。
オブジェクト30の大きさに応じて変更する場合も、固定とする場合も、区切りパターンは、図6、図8または図9に示した1×3、2×3または2×2のマトリクスに区切るパターンに限らない。1×2、1×4、2×4、3×1、3×2、3×3のマトリクスを含む任意のマトリクスに区切るパターンであってよい。ボード面50または紙面60を等分する必要はなく、例えばオブジェクト30の陰に隠れる部分とその周囲の所定のマージンを包含する最小の矩形のエリアとそれ以外のエリアに区切ることができる。複数のエリアのそれぞれの形状は、これらエリアの集合によってボード面50または紙面60の全域を網羅することができればよく、矩形以外の多角形または不定形であってもよい。
〔実施形態2〕
上述の実施形態1では、実際にボード面50に書込みが行なわれたかどうかを検出することなく、ボード面50のうちの撮影データを保存するエリアである対象エリアが設定された。これに対して、本実施形態2では、例えば図1に示される例と同様に使用される場合、ボード面50のうちの実際にボード面50に書込みが行なわれたエリアが検出され、検出されたエリアを所定の量だけ広げたエリアが対象エリアとして設定される。
〔実施形態2〕
上述の実施形態1では、実際にボード面50に書込みが行なわれたかどうかを検出することなく、ボード面50のうちの撮影データを保存するエリアである対象エリアが設定された。これに対して、本実施形態2では、例えば図1に示される例と同様に使用される場合、ボード面50のうちの実際にボード面50に書込みが行なわれたエリアが検出され、検出されたエリアを所定の量だけ広げたエリアが対象エリアとして設定される。
図11は、実施形態2に係るプロジェクター2の機能構成を示している。プロジェクター2は、実施形態1のプロジェクター1と同様に、図2に示されるハードウェア構成を有する。そして、プロジェクター2は、第一の検出部201、エリア設定部202、第二の検出部203、枠表示制御部204、および撮影制御部205を有する。これら要素は、CPU15(図2参照)がプログラムを実行することによって実現される機能要素である。
第一の検出部201は、ボード面50における書込みの行なわれた部分を検出する手段である。第一の検出部201は、ボード面50に書込みが行なわれている最中に、当該進行中の書込みによって色材の付着した部分(これを「書込み像」という)を検出する。書込み像の検出は、例えば次のように行なわれる。
第一の検出部201は、例えば1〜3秒程度の間隔でオブジェクトセンサー13を動作させ、動作させるごとにオブジェクトセンサー13から赤外線撮像データを取得して距離画像を作成する。第一の検出部201は、距離画像に基づいて、ボード面50に接近したオブジェクト30を検出する。そのようなオブジェクト30を検出すると、第一の検出部201は、オブジェクト30を検出する以前よりも短い間隔(例えば0.5〜1秒程度)で周期的にカメラ12にボード面50を撮影させ、最初の撮影像と最新の撮影像とを比較し、画素値の異なる部分(差分)を抽出する。このとき、比較の対象範囲を、オブジェクト30の位置の近傍に絞る。これにより、効率的に差分を抽出することができる。また、オブジェクト30がボード面50に書込みをし、その書込みからある程度以上離れた位置に新たに書込みをする場合、先の書込みと後の書込みとのそれぞれについて差分を抽出することができる。
撮影像にはオブジェクト30が映り込んでいる。そこで、第一の検出部203は、距離画像の解析または撮影像の画像認識によって、差分に含まれるオブジェクト30の像を特定する。そして、第一の検出部201は、差分からオブジェクト30の像を除いた残りを書込み像として検出する。
なお、差分の抽出、オブジェクト30の像の特定、および差分からのオブジェクト30の像の消去といった画像処理を画像処理部18が行なうように、第一の検出部201が画像処理部18を制御し、それによって第一の検出部201が書込み像を検出してもよい。
書込み像の面積は、書込みが進むにつれて大きくなる。例えば、ユーザーが文字列を書き込む場合、書き込んだ文字数が多くなるにつれて、書込み像の面積は大きくなる。また、書込み像の面積は、書込み像が部分的に消されると小さくなり、書込み像の全体が消されると0になる。書込み像の面積は、このように面積がユーザーの動作に応じて変化する。
第一の検出部201は、書込み像を周期的に検出する。そして、検出した書込み像のボード面50上の位置を検出結果として逐次にエリア設定部202に通知する。
エリア設定部202は、ボード面50のうちの撮影データを保存する処理の対象である対象エリアを設定する設定手段である。エリア設定部202は、第一の検出部201によって検出された書込み像を記録するため、第二の検出部203と連携しての対象エリアを設定する。設定の手順は次のとおりである。
エリア設定部202は、第一の検出部201から検出結果がはじめて通知されたとき、書込み像に対応した仮対象エリアを設定する。仮対象エリアは、書込み像を包含する最小の矩形のエリア(書込み像がこれの輪郭に内接する)を所定の拡張量の分だけ四方に拡張したものに相当する矩形のエリアである。四方のそれぞれの拡張量は、例えば書込み像の寸法(画素数)の5〜20%程度とする。書込み像のうちのオブジェクトの像と接する部分に対応する部位の拡張量については、書込み内容がオブジェクトで隠れている可能性のあることから、他の部位の拡張量よりも大きくするのがよい。
エリア設定部202は、第二の検出部203からオブジェクト30が仮対象エリア空間から出たとの通知を受けるまで、第一の検出部101からの2回目以降の検出結果の通知を受けるごとに、仮対象エリアを更新する。“仮対象エリア空間”とは、撮影空間40のうちのカメラ12と仮対象エリアとの間の部分である。第二の検出部203からオブジェクト30が仮対象エリア空間から出たとの通知を受けると、エリア設定部202は、その時点の仮対象エリアを対象エリアに設定する。
その後、対象エリアの設定から所定の待ち時間が経過するまでの期間内に、オブジェクト30が対象エリア空間に入ったとの通知を第二の検出部203から受けた場合、エリア設定部202は、仮対象エリアを対象エリアとした設定を解除する。すなわち、対象エリアを仮対象エリアに戻す。そして、この場合、エリア設定部202はその後の第一の検出部201からの検出結果に応じて仮対象エリアを更新する。
つまり、オブジェクト30が所定の待ち時間(例えば1〜5秒の範囲内の時間)よりも短い間隔で対象エリア空間に出入りする場合は、書込みが進行中であると考えられる。そこで、待ち時間が経過するまでの期間中には対象エリアを確定させず、オブジェクト30の移動に応じて仮対象エリアと対象エリアとの切替えを行なうように、プロジェクター2が制御される。
第二の検出部203は、撮影空間40におけるオブジェクト30の位置の変化を検出する検出手段である。第二の検出部203は、仮対象エリアがエリア設定部202によって設定された後、周期的にオブジェクト30の位置を特定する。その周期は、例えば第一の検出部201による書込み像の検出の周期と同じとされる。ただし、これに限るものではなく、書込み像の検出の周期よりも短くても長くてもよい。
第二の検出部203は、オブジェクト30の位置を特定するごとに、今回の位置と前回の位置とを比較することによって、仮対象エリア空間からオブジェクト30が出たこと、および対象エリア空間にオブジェクトが入ったことをそれぞれ検出する。そして、検出結果をエリア設定部202に通知する。
仮対象エリア空間からオブジェクト30が出たことは、仮対象エリアがオブジェクト30の陰に隠れない状態になったことに相当する。また、対象エリア空間にオブジェクト30が入ったことは、対象エリアがオブジェクト30の陰に隠れる状態になったことに相当する。対象エリア空間は、撮影空間40のうちのカメラ12と対象エリアとの間の部分である。
枠表示制御部204は、投影ユニット11に枠を表示させる手段である。枠表示制御部204は、エリア設定部202によって仮対象エリアが設定されたとき、仮対象エリアの輪郭を示す第一の色(例えば赤色)を枠をボード面50上に表示するように投影ユニット11を制御する。また、枠表示制御部204は、エリア設定部202によって対象エリアが設定されたとき、対象エリアの輪郭を示す第2の色(例えば青色)の枠を、第一の色の枠に代えてボード面50上に表示するように投影ユニット11を制御する。
撮影制御部205は、対象エリアに表示されている画像をカメラ12によって取得する取得手段である。撮影制御部205は、エリア設定部202によって対象エリアが設定されてから上述の待ち時間が経過したとき、ボード面50を撮影するようにカメラ12を制御する。
第一の色の枠が表示されることにより、プレゼンター8は、撮影によって記録することが予定されている書込み像を知ることができる。第二の色の枠が表示されることにより、プレゼンター8は、今まさに記録されようとしている書込み像を知ることができる。
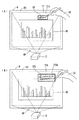
図12は、プロジェクター2による仮対象エリアの設定の一例を示している。図12(A)および(B)では、ユーザーがホワイトボード5に書込みをしている最中の様子が描かれている。図示された例において、プロジェクター2のカメラ12の視野は、ホワイトボード5の書込み可能な面であるボード面50の全域が撮影空間40に収まるように調整されている。
図12(A)では、画像90が投影されたボード面50に、既に文字列82が書き込まれている。ボード面50の一部が、ペンとそれを持つ手との組合せであるオブジェクト32の陰に隠れている。
文字列82が第一の検出部201によって書込み像として検出され、文字列82を包含する矩形の仮対象エリア71がエリア設定部202によって設定されている。そして、仮対象エリア71の大きさおよび位置を表示する枠710が投影されている。
図12(B)では、図12(A)で示された文字列82に文字を書き足した文字列82bが書き込まれている。文字列82よりも広い範囲にわたる文字列82bが第一の検出部201によって書込み像として検出され、文字列82bを包含するようにエリア設定部202によって仮対象エリア71bが設定されている。そして、仮対象エリア71bの大きさおよび位置を表示する枠710bが投影されている。
図12の(A)と(B)とを見比べて分かるように、書込み量が増えた場合、増える前の仮対象エリア71がそれよりも広い仮対象エリア71bに更新される。
図13は仮対象エリアの縮小の例を示す図である。
図13(A)では、ユーザーが文字列82bを書き込んだ段階でいったん書込みを止めて腕を右方へ移動させた様子が描かれている。仮対象エリア71bが設定されたままであり、枠710bが投影されている。オブジェクト32は、仮対象エリア71bの右側に存在し、そのほぼ全体が撮影空間40から出ている。
図13(B)では、ユーザーが文字列82bの一部を消している最中の様子が描かれている。ボード面50の右上半部の前に、イレーサーとそれを持つ手の組合せであるオブジェクト34が存在する。
既に文字列82bの右端部が消され、文字列82cが残っている。この残っている文字列82cが第一の検出部201によって書込み像として検出され、文字列82cを包含する仮対象エリア71cがエリア設定部202によって設定されている。そして、仮対象エリア71cの大きさおよび位置を表示する枠710cが投影されている。
図13の(A)と(B)とを見比べて分かるように、書込み量が減った場合、減る前の仮対象エリア71bがそれよりも狭い仮対象エリア71bに更新される。
図14はプロジェクター2によるボード面50の撮影の一例を示している。この例では、ボード面50の右上部に文字列82bを書き込んだユーザーが、続いてボード面50の右下部に書込みを行なう場面が想定されている。
図14では、文字列82bを包含する対象エリア71Aが既に設定され、対象エリア71Aを示す枠710Aが投影されている。また、ボード面50の右下部に文字列83が書き込まれており、文字列83を包含する仮対象エリア72が設定され、仮対象エリア72に対応する枠720が投影されている。オブジェクト32は、仮対象エリア72と接しているが、カメラ12と対象エリア71Aとの間の空間である対象エリア空間471から離れている。
対象エリア71Aが設定された後、オブジェクト32が対象エリア空間471の外に存在する状態が上述の待ち時間にわたって続いたとき、プロジェクター2のカメラ12によってボード面50の撮影が行なわれる。そして、対象エリア71Aの撮影データD771が実施形態1と同様に不揮発性メモリ17に保存される。撮影データD771は、ボード面50の撮影データから対象エリア71Aの映った部分を抽出する画像の切出しによって得られるデータである。
以上の実施形態2のプロジェクター2における処理の流れを、図15と図16とに示されるフローチャートを参照しながらまとめる。
プロジェクター2は、パーソナルコンピューター7(図1参照)からの指示に従って、パーソナルコンピューター7から与えられる画像90をホワイトボード5に投影する(図15のS20)。
撮影空間40の中にオブジェクト30が有る場合(S21でYES)、第一の検出部201が書込み像を検出するための上述の処理を実行する(S22)。詳しくは、撮影空間40の中にオブジェクト30が入ったことを検出したときから、周期的に処理を実行する。書込みが行なわれない場合には、当然、ステップS22において書込み像は検出されない。書込み像を検出した場合、第一の検出部201はエリア設定部202に書込み像の位置を通知する。
以前に検出されていなかった書込み像の位置が第一の検出部201から通知されたとき、エリア設定部202は、その書込み像を包含する仮対象エリアを設定する(S23)。そして、枠表示制御部204が設定されている仮対象エリアの大きさおよび位置を示す第一の色(例えば赤色)の枠を投影するように投影ユニット11を制御する(S24)。複数の仮対象エリアが設定されている場合、それらのそれぞれに対応する枠が表示される。
その後、エリア設定部202は、書込み像の位置が第一の検出部201から通知されるごとに、必要に応じて仮対象エリアを拡大または縮小する(S25)。つまり、書込みが続いたり消されたりするのに応じて、仮対象エリアを更新する。このような仮対象エリアの更新は、オブジェクト30が仮対象エリア空間から出たことが第二の検出部203によって検出されない期間において(S26でNO)、第一の検出部201によって書込み像が検出されるごとに行なわれる。
オブジェクト30が仮対象エリア空間から出たことが第二の検出部203によって検出されると(S26でYES)、フローは図16のステップS27へ進み、エリア設定部202が当該仮対象エリア空間に対応する仮対象エリアを対象エリアに変更する。すなわち、仮対象エリアをそのまま対象エリアに設定する。枠表示制御部204は、対象エリアの大きさおよび位置を表示する第二の色(例えば青色)の枠を投影するよう投影ユニット11を制御する(S28)。
対象エリアが設定されたとき、第二の検出部203が計時を開始し、待ち時間内にオブジェクト30が対象エリア空間に入ったかどうかをチェックする(S29)。待ち時間内にオブジェクト30が対象エリア空間に入る場合として、例えば「ユーザーが対象エリアの書込みに追記したり、書込みを修正または消去したりしようとして対象エリアに近づく」という場合が考えられる。
オブジェクト30が対象エリア空間に入ったことが第二の検出部203によって検出された場合(S29でYES)、エリア設定部202は、書込み像がユーザーによって変更される可能性があると判断して、対象エリアを仮対象エリアに戻す(S33)。この場合、フローは、図16のステップS33から図15のステップS24へ戻る。
一方、対象エリアが設定された後、待ち時間内にオブジェクト30が当該対象エリアに対応する対象エリア空間に入らなかった場合、ステップS29のチェック結果はNOとなる。ステップS29のチェック結果がNOであった場合、撮影制御部205がカメラ12にボード面50を撮影させる(S30)。そして、撮影制御部205は、カメラ12によって得られた撮影データから対象エリアに対応する部分を抽出して不揮発性メモリ17に格納する(S31)。つまり、対象エリアの撮影データを保存する。
撮影データの保存に際して、撮影制御部205は、撮影データと画像90とを対応づける処理として、例えば画像90の識別情報を撮影データに付加する。また、撮影データがボード面50内のどこに対応するかが分かるように、ボード面50における対象エリアの位置を特定する位置情報を撮影データに付加する。さらに、一つの画像90の表示中に複数個所に書込みが行なわれる場合に、書込みの順序が分かるように、保存する複数の撮影データの時系列を特定する情報(例えば撮影時刻)を撮影データに付加する。
撮影された対象エリアについて、エリア設定部202はこのエリアを対象エリアとした設定を解除する。仮対象エリアに変更することもしない。
パーソナルコンピューター7から画像の切替えまたは投光の終了が指示されるまで、画像90の投影が続く。プロジェクター2は、画像90の投影が終了したかどうかをチェックし(S32)、投影が終了していない場合(S32でNO)、ステップS21に戻って画像90の表示中の書込みの内容を記録するための一連の処理(S21〜S33)を続ける。画像90の投影が終了した場合(S32でYES)、プロジェクター3は、図15および図16に示される動作を終了する。
なお、画像の切替え指示に従って画像90の投影を終了した場合、画像90に代わって表示される画像の表示中の書込みの内容を記録するため、改めてステップS20〜S33を実行する。
以上の実施形態2によると、実施形態1と同様の効果が得られる。すなわち、プレゼンター8は、ホワイトボード5に書込みをした後、仮対象エリアを隠さない位置まで移動するだけで書込みの内容を記録させることができ、ボード面50を隠さない位置まで大きく移動する必要がない。
また、実施形態2では、実際に書込みが行なわれたエリアの撮影データを保存するので、書込みの行なわれていないエリアの撮影データを保存してしまうという無駄な動作がない。
実施形態1、2において、オブジェクト30の検出に係る測距の方法は、TOF法に限らない。例えば、視点の異なる二つの撮影像を比較して被写体の視差を求め、三角測量の手法で視点からオブジェクト30までの距離を算出してもよい。その場合、オブジェクトセンサー13として、発光素子と二つの撮像デバイスを有するセンサーを用いる。
撮影空間40,42内のオブジェクト30の大きさおよび三次元位置の特定を、カメラ12で撮影したボード面50または紙面60の撮影像に基づく画像認識によって行なうようにしてもよい。三次元位置の特定については、撮影像内のオブジェクト30の部分とオブジェクトの影の部分との距離を、オブジェクト30とボード面50または紙面60との距離に換算する方法がある。
対象エリアの撮影データを不揮発性メモリ17に格納した後にまたは格納せずに、当該撮影データをパーソナルコンピューター7へ転送することができる。ボード面50または紙面60の撮影データから対象エリアの撮影データD511,D531,D521,D521,D512,D571,D521,D621,D711を切り出す際に、枠510,520,530,710Aの内側の範囲を切り出して書込み像を記録するようにしてもよいし、枠510,520,530,710Aを含めて切り出して、枠510,520,530,710Aに囲まれた書込み像を記録するようにしてもよい。書込み像は文字列80,82,82b,83に限らず、線、図形、またはこれらと文字との組合せでもよい。
ボード面50,60の全体を撮影して対象エリアの撮影データD511,D531,D521,D521,D512,D571,D521,D621,D711を抽出するのに代えて、対象エリアを選択的に視野に収めるズーミングを行なって撮影し、それによって対象エリアの撮影データを得ることができる。カメラ12からその受光面に並ぶ受光素子のうちの対象エリアに対応する受光素子の出力を選択的に取り出してもよい。
実施形態2において、仮対象エリアに対応する枠と対象エリアに対応する枠とを色分けする代わりに、輝度または模様を異ならせてこれらを区別することができる。枠を表示するモードと表示しないモードとを設け、プロジェクター2のユーザーが適宜これらモードの一方を選択できるようにしてもよい。枠の表示に代えてまたは枠の表示と合わせて、仮対象エリアおよび対象エリアのそれぞれの輝度または背景色を当該エリアの周囲の輝度または背景色と異ならせることも可能である。仮対象エリアと対象エリアとにそれぞれ異なる地紋を付すこともできる。
実施形態2において、撮影された対象エリア内の書込み像の位置を記憶しておき、第一の検出部201が、記憶している位置またはその近傍に在る書込み像を検出した場合、検出した書込み像と記憶している位置の像とを合わせた像を包含するエリアの位置をあらたな書込み像の検出結果としてエリア設定部202に通知するようにえもよい。そうすることにより、以前の書込みに書き足す書込みが行なわれた場合、書き足された部分だけでなく、書き足された書込みの全体を記録することができる。
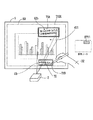
実施形態1、2では、投影ユニット11とカメラ12とが一体化されたプロジェクター1,2を挙げたが、画像を投影する表示手段と投影面を撮影する撮影手段とが図17に示されるシステム構成のように二つの装置の一方と他方とに分かれた場合にも、本発明を適用することができる。
図17において、投影と撮影とを行なうシステム3は、携帯型のプロジェクター3Aとカメラ(撮影手段)を備えた携帯型の情報端末3Bとから構成される。情報端末3Bは例えばスマートフォンである。
プロジェクター3Aは、例えば机の上に書込みの可能なスクリーンとして置かれた紙6に画像を投影する。プロジェクター3Aは、紙6を見下ろす位置に配置され、プロジェクター2Aによる投光の範囲は紙6の紙面60の一部を投影面60Aとして用いるように調整されている。
情報端末3Bは紙6を撮影する。情報端3Bも紙6を見下ろす位置に配置され、情報端3Bのカメラの視野は書き込みされる可能性のある紙面60の全域を撮影することができるように調整されている。
システム3において、上述の実施形態1のプロジェクター1と同様の機能、または実施形態2のプロジェクター2と同様の機能を実現することができる。プロジェクター1と同様の機能を実現する場合、システム3は、図5に示した第一の検出部101、エリア設定部102、第二の検出部103、枠表示制御部104、および撮影制御部105と同等の機能要素を有する。また、プロジェクター2と同様の機能を実現する場合、システム3は、
図11に示した第一の検出部201、エリア設定部202、第二の検出部203、枠表示制御部204、および撮影制御部205と同等の機能要素を有する。
図11に示した第一の検出部201、エリア設定部202、第二の検出部203、枠表示制御部204、および撮影制御部205と同等の機能要素を有する。
プロジェクター1と同様の機能を実現する場合もプロジェクター2と同様の機能を実現する場合も、複数の機能要素の一部をプロジェクター3Aに設け、残りの機能要素を情報端末3Bに設けることができる。例えば、枠表示制御部104,204をプロジェクター3Aに設け、残りの第一の検出部101,201、エリア設定部102,202、第二の検出部103,203、および撮影制御部105,205を情報端末3Bに設けることができる。
プロジェクター1,3およびシステム2の構成、動作、形状、用途などは本発明の趣旨に沿う範囲で適宜変更することができる。オブジェクト30の有無、オブジェクト30の位置の変化、または書込み像を検出する周期は、例として挙げた値に限らず、プロジェクター1,3およびシステム2の用途に応じて最適化することができる。例えば、実施形態1において、オブジェクト30の有無の検出の周期を長めに選定することで、実際には書込みの行なわれていないエリアの撮影データを記録するのを低減することができる。
1,2 プロジェクター(撮影システム)
11 投影ユニット(表示手段)
12 カメラ(撮影手段)
101,201 第一の検出部
103,203 第二の検出部(検出手段)
102,202 エリア設定部(分割エリア設定手段)
104,204 枠表示制御部
105,205 撮影制御部(取得手段)
50 ボード面(面)
60 紙面(面)
8 プレゼンター(物体)
30,31,32,33,34 オブジェクト(物体)
40 撮影空間(空間)
471 対象エリア空間(第二の空間)
510,520,530,710,710b、710c、720 枠(識別画像)
710A 枠(識別画像)
D511,D531,D521,D521,D512 撮影データ(画像)
D571,D521,D621,D711 撮影データ(画像)
51〜59 エリア(分割エリア)
61〜64 エリア(分割エリア)
71A 対象エリア(エリア)
71,71b,71c,72 仮対象エリア(第二のエリア)
82,82b、82c 文字列(第三のエリア)
15 CPU(コンピューター)
3 システム(撮影システム)
3A プロジェクター
3B 情報端末(コンピューター)
42 撮影空間(空間)
11 投影ユニット(表示手段)
12 カメラ(撮影手段)
101,201 第一の検出部
103,203 第二の検出部(検出手段)
102,202 エリア設定部(分割エリア設定手段)
104,204 枠表示制御部
105,205 撮影制御部(取得手段)
50 ボード面(面)
60 紙面(面)
8 プレゼンター(物体)
30,31,32,33,34 オブジェクト(物体)
40 撮影空間(空間)
471 対象エリア空間(第二の空間)
510,520,530,710,710b、710c、720 枠(識別画像)
710A 枠(識別画像)
D511,D531,D521,D521,D512 撮影データ(画像)
D571,D521,D621,D711 撮影データ(画像)
51〜59 エリア(分割エリア)
61〜64 エリア(分割エリア)
71A 対象エリア(エリア)
71,71b,71c,72 仮対象エリア(第二のエリア)
82,82b、82c 文字列(第三のエリア)
15 CPU(コンピューター)
3 システム(撮影システム)
3A プロジェクター
3B 情報端末(コンピューター)
42 撮影空間(空間)
Claims (11)
- 面を撮影する撮影手段と、
物体の、前記面と前記撮影手段との間の空間における位置の変化を検出する、検出手段と、
前記検出手段によって前記変化が検出された場合に、前記面における、前記撮影手段から前記物体によって当該変化の前は見えなかったが当該変化の後に見えるようになったエリアの画像を、当該撮影手段によって取得する、取得手段と、
を有することを特徴とする撮影システム。 - 前記物体が前記空間に占めるサイズに応じて前記面を複数の分割エリアに区切る分割エリア設定手段、を有し、
前記取得手段は、前記変化として、前記物体が前記複数の分割エリアのうちの1つと前記撮影手段との間の第二の空間から出たことが前記検出手段によって検出された場合に、当該1つの分割エリアを前記エリアとして前記画像を取得し、
前記分割エリア設定手段は、前記物体が前記空間に入った場合、および、前記物体が前記第二の空間から前記複数の分割エリアのうちの他の1つと前記撮影手段との間の第三の空間へ移動した場合に、前記面を区切り直す、
請求項1に記載の撮影システム。 - 前記面は、複数の分割エリアに区切られており、
前記取得手段は、前記変化として、前記物体が前記複数の分割エリアのうちの1つと前記撮影手段との間の第二の空間から出たことが前記検出手段によって検出された場合に、当該1つの分割エリアを前記エリアとして前記画像を取得する、
請求項1に記載の撮影システム。 - 前記複数の分割エリアのうちの前記物体によって前記撮影手段から見えない分割エリアを指し示す識別画像を前記面に表示する表示手段、を有する、
請求項2または請求項3に記載の撮影システム。 - 前記表示手段は、さらに、前記物体が前記第二の空間から出たことが前記検出手段によって検出された場合に、前記複数の分割エリアのうちの当該第二の空間に係る分割エリアを指し示しかつ前記識別画像とは異なる第二の識別画像を、前記面に表示する、
請求項4に記載の撮影システム。 - 面における書込みを検出する書込み検出手段、を有し、
前記取得手段は、前記変化として、前記書込みを含む一部分である第二のエリアと前記撮影手段との間の第二の空間から出たことが前記検出手段によって検出された場合に、当該第二のエリアを前記エリアとして前記画像を取得する、
請求項1に記載の撮影システム。 - 前記検出手段は、定期的に前記書込みを検出し、
前記第二のエリアは、前記書込みが内接する第三のエリアを所定の量だけ広げたものである、
請求項5に記載の撮影システム。 - 前記第二のエリアを表わす識別画像を前記面に表示する表示手段、を有する、
請求項6または請求項7に記載の撮影システム。 - 前記表示手段は、さらに、前記物体が前記第二の空間から出たことが前記検出手段によって検出された場合に、前記第二のエリアを指し示しかつ前記識別画像とは異なる第二の識別画像を、前記面に表示する、
請求項8に記載の撮影システム。 - 面を撮影する撮影手段を使用する撮影の方法であって、
物体の、前記面を前記撮影手段との間の空間における位置の変化を検出する第一のステップと、
前記第一のステップによって前記変化が検出された場合に、前記面における、前記撮影手段から前記物体によって当該変化の前は見えなかったが当該変化の後に見えるようになったエリアの画像を、当該撮影手段によって取得する第二のステップと、
を有することを特徴とする撮影の方法。
方法 - 面を撮影する撮影手段を制御するコンピューターに用いられるコンピュータープログラムであって、
前記コンピューターに、
物体の、前記面と前記撮影手段との間の空間における位置の変化を検出する第一の処理を実行させ、
前記第一の処理によって前記変化が検出された場合に、前記面における、前記撮影手段から前記物体によって当該変化の前は見えなかったが当該変化の後に見えるようになったエリアの画像を取得するように、当該撮影手段を制御する第二の処理を実行させる
ことを特徴とするコンピュータープログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014128508A JP2016009266A (ja) | 2014-06-23 | 2014-06-23 | 撮影システム、撮影の方法、およびコンピュータープログラム |
| CN201510346729.9A CN105323463A (zh) | 2014-06-23 | 2015-06-19 | 拍摄系统以及拍摄的方法 |
| US14/746,027 US20150373283A1 (en) | 2014-06-23 | 2015-06-22 | Photographing system, photographing method, and computer-readable storage medium for computer program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014128508A JP2016009266A (ja) | 2014-06-23 | 2014-06-23 | 撮影システム、撮影の方法、およびコンピュータープログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016009266A true JP2016009266A (ja) | 2016-01-18 |
Family
ID=54870833
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014128508A Pending JP2016009266A (ja) | 2014-06-23 | 2014-06-23 | 撮影システム、撮影の方法、およびコンピュータープログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20150373283A1 (ja) |
| JP (1) | JP2016009266A (ja) |
| CN (1) | CN105323463A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240078007A1 (en) * | 2019-10-17 | 2024-03-07 | Sony Group Corporation | Information processing apparatus, information processing method, and program |
| US12236147B2 (en) | 2022-06-20 | 2025-02-25 | Toyota Jidosha Kabushiki Kaisha | System and terminal apparatus |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018163977A1 (ja) * | 2017-03-08 | 2018-09-13 | ソニー株式会社 | 画像処理装置および画像処理方法 |
| JP2018159840A (ja) * | 2017-03-23 | 2018-10-11 | キヤノン株式会社 | 画像投影装置とその制御方法、プログラム及び記憶媒体 |
| JP7192792B2 (ja) * | 2017-12-22 | 2022-12-20 | ソニーグループ株式会社 | 情報処理装置、情報処理方法及びプログラム |
| JP2020144413A (ja) * | 2019-03-04 | 2020-09-10 | セイコーエプソン株式会社 | 表示方法および表示装置 |
| CN114631323B (zh) * | 2019-11-05 | 2024-09-17 | 巴科股份有限公司 | 区划适应性视频生成 |
| TWI711947B (zh) * | 2019-11-12 | 2020-12-01 | 奇勤科技股份有限公司 | 電子書寫紀錄連結影片播放時間的資訊處理方法及錄影裝置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006162692A (ja) * | 2004-12-02 | 2006-06-22 | Hosei Univ | 講義コンテンツ自動作成システム |
| JP2008027080A (ja) * | 2006-07-19 | 2008-02-07 | Casio Comput Co Ltd | プレゼンテーションシステム |
| JP2010092224A (ja) * | 2008-10-07 | 2010-04-22 | Canon Inc | 画像処理装置及び画像処理方法 |
| JP2011123895A (ja) * | 2009-12-11 | 2011-06-23 | Sharp Corp | 情報処理装置、情報処理システム、情報処理方法、情報処理プログラム及びコンピュータ読み取り可能な記録媒体 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5592607A (en) * | 1993-10-15 | 1997-01-07 | Xerox Corporation | Interactive method and system for producing address-correlated information using user-specified address zones |
| US20060092178A1 (en) * | 2004-10-29 | 2006-05-04 | Tanguay Donald O Jr | Method and system for communicating through shared media |
| JP4695645B2 (ja) * | 2005-06-30 | 2011-06-08 | 株式会社リコー | 投影画像表示装置 |
| US9696808B2 (en) * | 2006-07-13 | 2017-07-04 | Northrop Grumman Systems Corporation | Hand-gesture recognition method |
| CN101464745B (zh) * | 2007-12-17 | 2012-07-18 | 北京汇冠新技术股份有限公司 | 一种背投光源式触摸识别装置及其触摸识别方法 |
| CN101650520A (zh) * | 2008-08-15 | 2010-02-17 | 索尼爱立信移动通讯有限公司 | 移动电话的可视激光触摸板和方法 |
| JP6217058B2 (ja) * | 2012-05-09 | 2017-10-25 | セイコーエプソン株式会社 | 画像表示システム |
| JP6095283B2 (ja) * | 2012-06-07 | 2017-03-15 | キヤノン株式会社 | 情報処理装置、およびその制御方法 |
| US9164596B1 (en) * | 2012-10-22 | 2015-10-20 | Google Inc. | Method and apparatus for gesture interaction with a photo-active painted surface |
| US20150193088A1 (en) * | 2013-07-15 | 2015-07-09 | Intel Corporation | Hands-free assistance |
-
2014
- 2014-06-23 JP JP2014128508A patent/JP2016009266A/ja active Pending
-
2015
- 2015-06-19 CN CN201510346729.9A patent/CN105323463A/zh active Pending
- 2015-06-22 US US14/746,027 patent/US20150373283A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006162692A (ja) * | 2004-12-02 | 2006-06-22 | Hosei Univ | 講義コンテンツ自動作成システム |
| JP2008027080A (ja) * | 2006-07-19 | 2008-02-07 | Casio Comput Co Ltd | プレゼンテーションシステム |
| JP2010092224A (ja) * | 2008-10-07 | 2010-04-22 | Canon Inc | 画像処理装置及び画像処理方法 |
| JP2011123895A (ja) * | 2009-12-11 | 2011-06-23 | Sharp Corp | 情報処理装置、情報処理システム、情報処理方法、情報処理プログラム及びコンピュータ読み取り可能な記録媒体 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240078007A1 (en) * | 2019-10-17 | 2024-03-07 | Sony Group Corporation | Information processing apparatus, information processing method, and program |
| US12154305B2 (en) * | 2019-10-17 | 2024-11-26 | Sony Group Corporation | Information processing apparatus and information processing method |
| US12236147B2 (en) | 2022-06-20 | 2025-02-25 | Toyota Jidosha Kabushiki Kaisha | System and terminal apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105323463A (zh) | 2016-02-10 |
| US20150373283A1 (en) | 2015-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016009266A (ja) | 撮影システム、撮影の方法、およびコンピュータープログラム | |
| US9609221B2 (en) | Image stabilization method and electronic device therefor | |
| EP3092790B1 (en) | Adaptive camera control for reducing motion blur during real-time image capture | |
| JP5822400B2 (ja) | カメラとマーク出力とによるポインティング装置 | |
| EP3236650A1 (en) | Method and device for controlling a camera | |
| JP6289003B2 (ja) | 情報処理装置及びその制御方法、プログラム | |
| JP6079695B2 (ja) | 画像表示撮影システム、撮影装置、表示装置、画像の表示および撮影の方法、およびコンピュータープログラム | |
| EP3142351B1 (en) | Shooting method and device | |
| US9300876B2 (en) | Fill with camera ink | |
| CN106034206B (zh) | 电子设备及图像显示方法 | |
| US8704929B2 (en) | System and method for user guidance of photographic composition in image acquisition systems | |
| CN101562703A (zh) | 用于在成像设备内执行基于触摸的调整的方法和装置 | |
| WO2016026466A1 (zh) | 一种光绘图像的优化方法及装置 | |
| WO2016188185A1 (zh) | 照片处理方法及装置 | |
| CN103391396B (zh) | 显示控制设备和显示控制方法 | |
| KR102944953B1 (ko) | 촬영 방법, 장치 및 전자기기 | |
| US20160353021A1 (en) | Control apparatus, display control method and non-transitory computer readable medium | |
| JP2006072669A (ja) | 画像処理装置、ゲーム装置および画像処理方法 | |
| US9626782B2 (en) | Image processing apparatus, image processing method and computer-readable storage medium | |
| KR20210101087A (ko) | 전자 장치 및 그 전자 장치에서 영상을 표시하는 방법 | |
| CN105611108A (zh) | 一种信息处理方法及电子设备 | |
| JP2021129293A (ja) | 画像処理装置、画像処理システム、画像処理方法およびプログラム | |
| JP2017162148A (ja) | 情報処理装置、プログラム、情報処理方法 | |
| JP2014109662A (ja) | 表示制御装置及びその制御方法 | |
| JP7264675B2 (ja) | 処理装置、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161108 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170711 |