JP2016012977A - 移動体搬送装置および移動体駆動装置 - Google Patents
移動体搬送装置および移動体駆動装置 Download PDFInfo
- Publication number
- JP2016012977A JP2016012977A JP2014133087A JP2014133087A JP2016012977A JP 2016012977 A JP2016012977 A JP 2016012977A JP 2014133087 A JP2014133087 A JP 2014133087A JP 2014133087 A JP2014133087 A JP 2014133087A JP 2016012977 A JP2016012977 A JP 2016012977A
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- guide member
- diameter side
- side stator
- mobile body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Jigging Conveyors (AREA)
Abstract
【課題】超音波モータのメカニズムを用いて、移動体を良好に搬送したり駆動したりできる移動体搬送装置を提供する。
【解決手段】移動体搬送装置は、上面に載置された移動体を所定方向に搬送する移動体搬送装置であって、第1のガイド部材と、第1のガイド部材とともに移動体の搬送路を形成する第2のガイド部材と、を備え、第1のガイド部材及び第2のガイド部材は、移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて移動体を搬送することを特徴とする。
【選択図】図1
【解決手段】移動体搬送装置は、上面に載置された移動体を所定方向に搬送する移動体搬送装置であって、第1のガイド部材と、第1のガイド部材とともに移動体の搬送路を形成する第2のガイド部材と、を備え、第1のガイド部材及び第2のガイド部材は、移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて移動体を搬送することを特徴とする。
【選択図】図1
Description
本技術は、超音波モータのメカニズムを用いて球体などの移動体を搬送する移動体搬送装置および移動体を駆動する移動体駆動装置に関する。
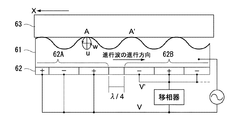
図13に示すように、超音波モータは、導電性弾性体からなるステータ61に貼り付けられた圧電セラミック62の2組の電極領域62A、62Bに所定の位相差をもった高周波電圧V、V'が印加されることによってステータ61に2つの定在波を合成した進行波を発生させる。このステータ61の上面にローター63を加圧接触させることによって、ローター63は進行波の方向と逆方向に搬送する。
すなわち、進行波は縦波と横波を伴っている。ステータ61のローター63と加圧接触する上面の点Aに着目すると、点Aは縦振幅uと横振幅wで反時計周り方向の楕円運動をする。ローター63の加圧接触面は進行波の波頭でステータの複数の点A,A'・・・と接触することによって、進行波の進行方向とは逆の矢符X方向に移動される。
上述したような超音波モータのメカニズムを、回転の動力を得る用途ではなく、球体などの曲面をもった移動体の搬送に用いたり、定点回転などの駆動の用途に利用したりするための研究開発が現在本発明者らによって進められている。超音波モータは、電磁モータのように磁力遮蔽処理を行う必要が無いため、特に、磁性体の搬送や駆動に適しており、例えば、遊技機における球体の搬送や、球体の動きを伴う演出などへの利用が期待されている。あるいは、電子部品をはじめとする様々な工業用部品の搬送などへの利用の期待も大きい。
しかしながら、一般的な超音波モータのローターを球体などの曲面を有する移動体に置き換えただけの構造では、曲面を有し、回転方向について拘束を受けていない移動体がステータの振動面から接線方向の駆動力を受けても、移動体の回転力に変換されてしまい、重心周りに回転(定点回転)するだけで移動しない。
さらに、遊技機における球体の搬送や、球体の動きを伴う演出などへの利用を想定した場合、移動体の曲面をステータの振動面に一点で加圧接触させただけの構成では、球体の搬送や定点回転など、異なる動きを自在に切り替えることができない。
以上のような事情に鑑み、本技術の目的は、超音波モータのメカニズムを用いて、移動体を良好に搬送したり自在に駆動したりすることのできる移動体搬送装置および移動体駆動装置を提供することにある。
上記の課題を解決するために、本技術に係る第1の形態の移動体搬送装置は、上面に載置された移動体を所定方向に搬送する移動体搬送装置であって、第1のガイド部材と、前記第1のガイド部材とともに前記移動体の搬送路を形成する第2のガイド部材と、を備え、前記第1のガイド部材及び第2のガイド部材は、前記移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて前記移動体を搬送することを特徴とする。
この移動体搬送装置によれば、移動体が、搬送路を形成する第1のガイド部材と第2のガイド部材の計2点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて移動体を搬送するように構成したので、移動体を定点回転させることなく良好に搬送することができる。
本発明の移動体搬送装置において、前記移動体は、第1及び第2のガイド部材と点で当接される面が曲面であるものであってよい。
本発明の移動体搬送装置において、前記移動体は、球体であり、自重によって、前記第1及び第2のガイド部材との圧接力を得るものであってよい。これにより、移動体をガイド部材に押し付ける構成が不要であるので、移動体搬送装置を小型、軽量化することができる。
本発明の移動体搬送装置において、前記搬送路は、円環状、直線状、またこれらの組み合わせであってよい。
本技術に係る第2の形態の移動体駆動装置は、上面に載置された移動体に駆動力を印加する移動体駆動装置であって、第1のガイド部材と、前記第1のガイド部材とともに前記移動体の搬送路を形成する第2のガイド部材と、を備え、前記第1のガイド部材及び第2のガイド部材は、前記移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて前記移動体を駆動することを特徴とする。
以上のように、本技術によれば、超音波モータのメカニズムを用いて、移動体を良好に搬送したり自在に駆動したりすることができる。
以下、本技術に係る実施形態を、図面を参照しながら説明する。
<第1の実施形態>
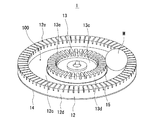
図1は、本技術の第1の実施形態である移動体搬送装置の構成を示す斜視図である。
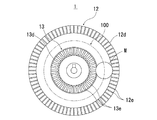
図2は、図1の移動体搬送装置の平面図である。
図3は、図1の移動体搬送装置の縦断面図である。
図1は、本技術の第1の実施形態である移動体搬送装置の構成を示す斜視図である。
図2は、図1の移動体搬送装置の平面図である。
図3は、図1の移動体搬送装置の縦断面図である。
これらの図に示すように、この移動体搬送装置1は、超音波モータのメカニズムを用いて、球体などの曲面を有する移動体Mを搬送したり駆動したりする装置である。移動体Mは、従来例として示した超音波モータのローターに相当するものとして、ステータに励振された進行波によって進行波の進行方向と逆方向に移動されて搬送される。また、この移動体搬送装置1は、移動体Mを、搬送路上の任意の位置に固定したまま回転(定点回転)させるなど、駆動させることもできる。
[移動体搬送装置の構成]
次に、この移動体搬送装置の構成を詳細に説明する。
符号11は略円盤状のベース部材である。ベース部材11には、外径側ステータ12(第1のガイド部材に相当する。)および内径側ステータ13(第2のガイド部材に相当する。)がそれぞれ固定されている。
次に、この移動体搬送装置の構成を詳細に説明する。
符号11は略円盤状のベース部材である。ベース部材11には、外径側ステータ12(第1のガイド部材に相当する。)および内径側ステータ13(第2のガイド部材に相当する。)がそれぞれ固定されている。
ベース部材11の上面側には円柱状の第1の突出部11aが形成され、さらに第1の突出部11aの上面側には、第1の突出部よりも径の小さい円柱状の第2の突出部11bが第1の突出部11aに対して同心的に形成されている。なお、第1の突出部11aおよび第2の突出部11bは円柱状でなくてもよい。例えば、角柱形状であってもよい。
外径側ステータ12の中央部には第1の固定穴12aが形成されている。この第1の固定穴12aにベース部材11の第1の突出部11aが挿入された状態で、外径側ステータ12がベース部材11に固定されている。
外径側ステータ12は、上記の第1の固定穴12aとともにベース部材11に固定される部位である第1のベース固定部12bを備える。外径側ステータ12の第1のベース固定部12bより外周側には、第1の連結部12cおよび第1の振動部12dが順に形成されている。
第1の連結部12cは、外径側ステータ12において第1のベース固定部12bと第1の振動部12dとを連結する部位である。
第1の振動部12dの下面には第1の圧電セラミック14が貼り付けられている。第1の振動部12dの上面にはくし歯状の多数の溝12eが形成されている。すなわち、第1の振動部12dは、第1の圧電セラミック14の駆動によって進行波が励振され、移動体Mが一点で加圧接触する部位である。溝12eは第1の振動部12dの上面の楕円運動の振幅を拡げるためのものである。
また、内径側ステータ13の中央部には第1の固定穴12aよりも小径の第2の固定穴13aが形成されており、この第2の固定穴13aにベース部材11の第2の突出部11bが挿入された状態で、内径側ステータ13がベース部材11に固定されている。
内径側ステータ13は、上記の第2の固定穴13aとともにベース部材11に固定される部位である第2のベース固定部13bを備える。第2のベース固定部13bより外周側には、第2の連結部13cおよび第2の振動部13dが順に形成されている。
第2の連結部13cは、内径側ステータ13において第2のベース固定部13bと第2の振動部13dとを連結する部位である。
第2の振動部13dの下面には第2の圧電セラミック15が貼り付けられている。第2の振動部13dの上面にはくし歯状の多数の溝13eが形成されている。すなわち、第2の振動部13dは、第2の圧電セラミック15の駆動によって進行波が励振され、移動体Mが一点で加圧接触する部位である。溝13eは第2の振動部13dの上面の楕円運動の振幅を拡げるためのものである。
外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dは、それぞれの厚み方向において上端が略同一の高さに揃えられている。また、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dは半径方向に所定の距離を隔てた位置関係となるように互いに同心円状に形成されている。すなわち、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dとによって、移動体Mを搬送する円環状の搬送路100が形成されている。
なお、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dの各々の上端は、必ずしも同じ高さに揃えられている必要はなく、高さ方向においてずれていてもよい。
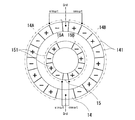
図4は、外径側ステータ12の第1の圧電セラミック14および内径側ステータ13の第2の圧電セラミック15の分極パターンを示す図である。
外径側ステータ12の第1の圧電セラミック14には、第1の電極領域14Aと第2の電極領域14Bが設けられている。第1の圧電セラミック14に印加される交流電圧の波長をλ1として、第1の電極領域14Aと第2の電極領域14Bは円周方向においてλ1/4相当の距離隔てて配置されている。第1の電極領域14Aと第2の電極領域14Bはさらに円周方向においてλ1/2相当の長さの例えば8個の小電極領域141に区分されている。各々の小電極領域141は厚み方向に逆極性に分極され、かつ隣り合う小電極領域141間で分極の向きは逆さまとされている。第1の圧電セラミック14の各々の小電極領域141の表面には駆動電極(図示せず)が形成されている。
外径側ステータ12をグランドとして、第1の圧電セラミック14の第1の電極領域14Aには外径側ステータ12(外径側ステータ12と第1の圧電セラミック14との組み合わせ)の固有振動数に等しいあるいは略等しい周波数の第1の駆動交流電圧が印加され、第2の電極領域には、第1の駆動交流電圧に対して位相がλ1/4だけずれた同じ周波数の第2の駆動交流電圧が印加される。
内径側ステータ13の第2の圧電セラミック15にも、同様の第1の電極領域15Aと第2の電極領域15Bが設けられている。第2の圧電セラミック15に印加される交流電圧の波長をλ2として、第1の電極領域15Aと第2の電極領域15Bは円周方向においてλ2/4相当の距離隔てて配置されている。第1の電極領域15Aと第2の電極領域15Bはさらに円周方向においてλ2/2相当の長さの例えば4個の小電極領域151に区分されている。各々の小電極領域151は厚み方向に逆極性に分極され、かつ隣り合う小電極領域間で分極の向きは逆さまとされている。第2の圧電セラミックの各々の小電極領域151の表面には駆動電極(図示せず)が形成されている。
内径側ステータ13をグランドとして、第2の圧電セラミック15の第1の電極領域15Aには内径側ステータ13(内径側ステータ13と第2の圧電セラミック15との組み合わせ)の固有振動数に等しいあるいは略等しい周波数の第3の駆動交流電圧が印加され、第2の電極領域15Bには、第3の駆動交流電圧に対して位相がλ2/4だけずれた同じ周波数の第4の駆動交流電圧が印加される。
図5は、本実施形態の移動体搬送装置1の駆動制御系の構成を示すブロック図である。
本実施形態の移動体搬送装置1は、外径側ステータ12の駆動回路20と内径側ステータ13の駆動回路30と、コントローラ40を備える。
外径側ステータ12の駆動回路20は、駆動周波数(波長λ1)を発振する発振回路21と、発振回路21より発振された周波数信号の位相をシフトさせる移相回路22と、発振回路21より発振された周波数信号を増幅して第1の圧電セラミック14の第1の電極領域14Aに第1の駆動交流電圧として印加する第1の増幅回路23と、移相回路22より出力された周波数信号を増幅して第1の圧電セラミック14の第2の電極領域14Bに第2の駆動交流電圧として印加する第2の増幅回路24とを備える。
内径側ステータ13の駆動回路30も同様であり、駆動周波数(波長λ2)を発振する発振回路31と、発振回路31より発振された周波数信号の位相をシフトさせる移相回路32と、発振回路31より発振された周波数信号を増幅して第2の圧電セラミック15の第1の電極領域15Aに第3の駆動交流電圧として印加する第3の増幅回路33と、移相回路32より出力された周波数信号を増幅して第2の圧電セラミック15の第2の電極領域15Bに第4の駆動交流電圧として印加する第4の増幅回路34とを備える。
コントローラ40は、各駆動回路20、30の発振回路21、31の発振周波数の制御、移相回路22,32の位相シフト量の制御、第1から第4の各増幅回路の増幅率の制御などを行う。
[移動体搬送装置の動作]
次に、本実施形態の移動体搬送装置1の動作を説明する。
ここで、移動体Mとして、外部より拘束を受けていない球体を想定する。
次に、本実施形態の移動体搬送装置1の動作を説明する。
ここで、移動体Mとして、外部より拘束を受けていない球体を想定する。
この移動体搬送装置1では、図1に示すように、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dとの距離は移動体Mの直径よりも小さいものとされている。よって移動体Mは、外径側ステータ12の第1の振動部12dの内周側上端の角と、内径側ステータ13の第2の振動部13dの外周側上端の角の2点P1、P2に自重で加圧接触する。
外径側ステータ12の第1の振動部12dには、駆動回路20より第1の圧電セラミック14の2組の電極領域14A、14Bに、互いに所定の位相差をもつ第1の駆動交流電圧と第2の駆動交流電圧が同時に印加される。これにより各々の駆動交流電圧に対応する2つの定在波を合成した第1の進行波が外径側ステータ12の第1の振動部12dにおいて発生する。内径側ステータ13の第2の振動部13dにも同様に、駆動回路30より、第2の圧電セラミック15の2組の電極領域15A、15Bに、互いに所定の位相差をもつ第3の駆動交流電圧と第4の駆動交流電圧が同時に印加される。これにより各々の駆動交流電圧に対応する2つの定在波を合成した第2の進行波が発生する。
移動体Mは、外径側ステータ12の第1の振動部12dおよび内径側ステータ13の第2の振動部13dの各々との加圧接触点P1、P2での摩擦による駆動力を受ける。ここで、移動体Mと外径側ステータ12の第1の振動部12dおよび内径側ステータ13の第2の振動部13dの各々との加圧接触点P1、P2は、移動体Mの重心CPの位置から搬送路100の幅方向に十分ずれているので、各々の加圧接触点P1、P2から移動体Mに同じ速度(角速度)の駆動力が加わらない限り、移動体Mに搬送路100を移動させるための力が加わり、移動体Mの搬送が実現される。
また、このように外径側ステータ12の第1の振動部12dおよび内径側ステータ13の第2の振動部13dの各々との加圧接触点P1、P2での摩擦による2つの駆動力で移動体Mを駆動させる場合、第1の振動部12dおよび第2の振動部13dに発生させる各々の進行波の振幅および、各々のステータ固有振動数の近傍での周波数(波長)の調整により、移動体Mが重心CPの直下の一点で振動体に加圧接触している状態と同様に、移動体Mを搬送路上の任意の位置で回転させる状況(定点回転)を積極的につくりだすことができる。
また、外径側ステータ12の第1の振動部12dおよび内径側ステータ13の第2の振動部13dに発生させる各々の進行波の進行方向を制御することによって、移動体Mの搬送方向を正逆切り替えることは勿論、各々の進行波の進行方向を互いに逆向きとすることによって、移動体Mをステータ厚み方向に沿った軸(垂直軸)の周り方向に定点回転させたりすることも可能である。この場合には、各々の加圧接触点P1、P2から互いに逆向きで角速度が等しい駆動力が移動体Mに加えられる必要がある。すなわち、第1の振動部12dおよび第2の振動部13dに発生させる各々の進行波の振幅および、各々のステータ固有振動数の近傍での周波数(波長)の調整が必要である。
コントローラ40は、このように移動体Mの様々な動きを実現するために、各駆動回路20、30の発振回路21、31の発振周波数の制御、移相回路22、32の位相シフト量の制御、第1から第4の増幅回路23、24、33、34の増幅率の制御などを行うことが可能なように構成されている。
なお、コントローラ40による各駆動回路20、30の制御は、外径側ステータ12および内径側ステータ13のいずれか一方のステータの圧電セラミックへの駆動交流電圧の印加を停止することや、いずれか一方のステータの圧電セラミックに印加する2つの駆動交流電圧の位相差を0にすることも含んでいる。
このように、一方のステータの圧電セラミックに印加する駆動交流電圧を停止したり、圧電セラミックの2組の電極領域にそれぞれ印加する2つの駆動交流電圧の位相差を0にして一方のステータには定在波のみを発生させることによって、移動体Mの駆動力を生む進行波は1つとなるが、少なくとも、移動体Mをその重心CPの回りを自転させるようにだけ駆動力が加わることがないので、例えば、進行波のエネルギーの調整次第で移動体Mの搬送を実現できる。
次に、上記の本発明に係る実施形態の変形例を説明する。
<変形例1>
図6は、変形例1の移動体搬送装置1Aを示す斜視図である。
この変形例1の移動体搬送装置1Aは、上記の第1の実施形態の外径側ステータ12を、進行波が励振されることのない、単に移動体Mの搬送路の形成にのみ寄与するガイド部材16に置き換えたものである。すなわち、このガイド部材16はステータに必要な圧電セラミックは貼り付けられておらず、上面部のくし歯状の溝も不要である。
図6は、変形例1の移動体搬送装置1Aを示す斜視図である。
この変形例1の移動体搬送装置1Aは、上記の第1の実施形態の外径側ステータ12を、進行波が励振されることのない、単に移動体Mの搬送路の形成にのみ寄与するガイド部材16に置き換えたものである。すなわち、このガイド部材16はステータに必要な圧電セラミックは貼り付けられておらず、上面部のくし歯状の溝も不要である。
すなわち、この構成は、上記の第1の実施形態の移動体搬送装置1において一方のステータの圧電セラミックに印加する駆動交流電圧を停止することによって実現される1進行波による駆動状態と等価なものである。
なお、この変形例1では、上記の第1の実施形態の外径側ステータ12を、単に移動体Mの搬送路の形成にのみ寄与するガイド部材16に置き換えた場合を示したが、逆に上記の第1の実施形態の内径側ステータ13を、進行波が励振されることのない、単に移動体Mの搬送路の形成にのみ寄与するガイド部材に置き換えてもよい。
<変形例2>
本発明は、移動体Mを環状の搬送路を移動させる移動体搬送装置に限定されない。
本発明は、移動体Mを直線方向に移動させるリニア型移動体搬送装置として構成することも可能である。
なお、環状の搬送路は、円形に限らず、楕円でもよいし、さらに複雑に曲がった環状あるいは線状の搬送路にも本発明は適用できる。
本発明は、移動体Mを環状の搬送路を移動させる移動体搬送装置に限定されない。
本発明は、移動体Mを直線方向に移動させるリニア型移動体搬送装置として構成することも可能である。
なお、環状の搬送路は、円形に限らず、楕円でもよいし、さらに複雑に曲がった環状あるいは線状の搬送路にも本発明は適用できる。
<変形例3>
移動体Mとしては、球体であることに本発明は限定されない。
例えば、本発明は、図7に示すように楕円断面を有する移動体M1の搬送および自転にも利用できる。
また、図8に示すように、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dに加圧接触する部分だけが曲面となった移動体M2の搬送にも本発明は適用可能である。
さらに、本発明は、円柱体、円筒体の搬送や、図9に示すように、直方体の移動体M3の搬送にも適用可能である。
移動体Mとしては、球体であることに本発明は限定されない。
例えば、本発明は、図7に示すように楕円断面を有する移動体M1の搬送および自転にも利用できる。
また、図8に示すように、外径側ステータ12の第1の振動部12dと内径側ステータ13の第2の振動部13dに加圧接触する部分だけが曲面となった移動体M2の搬送にも本発明は適用可能である。
さらに、本発明は、円柱体、円筒体の搬送や、図9に示すように、直方体の移動体M3の搬送にも適用可能である。
<変形例4>
上記第1の実施形態では、外径側ステータ12の上面と外周面との角を90度としたが、例えば、図10に示すように、外径側ステータ12の外周側の上部をテーパー状に形成してもよい。これにより、外周部の剛性が低くできるため、進行波をより励振させやすくすることができる。
上記第1の実施形態では、外径側ステータ12の上面と外周面との角を90度としたが、例えば、図10に示すように、外径側ステータ12の外周側の上部をテーパー状に形成してもよい。これにより、外周部の剛性が低くできるため、進行波をより励振させやすくすることができる。
<変形例5>
図11に示すように、外径側ステータ12の内周側の上部と内径側ステータ13の外周側の上部をテーパー状に切り欠いて、移動体Mが載る部分を全体としてすり鉢状に形成してもよい。これにより、移動体Mの保持安定性が向上するとともに、移動体Mの曲面を溝12e、13eが形成された第1、第2の振動部12d、13dの上面、すなわち線で摩擦接触できるため、確実に駆動力を与えることができる。
図11に示すように、外径側ステータ12の内周側の上部と内径側ステータ13の外周側の上部をテーパー状に切り欠いて、移動体Mが載る部分を全体としてすり鉢状に形成してもよい。これにより、移動体Mの保持安定性が向上するとともに、移動体Mの曲面を溝12e、13eが形成された第1、第2の振動部12d、13dの上面、すなわち線で摩擦接触できるため、確実に駆動力を与えることができる。
<変形例6>
図12に示すように、外径側ステータ12および内径側ステータ13の上部の溝13eを、移動体Mが加圧接触する側をより深く形成するようにしてもよい。
図12に示すように、外径側ステータ12および内径側ステータ13の上部の溝13eを、移動体Mが加圧接触する側をより深く形成するようにしてもよい。
以上、移動体Mを搬送する移動体搬送装置1について説明したが、本発明は、移動体Mを定点回転させる移動体駆動装置として提供することも可能である。すなわち、駆動方法を切り替えることで、移動体Mを搬送、定点回転などを自由自在に行うことができる。
また、上記の実施形態では、外部より拘束をうけていない球体を移動体Mとして説明したが、意図する回転を遮らないように、部分的に拘束した構成を採用してもよい。例えば、移動体Mに接触し、移動体Mの回転に応じて回転(移動)するものであればよく、これにより、保持力や、加圧力を印加することもできる。
また、上記の実施形態では、各ガイド部材と移動体との当接をそれぞれ各ガイド部材毎に各1点として説明したが、これに限定されるものではなく、例えば、各ガイド部材に2点の当接点を設けてもよいことはもちろんである。
以上説明した移動体搬送装置1および移動体駆動装置は磁気回路を用いない構成であるため、例えば、遊技機など、磁気による影響が懸念される機器において特に有用な装置といえるものである。
M…移動体
1…移動体搬送装置
11…ベース部材
12…外径側ステータ
12d…第1の振動部
13…内径側ステータ
13d…第2の振動部
14…第1の圧電セラミック
15…第2の圧電セラミック
20、30…駆動回路
21、31…発振回路
22、32…移相回路
23…第1の増幅回路
24…第2の増幅回路
33…第3の増幅回路
34…第4の増幅回路
40…コントローラ
100…搬送路
1…移動体搬送装置
11…ベース部材
12…外径側ステータ
12d…第1の振動部
13…内径側ステータ
13d…第2の振動部
14…第1の圧電セラミック
15…第2の圧電セラミック
20、30…駆動回路
21、31…発振回路
22、32…移相回路
23…第1の増幅回路
24…第2の増幅回路
33…第3の増幅回路
34…第4の増幅回路
40…コントローラ
100…搬送路
Claims (6)
- 上面に載置された移動体を所定方向に搬送する移動体搬送装置であって、
第1のガイド部材と、
前記第1のガイド部材とともに前記移動体の搬送路を形成する第2のガイド部材と、
を備え、
前記第1のガイド部材及び前記第2のガイド部材は、前記移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて前記移動体を搬送すること
を特徴とする移動体搬送装置。 - 前記移動体は、前記第1のガイド部材及び前記第2のガイド部材と当接される面が曲面である
ことを特徴とする請求項1記載の移動体搬送装置。 - 前記移動体は、球体であり、自重によって、前記第1のガイド部材及び前記第2のガイド部材との圧接力を得ていることを特徴とする請求項1又は2記載の移動体搬送装置。
- 前記搬送路は、円環状である
ことを特徴とする請求項1ないし3のいずれか1項に記載の移動体搬送装置。 - 前記搬送路は、直線状である
ことを特徴とする請求項1ないし3のいずれか1項に記載の移動体搬送装置。 - 上面に載置された移動体に駆動力を印加する移動体駆動装置であって、
第1のガイド部材と、
前記第1のガイド部材とともに前記移動体の搬送路を形成する第2のガイド部材と、
を備え、
前記第1のガイド部材及び第2のガイド部材は、前記移動体に対して、各々少なくとも一点で当接し、少なくとも一方のガイド部材に当該ガイド部材に沿った進行波を励起させて前記移動体を駆動すること
を特徴とする移動体駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014133087A JP2016012977A (ja) | 2014-06-27 | 2014-06-27 | 移動体搬送装置および移動体駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014133087A JP2016012977A (ja) | 2014-06-27 | 2014-06-27 | 移動体搬送装置および移動体駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016012977A true JP2016012977A (ja) | 2016-01-21 |
Family
ID=55229370
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014133087A Pending JP2016012977A (ja) | 2014-06-27 | 2014-06-27 | 移動体搬送装置および移動体駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016012977A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018051853A1 (ja) * | 2016-09-14 | 2018-03-22 | 株式会社新生工業 | 搬送装置及び遊技機 |
| JP2018131304A (ja) * | 2017-02-16 | 2018-08-23 | シンフォニアテクノロジー株式会社 | ワーク搬送装置 |
| CN111747039A (zh) * | 2019-03-27 | 2020-10-09 | 昕芙旎雅有限公司 | 工件搬运装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS511985U (ja) * | 1974-06-20 | 1976-01-08 | ||
| JPH02211071A (ja) * | 1989-02-06 | 1990-08-22 | Fukoku:Kk | 超音波モータ |
| JPH0365074A (ja) * | 1989-07-31 | 1991-03-20 | Mitsubishi Electric Corp | 超音波モータ |
| JP2007068350A (ja) * | 2005-09-01 | 2007-03-15 | Tokyo Institute Of Technology | 駆動・案内装置 |
-
2014
- 2014-06-27 JP JP2014133087A patent/JP2016012977A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS511985U (ja) * | 1974-06-20 | 1976-01-08 | ||
| JPH02211071A (ja) * | 1989-02-06 | 1990-08-22 | Fukoku:Kk | 超音波モータ |
| JPH0365074A (ja) * | 1989-07-31 | 1991-03-20 | Mitsubishi Electric Corp | 超音波モータ |
| JP2007068350A (ja) * | 2005-09-01 | 2007-03-15 | Tokyo Institute Of Technology | 駆動・案内装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018051853A1 (ja) * | 2016-09-14 | 2018-03-22 | 株式会社新生工業 | 搬送装置及び遊技機 |
| JP2018131304A (ja) * | 2017-02-16 | 2018-08-23 | シンフォニアテクノロジー株式会社 | ワーク搬送装置 |
| CN111747039A (zh) * | 2019-03-27 | 2020-10-09 | 昕芙旎雅有限公司 | 工件搬运装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100571014C (zh) | 振动型驱动装置的控制装置和控制方法 | |
| JP2016012977A (ja) | 移動体搬送装置および移動体駆動装置 | |
| JPH0238483B2 (ja) | ||
| US11114954B2 (en) | Ultrasonic motor having generators formed of cooperating and spaced apart first and second sub-generators | |
| JP4871594B2 (ja) | 振動波駆動装置及び振動波駆動機器 | |
| JP2003040421A (ja) | 物体搬送装置 | |
| JP5179918B2 (ja) | 超音波モータ装置 | |
| JP5179913B2 (ja) | 超音波モータ装置 | |
| CN111747039B (zh) | 工件搬运装置 | |
| JP5315434B2 (ja) | 駆動装置 | |
| KR100661311B1 (ko) | 압전 초음파 모터 | |
| JP4979017B2 (ja) | 超音波モータおよびそれに用いられる超音波振動子 | |
| KR100712591B1 (ko) | 전방향성 초음파 압전 액츄에이터 시스템 | |
| JP7564434B2 (ja) | ワーク搬送装置 | |
| JP2980705B2 (ja) | 移動装置 | |
| JP2018104189A (ja) | ワーク搬送装置、及び、ワーク搬送装置における調整方法 | |
| TW201912542A (zh) | 工件搬送裝置及工件搬送裝置之製造方法 | |
| US10211760B2 (en) | Piezoelectric ultrasonic motor and operation method of the same | |
| KR20150139360A (ko) | 선 접촉식 진동자 및 이를 이용한 초음파모터 | |
| JP2018108001A (ja) | ワーク搬送装置 | |
| JPH04299079A (ja) | 移動装置の駆動方法および超音波モータの駆動方法 | |
| JPH04355677A (ja) | 移送用超音波アクチュエータ及び移送装置 | |
| JP2008148439A (ja) | 振動型アクチュエータ及びその制御方法 | |
| JPS63230443A (ja) | 搬送装置 | |
| JP5571521B2 (ja) | 超音波モータおよびその駆動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180124 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180807 |