JP2016018104A - 駆動装置及びレンズ装置 - Google Patents
駆動装置及びレンズ装置 Download PDFInfo
- Publication number
- JP2016018104A JP2016018104A JP2014141314A JP2014141314A JP2016018104A JP 2016018104 A JP2016018104 A JP 2016018104A JP 2014141314 A JP2014141314 A JP 2014141314A JP 2014141314 A JP2014141314 A JP 2014141314A JP 2016018104 A JP2016018104 A JP 2016018104A
- Authority
- JP
- Japan
- Prior art keywords
- detected
- detection
- waveform
- detecting
- relative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Lens Barrels (AREA)
Abstract
【解決手段】駆動装置を、所定のパターンが周期的に形成された被検出手段と、被検出手段に形成されたパターンを被検出手段との距離に応じた強さで検出する検出手段と、被検出手段と検出手段とを相対的に動作させることが可能な動作手段と、被検出手段に対する検出手段の位置に応じて被検出手段と検出手段との距離を規定する距離規定手段と、検出手段により検出されるパターン数に基づいて被検出手段に対する検出手段の移動量を演算すると共に検出されるパターンの強さに応じて被検出手段に対する検出手段の位置を演算する演算手段と、から構成する。
【選択図】図3
Description
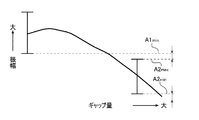
A1min>A2max+C
A2min>C
ここで、符号A1minは、センサ部144sが磁気コード板142の磁気コード中央範囲に位置するときのGMRセンサ146A及び146Bのアナログ出力波形が取り得る最小振幅を示す値であり、誤差要因として、GMRセンサ146A、146B及び磁気コード板142の部品個体差並びに温湿度特性による環境変化等が考慮されている。また、符号A2max、A2minはそれぞれ、センサ部144sが磁気コード板142の磁気コード端点範囲に位置するときのGMRセンサ146A及び146Bのアナログ出力波形が取り得る最大振幅、最小振幅を示す値であり、誤差要因として、GMRセンサ146A、146B及び磁気コード板142の部品個体差(磁気コード板142の厚み寸法を含む。)、温湿度特性による環境変化及びフォーカスギア筒124に形成されたリブ124rの高さ寸法の誤差等が考慮されている。また、符号Cは、各コンパレータの基準電圧(閾値)のばらつき及びヒステリシス等の誤差量のパラメータを最小振幅A1min等に合わせて換算した値である。

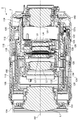
2 マウント筒
102 第1群保持枠
104 移動筒
106 直進筒
108 案内筒
110 カム環
112 ズームリング
114 内筒
116 外筒
118 フォーカス受筒
120 フォーカス板金
122 ギアードモータ
122g 出力ギア
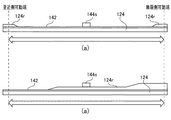
124 フォーカスギア筒
124a 貼付領域
124r リブ
124ra リブ本体部
124rb リブ傾斜部
126 摺動部材
128 フォーカス継筒
130 第一フォーカスレバー
132 第二フォーカスレバー
134 フォーカスカム筒
136 第2保持枠
138 フォーカス直進筒
140 回路部
140Aa、140Ba 増幅器
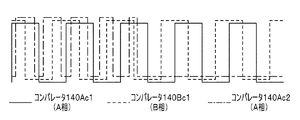
140Ac1、140Ac2、140Bc1 コンパレータ
140d モータドライバIC
140IC 制御IC
142 磁気コード板
144 板金部
144s センサ部
146A、146B GMRセンサ
148 コード板
150 検出ブラシ
L1〜L6 第1〜6群レンズ
Claims (13)
- 所定のパターンが周期的に形成された被検出手段と、
前記パターンを前記被検出手段との距離に応じた強さで検出する検出手段と、
前記被検出手段と前記検出手段とを相対的に動作させることが可能な動作手段と、
前記被検出手段に対する前記検出手段の位置に応じて該被検出手段と該検出手段との距離を規定する距離規定手段と、
前記検出手段により検出されるパターン数に基づいて前記被検出手段に対する該検出手段の移動量を演算すると共に該検出されるパターンの強さに応じて該被検出手段に対する該検出手段の位置を演算する演算手段と、
を備える、
駆動装置。 - 前記被検出手段を保持する第一の保持手段と、
前記検出手段を保持する第二の保持手段と、
を備え、
前記動作手段は、
前記第一の保持手段と前記第二の保持手段とを相対的に動作させることにより、該第一の保持手段上に保持された被検出手段に対して前記検出手段を移動させ、
前記距離規定手段は、
前記検出手段を前記第一の保持手段上に保持された被検出手段側に付勢する付勢手段と、
前記被検出手段に対する前記検出手段の移動方向に沿って前記第一の保持手段上に形成された少なくとも一つの段差を含む突起部であって、前記付勢手段によって該被検出手段側に付勢された検出手段を受けることにより、該被検出手段と該検出手段との距離を該段差の高さに応じた間隔に規定するものと、
を含む、
請求項1に記載の駆動装置。 - 前記突起部は、
前記被検出手段に対する前記検出手段の移動範囲の一部で前記移動方向に沿って前記第一の保持手段上に形成されており、
前記検出手段は、
前記移動範囲の中で前記突起部が形成されていない領域では該突起部を介することなく前記付勢手段によって前記被検出手段上に付勢される、
請求項2に記載の駆動装置。 - 前記第一の保持手段は、
所定の移動対象物を収容し保持する円筒状部材であり、
前記被検出手段は、
前記円筒状部材の外周面上に周方向に沿って貼り付けられており、所定のピッチで着磁されている磁気コード板であり、
前記検出手段は、
前記磁気コード板の磁界変化を検出する磁気センサであり、
前記突起部は、
前記円筒状部材の外周面上に前記磁気コード板に沿って立設されたリブ形状であり、前記付勢手段によって付勢される磁気センサを受けることにより、該磁気コード板と該磁気センサとの距離をその高さに応じた間隔に規定する、
請求項2又は請求項3に記載の駆動装置。 - 前記第一の保持手段は、
所定の移動対象物を収容し保持する円筒状部材であり、
前記被検出手段は、
前記円筒状部材の外周面上に周方向に沿って貼り付けられており、反射部と非反射部とが周期的に並ぶパターンが形成された反射シートであり、
前記検出手段は、
前記反射シートに形成されたパターンを検出するフォトリフレクタであり、
前記突起部は、
前記円筒状部材の外周面上に前記反射シートに沿って立設されたリブ形状であり、前記付勢手段によって付勢されるフォトリフレクタを受けることにより、該反射シートと該フォトリフレクタとの距離をその高さに応じた間隔に規定する、
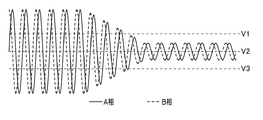
請求項2又は請求項3に記載の駆動装置。 - 前記演算手段は、
前記検出手段により検出されるパターンの強さに応じて異なる波形を出力する波形出力手段と、
前記波形出力手段により出力される波形に基づいて前記被検出手段に対する前記検出手段の位置を演算する位置演算手段と、
を含む、
請求項1から請求項5の何れか一項に記載の駆動装置。 - 前記波形出力手段は、
前記検出手段により検出されるパターンのアナログ波形を二値化波形に変換する二値化回路
を含む、
請求項6に記載の駆動装置。 - 前記二値化回路は、
前記距離規定手段により規定される前記被検出手段と前記検出手段との距離毎に異なる二値化波形が出力されるように、前記アナログ波形の強さに対する閾値が設定されており、
前記位置演算手段は、
前記二値化回路より出力される二値化波形に基づいて前記被検出手段に対する前記検出手段の位置を演算する、
請求項7に記載の駆動装置。 - 前記二値化回路は、
前記アナログ波形を前記距離規定手段により規定される前記被検出手段と前記検出手段との距離に拘わらず常に同じ二値化波形に変換する第一のコンパレータと、
前記アナログ波形を前記距離毎に異なる二値化波形に変換する第二のコンパレータと、
を含み、
前記演算手段は、
前記第一のコンパレータにより出力される第一の二値化波形に基づいて前記被検出手段に対する前記検出手段の移動量を演算する移動量演算手段
を含み、
前記位置演算手段は、
前記第二のコンパレータにより出力される第二の二値化波形に基づいて前記被検出手段に対する前記検出手段の位置を演算する、
請求項7又は請求項8に記載の駆動装置。 - 前記二値化回路は、
前記アナログ波形を前記距離規定手段により規定される前記被検出手段と前記検出手段との距離に拘わらず常に同じ二値化波形に変換する第三のコンパレータ
を含み、
前記検出手段は、
互いに位相が直交するA相、B相を検出する一対の検出センサ
を含み、
前記第二のコンパレータは、
前記A相のアナログ波形を前記第二の二値化波形に変換し、
前記第三のコンパレータは、
前記B相のアナログ波形を第三の二値化波形に変換し、
前記位置演算手段は、
前記第三の二値化波形の立ち上がり時、立ち下がり時における前記第二の二値化波形のHigh/Lowにより、前記被検出手段に対する前記検出手段の位置を特定する、
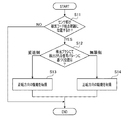
請求項9に記載の駆動装置。 - 前記位置演算手段は、
前記被検出手段に対する前記検出手段の位置が該検出手段の移動範囲の端点近傍か否かを判定し、
前記動作手段は、
前記被検出手段に対する前記検出手段の位置が前記移動範囲の端点近傍と判定された場合、該被検出手段と該検出手段との相対的な動作を制限する、
請求項6から請求項10の何れか一項に記載の駆動装置。 - 前記第一の保持部材に保持された検出ブラシと、
前記第二の保持部材に保持されており、所定の接点パターンが形成されているコード板と、
を備え、
前記位置演算手段は、
前記被検出手段に対する前記検出手段の位置が前記移動範囲の端点近傍と判定したときに、前記検出ブラシより検出されるコード板の接点パターンに基づいて該検出手段が一方の端点付近又は他方の端点付近に位置するかを特定し、
前記動作手段は、
前記被検出手段に対する前記検出手段の位置が前記一方の端点付近と判定された場合、該一方の端点への該検出手段の移動を制限し、
前記被検出手段に対する前記検出手段の位置が前記他方の端点付近と判定された場合、該他方の端点への該検出手段の移動を制限する、
請求項11に記載の駆動装置。 - 請求項1から請求項12の何れか一項に記載の駆動装置と、
光軸方向に対して不動な固定レンズ群、及び前記動作手段による前記被検出手段と前記検出手段との相対動作に伴って該光軸方向に移動する可動レンズ群を含むレンズ群と、
を備える、
レンズ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014141314A JP6425060B2 (ja) | 2014-07-09 | 2014-07-09 | 駆動装置及びレンズ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014141314A JP6425060B2 (ja) | 2014-07-09 | 2014-07-09 | 駆動装置及びレンズ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016018104A true JP2016018104A (ja) | 2016-02-01 |
| JP6425060B2 JP6425060B2 (ja) | 2018-11-21 |
Family
ID=55233359
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014141314A Expired - Fee Related JP6425060B2 (ja) | 2014-07-09 | 2014-07-09 | 駆動装置及びレンズ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6425060B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021173969A (ja) * | 2020-04-30 | 2021-11-01 | キヤノン株式会社 | 光学機器 |
| CN114077144A (zh) * | 2021-08-13 | 2022-02-22 | 深圳市安华光电技术有限公司 | 用于投影仪的自动调焦镜头及投影仪 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07128566A (ja) * | 1993-10-28 | 1995-05-19 | Olympus Optical Co Ltd | 移動量検出装置 |
| JPH0894307A (ja) * | 1994-09-21 | 1996-04-12 | Minolta Co Ltd | 移動部材の位置検出装置 |
| JP2009015023A (ja) * | 2007-07-05 | 2009-01-22 | Sharp Corp | 駆動装置及びこれを備えた撮像装置 |
| JP2009169202A (ja) * | 2008-01-18 | 2009-07-30 | Sony Corp | レンズ鏡筒および撮像装置 |
-
2014
- 2014-07-09 JP JP2014141314A patent/JP6425060B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07128566A (ja) * | 1993-10-28 | 1995-05-19 | Olympus Optical Co Ltd | 移動量検出装置 |
| JPH0894307A (ja) * | 1994-09-21 | 1996-04-12 | Minolta Co Ltd | 移動部材の位置検出装置 |
| JP2009015023A (ja) * | 2007-07-05 | 2009-01-22 | Sharp Corp | 駆動装置及びこれを備えた撮像装置 |
| JP2009169202A (ja) * | 2008-01-18 | 2009-07-30 | Sony Corp | レンズ鏡筒および撮像装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021173969A (ja) * | 2020-04-30 | 2021-11-01 | キヤノン株式会社 | 光学機器 |
| JP7490441B2 (ja) | 2020-04-30 | 2024-05-27 | キヤノン株式会社 | 光学機器 |
| CN114077144A (zh) * | 2021-08-13 | 2022-02-22 | 深圳市安华光电技术有限公司 | 用于投影仪的自动调焦镜头及投影仪 |
| CN114077144B (zh) * | 2021-08-13 | 2024-04-02 | 深圳市安华光电技术股份有限公司 | 用于投影仪的自动调焦镜头及投影仪 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6425060B2 (ja) | 2018-11-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100900873B1 (ko) | 광학식 인코더 및 상기 광학식 인코더를 이용한 장치 | |
| US10200576B2 (en) | Rotatable-swingable input device and electronic apparatus equipped with the same | |
| US10094684B2 (en) | Method of manufacturing rotary scale, rotary scale, rotary encoder, driving apparatus, image pickup apparatus and robot apparatus | |
| US9121735B2 (en) | Encoder, lens apparatus, and camera capable of detecting position of object | |
| CN104048598A (zh) | 使用了反射型光电传感器的位置检测装置 | |
| JP6973398B2 (ja) | レンズ装置 | |
| JP6425060B2 (ja) | 駆動装置及びレンズ装置 | |
| JP2017072474A (ja) | 電子機器 | |
| JP5243187B2 (ja) | レンズ装置 | |
| CN101336391B (zh) | 用于成像系统中的光学部件的位置检测的方法和设备 | |
| JP2005091092A (ja) | 位置検出センサ | |
| US7782546B1 (en) | Zoom lens having increased positioning accuracy | |
| US9116020B2 (en) | Encoder, lens apparatus, and camera capable of detecting position of object | |
| CN207249317U (zh) | 一种成像设备 | |
| US9709876B2 (en) | Optical device | |
| JP2009015023A (ja) | 駆動装置及びこれを備えた撮像装置 | |
| US12088918B2 (en) | Camera module and control method of camera module | |
| JP5704810B2 (ja) | 撮像装置 | |
| US11193800B2 (en) | Absolute position detection apparatus and method that obtains the position based on first and second signals of a periodic pattern, and storage medium of same | |
| JP2020013029A5 (ja) | ||
| JP2011090073A (ja) | レンズ駆動装置および光学機器 | |
| JP4839731B2 (ja) | フォーカス光学系の移動制御装置 | |
| KR100714005B1 (ko) | 소형 카메라 모듈의 변위 감지 센서 | |
| JP2006243668A (ja) | ズームレンズ装置 | |
| JP6184227B2 (ja) | レンズ鏡筒及び光学装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170602 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180406 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181010 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6425060 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |