JP2016019362A - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- JP2016019362A JP2016019362A JP2014140626A JP2014140626A JP2016019362A JP 2016019362 A JP2016019362 A JP 2016019362A JP 2014140626 A JP2014140626 A JP 2014140626A JP 2014140626 A JP2014140626 A JP 2014140626A JP 2016019362 A JP2016019362 A JP 2016019362A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- hall element
- rotor
- brushless motor
- resin material
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Brushless Motors (AREA)
Abstract
【課題】ホール素子によるロータの位置検出精度を向上させる。
【解決手段】ロータ部2が有するマグネット1は、シャフト10の軸方向において、ステータ部5のステータコア3より突き出た突出部1aを有する。ホール素子7は、シャフト10の径方向において突出部1aに対向するステータ部5の樹脂材4に設置されて、マグネット1の回転位置を検出する。
【選択図】図1
【解決手段】ロータ部2が有するマグネット1は、シャフト10の軸方向において、ステータ部5のステータコア3より突き出た突出部1aを有する。ホール素子7は、シャフト10の径方向において突出部1aに対向するステータ部5の樹脂材4に設置されて、マグネット1の回転位置を検出する。
【選択図】図1
Description
この発明は、ロータの回転位置を検出するホール素子を備えたブラシレスモータに関するものである。
車両用電装品等、例えばEGR(Exhaust Gas Recirculation)バルブのバルブ駆動に用いられるブラシレスモータには、正確かつ高精度な駆動が求められている。
一般的なブラシレスモータは、ロータの回転位置を検出し、検出した回転位置に基づいてステータ側のコイルを順次励磁してロータを回転駆動する(例えば、特許文献1参照)。例えば3相ブラシレスモータの場合、3個のホール素子それぞれがロータ磁極の回転方向の切り替わりに応じてハイレベル“H”とロウレベル“L”の電気信号を出力し、これらの電気信号に基づいて3相(U,V,W)のステータコイルに的確なタイミングで通電して励磁することにより、ロータを回転駆動している。ロータの回転位置に対してステータコイルの励磁タイミングが的確であると、トルクの変動が少なく精度のよい駆動が可能となる。逆にタイミングがずれると、トルクの変動が大きく不安定な挙動になってしまう。精度よく駆動するには、ホール素子によるロータの位置検出の正確さが不可欠である。
特許文献1のブラシレスモータは、ロータ軸に取り付けられてロータを構成するロータマグネットと、ロータ軸のエンドブラケット側端部に取り付けられる位置検出用マグネットとを備え、ホール素子が位置検出用マグネットの位置を検出する構成である。この構成では、ロータマグネットと位置検出用マグネットとが別体になっているため、それぞれの部品の組み付けずれに加えて着磁ずれが発生する懸念があった。
前述の組み付けずれおよび着磁ずれによるロータ位置検出精度の低下を回避する方法としては、位置検出用マグネットを廃し、ロータマグネットを直接ホール素子にて検出する方法がある。そのためには、ステータティース間の隙間を広げて、その隙間にホール素子を設置する必要がある。ステータティース間の隙間を広げると、ステータの励磁切り替えの分解能が低くなり、ロータの回転駆動精度が低下するため、EGRバルブのような駆動に精度を要する用途には不向きである。
この発明は、上記のような課題を解決するためになされたもので、ホール素子によるロータの位置検出精度を向上させることを目的とする。
この発明に係るブラシレスモータは、シャフトのまわりに複数の極数のマグネットを有するロータ部と、ロータ部の外周側に配置され、コイルが配設されたステータコアが樹脂材により保持されているステータ部と、ステータ部に対してロータ部を回転自在に保持する軸受と、ロータ部が有するマグネットの回転位置を検出するホール素子とを備え、マグネットは、シャフトの軸方向においてステータコアより突き出た突出部を有し、ホール素子は、シャフトの径方向において突出部に対向するステータ部の樹脂材に設置されているものである。
この発明によれば、ロータ部のマグネットは、シャフトの軸方向においてステータコアより突き出た突出部を有し、ホール素子は、シャフトの径方向において突出部に対向するステータ部の樹脂材に設置されてマグネットの回転位置を検出するようにしたので、ホール素子によるロータ部の位置検出精度を向上させることができる。
実施の形態1.
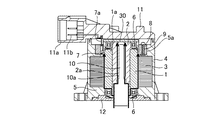
図1(a)は、実施の形態1に係るブラシレスモータを軸方向に切断した断面図を示す。図1(b)は、AA線で切断した断面図である。図示するように、実施の形態1に係るブラシレスモータは、複数の極数のマグネット1を有するロータ部2と、ロータ部2の外周側に設置され、不図示のコイルが配設されたステータコア3が樹脂材4により保持されているステータ部5と、ステータ部5に対してロータ部2を回転自在に保持する軸受6と、ロータ部2が有するマグネット1の回転位置を検出するホール素子7と、ホール素子7を取り付けた環状プレート8と、シャフト10と、カバー11,12とを含む。
図1(a)は、実施の形態1に係るブラシレスモータを軸方向に切断した断面図を示す。図1(b)は、AA線で切断した断面図である。図示するように、実施の形態1に係るブラシレスモータは、複数の極数のマグネット1を有するロータ部2と、ロータ部2の外周側に設置され、不図示のコイルが配設されたステータコア3が樹脂材4により保持されているステータ部5と、ステータ部5に対してロータ部2を回転自在に保持する軸受6と、ロータ部2が有するマグネット1の回転位置を検出するホール素子7と、ホール素子7を取り付けた環状プレート8と、シャフト10と、カバー11,12とを含む。
ステータ部5は、コイル(不図示)の配設されたステータコア3が樹脂材4によりインサート成形されている。ステータ部5の内側には、ロータ部2が、2個の軸受6により回転自在に保持されている。ステータ部5の上面には環状の溝5aが形成され、ホール素子7を取り付けた環状プレート8が溝5aに圧入されて埋め込まれている。この環状プレート8は、ネジ9を用いてステータ部5に固定されている。また、ステータ部5の上下は、カバー11およびカバー12により被覆されている。
図示例では、ホール素子7を3個、ネジ9を3本示したが、これらの個数および配置位置は任意でよい。
また、ホール素子7を実装した基板を環状プレート8に取り付けてもよいし、ホール素子7を内蔵したホールIC(Integrated Circuit)を基板に実装しこの基板を環状プレート8に取り付けてもよい。ホール素子7と電気的に接続された端子7aは、環状プレート8からカバー11側に突き出て、コネクタ11aのターミナル11bに接続している。
また、ホール素子7を実装した基板を環状プレート8に取り付けてもよいし、ホール素子7を内蔵したホールIC(Integrated Circuit)を基板に実装しこの基板を環状プレート8に取り付けてもよい。ホール素子7と電気的に接続された端子7aは、環状プレート8からカバー11側に突き出て、コネクタ11aのターミナル11bに接続している。
ロータ部2は、複数の極数のマグネット1を有する。このマグネット1の上端部は、ステータコア3の上端部より突き出た突出部1aを構成しており、この突出部1aに対向するステータ部5の樹脂材4にホール素子7が配置される。
ロータ部2の内側には、シャフト10を通す穴が貫通しており、この穴の内周面に雌ネジ部2aが設けられている。シャフト10の外周面には、ロータ部2の雌ネジ部2aに螺合する雄ネジ部10aが設けられている。雌ネジ部2aと雄ネジ部10aとが螺合しているので、ロータ部2の一方向への回転に伴ってシャフト10が下方に押し出され、ロータ部2の他方向への回転に伴ってシャフト10が上方に引き込まれる。例えば、EGRバルブのアクチュエータとして本ブラシレスモータを利用する場合、バルブに接続されたロッドをシャフト10の動きに連動させることにより、バルブが開閉される。
ロータ部2の内側には、シャフト10を通す穴が貫通しており、この穴の内周面に雌ネジ部2aが設けられている。シャフト10の外周面には、ロータ部2の雌ネジ部2aに螺合する雄ネジ部10aが設けられている。雌ネジ部2aと雄ネジ部10aとが螺合しているので、ロータ部2の一方向への回転に伴ってシャフト10が下方に押し出され、ロータ部2の他方向への回転に伴ってシャフト10が上方に引き込まれる。例えば、EGRバルブのアクチュエータとして本ブラシレスモータを利用する場合、バルブに接続されたロッドをシャフト10の動きに連動させることにより、バルブが開閉される。
ホール素子7は、ロータ部2の外周側に配置され、このロータ部2に備えられたマグネット1を検出する。ホール素子7を取り付けた環状プレート8をステータ部5の環状の溝5aに圧入して埋め込む構造にすることで、ホール素子7の位置精度を確保できる。また、圧入により環状プレート8の径方向を保持し、ネジ9で回転方向を保持しているので、EGRバルブのような車両の振動を受ける環境において耐振性を発揮する。
また、先立って説明した特許文献1のような位置検出用マグネットを設置する必要がないため、ロータマグネットと位置検出用マグネットの組み付けずれおよび着磁ずれは発生しない。また、上記特許文献1で位置検出用マグネットの設置に要していたスペース分、ブラシレスモータの軸長を短くすることが可能となる。さらに、ロータ部2の回転中心を決める軸受6近傍に環状プレート8を配置しているため、ホール素子7の配置の中心とロータ部2の回転の中心とのずれを低減させることができる。従って、ホール素子7によるロータ部2の回転位置の検出精度を向上させることが可能となる。また、ロータ部2の回転位置に対してステータ部5の励磁タイミングを的確に制御できるようになり、位相ずれによる駆動力の低下を防ぐことが可能となる。
また、シャフト10の軸方向の上端側において、ステータコア3より突き出たマグネット1の突出部1aの外周側にホール素子7を配置するので、先立って説明した従来例のようにホール素子7設置のためにステータティース間の隙間を広げる必要がない。そのため、ステータ部5の励磁切り替えの分解能を高く維持でき、EGRバルブのような駆動に精度を要する用途に適したブラシレスモータを実現できる。
以上より、実施の形態1によれば、ブラシレスモータは、ロータ部2が有するマグネット1の回転位置を検出するホール素子7を備える。マグネット1は、シャフト10の軸方向においてステータコア3より突き出た突出部1aを有し、ホール素子7は、シャフト10の径方向において突出部1aに対向するステータ部5の樹脂材4に設置されている。この構成により、ホール素子7によるロータ部2の位置検出精度が向上する。
また、実施の形態1によれば、ホール素子7は、環状プレート8に取り付けられ、ステータ部5の樹脂材4には環状プレート8を圧入してネジ止めする環状の溝5aが設けられている。この構成により、環状プレート8が溝5aにより位置決めされた状態で保持されるので、ホール素子7の位置検出精度が向上する。
なお、環状プレート8を、ステータ部5の樹脂材4と同じ線膨張係数の樹脂材(例えば、ポリフェニレンサルファイド(PPS)樹脂)で構成することが望ましい。これにより、熱膨張が生じてもステータ部5と環状プレート8との間に隙間が生じず、両者の熱変形によるがたつきが抑制されるので、さまざまな温度環境においてもホール素子7の位置精度低下を防止することが可能となる。
なお、ステータ部5の樹脂材4と環状プレート8の樹脂材は、線膨張係数が同じであれば、同じ種類の樹脂でなくてもよい。
なお、ステータ部5の樹脂材4と環状プレート8の樹脂材は、線膨張係数が同じであれば、同じ種類の樹脂でなくてもよい。
実施の形態2.
図2は、実施の形態2に係るブラシレスモータを図1(a)のAA線で切断した断面図である。図2において、図1と同一または相当の部分については同一の符号を付し説明を省略する。
実施の形態2では、ステータ部5の溝5aに凹部20を形成し、環状プレート8に凸部21を形成して、凹部20と凸部21とを嵌めあうことにより回転方向の保持をより容易に精度よく行う。
なお、図示例では、凹部20と凸部21の嵌めあいを4箇所形成したが、個数および位置は任意でよい。また、ステータ部5側に凸部21を形成し、環状プレート8側に凹部20を形成してもよい。
図2は、実施の形態2に係るブラシレスモータを図1(a)のAA線で切断した断面図である。図2において、図1と同一または相当の部分については同一の符号を付し説明を省略する。
実施の形態2では、ステータ部5の溝5aに凹部20を形成し、環状プレート8に凸部21を形成して、凹部20と凸部21とを嵌めあうことにより回転方向の保持をより容易に精度よく行う。
なお、図示例では、凹部20と凸部21の嵌めあいを4箇所形成したが、個数および位置は任意でよい。また、ステータ部5側に凸部21を形成し、環状プレート8側に凹部20を形成してもよい。
実施の形態3.
図3は、実施の形態3に係るブラシレスモータの軸方向の断面図である。図3において、図1と同一または相当の部分については同一の符号を付し説明を省略する。
ブラシレスモータは、ロータ部2とホール素子7とが同一空間に設置されている。そのため、このブラシレスモータをEGRバルブ等のアクチュエータに用いた場合、排気ガスおよび水成分などの流体が、シャフト10とカバー12との隙間から内部へ侵入してホール素子7側へ吹き抜けると(図3に矢印で示す)、ホール素子7が故障する可能性がある。そこで、実施の形態3では、ロータ部2が配置される空間とホール素子7が配置される空間とを隔てる隔壁30を設けて、ホール素子7が設置される空間を密閉空間にすることにより、排気ガス等からホール素子7を保護する。
この隔壁30は、ステータ部5の樹脂材4で構成してもよい。
図3は、実施の形態3に係るブラシレスモータの軸方向の断面図である。図3において、図1と同一または相当の部分については同一の符号を付し説明を省略する。
ブラシレスモータは、ロータ部2とホール素子7とが同一空間に設置されている。そのため、このブラシレスモータをEGRバルブ等のアクチュエータに用いた場合、排気ガスおよび水成分などの流体が、シャフト10とカバー12との隙間から内部へ侵入してホール素子7側へ吹き抜けると(図3に矢印で示す)、ホール素子7が故障する可能性がある。そこで、実施の形態3では、ロータ部2が配置される空間とホール素子7が配置される空間とを隔てる隔壁30を設けて、ホール素子7が設置される空間を密閉空間にすることにより、排気ガス等からホール素子7を保護する。
この隔壁30は、ステータ部5の樹脂材4で構成してもよい。
なお、上記実施の形態1〜3ではブラシレスモータの用途としてEGRバルブを例示したが、この用途に限定されるものではない。
また、本発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、各実施の形態の任意の構成要素の変形、または各実施の形態の任意の構成要素の省略が可能である。
1 マグネット、1a 突出部、2 ロータ部、2a 雌ネジ部、3 ステータコア、4 樹脂材、5 ステータ部、5a 溝、6 軸受、7 ホール素子、7a 端子、8 環状プレート、9 ネジ、10 シャフト、10a 雄ネジ部、11,12 カバー、11a コネクタ、11b ターミナル、20 凹部、21 凸部、30 隔壁。
Claims (5)
- シャフトのまわりに複数の極数のマグネットを有するロータ部と、
前記ロータ部の外周側に配置され、コイルが配設されたステータコアが樹脂材により保持されているステータ部と、
前記ステータ部に対して前記ロータ部を回転自在に保持する軸受と、
前記ロータ部が有する前記マグネットの回転位置を検出するホール素子とを備え、
前記マグネットは、前記シャフトの軸方向において前記ステータコアより突き出た突出部を有し、前記ホール素子は、前記シャフトの径方向において前記突出部に対向する前記ステータ部の前記樹脂材に設置されていることを特徴とするブラシレスモータ。 - 前記ホール素子は、環状プレートに取り付けられ、
前記ステータ部の前記樹脂材には、前記環状プレートを圧入してネジ止めする環状の溝が設けられていることを特徴とする請求項1記載のブラシレスモータ。 - 前記環状プレートに、互いに嵌りあう凹部および凸部のいずれか一方が形成され、前記ステータ部の溝に、前記凹部および前記凸部のもう一方が形成されていることを特徴とする請求項2記載のブラシレスモータ。
- 前記環状プレートは、前記ステータ部の前記樹脂材と同じ線膨張係数の樹脂材で構成されていることを特徴とする請求項2または請求項3記載のブラシレスモータ。
- 前記ロータ部が配置される空間と前記ホール素子が配置される空間とを隔てる隔壁を備えることを特徴とする請求項1から請求項4のうちのいずれか1項記載のブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014140626A JP2016019362A (ja) | 2014-07-08 | 2014-07-08 | ブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014140626A JP2016019362A (ja) | 2014-07-08 | 2014-07-08 | ブラシレスモータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016019362A true JP2016019362A (ja) | 2016-02-01 |
Family
ID=55234228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014140626A Pending JP2016019362A (ja) | 2014-07-08 | 2014-07-08 | ブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016019362A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106856388A (zh) * | 2016-12-13 | 2017-06-16 | 北京航天控制仪器研究所 | 基于反电动势数值计算的永磁无刷直流电机霍尔定位方法 |
| JP2023090763A (ja) * | 2020-01-10 | 2023-06-29 | 株式会社不二工機 | 電動弁 |
| WO2024125577A1 (zh) * | 2022-12-15 | 2024-06-20 | 浙江联宜电机有限公司 | 无刷电机用线性型霍尔与感应磁环高精度配合结构 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0233586U (ja) * | 1988-08-25 | 1990-03-02 | ||
| JPH0662782U (ja) * | 1993-02-05 | 1994-09-02 | 株式会社富士通ゼネラル | ブラシレスモータの構造 |
| WO1997033359A1 (en) * | 1996-03-07 | 1997-09-12 | Seiko Epson Corporation | Motor and process for producing the same |
| JP2003235213A (ja) * | 2002-02-07 | 2003-08-22 | Nidec Shibaura Corp | モールドモータ |
| JP2004007926A (ja) * | 2002-05-31 | 2004-01-08 | Sankyo Seiki Mfg Co Ltd | モータ |
| JP2005238461A (ja) * | 2004-02-24 | 2005-09-08 | Aichi Electric Co Ltd | 電動機の樹脂モールド方法および樹脂モールド方法に用いる成形金型 |
-
2014
- 2014-07-08 JP JP2014140626A patent/JP2016019362A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0233586U (ja) * | 1988-08-25 | 1990-03-02 | ||
| JPH0662782U (ja) * | 1993-02-05 | 1994-09-02 | 株式会社富士通ゼネラル | ブラシレスモータの構造 |
| WO1997033359A1 (en) * | 1996-03-07 | 1997-09-12 | Seiko Epson Corporation | Motor and process for producing the same |
| JP2003235213A (ja) * | 2002-02-07 | 2003-08-22 | Nidec Shibaura Corp | モールドモータ |
| JP2004007926A (ja) * | 2002-05-31 | 2004-01-08 | Sankyo Seiki Mfg Co Ltd | モータ |
| JP2005238461A (ja) * | 2004-02-24 | 2005-09-08 | Aichi Electric Co Ltd | 電動機の樹脂モールド方法および樹脂モールド方法に用いる成形金型 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106856388A (zh) * | 2016-12-13 | 2017-06-16 | 北京航天控制仪器研究所 | 基于反电动势数值计算的永磁无刷直流电机霍尔定位方法 |
| CN106856388B (zh) * | 2016-12-13 | 2019-04-30 | 北京航天控制仪器研究所 | 基于反电动势数值计算的永磁无刷直流电机霍尔定位方法 |
| JP2023090763A (ja) * | 2020-01-10 | 2023-06-29 | 株式会社不二工機 | 電動弁 |
| JP7551173B2 (ja) | 2020-01-10 | 2024-09-17 | 株式会社不二工機 | 電動弁 |
| WO2024125577A1 (zh) * | 2022-12-15 | 2024-06-20 | 浙江联宜电机有限公司 | 无刷电机用线性型霍尔与感应磁环高精度配合结构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5401902B2 (ja) | モータ | |
| CN106104991B (zh) | 电动机 | |
| JP5543016B2 (ja) | モータ | |
| CN105745824B (zh) | 具备发动机控制用信号的输出功能的起动发电机 | |
| US20140009044A1 (en) | Rotating electrical machine | |
| KR20100086758A (ko) | 모터 | |
| JP2007151314A (ja) | モータ | |
| CN103516104B (zh) | 马达 | |
| WO2013084270A1 (ja) | 電動機 | |
| JPWO2005040730A1 (ja) | 回転角検出装置 | |
| JP2010115022A (ja) | ブラシレスモータ | |
| JP2010284007A (ja) | 駆動回路内蔵型センサ付きブラッシレスモータ | |
| JP2016019362A (ja) | ブラシレスモータ | |
| JP2009284706A (ja) | ロータ、およびブラシレスモータ | |
| JP6275415B2 (ja) | ブラシレスモータ | |
| KR20180109754A (ko) | 액추에이터 및 전자 클러치 시스템 | |
| CN106208585B (zh) | 无刷马达 | |
| WO2018193616A1 (ja) | Dcモータ、egrバルブ、vgアクチュエータ、およびウエストゲートアクチュエータ | |
| JP2005168249A (ja) | モータのシャフト構造 | |
| JP2009273292A (ja) | ブラシレスモータ | |
| JP2016045084A (ja) | 検出センサ及び始動発電機 | |
| JP2009261149A (ja) | ブラシレスモータ | |
| CN109328428B (zh) | 电气设备 | |
| JP6071850B2 (ja) | 電動機 | |
| JP5037827B2 (ja) | 電気モータにおけるホールセンサの取付構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170711 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170712 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180206 |