JP2016021802A - 電源回路 - Google Patents
電源回路 Download PDFInfo
- Publication number
- JP2016021802A JP2016021802A JP2014144102A JP2014144102A JP2016021802A JP 2016021802 A JP2016021802 A JP 2016021802A JP 2014144102 A JP2014144102 A JP 2014144102A JP 2014144102 A JP2014144102 A JP 2014144102A JP 2016021802 A JP2016021802 A JP 2016021802A
- Authority
- JP
- Japan
- Prior art keywords
- control value
- current control
- current
- dead time
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M3/00—Conversion of DC power input into DC power output
- H02M3/02—Conversion of DC power input into DC power output without intermediate conversion into AC
- H02M3/04—Conversion of DC power input into DC power output without intermediate conversion into AC by static converters
- H02M3/10—Conversion of DC power input into DC power output without intermediate conversion into AC by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M3/145—Conversion of DC power input into DC power output without intermediate conversion into AC by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M3/155—Conversion of DC power input into DC power output without intermediate conversion into AC by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only
- H02M3/156—Conversion of DC power input into DC power output without intermediate conversion into AC by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only with automatic control of output voltage or current, e.g. switching regulators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/38—Means for preventing simultaneous conduction of switches
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/38—Means for preventing simultaneous conduction of switches
- H02M1/385—Means for preventing simultaneous conduction of switches with means for correcting output voltage deviations introduced by the dead time
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Dc-Dc Converters (AREA)
Abstract
【課題】電流モードPWMにおいてデューティを測定することなくデッドタイムを適正化する。
【解決手段】スイッチング回路SWは、直流を分断し、平滑回路Hは、スイッチング回路SWにて分断された直流を平滑化し、スイッチング制御部11は、平滑回路Hの出力電圧が目標値に近づくように電流制御値を算出し、スイッチング回路SWから平滑回路Hに入力される入力電流と、電流制御値との比較結果に基づいてスイッチング回路SWをスイッチング制御する。
【選択図】図1
【解決手段】スイッチング回路SWは、直流を分断し、平滑回路Hは、スイッチング回路SWにて分断された直流を平滑化し、スイッチング制御部11は、平滑回路Hの出力電圧が目標値に近づくように電流制御値を算出し、スイッチング回路SWから平滑回路Hに入力される入力電流と、電流制御値との比較結果に基づいてスイッチング回路SWをスイッチング制御する。
【選択図】図1
Description
本発明の実施形態は、電源回路に関する。
PWM制御のデジタルスイッチング電源回路において、同期整流器ドライバのデッドタイムの最適化制御法には、電圧モードPWMでのデューティ制御値を用いた自律制御法が知られている。
本発明の一つの実施形態は、電流モードPWMにおいてデューティを測定することなくデッドタイムの適正化が可能な電源回路を提供することを目的とする。
本発明の一つの実施形態によれば、スイッチング回路と、平滑回路と、スイッチング制御部とを備える。スイッチング回路は、直流を分断する。平滑回路は、前記スイッチング回路にて分断された直流を平滑化する。スイッチング制御部は、前記平滑回路の出力電圧が目標値に近づくように電流制御値を算出し、前記スイッチング回路から前記平滑回路に入力される入力電流と、前記電流制御値との比較結果に基づいて前記スイッチング回路をスイッチング制御する。
以下に添付図面を参照して、実施形態に係る電源回路を詳細に説明する。なお、これらの実施形態により本発明が限定されるものではない。
(第1実施形態)
図1は、第1実施形態に係る電源回路の概略構成を示すブロック図である。
図1において、電源回路には、直流電源D、スイッチング回路SW、平滑回路H、電流センサSAおよびスイッチング制御部11が設けられている。
図1は、第1実施形態に係る電源回路の概略構成を示すブロック図である。
図1において、電源回路には、直流電源D、スイッチング回路SW、平滑回路H、電流センサSAおよびスイッチング制御部11が設けられている。
スイッチング回路SWは直流電源Dにて生成された直流を分断することができ、ハイサイドスイッチMHおよびロウサイドスイッチMLが設けられている。ハイサイドスイッチMHはpチャンネル電界効果トランジスタ、ロウサイドスイッチMLはnチャンネル電界効果トランジスタを用いることができる。
平滑回路Hはスイッチング回路SWにて分断された直流を平滑化することができ、インダクタLおよびキャパシタCが設けられている。
そして、ハイサイドスイッチMHのソースは直流電源Dに接続され、ハイサイドスイッチMHのドレインはロウサイドスイッチMLのドレインに接続され、ロウサイドスイッチMLのソースは接地されている。ハイサイドスイッチMHのゲートおよびロウサイドスイッチMLのゲートはドライバ22に接続されている。
また、ロウサイドスイッチMLのドレインはインダクタLの一端に接続され、インダクタLの他端はキャパシタCの一端に接続され、キャパシタCの他端は接地されている。また、キャパシタCには負荷Rが並列に接続されている。
直流電源Dが直流電圧Vinを生成することができる。電流センサSAは、スイッチング回路SWから平滑回路Hに入力される入力電流iLを検出することができる。
スイッチング制御部11は、平滑回路Hの出力電圧Voutが目標値Vrに近づくように電流制御値Icを算出することができる。そして、入力電流iLと電流制御値Icとの比較結果に基づいて、スイッチング回路SWをスイッチング制御することができる。
ここで、スイッチング制御部11には、平滑回路Hの出力電圧VoutをAD変換するADコンバータ12、AD変換された出力電圧Voutと基準値Vrとの誤差Erを算出する誤差算出回路13、誤差算出回路13にて算出された誤差Erが0に近づくように電流制御値Icを算出するデジタル補償器14、デジタルコンパレータ18に入力される電流制御値Icに付与される傾きを生成する傾き生成回路15、傾き生成回路15にて生成された傾きを電流制御値Icに加算する加算器16、電流センサSAの検出値をAD変換するADコンバータ17、入力電流iLのデジタル値Isと傾きが付与された電流制御値Irを比較するデジタルコンパレータ18、デジタルコンパレータ18から出力されるリセット信号Rsに基づいてパルス幅が調整されたパルス信号を生成するフリップフロップ19、電流制御値Icが最小値に近づくようにスイッチング回路SWのデッドタイムtd1、td2を制御するデッドタイム補償回路20、パルス信号にデッドタイムtd1、td2を付加することで制御電圧Vg1、Vg2を生成するデッドタイム付加回路21、制御電圧Vg1、Vg2に基づいてPWM信号を生成し、ハイサイドスイッチMHのゲートおよびロウサイドスイッチMLのゲートを駆動するドライバ22が設けられている。なお、デッドタイムtd1は、ハイサイドスイッチMHがオフしてからロウサイドスイッチMLがオンするまでの時間、デッドタイムtd2は、ロウサイドスイッチMLがオフしてからハイサイドスイッチMHがオンするまでの時間である。
なお、傾き生成回路15は、電流制御値Icの傾きの付与の開始点から、傾きが付与された電流制御値Irと入力電流iLのデジタル値Isとの一致点までの時間が、スイッチング回路SWのデューティのみに依存するように電流制御値Icの傾きの生成を開始することができる。
デッドタイム補償回路20には、デッドタイムサーチ部20A、電流制御値観測部20Bおよび電流制御値判定部20Cが設けられている。デッドタイムサーチ部20Aは、スイッチング回路SWのデッドタイムをサーチすることができる。電流制御値観測部20Bは、スイッチング回路SWのデッドタイムがサーチされた時の電流制御値Icを観測することができる。電流制御値判定部20Cは、前回観測された電流制御値Icと今回観測された電流制御値Icとの比較結果に基づいて、電流制御値Icが最小かどうかを判定することができる。
なお、傾き生成回路15は、電流制御値Icの傾きの付与の開始点から、傾きが付与された電流制御値Irと入力電流iLのデジタル値Isとの一致点までの時間が、スイッチング回路SWのデューティのみに依存するように電流制御値Icの傾きの生成を開始することができる。
デッドタイム補償回路20には、デッドタイムサーチ部20A、電流制御値観測部20Bおよび電流制御値判定部20Cが設けられている。デッドタイムサーチ部20Aは、スイッチング回路SWのデッドタイムをサーチすることができる。電流制御値観測部20Bは、スイッチング回路SWのデッドタイムがサーチされた時の電流制御値Icを観測することができる。電流制御値判定部20Cは、前回観測された電流制御値Icと今回観測された電流制御値Icとの比較結果に基づいて、電流制御値Icが最小かどうかを判定することができる。
そして、ドライバ22からPWM信号が出力されることで、ハイサイドスイッチMHおよびロウサイドスイッチMLが相補的にオン/オフされる。この時、ハイサイドスイッチMHがオンした時はロウサイドスイッチMLはオフし、直流電源DからハイサイドスイッチMHを介して入力電流iLがインダクタLに供給されることにより、入力電流iLが上昇し、キャパシタCに電荷が供給され、それに伴って出力電圧Voutが変化する。
一方、ハイサイドスイッチMHがオフした時はロウサイドスイッチMLはオンし、インダクタLに供給される入力電流は下降し、キャパシタCに蓄積された電荷が負荷Rを介して放電され、それに伴って出力電圧Voutが変化する。この時、PWM信号にデッドタイムtd1、td2が付加されることにより、ハイサイドスイッチMHおよびロウサイドスイッチMLが同時にオンするのが防止される。
そして、平滑回路Hの出力電圧VoutはADコンバータ12にてAD変換された後、誤差算出回路13にて基準値Vrと減算されることで誤差Erが算出され、デジタル補償器14に入力される。
そして、デジタル補償器14において、誤差Erが0に近づくように電流制御値Icが算出され、加算器16に出力される。一方、傾き生成回路15では、電流制御値Icに付与される傾きが生成され、加算器16に出力される。そして、傾き生成回路15にて生成された傾きが電流制御値Icに加算されることで電流制御値Irが算出され、デジタルコンパレータ18に入力される。また、一方、入力電流iLは電流センサSAにて検出される。そして、その検出値がADコンバータ17にてAD変換されることで入力電流iLのデジタル値Isが生成され、デジタルコンパレータ18に入力される。そして、デジタルコンパレータ18において、入力電流iLのデジタル値Isが電流制御値Irに一致すると、リセット信号Rsが立ち上げられ、フリップフロップ19がリセットされる。そして、フリップフロップ19において、クロックCKが立ち上がると、出力Qが立ち上げられ、リセット信号Rsが立ち上げられると、出力Qが立ち下げられることで、パルス信号が生成される。そして、デッドタイム付加回路21において、パルス信号にデッドタイムtd1、td2が付加されることで制御電圧Vg1、Vg2が生成され、ドライバ22に出力される。そして、ドライバ22において、制御電圧Vg1、Vg2に基づいてPWM信号が生成され、ハイサイドスイッチMHおよびロウサイドスイッチMLが駆動される。
ここで、デッドタイム補償回路20では、デッドタイムtd1、td2がサーチされ、その時の電流制御値Irが観測される。そして、電流制御値Icが最小値と判断される時のデッドタイムtd1、td2が検知され、そのデッドタイムtd1、td2がデッドタイム付加回路21に出力される。
ここで、電流制御値Icが最小値と判断される時のデッドタイムtd1、td2をPWM信号に付加することにより、デューティを測定することなくデッドタイムtd1、td2を最適化することができ、電流モードでのレギュレーション効率を向上させることができる。
また、出力電圧Voutの揺らぎがデジタル補償器14のゼロ誤差範囲(Zero−error bin)内であれば、定常状態では電流制御値Icは一定である。これに対して、出力電圧Voutの揺らぎがデジタル補償器14のゼロ誤差範囲(Zero−error bin)内である場合においても、電流波形のノイズによってデューティに揺らぎが発生する。このため、電流制御値Icを用いてデッドタイムtd1、td2を最適化することにより、デューティ測定値を用いる必要がなくなることから、電流波形のノイズによってデューティに揺らぎが発生する場合においても、電流制御値Icがノイズによる揺らぎに埋もれることがなく、デッドタイムtd1、td2の最適化処理の安定化を図ることができる。
ここで、デッドタイム補償回路20では、デッドタイムtd1、td2がサーチされ、その時の電流制御値Irが観測される。そして、電流制御値Icが最小値と判断される時のデッドタイムtd1、td2が検知され、そのデッドタイムtd1、td2がデッドタイム付加回路21に出力される。
ここで、電流制御値Icが最小値と判断される時のデッドタイムtd1、td2をPWM信号に付加することにより、デューティを測定することなくデッドタイムtd1、td2を最適化することができ、電流モードでのレギュレーション効率を向上させることができる。
また、出力電圧Voutの揺らぎがデジタル補償器14のゼロ誤差範囲(Zero−error bin)内であれば、定常状態では電流制御値Icは一定である。これに対して、出力電圧Voutの揺らぎがデジタル補償器14のゼロ誤差範囲(Zero−error bin)内である場合においても、電流波形のノイズによってデューティに揺らぎが発生する。このため、電流制御値Icを用いてデッドタイムtd1、td2を最適化することにより、デューティ測定値を用いる必要がなくなることから、電流波形のノイズによってデューティに揺らぎが発生する場合においても、電流制御値Icがノイズによる揺らぎに埋もれることがなく、デッドタイムtd1、td2の最適化処理の安定化を図ることができる。
図2は、入力電流(インダクタ電流)波形と電流制御値の代表的な波形を示すタイミングチャートである。
図2において、定常状態では電流制御値Icは一定である。ここで、傾き生成回路15にて生成された傾きが−mとすると、この傾きを電流制御値Icに付与することで電流制御値Irを生成する。そして、ハイサイドスイッチMHのデューティをdとすると、デューティdで与えられる時間だけハイサイドスイッチMHがオンする。そして、ハイサイドスイッチMHがオンすると、入力電流iLのデジタル値Isが増加する。そして、入力電流iLのデジタル値IsのピークPKで電流制御値Irと一致すると、その時点がデジタルコンパレータ18にて検知される。この時、リセット信号Rsが立ち下げられることでハイサイドスイッチMHがオフされ、入力電流iLのデジタル値Isが増加から減少に転じる。
ここで、電流制御値Icに傾きを付与することにより、デューティdの増大に伴って電流制御値Irを減少させることができる。このため、電流制御値Icにずれがある場合においても、入力電流iLのデジタル値Isと電流制御値Irとの一致点の検知の安定化を図ることができる。
また、電流制御値Icは(PK+m*d)の関数となるが、傾きmを一定にすれば、m*dの項はデューティdに依存し、最適なデッドタイムでデューティdが最小となる。このため、電流制御値Icの傾きmの付与の開始点(スロープ開始)から、電流制御値Irと入力電流iLのデジタル値Isとの一致点(コンパレータ検知)までの時間がデューティdのみに依存することが好ましい。
図2において、定常状態では電流制御値Icは一定である。ここで、傾き生成回路15にて生成された傾きが−mとすると、この傾きを電流制御値Icに付与することで電流制御値Irを生成する。そして、ハイサイドスイッチMHのデューティをdとすると、デューティdで与えられる時間だけハイサイドスイッチMHがオンする。そして、ハイサイドスイッチMHがオンすると、入力電流iLのデジタル値Isが増加する。そして、入力電流iLのデジタル値IsのピークPKで電流制御値Irと一致すると、その時点がデジタルコンパレータ18にて検知される。この時、リセット信号Rsが立ち下げられることでハイサイドスイッチMHがオフされ、入力電流iLのデジタル値Isが増加から減少に転じる。
ここで、電流制御値Icに傾きを付与することにより、デューティdの増大に伴って電流制御値Irを減少させることができる。このため、電流制御値Icにずれがある場合においても、入力電流iLのデジタル値Isと電流制御値Irとの一致点の検知の安定化を図ることができる。
また、電流制御値Icは(PK+m*d)の関数となるが、傾きmを一定にすれば、m*dの項はデューティdに依存し、最適なデッドタイムでデューティdが最小となる。このため、電流制御値Icの傾きmの付与の開始点(スロープ開始)から、電流制御値Irと入力電流iLのデジタル値Isとの一致点(コンパレータ検知)までの時間がデューティdのみに依存することが好ましい。
図3(a)〜図3(c)は、デッドタイムtd1が変化した時のインダクタ電流およびスイッチングノード電圧との関係を示すタイミングチャートである。なお、図3(a)はvg1の立ち下りからvg2の立ち上がりまでの最適デッドタイムtd1pとvg2の立ち下りからvg1の立ち上がりまでの最適デッドタイムtd2pに対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。なお、<VLX>はスイッチングノード電圧VLXの平均値である。図3(b)はデッドタイムtd1が長すぎて、同期整流器のロウサイドスイッチMLのボディダイオードに電流が流れている時に対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。図3(c)はデッドタイムtd1が短すぎて、同期整流器に貫通電流が流れている時に対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。この時、入力電流iLの傾きは常に(VLX−<VLX>)/Lである。また、図3(b)および図3(c)の入力電流iLの波形には、最適デッドタイムtd1pにおける入力電流iLの波形を破線で重ねて示した。入力電流iLの波形は、デッドタイムtd1が最適化された場合より最適化されてない場合の方が僅かに平均値が大きくなるため、負荷電流が一定の場合は電荷バランスのために極僅かに電流波形全体が下がる。ただし、この電流波形は、実際には電流値のADコンバータのLSBに比べると無視できる程度にしか降下しない。従って、デジタルコンパレータ18が検知するピークPK1〜PK3は、デッドタイムtd1が最適化された場合より最適化されてない場合の方が僅かに大きくなる。
図4(a)〜図4(c)は、デッドタイムtd2が変化した時のインダクタ電流およびスイッチングノード電圧を示すタイミングチャートである。なお、図4(a)は、最適デッドタイムtd1p、td2pに対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。図4(b)は、デッドタイムtd2が長すぎて、同期整流器のロウサイドスイッチMLのボディダイオードに電流が流れている時に対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。図4(c)は、デッドタイムtd2が短すぎて、同期整流器に貫通電流が流れている時に対応するスイッチングノード電圧VLXと入力電流iLの波形を示す。この時、入力電流iLの傾きは常に(VLX−<VLX>)/Lである。また、図4(b)および図4(c)の入力電流iLの波形には、最適デッドタイムtd2pにおける入力電流iLの波形を破線で重ねて示した。この場合も負荷電流が一定の時には電荷バランスのために極僅かに電流波形が上下するが無視できる程度である。従って、デジタルコンパレータ18が検知するピークPK4〜PK6はいずれの状態でも変化しない。このため、デッドタイムtd1、td2いずれについても最適値をとっている場合に、(PK+m*d)が最小となるため、電流制御値Icも最小値を取ると予想される。
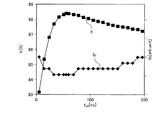
図5は、デッドタイムtd1が変化した時のレギュレーション効率および電流制御値を示す図である。
図5において、入力電圧Vin=5V、出力電圧Vout=1.8V、L=4.7uH、C=188uF、スイッチング周波数200kHz、負荷電流Iload=3Aにおいて、実際にデッドタイムtd2を固定し、デッドタイムtd1を変化させた。この時、電流制御値Icの最小点とレギュレーション効率ηの最高点が一致していることがわかる。
図5において、入力電圧Vin=5V、出力電圧Vout=1.8V、L=4.7uH、C=188uF、スイッチング周波数200kHz、負荷電流Iload=3Aにおいて、実際にデッドタイムtd2を固定し、デッドタイムtd1を変化させた。この時、電流制御値Icの最小点とレギュレーション効率ηの最高点が一致していることがわかる。
図6は、デッドタイムtd2が変化した時のレギュレーション効率および電流制御値を示す図である。
図6において、図5と同様の条件でデッドタイムtd1を最適値に固定し、デッドタイムtd2を変化させた。この時、電流制御値Icの最小点とレギュレーション効率ηの最高点が一致していることがわかる。
図6において、図5と同様の条件でデッドタイムtd1を最適値に固定し、デッドタイムtd2を変化させた。この時、電流制御値Icの最小点とレギュレーション効率ηの最高点が一致していることがわかる。
(第2実施形態)
図7は、第2実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図7において、制御電圧vg1は、クロックCKの立ち上がりからデッドタイムtd2後にハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、クロックCKの立ち上がりでロウサイドスイッチMLをオフさせ、デジタルコンパレータ18の検知からデッドタイムtd1後にオンさせる。この時、傾き生成回路15のスロープ開始点は、ロウサイドスイッチMLがオフされる時点からデッドタイムtd2分だけ遅らせることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
図7は、第2実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図7において、制御電圧vg1は、クロックCKの立ち上がりからデッドタイムtd2後にハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、クロックCKの立ち上がりでロウサイドスイッチMLをオフさせ、デジタルコンパレータ18の検知からデッドタイムtd1後にオンさせる。この時、傾き生成回路15のスロープ開始点は、ロウサイドスイッチMLがオフされる時点からデッドタイムtd2分だけ遅らせることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
(第3実施形態)
図8は、第3実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図8において、制御電圧vg1は、クロックCKの立ち上がりでハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、デジタルコンパレータ18の検知からデッドタイムtd1後にロウサイドスイッチMLをオンさせ、クロックCKの立ち上がりから(T−td2)後にオフさせる。ただし、Tはスイッチング周期である。この時、傾き生成回路15のスロープ開始点は、デッドタイムtd2に寄らずに固定させることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
図8は、第3実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図8において、制御電圧vg1は、クロックCKの立ち上がりでハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、デジタルコンパレータ18の検知からデッドタイムtd1後にロウサイドスイッチMLをオンさせ、クロックCKの立ち上がりから(T−td2)後にオフさせる。ただし、Tはスイッチング周期である。この時、傾き生成回路15のスロープ開始点は、デッドタイムtd2に寄らずに固定させることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
(第4実施形態)
図9は、第4実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図9において、制御電圧vg1は、クロックCKの立ち上がりからデッドタイムtd2の最大値td2m後にハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、クロックCKの立ち上がりから(td2m−td2)後にロウサイドスイッチMLをオフさせ、デジタルコンパレータ18の検知からデッドタイムtd1後にオンさせる。この時、傾き生成回路15のスロープ開始点は、デッドタイムtd2に寄らずに固定させることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
図9は、第4実施形態に係る電源回路におけるスロープ開始からコンパレータ検知までの制御電圧の波形を示すタイミングチャートである。
図9において、制御電圧vg1は、クロックCKの立ち上がりからデッドタイムtd2の最大値td2m後にハイサイドスイッチMHをオンさせ、デジタルコンパレータ18の検知でオフさせる。制御電圧vg2は、クロックCKの立ち上がりから(td2m−td2)後にロウサイドスイッチMLをオフさせ、デジタルコンパレータ18の検知からデッドタイムtd1後にオンさせる。この時、傾き生成回路15のスロープ開始点は、デッドタイムtd2に寄らずに固定させることにより、スロープ開始からコンパレータ検知までの時間をデューティdのみに依存させることができる。
(第5実施形態)
図10は、第5実施形態に係る電源回路におけるデッドタイムの適正化動作を示すフローチャートである。なお、tdはデッドタイムでtd1であってもよいし、td2であってもよい。tdmはデッドタイムtdの最大値、tdpは最適デッドタイム、Icpは電流制御値Icの最適値である。
図10において、定時間ごと又は負荷変動などを示すトリガーが入ると、デッドタイムtdを最大値tdmにリセットする(S1)。次に、最適デッドタイムtdpにデッドタイムtdを設定し(S2)、電流制御値Icを最適値Icpに設定する(S3)。次に、デッドタイムtdを微小値Δtdだけ減らし(S4)、n(nは正の整数)サイクルだけ待機する(S5)。なお、nは、デッドタイムtdを微小値Δtdだけ減らした時に電流制御値Icが定常状態に落ち着くまでの時間に設定することができる。次に、電流制御値Icが最適値Icpに等しいかどうかを判断し(S6)、等しい場合はS4に戻ってS4〜S6の処理を繰り返す。一方、電流制御値Icが最適値Icpに等しくない場合、電流制御値Icが最適値Icpより小さいかどうかを判断し(S7)、小さい場合はS2に戻ってS2〜S7の処理を繰り返す。一方、電流制御値Icが最適値Icp以上の場合、デッドタイムtdを最適デッドタイムtdpに設定する(S8)。
この方法では、トリガーが入ると、デッドタイムtdの最適化を最大値tdmから開始することができる。なお、図5および図6からも判るように、デッドタイムtdが短すぎると、レギュレーション効率ηの低下が著しいため、安全を期すためにデッドタイムtdは電流制御値Icが最小となるデッドタイムtdのうち、最大の値を取ることができる。
図10は、第5実施形態に係る電源回路におけるデッドタイムの適正化動作を示すフローチャートである。なお、tdはデッドタイムでtd1であってもよいし、td2であってもよい。tdmはデッドタイムtdの最大値、tdpは最適デッドタイム、Icpは電流制御値Icの最適値である。
図10において、定時間ごと又は負荷変動などを示すトリガーが入ると、デッドタイムtdを最大値tdmにリセットする(S1)。次に、最適デッドタイムtdpにデッドタイムtdを設定し(S2)、電流制御値Icを最適値Icpに設定する(S3)。次に、デッドタイムtdを微小値Δtdだけ減らし(S4)、n(nは正の整数)サイクルだけ待機する(S5)。なお、nは、デッドタイムtdを微小値Δtdだけ減らした時に電流制御値Icが定常状態に落ち着くまでの時間に設定することができる。次に、電流制御値Icが最適値Icpに等しいかどうかを判断し(S6)、等しい場合はS4に戻ってS4〜S6の処理を繰り返す。一方、電流制御値Icが最適値Icpに等しくない場合、電流制御値Icが最適値Icpより小さいかどうかを判断し(S7)、小さい場合はS2に戻ってS2〜S7の処理を繰り返す。一方、電流制御値Icが最適値Icp以上の場合、デッドタイムtdを最適デッドタイムtdpに設定する(S8)。
この方法では、トリガーが入ると、デッドタイムtdの最適化を最大値tdmから開始することができる。なお、図5および図6からも判るように、デッドタイムtdが短すぎると、レギュレーション効率ηの低下が著しいため、安全を期すためにデッドタイムtdは電流制御値Icが最小となるデッドタイムtdのうち、最大の値を取ることができる。
(第6実施形態)
図11は、第6実施形態に係る電源回路におけるデッドタイムの適正化動作を示すフローチャートである。なお、tdsは、デッドタイムtdの前回の最適値である。
図11において、デッドタイムtdをデッドタイムtdsに設定する。そして、定時間ごと又は負荷変動などを示すトリガーが入ると(S11)、最適デッドタイムtdpにデッドタイムtdを設定し(S12)、電流制御値Icを最適値Icpに設定する(S13)。次に、デッドタイムtdを微小値Δtdだけ増やし(S14)、電流制御値Icが最適値Icpより大きいかどうかを判断する(S15)。大きくない場合はS12に戻ってS12〜S15の処理を繰り返す。一方、電流制御値Icが最適値Icpより大きい場合、最適デッドタイムtdpをデッドタイムtdに設定し(S16)、最適デッドタイムtdpにデッドタイムtdを設定する(S17)。次に、電流制御値Icを最適値Icpに設定し(S18)、デッドタイムtdを微小値Δtdだけ減らす(S19)。
次に、電流制御値Icが最適値Icpに等しいかどうかを判断し(S20)、等しい場合はS19に戻ってS19〜S20の処理を繰り返す。一方、電流制御値Icが最適値Icpに等しくない場合、電流制御値Icが最適値Icpより小さいかどうかを判断し(S21)、小さい場合はS17に戻ってS17〜S21の処理を繰り返す。一方、電流制御値Icが最適値Icp以上の場合、デッドタイムtdを最適デッドタイムtdpに設定する(S22)。
この方法では、トリガーが入ると、前回の最適値から探索を開始することができる。なお、図5および図6からも判るように、デッドタイムtdが短すぎると、レギュレーション効率ηの低下が著しいため、安全を期すためにデッドタイムtdは電流制御値Icが最小となるデッドタイムtdのうち、最大の値を取ることができる。
図11は、第6実施形態に係る電源回路におけるデッドタイムの適正化動作を示すフローチャートである。なお、tdsは、デッドタイムtdの前回の最適値である。
図11において、デッドタイムtdをデッドタイムtdsに設定する。そして、定時間ごと又は負荷変動などを示すトリガーが入ると(S11)、最適デッドタイムtdpにデッドタイムtdを設定し(S12)、電流制御値Icを最適値Icpに設定する(S13)。次に、デッドタイムtdを微小値Δtdだけ増やし(S14)、電流制御値Icが最適値Icpより大きいかどうかを判断する(S15)。大きくない場合はS12に戻ってS12〜S15の処理を繰り返す。一方、電流制御値Icが最適値Icpより大きい場合、最適デッドタイムtdpをデッドタイムtdに設定し(S16)、最適デッドタイムtdpにデッドタイムtdを設定する(S17)。次に、電流制御値Icを最適値Icpに設定し(S18)、デッドタイムtdを微小値Δtdだけ減らす(S19)。
次に、電流制御値Icが最適値Icpに等しいかどうかを判断し(S20)、等しい場合はS19に戻ってS19〜S20の処理を繰り返す。一方、電流制御値Icが最適値Icpに等しくない場合、電流制御値Icが最適値Icpより小さいかどうかを判断し(S21)、小さい場合はS17に戻ってS17〜S21の処理を繰り返す。一方、電流制御値Icが最適値Icp以上の場合、デッドタイムtdを最適デッドタイムtdpに設定する(S22)。
この方法では、トリガーが入ると、前回の最適値から探索を開始することができる。なお、図5および図6からも判るように、デッドタイムtdが短すぎると、レギュレーション効率ηの低下が著しいため、安全を期すためにデッドタイムtdは電流制御値Icが最小となるデッドタイムtdのうち、最大の値を取ることができる。
(第7実施形態)
図10または図11の方法に従って制御電圧vg1の立ち下がりから制御電圧vg2の立ち上がりまでのデッドタイムtd1を最適化した後、制御電圧vg2の立ち下がりから制御電圧vg1の立ち上がりまでのデッドタイムtd2をtd2=αtd1(αは定数)として決定するようにしてもよい。
あるいは、予めtd2=αtd1として比を固定したまま同時に変化するようにし、図10または図11の方法に従ってデッドタイムtd1を最適化するようにしてもよい。
あるいは、図10または図11の方法に従ってデッドタイムtd1、td2をそれぞれ個別に最適化するようにしてもよい。
図10または図11の方法に従って制御電圧vg1の立ち下がりから制御電圧vg2の立ち上がりまでのデッドタイムtd1を最適化した後、制御電圧vg2の立ち下がりから制御電圧vg1の立ち上がりまでのデッドタイムtd2をtd2=αtd1(αは定数)として決定するようにしてもよい。
あるいは、予めtd2=αtd1として比を固定したまま同時に変化するようにし、図10または図11の方法に従ってデッドタイムtd1を最適化するようにしてもよい。
あるいは、図10または図11の方法に従ってデッドタイムtd1、td2をそれぞれ個別に最適化するようにしてもよい。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
11 スイッチング制御部、12、17 ADコンバータ、13 誤差算出回路、14 デジタル補償器、15 傾き生成回路、16 加算器、18 デジタルコンパレータ、19 フリップフロップ、20 デッドタイム補償回路、21 デッドタイム付加回路、22 ドライバ、SW スイッチング回路、H 平滑回路、SA 電流センサ、L インダクタ、C キャパシタ、R 負荷、MH ハイサイドスイッチ、ML ロウサイドスイッチ、20A デッドタイムサーチ部、20B 電流制御値観測部、20C 電流制御値判定部
Claims (5)
- 直流を分断するスイッチング回路と、
前記スイッチング回路にて分断された直流を平滑化する平滑回路と、
前記平滑回路の出力電圧が目標値に近づくように電流制御値を算出し、前記スイッチング回路から前記平滑回路に入力される入力電流と、前記電流制御値との比較結果に基づいて前記スイッチング回路をスイッチング制御するスイッチング制御部とを備える電源回路。 - 前記スイッチング制御部は、前記電流制御値が最小値に近づくように前記スイッチング回路のデッドタイムを制御するデッドタイム補償回路を備える請求項1に記載の電源回路。
- 前記デッドタイム補償回路は、
前記デッドタイムをサーチするデッドタイムサーチ部と、
前記デッドタイムがサーチされた時の前記電流制御値を観測する電流制御値観測部と、
前回観測された前記電流制御値と今回観測された前記電流制御値との比較結果に基づいて、前記電流制御値が最小かどうかを判定する電流制御値判定部とを備える請求項2に記載の電源回路。 - 前記平滑回路の出力電圧が目標値に近づくように前記電流制御値を算出するデジタル補償器と、
前記スイッチング回路から前記平滑回路に入力される入力電流と、前記電流制御値とを比較するコンパレータと、
前記コンパレータに入力される前記電流制御値に傾きを付与する傾き補償回路を備える請求項1から3のいずれか1項に記載の電源回路。 - 前記傾き補償回路は、前記電流制御値の傾きの付与の開始点から、前記傾きが付与された前記電流制御値と前記入力電流との一致点までの時間が、前記スイッチング回路のデューティのみに依存するように前記電流制御値の傾きの付与を開始する請求項4に記載の電源回路。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014144102A JP2016021802A (ja) | 2014-07-14 | 2014-07-14 | 電源回路 |
| US14/638,891 US9621039B2 (en) | 2014-07-14 | 2015-03-04 | Power supply circuit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014144102A JP2016021802A (ja) | 2014-07-14 | 2014-07-14 | 電源回路 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016021802A true JP2016021802A (ja) | 2016-02-04 |
Family
ID=55068334
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014144102A Pending JP2016021802A (ja) | 2014-07-14 | 2014-07-14 | 電源回路 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9621039B2 (ja) |
| JP (1) | JP2016021802A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112688559A (zh) * | 2020-12-17 | 2021-04-20 | 南京天之立科技有限公司 | 一种开关电源电路 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102280573B1 (ko) * | 2014-06-09 | 2021-07-22 | 삼성전자주식회사 | 적응적 데드 타임 제어 기능을 갖는 구동 회로, 전압 컨버터 및 데드 타임 제어 방법 |
| JP2016048988A (ja) * | 2014-08-27 | 2016-04-07 | 株式会社東芝 | 電源回路とその制御方法 |
| CN106100393B (zh) * | 2016-07-14 | 2018-11-20 | 中车大连电力牵引研发中心有限公司 | 单相四象限整流器死区补偿方法和装置 |
| JP6858725B2 (ja) * | 2018-04-20 | 2021-04-14 | 株式会社京三製作所 | Dc/dcコンバータ、及びdc/dcコンバータの制御方法 |
| TWI661662B (zh) | 2018-10-17 | 2019-06-01 | 財團法人工業技術研究院 | 盲時區間電壓補償裝置及其方法 |
| CN115280655A (zh) * | 2020-04-06 | 2022-11-01 | 罗姆股份有限公司 | 开关电路、开关电源、开关电源的栅极驱动器电路、开关电源的控制电路 |
| KR102921043B1 (ko) | 2021-03-03 | 2026-02-03 | 삼성전자주식회사 | 데드 타임 컨트롤러 및 이를 포함하는 dc-dc 컨버터 |
| US11831235B1 (en) * | 2022-08-26 | 2023-11-28 | dcbel Inc. | Multi-level power converter with software control of switches and deadtime |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3064929B2 (ja) | 1996-11-11 | 2000-07-12 | 株式会社日立製作所 | 誘導電動機の制御方法 |
| JP3738883B2 (ja) | 1999-11-18 | 2006-01-25 | 富士電機機器制御株式会社 | 電圧形pwmインバータのデッドタイム補償装置 |
| US7456620B2 (en) | 2004-12-03 | 2008-11-25 | The Regents Of The University Of Colorado | Determining dead times in switched-mode DC-DC converters |
| US7902803B2 (en) * | 2005-03-04 | 2011-03-08 | The Regents Of The University Of Colorado | Digital current mode controller |
| JP2010011702A (ja) | 2008-06-30 | 2010-01-14 | Mitsubishi Electric Corp | 電力変換装置 |
| JP5486954B2 (ja) * | 2010-02-19 | 2014-05-07 | 株式会社東芝 | スイッチング電源装置 |
| JP2013062952A (ja) | 2011-09-13 | 2013-04-04 | Ricoh Co Ltd | スイッチング回路、電子回路及びスイッチング方法 |
| US20140125306A1 (en) * | 2012-11-07 | 2014-05-08 | Infineon Technologies North America Corp. | Switching Regulator Control with Nonlinear Feed-Forward Correction |
-
2014
- 2014-07-14 JP JP2014144102A patent/JP2016021802A/ja active Pending
-
2015
- 2015-03-04 US US14/638,891 patent/US9621039B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112688559A (zh) * | 2020-12-17 | 2021-04-20 | 南京天之立科技有限公司 | 一种开关电源电路 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160013720A1 (en) | 2016-01-14 |
| US9621039B2 (en) | 2017-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016021802A (ja) | 電源回路 | |
| KR102194247B1 (ko) | 영전압 스위칭을 위한 제어 회로 및 이를 포함하는 벅 컨버터 | |
| JP5163283B2 (ja) | 力率改善回路 | |
| EP2940848B1 (en) | Dc-to-dc converter | |
| US8493050B2 (en) | Control circuit for switching power supply unit, electronic device and method for controlling switching power supply unit | |
| US9502976B2 (en) | Power supply circuit and control method for the same | |
| JP6561612B2 (ja) | スイッチング電源の制御装置 | |
| US9013166B2 (en) | DC-DC converter controller | |
| KR20120079763A (ko) | 스위치 제어 회로, 이를 이용하는 컨버터, 및 스위치 제어 방법 | |
| EP3079249A3 (en) | Constant on-time pulse width control-based scheme used in voltage converter | |
| US8836294B2 (en) | Switching regulator and control circuit and method therefor | |
| US20150333611A1 (en) | Accurate zero current detector circuit in switching regulators | |
| JP5402469B2 (ja) | 電力変換装置及び制御回路 | |
| US20130300397A1 (en) | Power converter | |
| JP6787505B2 (ja) | スイッチング電源装置の制御方法および制御回路 | |
| US20120176108A1 (en) | Dc-to-dc converter | |
| US20160056719A1 (en) | Power circuit and control method therefor | |
| US9190910B2 (en) | Power circuit | |
| JP5955294B2 (ja) | スイッチング電源装置 | |
| JP5493916B2 (ja) | 昇降圧dc−dcコンバータおよびスイッチング制御回路 | |
| JP2016167896A (ja) | Dc/dcコンバータ | |
| US8866512B2 (en) | Feedback terminal of power converter having programming function for parameter setting | |
| US9602002B2 (en) | Switching power supply device | |
| KR20150006307A (ko) | 스위치 제어 장치, 이를 포함하는 전력 공급 장치, 및 그 구동 방법 | |
| JP2013135511A (ja) | 電源回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20151102 |